無人機機載激光雷達提取果樹單木樹冠信息
2021-01-19 04:59:50陳日強李長春楊貴軍楊小冬朱耀輝張成健
農業(yè)工程學報 2020年22期
陳日強,李長春,楊貴軍,楊 浩※,徐 波,楊小冬,朱耀輝,3,雷 蕾,4,張成健,4,董 震,5
(1.河南理工大學測繪與國土信息工程學院,焦作 454000;2.農業(yè)農村部農業(yè)遙感機理與定量遙感重點實驗室,北京農業(yè)信息技術研究中心,北京 100097;3.北京林業(yè)大學信息學院,北京 100083;4.西安科技大學測繪科學與技術學院,西安 710054;5.山東科技大學測繪科學與工程學院,青島 266590)
0 引 言
果樹樹冠結構信息(如冠幅、樹冠面積和樹冠體積等)不僅反映著果樹的生長狀況和產量潛力,也是果園精準管理的重要依據,包括土壤灌溉施肥、枝條修剪、開花管理及病蟲防治等[1-4]。定株管理是未來果園精準生產管理的趨勢,而果樹單木樹冠信息的提取是果園定株管理的基礎。因此,果園單木樹冠結構信息的提取研究具有重大意義,將有利于果園的精準管理。
果園冠層結構信息提取是在果園單木水平上進行,所以單木樹冠檢測與提取是果園冠層結構信息提取的基礎。從遙感圖像中檢測和提取單個樹冠的半自動與自動算法,在及時、準確和高效率地提取樹冠信息方面,發(fā)揮著重要作用。目前,基于遙感數據,實現(xiàn)單木樹冠檢測與提取主要有2種思路,1)二維圖像分割:基于二維圖像所包含的形態(tài)、光譜、紋理等特征,依據計算機圖像處理技術對二維圖像進行區(qū)域分割。常用的圖像分割算法有控制分水嶺分割算法(Controlled Watershed Segmentation,CWS)[5-6]、反流域分割算法[7]、基于目標對象的圖像分析[8-9]等。基于數字表面模型(Digital Surface Model,DSM)或冠層高度模型(Canopy Height Model,CHM)進行單木分割是比較常見的方法[7,10]。Mu等[11]基于運動恢復結構算法(Structure From Motion,SFM)和多視角立體視覺技術(Multi-View Stereo,MVS)生成數字表面模型,利用自適應閾值控制的分水嶺分割方法成功識別桃樹個體。Yurtseven等[12]采用SFM技術對無人機圖像進行攝影測量處理,生成點云和DSM,結合基于對象的圖像分析技術,成功提取樹冠。Panagiotidis等[13]使用二維圖像成功構建樹林的三維結構,利用點云數據生成的冠層高度模型,結合反流域分割算法成功實現(xiàn)單木的檢測與分割。光譜和紋理等圖像特征往往不能真正地實現(xiàn)單木的檢測與分割,而是僅僅利用樹木樹冠與非樹冠的光譜、紋理等差異實現(xiàn)樹冠和非樹冠的二分類,所以光譜、紋理等信息常常用于樹木覆蓋度的計算[14-15]。Chen等[14]利用圖像顏色、紋理特征,建立支持向量機分類模型,實現(xiàn)孤立柑橘樹的精確檢測與分割。Tu等[15]利用無人機多光譜圖像的光譜、紋理信息測量了鱷梨園的樹木覆蓋度。