基于激光點云的航測實驗室三維重建
2021-01-19 02:03:26梅曉丹劉瀚文蘇冬玲李湘媛
黑龍江工程學(xué)院學(xué)報 2021年1期
梅曉丹,李 響,劉瀚文,蘇冬玲,李湘媛,李 剛
(黑龍江工程學(xué)院 測繪工程學(xué)院,黑龍江 哈爾濱 150050)
隨著三維建模點云數(shù)據(jù)獲取手段的逐漸成熟,地面激光掃描技術(shù)作為1種通過三維掃描的方法獲取掃描對象表面信息的三維測量技術(shù),以線陣采樣的方式獲得掃描視界內(nèi)地物的全景數(shù)據(jù),從而使虛擬地理場景的重建模型能夠真實模擬自然地理環(huán)境和地物的幾何結(jié)構(gòu)和形態(tài)分布,因而其在數(shù)字城市、文物保護(hù)、形變監(jiān)測以及建筑物三維重建等領(lǐng)域已成為業(yè)界研究的熱點[1-7]。本文以黑龍江工程學(xué)院的攝影測量與遙感仿真模擬實驗室為研究對象,該實景由建筑和辦公設(shè)施、地面沙盤和高架航空模擬軌道等專業(yè)設(shè)施組成。采用地基三維激光掃描方式獲取點云數(shù)據(jù),通過激光點云數(shù)據(jù)處理軟件和三維建模軟件,實現(xiàn)實驗室室內(nèi)實景的三維重建。
1 基于激光點云的航測實驗室三維重建總體方案
軟件環(huán)境主要包括點云數(shù)據(jù)處理、分析軟件以及三維建模軟件。本研究使用地面三維激光掃描儀進(jìn)行實驗室實景的點云數(shù)據(jù)采集,采用LiDAR360V4.0軟件和Autodesk ReCap2019軟件進(jìn)行點云數(shù)據(jù)處理。LiDAR360是北京數(shù)字綠土科技有限公司自主研發(fā)的激光雷達(dá)點云數(shù)據(jù)處理和分析軟件,支持海量點云的可視化及編輯、自動/半自動分類、數(shù)字模型生成及編輯等一系列操作,以及多元數(shù)據(jù)格式導(dǎo)出;AutoCAD Autodesk ReCap是1個獨立的應(yīng)用程序,通過引用多個索引的掃描文件(RCS)來創(chuàng)建1個點云投影文件(RCP),支持多種點云數(shù)據(jù)格式。采用3ds Max軟件進(jìn)行實驗室場景的三維重建,使用Photoshop軟件進(jìn)行三維模型貼圖操作。3ds Max 2019是Autodesk公司開發(fā)的三維動畫渲染和制作軟件。借助多種工具的組合可在短時間內(nèi)高效地創(chuàng)建三維模型和虛擬現(xiàn)實對象,還可生成專業(yè)高品質(zhì)的三維動畫,支持多平臺的軟件發(fā)布。本研究的具體技術(shù)路線如圖1所示。
