基于顆粒識別分析系統的碎屑流堆積物顆粒識別和統計方法研究
2021-01-21 03:12:22彭雙麒
水文地質工程地質 2021年1期
陳 達,許 強,鄭 光,彭雙麒,王 卓,何 攀
(成都理工大學地質災害防治與地質環境保護國家重點實驗室,四川 成都 610059)
碎屑流是一種高速遠程潰散性滑坡,具有非常高的運動速度和極大的位移,速度在30 m/s 以上[1],具有極大的破壞力。為研究碎屑流運動特性及運動機理,有必要進行堆積物粒度定量分析,這也是碎屑流災害研究的重點。傳統顆粒的測量主要依靠人工,如需通過生成高分辨率數字地表模型(Digital Surface Model,DSM)對堆積物粒度進行人工解譯[2-4],存在效率低、精度不高以及人為因素誤差大等不足。
計算機數字圖像處理技術具有自動化、高效快捷等特點,被廣泛運用于顆粒識別。吳義祥[5]研究了土細觀結構圖像的定量分析系統,可以獲取細小顆粒面積、最長弦長度等基本要素;施斌等[6]使用Videolab圖像處理系統直接分析SEM 等照片,定量處理土顆粒微細形狀、大小和比例關系;涂新斌等[7]通過Qwin軟件處理顆粒二值圖像,獲得了顆粒數、長度、寬度等顆粒數字特征;梁雙華等[8]提出Mapinfo-Photoshop計算方法,利用Photoshop 圖像處理功能和Mapinfo的統計分析功能,對土顆粒圖像進行信息提取,定量表征顆粒、孔隙的個數以及周長、平均孔徑等參數,極大地降低了圖像分析費用,提高效率;Bai Baojun 等[9]通過Imagej 軟件,直接將頁巖原始孔隙圖像進行二值化處理,進而定量統計孔隙、顆粒發育情況,得出孔隙率。可以看出,這些研究都是為了定量化分析圖像的細觀特征,實現圖像自動識別,得出孔隙、顆粒的結構參數和數量特征。但是,這些方法在以下關鍵問題上存在一定的缺陷:(1)設定研究最小顆粒粒徑及較小粒徑顆粒識別方法;(2)一個圖像中可能有上千個顆粒和孔隙,形狀復雜,分布不均,宏觀特征參數已經不能滿足研究需要,為此需要一些特定的參數,分析每個顆粒的形狀、大小,以此來反映顆粒系統特征。
