基于單片機的電磁四輪循跡及避障策略
2021-01-20 04:48:34趙士勛
物聯網技術 2021年1期
張 旭,高 琴,趙士勛
(防災科技學院,河北 三河 065201)
0 引 言
隨著科技的進步,工業生產正在向高度自動化方向靠攏。其中電磁導航技術由于其自身穩定性高,抗干擾能力強等因素成為工業運輸研究的重點。
基于此,本文設計了一種電磁四輪的穩定循跡且躲避道路障礙的方案。實驗中在小車上安裝5路電磁傳感器感知道路信息;使用運算放大電路將獲得的信號進行放大便于數據處理;使用夏普公司出品的激光測距傳感器作為路障標志檢測傳感器;使用大賽統一規定的恩智浦32位處理器進行數據處理。最后探索出使用舵機轉向和后輪差速相結合的轉向策略,舵機根據單片機處理道路元素得到的數據進行打角,后輪進行差速處理使小車穩定應對彎道等,得到一套可以使小車穩定繞過路障的方案。
1 道路元素分析[1]
實驗道路上鋪設有中心電磁引導線,導線通過的交變電流為100 mA/20 kHz。交變電流產生的磁場在經過電感轉變成微弱的電信號,由運算放大器進行放大,最后數據傳輸到單片機進行處理,達到循跡的目的。道路有彎道、十字路、坡道、環島、及橫斷路障等橫斷路障等元素。其中橫斷路障是寬高為20 cm,長度與道路等寬的立方體。車模遇到橫斷路障可以在距離1 m的范圍內駛出道路,繞過橫斷路障后在距離路障1 m之內返回道路。圓環部分需要小車繞行一周后繼續前行。
2 小車結構分析
2.1 整體結構
本文使用的車模采用四輪結構,后輪由2個直流電機提供動力,前輪由舵機提供轉向動力,用拉桿連接小車前2個輪子達到轉向的目的。電感傳感器和距離傳感器位于小車前部自主設計的支架上,可以適當加長支架,在使小車運行速度更快的同時使小車的運行更穩定。同時小車安裝了一個陀螺儀和加速度傳感器用于記錄小車姿態。2個512線尼龍編碼器用齒輪與電機相連,可測量小車的速度。
2.2 傳感器排布
電感傳感器排布[2]如圖1所示,考慮到道路的復雜性,選擇使用兩個方向的電感排布,對道路有更好的適應性。橫置電感因為其敏感性強、穩定性高,被用于彎道、十字的循跡。豎直電感對于直道有屏蔽作用但是對圓環部分的感應更敏感,因此用于圓環部分的循跡。中間的橫置電感在圓環部分會感知2倍于普通道路的電感量,因此用于圓環的識別標志。距離傳感器安裝在小車最前方,可以具有避免誤觸的功能,同時使距離測算更加準確。

圖1 電磁傳感器排布方案
3 軟 件
3.1 元素判別
由靜磁學中的比奧-薩伐爾定律可知,隨著距離電磁線距離的增加磁感應強度會減小。把每個電感連續取得的5個值進行排序,去掉最大值和最小值之后求和取平均值進行中值濾波,可使獲得的數據更可靠。根據不同的電感值可以判別出道路的直道、彎道、十字等元素。圓環部分的判定使用位于中間的橫置電感,當中間電感值增大至約為直道的2倍時可以判定是圓環;當距離傳感器檢測到距前方障礙物小于一定值時可以判定前方是路障。控制結構如圖2所示。
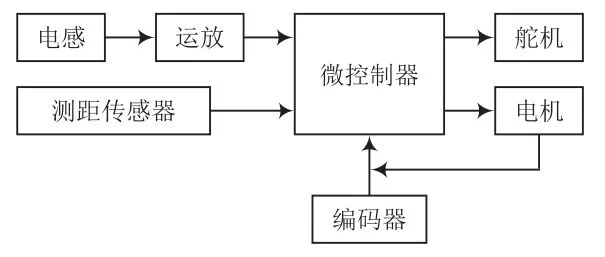
圖2 控制結構
3.2 控制算法
PID因其結構簡單、穩定性好、工作可靠、便于調試等原因成為智能車控制的主要技術之一,所以本文采用PID來分別控制舵機和電機,這樣可以使小車快速穩定運行,并在不同的賽道元素中實現速度變化,公式如下:

(1)方向PD閉環控制。電感采集到道路信息經過單片機濾波、歸一化處理之后,得到的值與小車相對于道路中線的偏差成正比,且正負值和小車偏離的方向相關。根據實際情況給舵機進行限幅處理防止舵機燒壞。控制算法中的P、D需要大量的實際調試數據來確定。選取合適的值可以使智能車的運行更穩定。
(2)速度積分分離PI閉環控制。由于智能車在不同的賽道元素上所需要的速度不同,積分I對車速的影響較大。所以我們使用了積分分離PID控制算法。控制算法的離散化公式為[3-4]:

當被控量與設定值偏差較大時,可取消積分作用;當被控量接近給定值時引入積分控制,可消除靜態誤差,提高精度。小車2個后輪使用2個512線編碼器進行測速。這個方法可以避免因為道路元素而引起的速度超調,使小車運行更穩定。
3.3 控制策略
小車在轉彎時內外兩側車輪會移動不同的曲線距離,外側車輪移過的距離大于內側車輪。此時如果不對后輪進行差速處理會出現車輪拖滑的現象,這對于判定小車的速度和位置有很大的影響,所以實驗中選擇舵機轉向和后輪差速結合的方式進行轉向。根據舵機的轉向給小車轉向時的外輪加上補償,可以有效避免拖滑的現象,使小車對信息的判定更加準確,行駛速度更快。
3.4 特殊元素
3.4.1 圓環
圓環元素示意圖如圖3所示。小車在靠近圓環時中間電感值會增大,到切點處時會增加到最大值,約為直道的兩倍。這時便可以確定為圓環元素。確定為圓環之后2個豎直放置的電感因為圓環的電感線而導致磁感應強度增加。這時只需要關閉橫置電感,用豎直電感進行循跡即可。進入圓環之后選擇合適的時機關閉豎直電感,用橫置電感循跡小車就會轉出圓環繼續行駛。
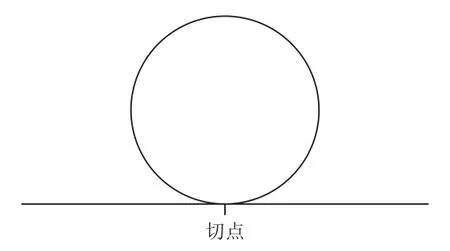
圖3 圓環示意圖
3.4.2 路障
路障元素示意圖如圖4所示。路障元素為本屆大賽新增元素。規則要求車模可以在路障前1 m駛出道路,繞過路障后在路障1 m之內返回道路。因此團隊探索出了一個使用陀螺儀輔助通過的方案。當距離傳感器檢測到路障之后,根據勾股定理可以大致計算出小車行駛到路障處的距離。使舵機向道路外打角,由陀螺儀積分得到轉向角度,并且同時由編碼器積分得到小車行駛的路程。當積分的角度可以通過時,舵機打角回正繼續積分角度使小車直行。直行至可以通過的距離之后,給舵機一個反方向的固定角向道路內行駛。當小車的2個橫置電感值增大到一定值時可以判定車模回到道路中,可以繼續循跡行駛。
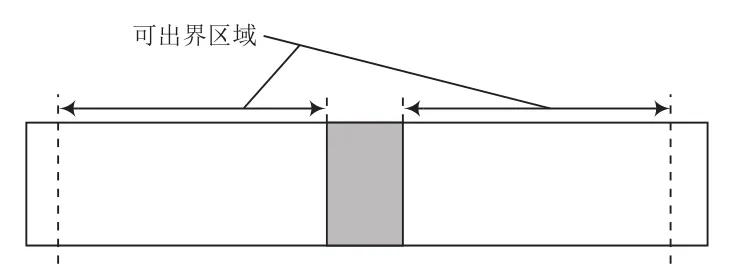
圖4 路障示意圖
4 結 語
目前,電磁四輪因成本低、穩定性高等優點已經廣泛應用于自動分揀機器人等領域,并且還有更多方面的應用待探索。本文對電磁四輪的循跡以及避障策略做了分析,使用電感及距離傳感器可以快速穩定的完成循跡功能。在控制策略方面,本文探索出的控制策略雖然已經可以滿足循跡的需求,但是還有更加穩定的模糊控制需要去探索。