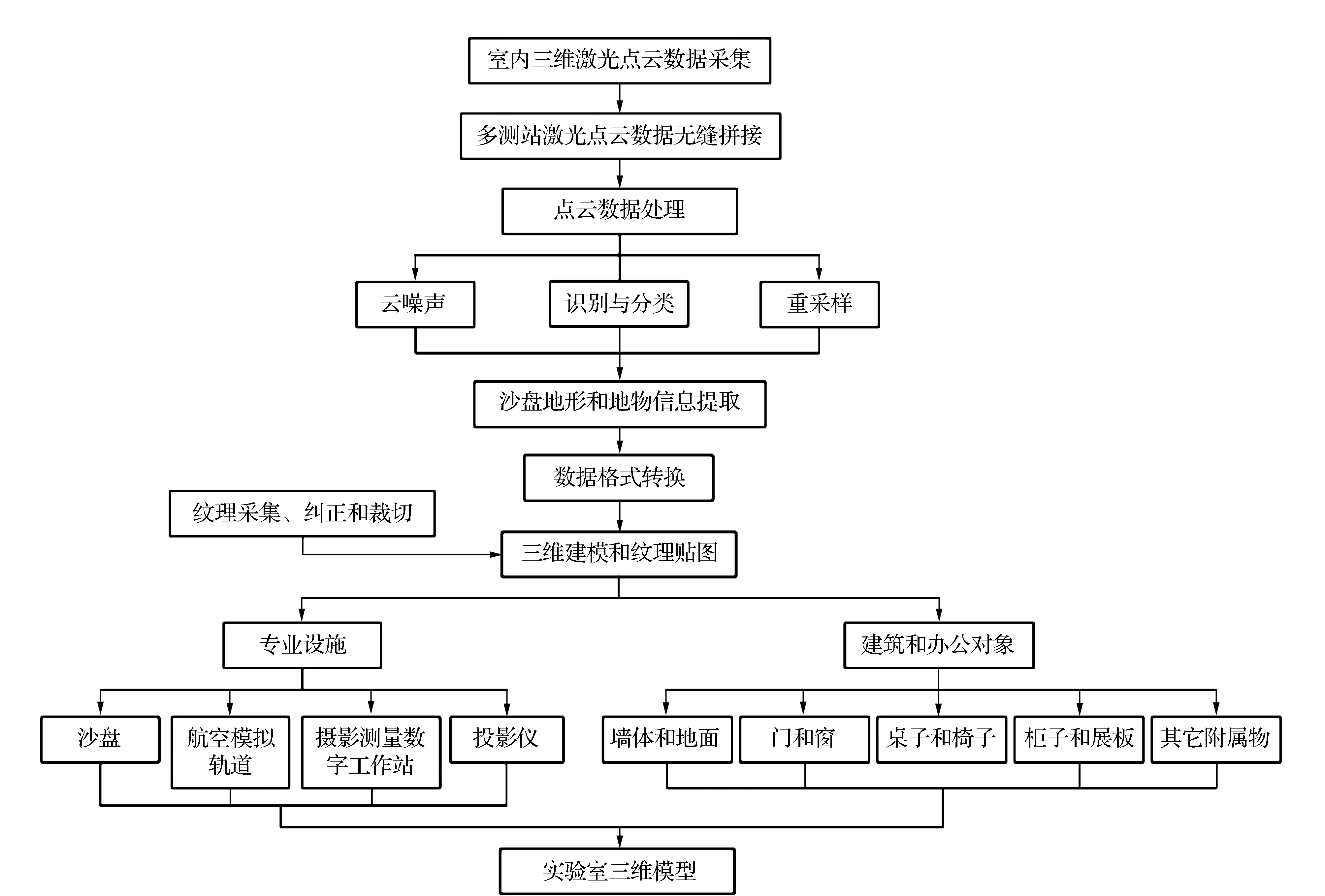
圖1 技術(shù)路線
2 激光點云數(shù)據(jù)的獲取和處理
2.1 數(shù)據(jù)獲取
以黑龍江工程學(xué)院的攝影測量與遙感仿真模擬實驗室為研究對象,本研究的數(shù)據(jù)獲取類型主要包括基于地面三維激光點云數(shù)據(jù)和室內(nèi)場景的紋理數(shù)據(jù)。使用Z+F IMAGER?5010X三維激光掃描儀,該儀器具體參數(shù)指標(biāo)見表1。設(shè)置測站高度為相對高程1 m,采用標(biāo)靶方法獲取點云數(shù)據(jù),在實驗室內(nèi)東、西、南和北4個方位分別擺放標(biāo)靶作為各測站點云數(shù)據(jù)拼接的公共參考點。通過轉(zhuǎn)換激光雷達(dá)所獲取的掃描文件為點云格式,保存為LAS格式。由于該三維激光掃描儀無法同時獲取掃描對象的紋理數(shù)據(jù),因此,本研究采用相機單獨拍攝獲取的方法,共采集貼圖270余張,保存為.jpg格式。
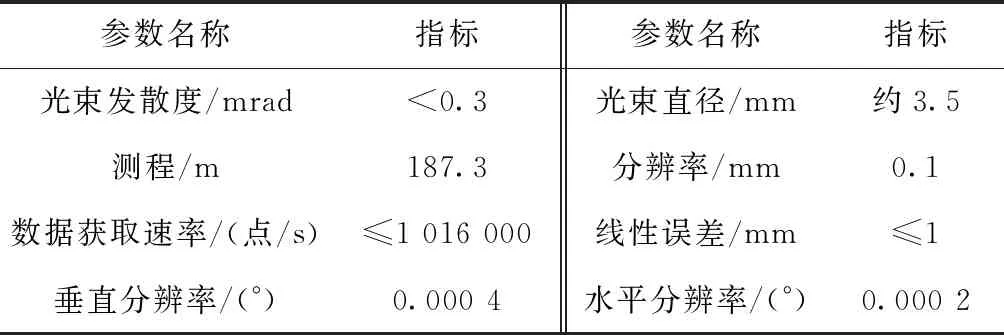
表1 Z+F IMAGER?5010X三維激光掃描儀參數(shù)
2.2 數(shù)據(jù)的處理
本研究采用LiDAR360軟件進(jìn)行點云數(shù)據(jù)處理,主要包括去噪聲、重采樣、識別與分類、地形信息提取和格式轉(zhuǎn)換等一系列操作,從而為后續(xù)的實體三維模型提供高精度高質(zhì)量的數(shù)據(jù)支持[8]。為了提高點云數(shù)據(jù)的處理效率和精度,將多個點云掃描文件聚合到一起,作為1個整體處理使得多個點云掃描數(shù)據(jù)具有相同的處理精度,保存在1個工程文件中,文件格式為.LiData。