孔隙(顆粒)及裂隙圖像識別與分析系統(Pores and Cracks Analysis System,PCAS),可以定量分析碎屑流堆積物粒度特征,準確獲得堆積物顆粒結構的幾何參數和統計參數,且操作簡單,具有自動化和可重復等優點。PCAS 在顆粒識別中,存在著三個參數的選取問題:閾值(T)、孔喉封閉半徑(r)、最小孔隙面積(S0)。該方法在滑坡堆積物粒度分析中具有很好的效果,但實用范例很少,目前僅彭雙麒等[10-11]通過PCAS 系統研究了碎屑流堆積體,得出碎屑流堆積物顆粒分布的一般規律,但沒有具體闡述PCAS顆粒識別系統的工作原理、參數意義以及參數選取方法。為此,本文通過PCAS 軟件對貴州納雍崩塌碎屑流堆積物顆粒特征進行分析,得出圖像識別系統中閾值、孔喉封閉半徑、最小孔隙面積合適的參數取值,為PCAS 在崩塌堆積物顆粒的定量研究中提供了一個高效可行的方案。
1 方法介紹
PCAS 圖像識別步驟見圖1。
首先將圖像導入PCAS 軟件,調整閾值(T)進行二值化處理,區分出孔隙和顆粒;然后選取合適的孔喉封閉半徑(r)和最小孔隙面積(S0),最后孔隙和顆粒的各種幾何參數將匯集于數據表,包括個數、長度、寬度、面積、形狀系數、定向性等,并統計得到顆粒和孔隙的分形維數、表觀孔隙率、面積概率分布指數等統計參數,實現孔隙和顆粒結構的定量分析。本次主要研究顆粒個數和長度兩個參數。
PCAS 得出的參數都是以像素為單位,可以通過換算得到實際的幾何參數,如式(1)、(2)[12]:

式中:R—圖像的分辨率;
S、C—像素面積和像素周長;
St、Ct—真實面積和真實周長。
PCAS 主要由三個參數確定:閾值(T)、孔喉封閉半徑(r)、最小孔隙面積(S0)。本節主要通過介紹這三個參數的選取意義,分析PCAS的原理與方法。
1.1 閾值(T)
首先獲取崩塌堆積物的正射影像圖,圈定分析的范圍,獲得適當的圖片大小,即開始圖像識別。在圖像識別前,需要進行二值化處理,獲得二值圖像,PCAS 采用閾值分割法進行圖像二值化[13],所謂閾值分割法,是基于影像圖中各個組成要素的灰度值的不同,通過選擇適當的灰度閾值將影像圖轉換為二值圖像,根據圖像中孔隙與顆粒的灰度值不同加以區分[14]。具體來說,圖片由像素組成,而每一個像素是由紅綠藍(RGB)三原色分量組成,軟件自動選取一個特征顏色值作為灰度值X(RGB),計算圖像中各個部分的灰度值P(RGB)與這個特征灰度值的距離[12]:

與選取的閾值作對比,d小于閾值為黑色,識別為孔隙;大于閾值為白色,識別為顆粒;從而把圖片識別成灰度圖像(圖2b)。
具體步驟為:起初設定較大的閾值,此時較多為顆粒的單元被識別為孔隙(黑色),再慢慢地減小閾值,直到黑色的細小顆粒單元被轉化為白色,能清晰地識別出顆粒與孔隙,此時為較好的閾值。為了減少人為判斷誤差,通常對不同堆積區進行二值化處理,求取閾值平均值,作為選定的最終閾值。