2)三維點云分割:基于三維點云數據具有的空間結構關系,以及樹木所具有的真實三維特征,制定多種空間點云分類規(guī)則,直接針對點云數據進行單木檢測及樹冠分割。點云數據的獲取途徑有 2種:基于激光雷達技術直接獲取三維點云數據和基于重疊二維圖像的特征匹配,采用SFM實現(xiàn)三維結構的重建[16-17]。點云分割算法的核心就是點云的聚類問題,常用的分割算法有均值漂移算法[18-19]、區(qū)域生長法[20]、歸一化分割算法[21]等。Xiao等[18]詳細評價了均值漂移算法在針葉林和落葉林機載雷達數據分割中的應用,以及單木樹冠檢測對于分割的影響,認為均值漂移算法在樹木單層數據處理上是有效的。Sun等[22]利用無人機成像系統(tǒng)建立了果園三維點云模型,基于蘋果樹點云數據的概率密度實現(xiàn)果樹的快速檢測與分割。
三維點云最廣泛的數據來源是激光雷達數據,具有高分辨率的三維激光雷達數據有助于獲得大量難以從二維圖像提取的結構特征信息,如樹高、樹冠體積、枝條長度及分枝角度等[23-24]。在前人的研究中,使用激光雷達點云進行單木樹冠檢測與提取的研究對象多為針葉林或落葉松等[18,20-21],應用于果樹林的研究不多,基于激光點云提取果樹樹冠信息的可能性是未知的。盡管直接基于樹點云的單木檢測與分割算法有很多,但均存在點云數據量大,計算難度大,硬件要求高等問題,而且多種點云分割算法均存在問題,均值漂移算法的核形狀和權重參數針對不同的數據集有顯著差異[18];基于樹間距的區(qū)域增長法針對相似結構的混合針葉林個體樹分割具有良好的潛力,而對于其他森林類型個體樹點云分割具有不確定性[20]。基于CHM或DSM的圖像分析已經被證明在單木樹冠檢測與分割上有很好的應用潛力,但基于二維圖像,使用SFM和MVS生成的三維點云及通過插值生成的數字高度柵格模型本身就不能很好地重建樹木三維結構和反映樹冠表面形態(tài),尤其對于樹冠互相遮擋嚴重的樹木,三維點云和數字高度柵格模型往往均存在一定的誤差[5,25],而且分割精度還受到插值采樣間隔(即空間分辨率)的影響,Picos等[25]基于冠層高度模型提取桉樹高度,證明了不同空間分辨率下的樹高估計結果具有明顯差異,相比2 m分辨率,更高分辨率0.5 m有著更準確的高度估計。Yin等[26]使用無人機激光雷達數據對紅樹林進行單木檢測與提取,結果證明冠層高度模型分辨率的提高會導致單木檢測與提取的精度呈上升趨勢,而針對該研究區(qū)的最佳分辨率為0.25 m。
本研究將探討使用無人機機載激光雷達數據提取果樹單木樹冠信息的可能性,并定量分析空間分辨率對于單木樹冠檢測與信息提取的敏感性。首先,基于無人機激光雷達數據生成的冠層高度模型,使用局部極大值算法和標記控制分水嶺分割算法實現(xiàn)果樹單木樹冠的檢測與提取;其次,基于提取的樹冠輪廓,計算樹冠面積與直徑。同時評估空間分辨率對于單木樹冠檢測與信息提取的影響,為基于最佳空間分辨率的冠層高度模型提取樹冠信息提供參考。
1 材料與方法
1.1 研究區(qū)概況與數據獲取