1)去噪聲:這里使用點云的【去噪】工具,將鄰域點個數(shù)設(shè)置為40,標(biāo)準(zhǔn)差倍數(shù)設(shè)置為5,去噪聲處理,同時精簡冗余數(shù)據(jù),提高數(shù)據(jù)質(zhì)量[9-10];2)重采樣:選擇【重采樣】工具,采用“最小點間距”方法,最小點間距設(shè)置為0.001,將點云數(shù)據(jù)進(jìn)行重采樣,以達(dá)到提高三維建模效率的目的;3)識別與分類:使用【分類】工具,分別通過地面點分類、孤立點分類、噪聲點分類、建筑物分類和電力線分類等對沙盤中地物和地形信息進(jìn)行識別和分類處理;4)地形信息提取:使用【地形】工具,通過坡度、坡向、生成TIN和點云生成等高線等工具進(jìn)行點云數(shù)據(jù)中地形信息的提取,特別是通過【點云生成等高線】工具生成的沙盤地形等高線,為后續(xù)的三維地形建模提供數(shù)據(jù)支持;5)數(shù)據(jù)格式轉(zhuǎn)換:采用Autodesk ReCap軟件將當(dāng)前所加載的點云掃描數(shù)據(jù)作為點云掃描RCS文件保存及導(dǎo)出,將LAS格式轉(zhuǎn)換為3ds Max所支持的RCS文件格式和RCP文件格式。
3 實驗室模型構(gòu)建
攝影測量與遙感模擬仿真實驗室主要包括沙盤、航空模擬軌道、攝影測量數(shù)字工作站、投影儀、門、窗戶、柜子、吊燈、桌子、椅子及其它環(huán)境附屬物(墻體、地面、展板、洗手臺和暖氣片等)。在點云數(shù)據(jù)處理的基礎(chǔ)上,采用3ds Max軟件進(jìn)行實驗室對象和場景的三維重建,并通過大量紋理貼圖,達(dá)到實景建模逼真的效果。
3.1 三維地物對象構(gòu)建
3.1.1 三維沙盤模型
由于本研究沙盤對象中地物和地形相對復(fù)雜,采用1∶500和1∶1 000兩種比例尺展示,其主要包括道路、樹木、建筑物和地形等,高度為0.2 m,長為6 m,寬為5 m。這里先將實驗室中的沙盤對象分別進(jìn)行單體三維建模,再將各個模型集成整合處理為1個整體沙盤模型。1)道路模型:采用中線生成法,即通過繪制道路中間樣條線的方法完成道路模型構(gòu)建。在道路中線彎曲路段處理,使用【圓角】工具修改其屬性值,使道路中線變得圓滑。道路交叉口的創(chuàng)建方法為繪制交叉的2條樣條線,采用【附加】工具將其合并為1個整體。由于沙盤所包含的道路都是相同的道路,只有個別道路需要單獨處理,其他道路均可采用【實例】克隆工具,然后進(jìn)行相應(yīng)的空間三維處理,從而達(dá)到與沙盤道路位置吻合,可以很大程度上提高三維建模的效率。根據(jù)沙盤點云掃描數(shù)據(jù)繪制道路中線輔助線網(wǎng)圖,再由道路生成復(fù)雜的道路網(wǎng);2)樹木對象:在創(chuàng)建的道路網(wǎng)模型基礎(chǔ)上,創(chuàng)建道路兩側(cè)的樹木對象。