1.2 孔喉封閉半徑(r)
顆粒與顆粒間并不是完全分開,會有連接(圖2b),在二值化過程中,顆粒通過細小連接,會被錯誤識別為一個顆粒。因此,PCAS 在識別過程中,會設定一個特定直徑的孔喉封閉半徑,定義為腐蝕結構元素的半徑r,對圖像做腐蝕運算[15]。當顆粒之間連接的直徑小于2r時,則區分為兩個獨立區域,分開顆粒(圖2c),再將剩余像素歸并到顆粒上,實現顆粒與顆粒的自動區分[16]。
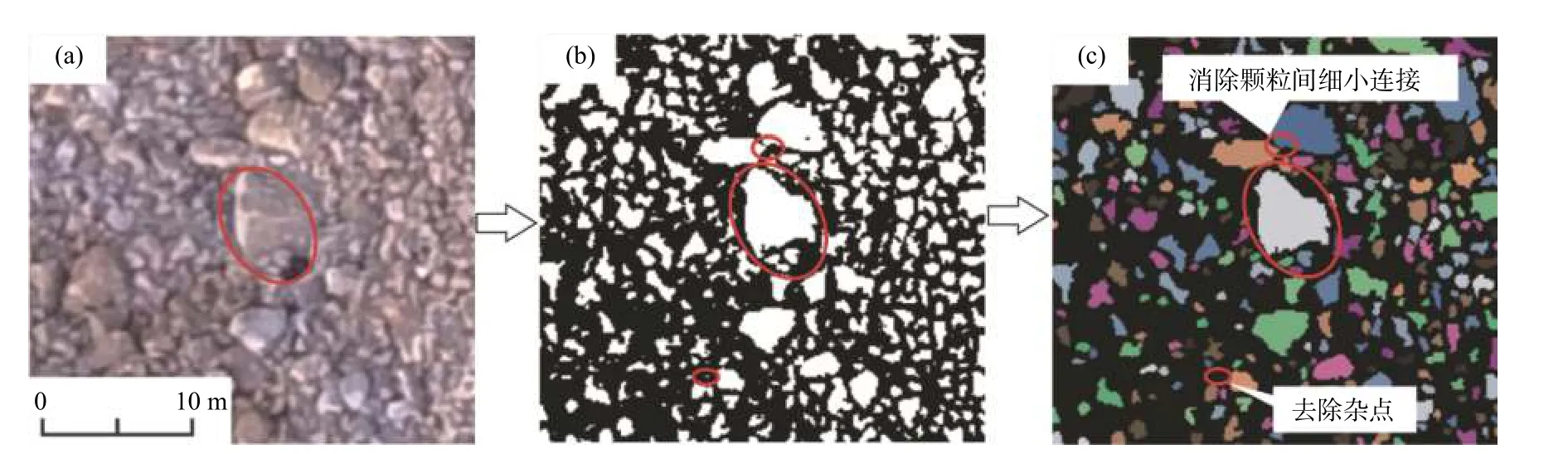
圖2 PCAS 在T/r/S0=170/1/10時的顆粒識別結果Fig.2 PCAS particle recognition results at T/r/S0=170/1/10
1.3 最小孔隙面積(S0)
圖片是由一系列像素點組成,當像素較低時,無法真實表征顆粒的真實形狀,需要將這些像素點及噪聲去除。因此,PCAS 識別程序中設定了可識別分析的最小孔隙面積,即設定一個面積識別下限,小于該值的顆粒面積都識別為雜點而被去除。在圖2(b)可以看到二值圖像中呈現為白色的細小雜點,設置最小孔隙面積,可以消除這些雜點(圖2c),有效識別出顆粒。
PCAS 具有手動編輯的功能,對于顆粒不完整或較多明顯雜點,可以通過界面的“Edit binary image”功能,手動修復,歸并顆粒,區分出顆粒邊界,減小系統誤差。
2 PCAS 最優參數探索
以貴州納雍普灑村崩塌-碎屑流為例,運用PCAS對其粒度進行分析,結合彭雙麒等[2]的實測結果,研究PCAS 在崩塌碎屑流顆粒分析的應用,以及閾值、孔喉封閉半徑和最小孔隙面積的參數選取。
2.1 研究區概況
彭雙麒等[2]通過傳統粒徑統計方法,沿納雍崩塌中部區域的主滑方向,將堆積區分為A1—A13 共13個區,每個區長100 m、寬50 m(圖3)。通過生成地表數字模型(DSM),人工觀測統計,得出每個區域顆粒粒徑及對應數量。為了方便測量,粒徑設定為顆粒對角線最大長度取值。
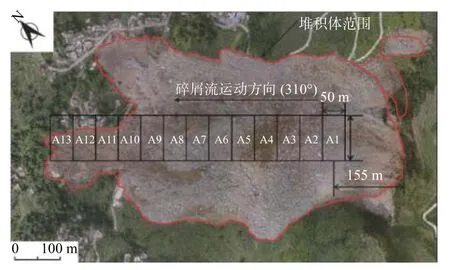
圖3 崩塌堆積分區示意圖[2]Fig.3 Partition diagram of the collapse accumulation body[2]