研究區(qū)位于中國山東省棲霞市(37°10′8″ N,120°41′23″ E),研究區(qū)東西總長度132 m,南北總長度108 m(圖1)。多數果樹品種為富士,種植時間超過7 a,樹行種植間隔固定為4.5 m,株距為4 m,研究區(qū)共有果樹 573棵,研究區(qū)邊緣非果樹或與其他明顯物體(如電線)有嚴重交叉的果樹將不參與精度驗證。

圖1 研究區(qū)位置Fig.1 Location of study area
無人機機載激光雷達數據采集于2019年7月5日,具體數據獲取時間為 10:00—13:00。無人機型號為 DJI M600(SZ DJI Technology Co.,China),最大起飛質量15.1 kg,續(xù)航時間15~20 min,外形尺寸為1 668 mm×1 518 mm× 759 mm,飛行高度30 m,飛行速度5 m/s。無人機所攜帶的激光掃描儀主要參數如表1所示,激光雷達點云的旁向重疊率為90%。
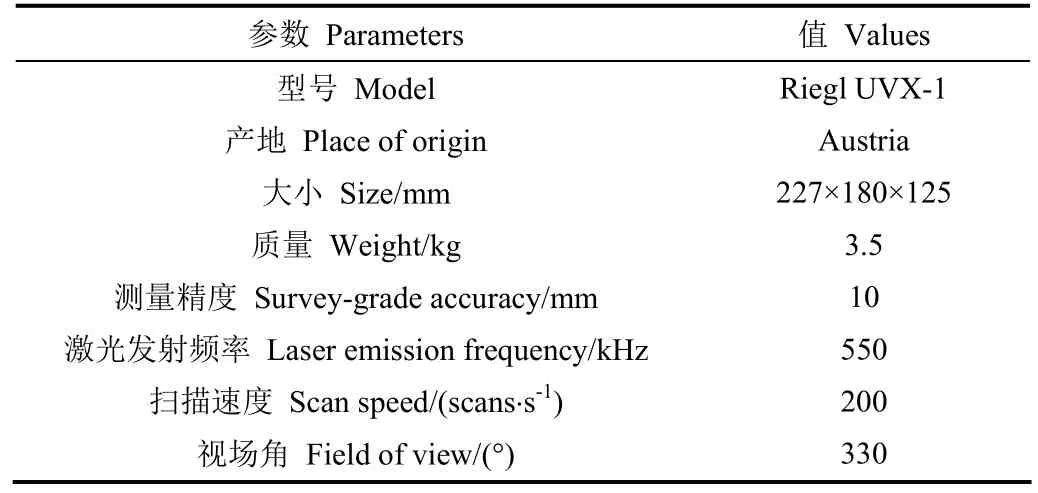
表1 激光掃描儀的主要參數Table 1 Main parameters of laser scanner
為驗證所提出的方法,在激光雷達數據獲取同一天,使用DJI PHANTOM 4 PRO(SZ DJI Technology Co.,China)無人機相機系統(tǒng)采集高分辨率數碼影像,該系統(tǒng)總質量1.388 kg,續(xù)航時間20~30 min,軸距350 mm,飛行高度35 m,飛行速度3 m/s。無人機所攜帶的影像傳感器為CMOS,有效像素2 000萬,數碼影像的航向及旁向重疊度為75%。利用Agisoft PhotoScan Professional 實景三維建模軟件(Agisoft LLC,俄羅斯)完成無人機數碼影像的拼接,生成高清數碼正射影像(圖1b)。基于高清數碼正射影像,目視判讀描繪樹冠輪廓,樹冠面積(Crown Area,CA,m2)由樹冠輪廓得出,將樹冠視作圓形,通過樹冠面積計算樹冠直徑(Crown Diameter,CD,m),計算如式(1)所示。樹冠面積和樹冠直徑的參考數據統(tǒng)計分布情況如表2所示。


表2 樹冠面積和樹冠直徑參考數據的統(tǒng)計分布Table 2 Statistical distribution of the referenced data of tree crown area and tree crown diameter
1.2 研究方法
1.2.1 數據預處理
數據預處理主要有3個步驟:1)基于無人機位置與姿態(tài)測量系統(tǒng)數據(Position and Orientation System,POS)和地面基站定位數據(Global Position System,GPS),采用差分解算和GPS Level Arm 反算方法精準解算無人機飛行軌跡,該操作是在POSPac定位定姿數據處理軟件(Applanix Co.,加拿大)中完成;2)使用 RiPROCESS點云數據處理軟件(REIGL Co.,奧地利)對原始激光數據進行處理,處理步驟包括原始激光數據的在線波形處理;基于無人機的精準飛行軌跡、儀器安裝方向以及視軸調整參數,將激光雷達掃描數據轉換到無人機軌跡數據坐標系統(tǒng)中,精準匹配激光雷達掃描數據與軌跡數據;最后導出三維可視化激光點云數據;3)使用 LiDAR360點云處理軟件(GreenValley Co.,中國)對點云進行去噪處理,采用的是基于空間分布的移除統(tǒng)計離群值(Statistical Outlier Removal,SOR)去噪算法。