使用【植物】工具進(jìn)行樹木模型的創(chuàng)建,選擇樹種,使用點云捕捉工具和相應(yīng)的三維位置變換工具,完成樹木模型的空間位置擺放;3)建筑物對象:沙盤中校區(qū)的建筑物進(jìn)行三維建模時,主體建筑物多為規(guī)則形狀,使用【長方體】工具創(chuàng)建建筑物標(biāo)準(zhǔn)幾何體,通過擠出、拉伸、圓滑和布爾等工具修改外部形態(tài)。采用材質(zhì)編輯器進(jìn)行建筑物的貼圖和紋理處理,再調(diào)整建筑物三維模型進(jìn)行幾何位置擺放。對于特殊形狀的建筑物,則使用【復(fù)合對象】工具進(jìn)行建筑物部件組合操作。由于沙盤中建筑物尺寸較小,其貼圖的現(xiàn)場采集比較困難,本研究采用獲取室外實景校園建筑物紋理貼圖方法,用于沙盤建筑模型的貼圖,以達(dá)到模型的美觀性和實景效果;4)三維地形構(gòu)建:加載等高線數(shù)據(jù),選中等高線整體,通過【地形】工具生成三維地形模型,獲取高精度高分辨率的數(shù)字地形模型;5)三維沙盤構(gòu)建:將沙盤內(nèi)的所有地物和地形的三維建模導(dǎo)入合并,并嚴(yán)格按照點云數(shù)據(jù)對各種地物和地形進(jìn)行X,Y和Z軸坐標(biāo)的參數(shù)設(shè)置,使沙盤模型達(dá)到最佳整體集成效果。采用歸一化工具處理過程對于每一個點的高程值Z減去找到的最近地面點高程值,去除地形起伏對點云數(shù)據(jù)高程值的影響,再將三維沙盤模型與室內(nèi)模擬拍攝航片無縫拼接圖疊加構(gòu)建三維實景沙盤模型,如圖2所示。
3.1.2 三維航空模擬軌道和無人機模型
采用3ds Max軟件構(gòu)建實驗室室內(nèi)的模擬航空飛行軌道,主要包括固定軌道和滑動軌道,相對航高為3 m,長度為6.3 m,寬度為5.6 m,設(shè)置4條航線,航向重疊度為60%,旁向重疊度為30%。另外,在滑動軌道上,以四旋翼無人機為原型,由飛行器、旋翼和支架組成三維無人機模型。
3.1.3 三維攝影測量數(shù)字工作站模型
以JX-4G數(shù)字?jǐn)z影測量工作站為原型,主要由顯示器、機箱、電腦桌、手輪和腳盤等部件組成,采用3ds Max軟件構(gòu)建三維數(shù)字?jǐn)z影測量工作站模型。