分別統計出每個區域0~1 m、1~2 m、2~3 m、3~4 m、4~5 m、5~6 m、6~7 m、7~8 m、8~9 m、9~10 m、10~17 m的粒徑數量(識別最大粒徑16.6 m),取值區間左開右閉。根據統計結果,繪制成累計級配曲線(圖4),縱軸為小于某粒徑顆粒的數量百分比,橫軸為各粒徑。
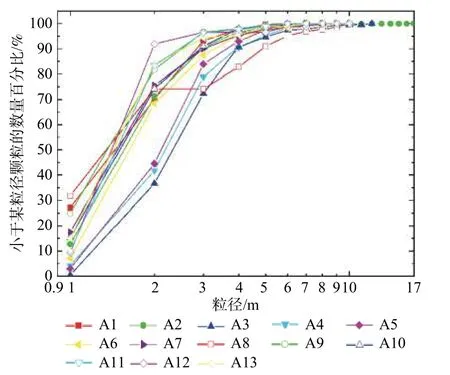
圖4 分區顆粒粒徑累計曲線[2]Fig.4 Aggregate curve of particle size in subsection[2]
為了更直觀顯示A1—A13 每個統計區域內大粒徑與小粒徑含量之間的關系,分別作出各區域0~2 m、2~4 m、4~6 m、大于6 m顆粒所占比例柱狀圖(圖5)。
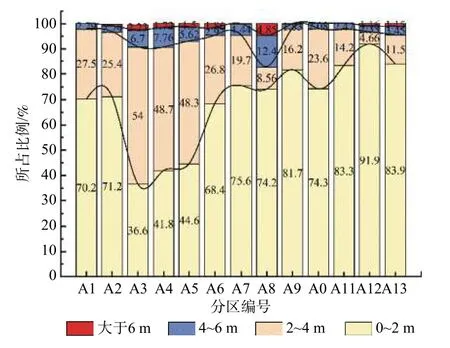
圖5 各區域不同粒徑等級所占比例Fig.5 Proportion of different grain sizes in different regions
2.2 PCAS 參數討論
運用PCAS 對每個區域顆粒進行定量分析。不斷調整閾值、孔喉封閉半徑、最小孔隙面積,分別統計不同參數下對應的顆粒分布情況,找到合適的參數取值,分析不同參數條件下對研究結果的影響,驗證PCAS 軟件的準確性。
(1)PCAS 參數選取
導入圖像,不斷調整閾值,對13個區域用PCAS軟件進行二值化處理。通過實際分析本次納雍普灑村崩塌的圖像數據,得出閾值在170時可以清晰地區分出顆粒與孔隙(圖6)。
探究孔喉封閉半徑(r)、最小孔隙面積(S0)的取值對PCAS顆粒識別的影響。不斷調整孔喉封閉半徑、最小孔隙面積合適的取值,并進行相應的組合。如圖7所示,當r/S0=0.5/5(這里為像素,通過與實際半徑、面積換算,r/S0=0.5/5=0.05 m/0.05 m2,即r單位為0.1 m,S0單位為0.01 m2)時,許多雜點及不需要的微小顆粒被識別,且顆粒與顆粒間不能有效分隔開;當r/S0=4/40時,較大顆粒也小于最小孔隙面積,不能識別出來;對比圖2(c),當r/S0=1/10時,識別所得顆粒分布結果更能反映堆積物顆粒各粒徑分布情況。因此,選取孔喉封閉半徑r為1,2,3(單位為0.1 m,下同),最小孔隙面積S0為10,20,30,40(單位為0.01 m2,下同),互相組合(表1),找到合適的參數取值(各參數均以像素為單位)。
(2)PCAS 粒徑統計結果