經過去噪處理,研究區(qū)平均點云密度為2 093點/m2。
1.2.2 冠層高度模型的生成
采用改進的漸進加密三角網濾波算法(Improved Progressive TIN Densification,IPTD)[27]將地面點云與非地面點云分離,基于初始選取的種子點構建稀疏三角網,然后通過迭代處理逐層加密,直到所有激光雷達點分類完畢。由于無人機機載激光雷達所掃描的點云密度較大,地面點云較厚,為提高數字地形模型的準確性,所以提取較厚地面點中間一層較薄且相對平滑的地面點用來生成數字地形模型,稱中位地面點,基于中位地面點生成的數字地形模型相比基于全部地面點生成的數字地形模型更加平滑,更能精確地反映地形變化。基于離散的點云數據實現(xiàn)地面地形和地表上物體的連續(xù)數字化模擬,生成數字地形模型(Digital Elevation Model,DEM)、數字表面模型(Digital Surface Model,DSM),分別反映地面的地形變化和地面物體上的高度變化。因此,基于中位地面點和非地面點,采用反距離權重插值算法(Inverse Distanced Weighted,IDW),使用附近點計算柵格單元的值,并通過點距柵格單元中心點的距離判斷加權平均值,生成DEM和DSM。以上步驟都是在LiDAR360點云處理軟件中完成的,其處理步驟的參數設置如表3所示。數字高度模型(Digital High Model,DHM)是通過DSM減去DEM生成,數字高度模型是指包含地表包括建筑物、樹木和雜草等物體高度的高度模型。
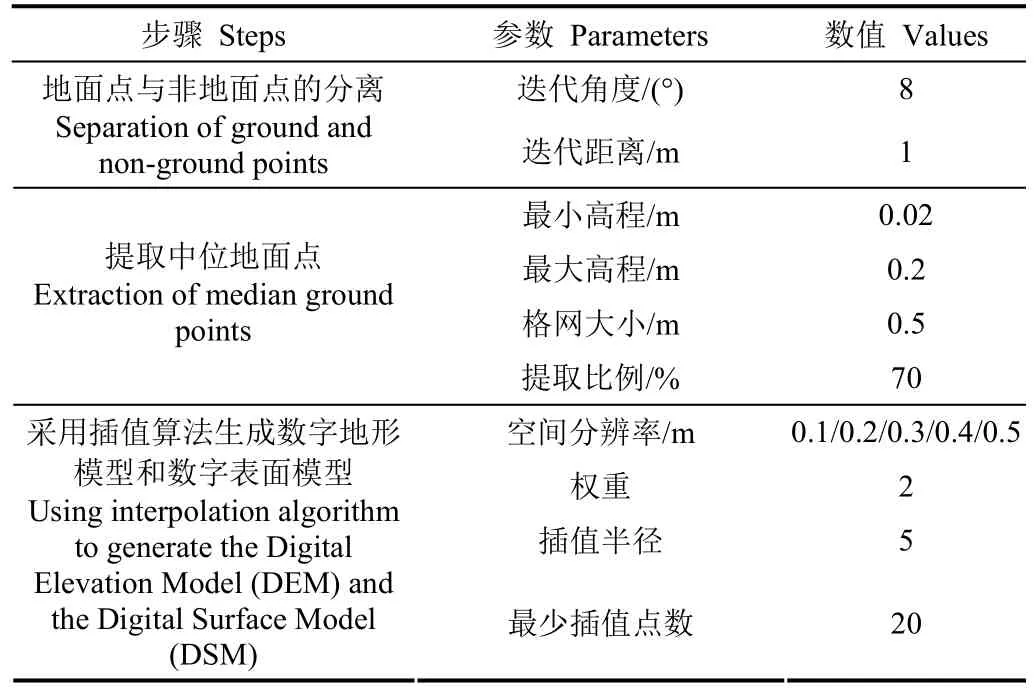
表3 用于生成數字地形模型和數字表面模型的參數設置Table 3 Setting parameters for generating the Digital Elevation Model (DEM) and the Digital Surface Model (DSM)
基于已有關于空間分辨率對于單木樹冠檢測與分割影響的研究[25-26,28],并考慮到果樹樹冠較小,需要更高分辨率圖像來描述樹冠形狀,因此本研究選取 5種不同的空間分辨率:0.1、0.2、0.3、0.4和0.5 m。分辨率從0.1 m降低到0.5 m,平均每個像素內的點從16個增加至484個,對于樹冠直徑2 m的樹冠,樹冠覆蓋平均像素個數從400個降低至16個。
研究區(qū)除了果樹,還包括低矮的雜草和土壤。為只將果樹樹冠高度像素輸入到分割算法中去,通過設定一個高度閾值,將果樹樹冠像素和非果樹樹冠像素分開,因為果園內的其他物體均低于果樹樹冠。通過設置適當的高度閾值,數字高度模型只保留樹冠高度信息,即生成冠層高度模型(Canopy Height Model,CHM),冠層高度模型是指僅包含果樹樹冠高度的數字高度模型,冠層高度模型是其余數據處理的基礎。