圖2 沙盤模型

圖3 三維實驗室整體模型
3.2 室內(nèi)建筑和辦公設(shè)備三維建模
對于實驗室的投影儀,門、窗戶、柜子、吊燈、桌子、椅子及其它附屬物(墻體、地面、天花板、宣傳展板、洗手臺、暖氣片等)的三維建模方法與上述對象相似,這里就不再加以詳細(xì)說明。在完成3 ds Max軟件實驗室各個對象模型和場景模型構(gòu)建的基礎(chǔ)上,依據(jù)實驗室對象的點云數(shù)據(jù)的幾何屬性和三維空間坐標(biāo)信息,調(diào)整各個模型的比例大小和空間位置,將各個模型進(jìn)行集成形成整個實驗室三維實景模型。
4 實驗室三維模型的應(yīng)用
在3ds Max軟件中使用【創(chuàng)建】工具,創(chuàng)建自定義攝影機,使用【設(shè)置關(guān)鍵點】工具調(diào)整攝影機的旋轉(zhuǎn)方向和運動路徑;當(dāng)攝影到達(dá)轉(zhuǎn)向節(jié)點時使用【鑰匙】工具,記錄攝影機在2個節(jié)點間運動的視場變化過程;使用【時間配置】工具設(shè)置攝影機漫游時間和幀數(shù)。從俯視、側(cè)視、前后視、遠(yuǎn)景和近景等多個角度,依次點擊設(shè)置關(guān)鍵點,按鑰匙圖標(biāo)記錄當(dāng)前位置,將磁頭滑到每間隔25幀位置,創(chuàng)建1 min的攝影機運動路徑,以達(dá)到全面地展示實驗室三維場景漫游效果的目的(見圖3和圖4)。秉持“虛實結(jié)合,資源共享”的實驗教學(xué)理念,開展基于實驗室三維模型的應(yīng)用,深度融合信息化技術(shù)與教育教學(xué),通過實驗室三維模型的漫游、人機交互和可量測性功能,搭建1個開放式的實驗平臺,服務(wù)于教學(xué)、實習(xí)以及實驗室的維護(hù),開創(chuàng)1種實驗教學(xué)的新模式。例如:在《三維GIS建模》、《攝影測量學(xué)》、《數(shù)字?jǐn)z影測量》和《航空與航天攝影》課程教學(xué)中,把教學(xué)從單純、抽象的理論和書本中抽離出來,變?yōu)橹庇^、立體和交互性;在《攝影測量外業(yè)實習(xí)》和《控制測量實習(xí)》中,模擬航空攝影測量的全過程以及地形測量的過程,將實習(xí)指導(dǎo)直觀分步演示,有效地攻破知識重點難點;在實驗室的維護(hù)中,通過計算機網(wǎng)絡(luò)系統(tǒng),師生將不受時空的限制,開展自主學(xué)習(xí)和創(chuàng)新研究,同時提供網(wǎng)絡(luò)一體化的管理功能,有效地提高了實驗教學(xué)的效果和質(zhì)量。