圖6 PCAS 在不同閾值下的二值化結果Fig.6 Binarization results of PCAS at different thresholds
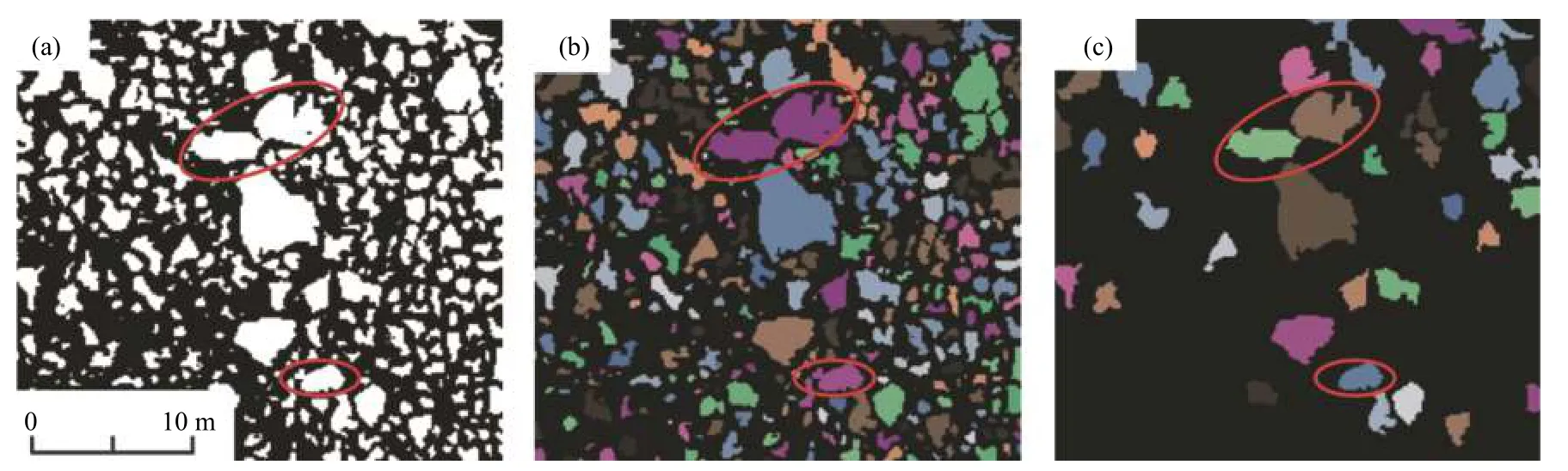
圖7 PCAS 在r/S0=0.5/5 與r/S0=4/40時的顆粒識別結果Fig.7 PCAS particle recognition results at r/S0=0.5/5 and r/S0=4/40
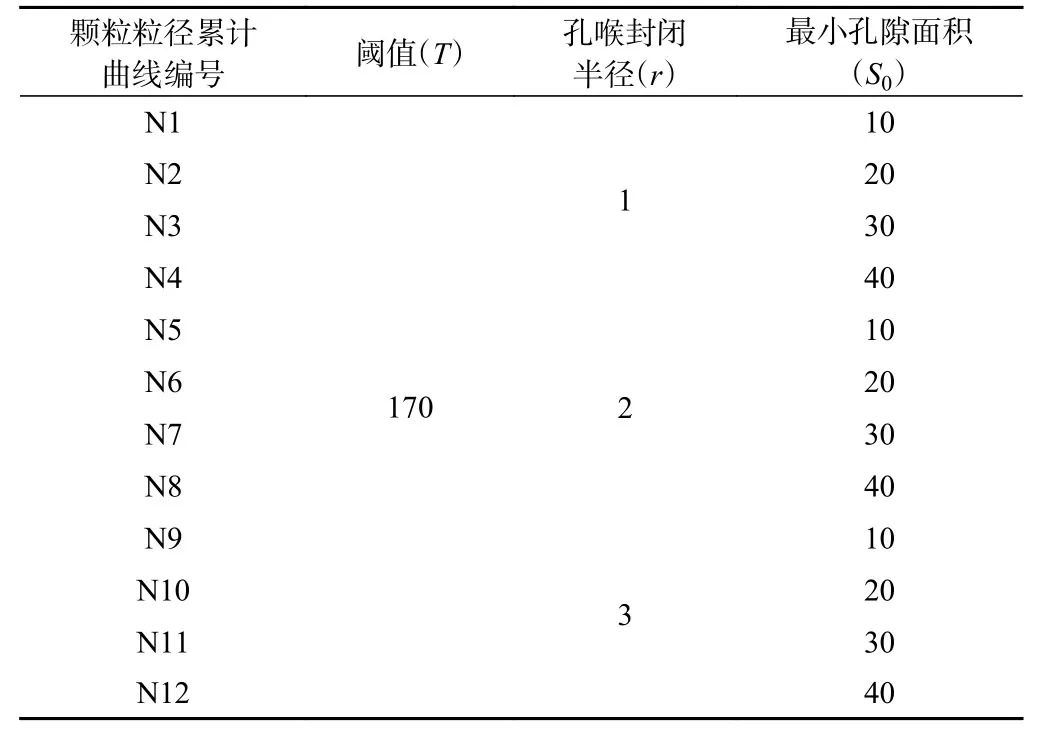
表1 三個參數的組合情況Table1 Combinations of the three parameters
由各個圖像中顆粒的幾何形態數據,統計出每個區域長軸在0~1 m、1~2 m、2~3 m、3~4 m、4~5 m、5~6 m、6~7 m、7~8 m、8~9 m、9~10 m、>10 m的粒徑數量(識別最大粒徑11.8 m),取值區間為左開右閉,繪制出顆粒粒徑累計曲線。并分別作出各區0~2 m、2~4 m、4~6 m、>6 m 粒徑所占比例柱狀圖。注意,PCAS 識別的是像素大小,每個區域圖片像素為465×976,而實際尺寸為50 m ×100 m,由式(1)和式(2)換算,為方便統計,取1 像素等于0.1 m。
分別根據表1中的參數組合繪制顆粒粒徑累曲線(圖8)和各區域不同粒徑等級所占比例柱狀圖(圖9),圖9中粒徑百分比小于1%時沒有標記。
由圖8可知:
(1)A11、A12、A13 圖像中粒徑小于2 m的百分含量明顯高于其他區域,說明運動距離越遠,顆粒碰撞破碎越充分,小顆粒含量比重越大,分選越好。在閾值為170,孔喉封閉半徑為2時,A1 圖像中粒徑小于2 m的百分含量也明顯高于其他區域,曲線較陡,顆粒粒徑級配差于其他區域。
(2)當孔喉封閉半徑為1,2時,隨著最小孔隙面積的變大,顆粒粒徑小于2 m的百分比明顯下降,但總的趨勢不變;表明PCAS 在最小孔隙面積增大時,能去除較大的雜點,區分出有效顆粒,總的百分比就降低。但當孔喉封閉半徑為3時,隨著孔隙面積的變大,大粒徑百分比無明顯變化,小顆粒粒徑百分比變小,小于1 m的粒徑百分比大多在10%以下(除A11、A12、A13);這表明當孔喉封閉半徑增加到一定程度時,許多顆粒被進一步分割成更微小顆粒,當最小孔隙面積較小時(這里為10),大量微細顆粒就被當作雜點去除,此時即使最小孔隙面積變大,粒徑百分比也無明顯變化。