1.2.3 基于局部極大值算法的果樹單木檢測
果樹單木樹冠檢測是通過將局部極大值濾波算法應用在冠層高度模型上實現(xiàn)。這種方法利用的是果樹樹冠的高度信息,一個樹冠內至少有一個最高點,即樹頂位置。為消除冠層高度模型存在的圖像噪聲,在使用局部極大值算法之前,使用高斯濾波算法對圖像進行平滑處理,減少圖像噪聲對后續(xù)局部極大值識別的影響。為保證在整張圖像上獲取適量的局部極大值點,局部極大值算法及高斯濾波算法的濾波窗口大小設置為果樹株距大小。圖像中的局部極大值像素點坐標位置,即果樹樹頂位置坐標被保存到點要素矢量文件中,該坐標信息被當作果樹的位置信息,樹頂位置坐標點數量作為檢測果樹的數量被統(tǒng)計。
1.2.4 基于標記控制分水嶺分割算法的果樹樹冠提取
標記控制分水嶺分割算法(Marked-Controlled Watered Segmentation,MCWS)是目前應用最廣泛的一種分割樹冠的方法[29-30],這是一種基于拓撲理論的數字形態(tài)分割算法[31]。其基本思想就是將冠層高度模型看作是測繪學上的拓撲地貌,其高度像素值對應海拔高度,冠層高度模型的高點處看作山峰,低點處看作山谷,山峰及其影響區(qū)域為一個樹冠,而山谷為樹冠的邊界,將山峰倒立于水中,然后在山峰最低處穿孔,當水慢慢浸入,在山谷位置修建大壩防止其聚合,這些大壩就形成了分水嶺,即樹冠邊界[32]。算法中所提到的最低處就是標記點,該方法的前提就是確定標記點。本研究將單木檢測中局部極大值點,即果樹樹頂位置當作標記點,將冠層高度模型輸入到標記控制分水嶺分割算法中去實現(xiàn)果樹樹冠的分割,之后將果樹單木樹冠輪廓結果保存到面要素矢量文件中,面要素的面積為樹冠面積,之后,通過式(1)計算樹冠直徑。
1.3 精度評價
1.3.1 果樹數量與位置
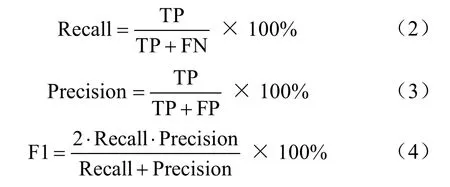
通過對比參考樹冠與果樹樹頂位置之間的空間關系,來評價單木檢測的精度,會出現(xiàn) 3種情況:真陽性(True Positive,TP),果樹被正確地檢測;假陽性(False Positive,F(xiàn)P),將非果樹物體或者部分果樹當作一棵樹;假陰性(False Negative,F(xiàn)N),果樹沒有被檢測到;然后按照式(2)~式(4)計算果樹檢測的查全率(Recall,%),果樹檢測的查準率(Precision,%),綜合考慮查全率和查準率的F1得分(F1,%)。其中查全率表示正確檢測樹頂數量占真實樹頂數量的比例,查準率表示正確檢測樹頂數量占整個檢測結果的比例[20,28]。
1.3.2 果樹樹冠提取
通過對比參考樹冠與提取樹冠輪廓的空間關系,來評價果樹樹冠提取的精度。兩者空間匹配精度分成6類[5,33]:
1)優(yōu)-匹配(Perfect-Match,PM):1個提取樹冠和1個參考樹冠的重疊面積超過兩者自身面積的50%,這個參考樹冠被認為是優(yōu)匹配;