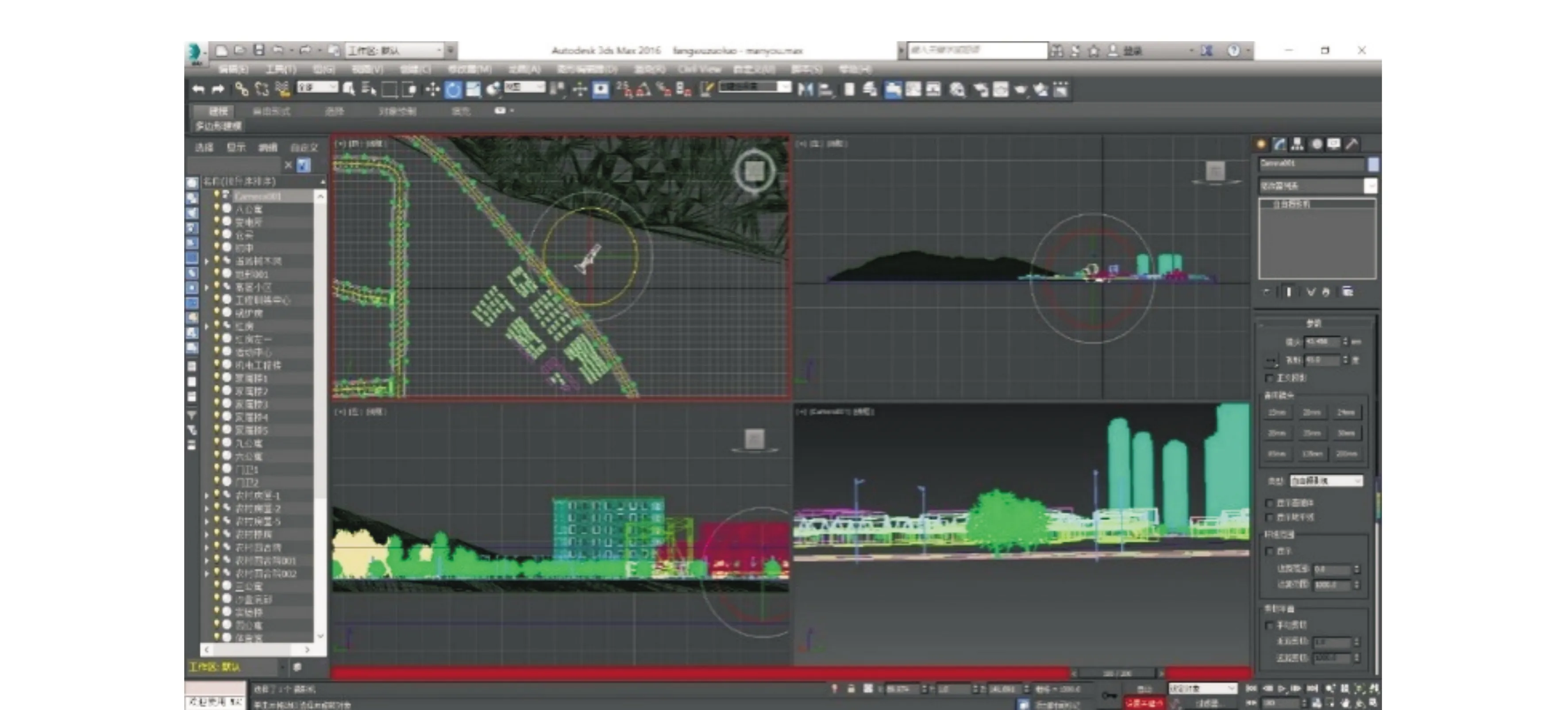
圖4 實驗室模型的攝影機設(shè)置
5 結(jié)束語
由于三維激光掃描儀高度對地面點云數(shù)據(jù)質(zhì)量的影響[12-13],實際實驗室沙盤中校園建筑物模型尺寸與實驗室整體空間大小比例存在較大差異。因此,僅單純利用三維激光點云信息是很難做出具有真實比例的精細(xì)模型,本研究采用傳統(tǒng)三維建模和點云模型自動構(gòu)建相結(jié)合的方式來實現(xiàn)實驗室室內(nèi)三維重建。基于地面三維激光點云數(shù)據(jù)構(gòu)建模型,獲得較好質(zhì)量的實驗室三維實景模型和三維漫游顯示效果,且其具有可量測的三維模型特點,利用該模型可為測繪類專業(yè)學(xué)生開展控制測量、地形測量、三維激光掃描和三維空間分析應(yīng)用等提供有效的數(shù)據(jù)支持,達(dá)到教學(xué)、示范和實驗實習(xí)的目的[14],但實際應(yīng)用中需要考慮沙盤地物和實物存在差異,如植被的反射強度。面對迅速發(fā)展的空間觀測技術(shù)和信息處理技術(shù),今后的工作將進(jìn)一步研究“天-空-地-內(nèi)”多源立體觀測方式,通過多種手段獲取室內(nèi)高精度三維空間信息,以期獲得更高精度和質(zhì)量的室內(nèi)實景三維模型。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
電子競技(2020年4期)2020-07-13 09:18:06
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
電子競技(2020年2期)2020-04-14 04:40:38
電子競技(2019年22期)2019-03-07 05:17:26
電子競技(2019年21期)2019-02-24 06:55:52
電子競技(2019年20期)2019-02-24 06:55:35
電子競技(2019年19期)2019-01-16 05:36:09
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19