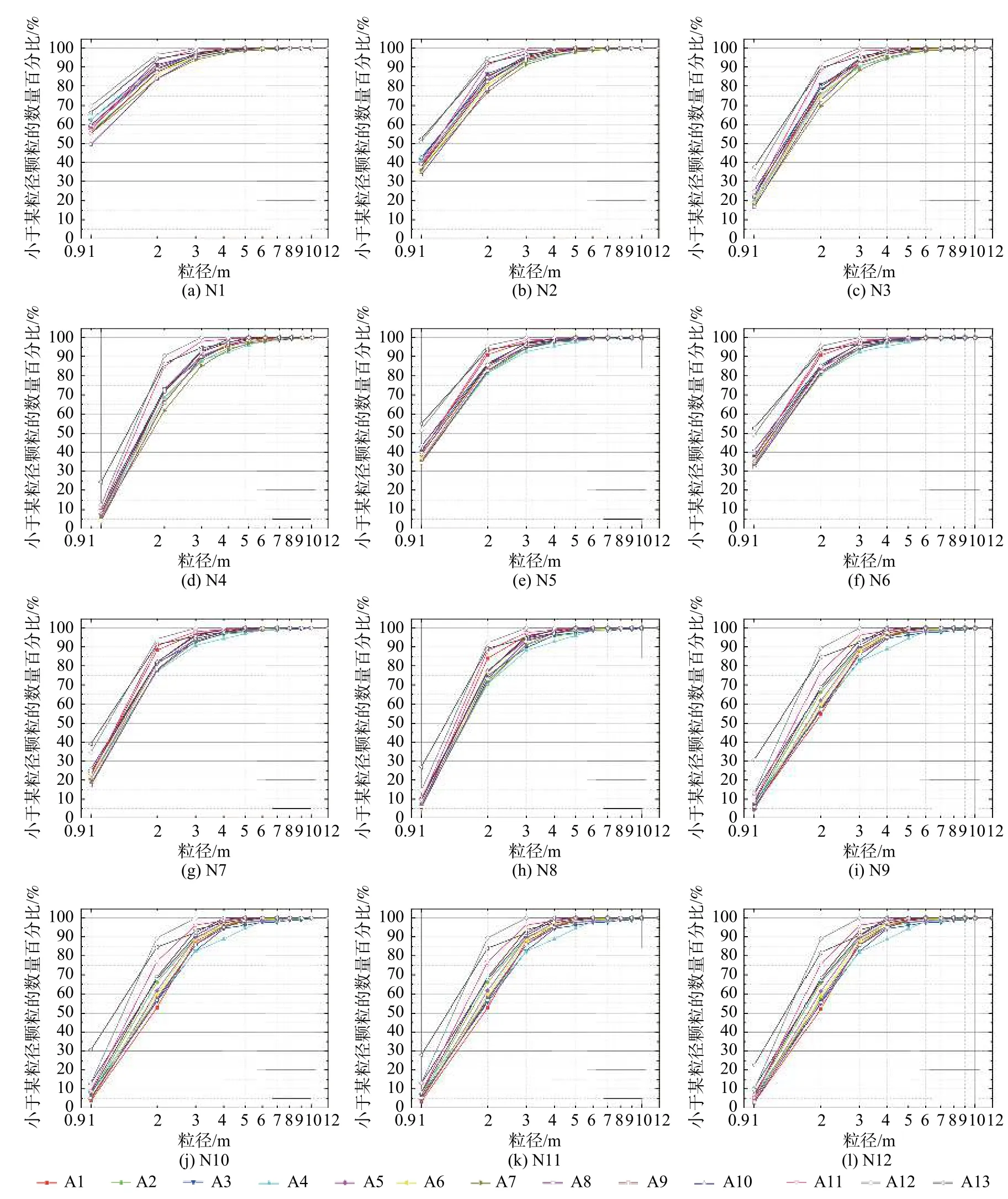
圖8 不同參數取值下各區域顆粒粒徑累計曲線Fig.8 Accumulation curve of particle size in each region under different parameters
(3)以N2、N6、N10為例,當最小孔隙面積一定時,隨著孔喉封閉半徑的增大,顆粒粒徑小于2 m的百分比明顯下降,且級配變差。N10 條件下,每個區域粒徑小于2 m的百分比分布在50%~90%,而N2、N6 小于2 m的百分比則在80%~95%;這表明隨著孔喉封閉半徑增大,形狀不規則的大顆粒被腐蝕,分割為小顆粒,當小于最小孔隙面積時,被作為雜點去除,所占比重減小。
(4)小于3 m的顆粒百分比在每個區域的占比都在80%以上,而圖4小于3 m的為70%以上,說明PCAS 相比人工計數,顆粒計數更精細,識別更完整,但總的效果相差不大,粒徑級配曲線與實際情況相符,驗證了PCAS 在碎屑流堆積物顆粒識別上的可靠性。
由圖9可知:
(1)由圖N1、N2、N5、N6可得,當孔喉封閉半徑為1,2,最小孔隙面積為10,20時,各區域0~2 m 小顆粒所占百分比都在80%以上,大于4 m顆粒所占百分比都在4%以內;表明當孔喉封閉半徑與最小孔隙面積較小時,各區域較多的小顆粒與雜點被識別,且不能被錯誤識別為單個顆粒。對比N3、N4、N7、N8,當孔喉封閉半徑或最小孔隙面積增大時,0~2 m 小顆粒占比降低,大于4 m的大顆粒比重增加。
(2)由圖N9、N10、N11、N12可得,當孔喉封閉半徑為3時,各區域小于2 m的顆粒占比都具有先減小后增大的趨勢,拐點在A3區;有3個明顯波峰,極點在A2、A9、A12區,有三個明顯波谷,極點在A3、A8、A10區。各區域4~6 m顆粒占比都在2%~4%附近,小于6 m的顆粒占比具有2個波谷,極點在A4 與A8區。各粒徑占比分布情況與圖5對比,基本吻合,接近真實值。
(3)對比圖N9、N10、N11、N12 與圖5,大于6 m顆粒占比在A3、A4、A5 三個區域與實際情況相符。圖5中,0~2 m顆粒占比在A3、A4、A5區呈現波谷形態,但在PCAS 粒徑識別占比中,A1~A10區0~2 m顆粒占比都在52%~69%,表明在PCAS顆粒識別系統中,小粒徑顆粒識別效率高,各區占比較接近。
2.3 PCAS 優劣及可行性討論
根據PCAS 在閾值為170、孔喉封閉半徑為3、最小孔隙面積為30 三個參數下取得的各區粒徑分布結果,結合人工統計數據,作各區粒徑塊數對比柱狀圖(圖10)。結合圖8、圖9可得如下結果:
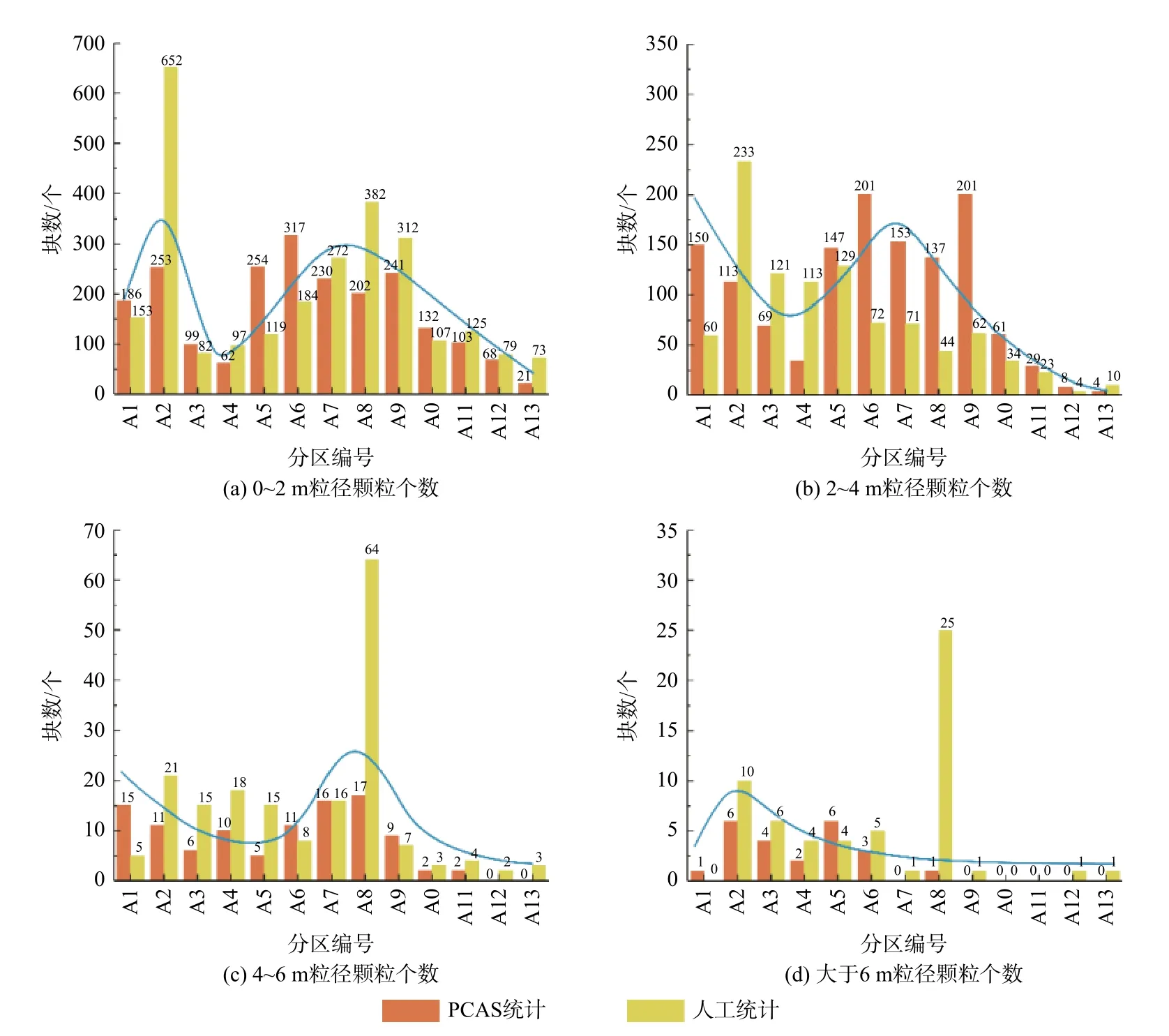
圖10 PCAS 統計方法在T/r/S0=170/3/30時與人工統計各區顆粒塊數對比圖Fig.10 Comparison chart of the PCAS statistical method at T/r/S0=170/3/30 and artificial statistics
2.3.1 優勢
(1) 高效性:PCAS 統計的細顆粒數量相比人工統計的多,但顆粒數量變化趨勢基本一致,各區數量變化情況基本對應;0~2 m 粒徑塊數在A2、A4、A7 附近出現極值,2~4 m 粒徑數量在A4、A7 附近出現極值。表明PCAS可以有效識別肉眼難以計數的細小顆粒,可以極大提高對小粒徑顆粒(小于4 m)的識別效率,相比人工細小顆粒統計更高效。
(2) 準確性:當顆粒粒徑大于4 m時,人工統計與PCAS 統計結果基本吻合(A8區異常)。人工對大顆粒的識別相比小顆粒準確性較高,這也證實了PCAS對堆積體識別的準確性,人工可以識別的,PCAS 也能自動準確識別。
(3) 規律性:從各區顆粒數量變化趨勢可以看出,PCAS 統計顆粒數量變化呈相當好的規律,曲線圓潤平滑,“波峰波谷”的數量極值與貴州納雍等碎屑流崩塌實際情況對應較好[17-18],且符合碎屑流堆積體的一般規律[19]。而人工統計由于肉眼的局限性,在顆粒數量、顆粒大小上總會存在判斷失誤,與實際情況會有一定的差異。
(4)可操作性:PCAS顆粒識別系統操作簡單,只需設定閾值(T)、孔喉封閉半徑(r)、最小孔隙面積
(S0)三個參數,即可得到堆積體顆粒分布情況,可節省大量人力物力。
2.3.2 劣勢
PCAS 劣勢主要體現在三個參數自身的特性上,分析如下:
(1)A2、A8區顆粒數量出現奇點;圖10(a)、(b)中,A2區人工統計粒徑小于4 m顆粒數量比PCAS 計數高,主要是因為當顆粒小于PCAS 設置的最小孔隙面積時,就被自動刪除,導致A2區粒徑小于4 m的顆粒數量較低;圖10(c)、(d)中,A8區人工統計粒徑4 m以上顆粒數量較高,主要是因為PCAS 設置的孔喉封閉半徑過大,許多形狀不規則的大顆粒被錯誤分割成多個小顆粒,導致大顆粒數量變少,并且這些誤分割成的小顆粒一部分大于最小孔隙面積,被識別成單個顆粒,導致A8區2~4 m 粒徑顆粒數量較人工統計的多。
(2)PCAS 圖像二值化,是根據圖像中孔隙與顆粒的灰度值不同加以區分的,主要取決于所得堆積體圖像。如果堆積體圖像的分辨率、對比度、飽和度以及拍攝角度等不同時,選取的閾值可能會有差異,圖像二值化結果也可能不同。
2.3.3 可行性
(1) 綜合圖8~10,當PCAS顆粒識別系統中采用不同的參數取值時,對分析崩塌碎屑流顆粒分布情況會有一定的影響。當所得圖像與本文納雍崩塌圖像相似,閾值170、孔喉封閉半徑3、最小孔隙面積30為最優參數選擇,各區不同粒徑數量與人工統計所得結果基本對應,粒徑累計曲線與各區域不同粒徑等級所占比例最接近實際情況;反之,可根據本文所介紹的PCAS 識別方法、步驟以及參數選取的判定依據,依據具體情況以“170、3、30”為基準進行合理的參數調整。
(2) PCAS顆粒識別系統已在貴州納雍崩塌[10]和金沙江白格滑坡[11]中得到應用,并且效果顯著。得到滑坡堆積體圖像后,只需設定三個參數,即可對堆積體進行顆粒識別分析,操作簡單,并且PCAS 具有手動編輯的功能,可以通過界面的“Edit binary image”功能,根據實際情況進行顆粒的調整。在新技術不斷發展的今天,PCAS 不失為崩塌碎屑流粒徑研究的一個高效、可行的途徑,具有應用價值。
3 結論
(1)PCAS 能自動準確地識別碎屑流堆積物顆粒與孔隙,具有高效、準確、可操作性強等特點,可用于堆積物顆粒數字圖像的識別、量化、分析;確定三個關鍵參數:閾值(T)、孔喉封閉半徑(r)、最小孔隙面積(S0)的合適取值后,即可得出粒徑分布情況,節省大量人力物力。
(2)針對顆粒粒徑較大、二值化后孔隙與顆粒區分不明顯、噪點較多的圖像,采用較大的r/S0值更能反應顆粒分布宏觀情況;反之,宜適當減小r/S0進行分析。當所得圖像與本文納雍崩塌圖像相似,閾值170、孔喉封閉半徑3、最小孔隙面積30為最優的參數選擇,可得到有效的碎屑流顆粒分布情況;反之,可以“170、3、30”為基準進行合理的參數調整。
(3)PCAS 具有較高的可行性,所得貴州納雍崩塌堆積物粒徑識別和統計結果與實測值接近,粒徑占比、分布規律基本吻合,即堆積體小粒徑占比較多,0~2 m顆粒粒徑各區占比都在50%以上,且運動距離越遠小粒徑比例越大,各區“波峰波谷”變化趨勢基本對應。