2)良-匹配(Good-Match,GM):1個提取樹冠和1個參考樹冠的重疊面積僅超過提取樹冠或參考樹冠面積的50%,這個參考樹冠定義為良-匹配;
3)遺漏(Missed,Mi):1個提取樹冠和1個參考樹冠的重疊面積不超過兩者自身面積的 50%,這個參考樹冠被認為是遺漏樹冠;
4)合并(Merged,Me):1個提取樹冠覆蓋多個參考樹冠,且至少2個參考樹冠與提取樹冠的重疊面積均超過參考樹冠面積的 50%,這些參考樹冠被認為是合并樹冠;
5)分解(Split,Sp):1個參考樹冠覆蓋多個提取樹冠,且至少2個提取樹冠與參考樹冠的重疊面積均超過提取樹冠面積的50%,這個參考樹冠被認為是分解樹冠;
6)錯誤(Wrong,Wr):樹冠被錯誤地提取,即FP,這種提取樹冠被定義為錯誤樹冠。
基于以上定義,將優(yōu)-匹配和良-匹配樹冠定義為準確提取樹冠,合并和遺漏樹冠為欠分割錯誤,分解和錯誤樹冠為過分割錯誤。然后,通過準確率(Accuracy Rate,AR,%)、欠分割誤差(Omission Error,OE,%)和過分割誤差(Commission Error,CE,%)總體評價樹冠提取精度[33],其計算如式(5)~式(8)所示:
式中NPM、NGM、ΝΜi、NMe、NSp、NWr分別代表優(yōu)-匹配、良-匹配、遺漏、合并、分解及錯誤6種匹配精度對應下的樹冠數量。
1.3.3 樹冠面積與樹冠直徑
為驗證使用該方法提取的果樹樹冠面積與直徑的精度,采用線性回歸方法對提取數據集和參考數據集進行建模分析,使用決定系數(coefficient of determination,R2)來評價提取數據集和參考數據集的相關性[34],此外,使用均方根誤差(Root Mean Square Error,RMSE)來評估提取數據和參考數據之間的誤差。考慮到RMSE對于數據集之間的差距沒有實際的含義,所以計算歸一化均方根誤差(Normalized Root Mean Square Error,NRMSE,%)來比較數據集之間的差異[35]。
2 結果與分析
2.1 數字地形模型(DEM)、數字表面模型(DSM)和數字高度模型(DHM)的生成
由上述方法生成的不同空間分辨率的DEM、DSM和DHM如圖2所示。經果園實地調查,本研究選取0.5 m作為區(qū)分果樹樹冠和低矮雜草、土壤的高度閾值,將果樹樹冠像素與非樹冠像素分開,只保留樹冠高度信息,生成冠層高度模型。
2.2 果樹單木檢測
基于不同空間分辨率的CHM,使用本方法檢測的果樹數量及精度如圖3所示,代表果樹檢測精度的F1得分均超過90%,且當冠層高度模型空間分辨率為0.3 m時,F(xiàn)1得分最高,為 95.03%,其中查全率為 93.37%,查準率為96.75%。

圖2 不同空間分辨率的數字地形模型、數字表面模型和數字高度模型Fig.2 Digital Elevation Model (DEM), Digital Surface Model (DSM) and Digital Height Model (DHM) under different spatial resolutions
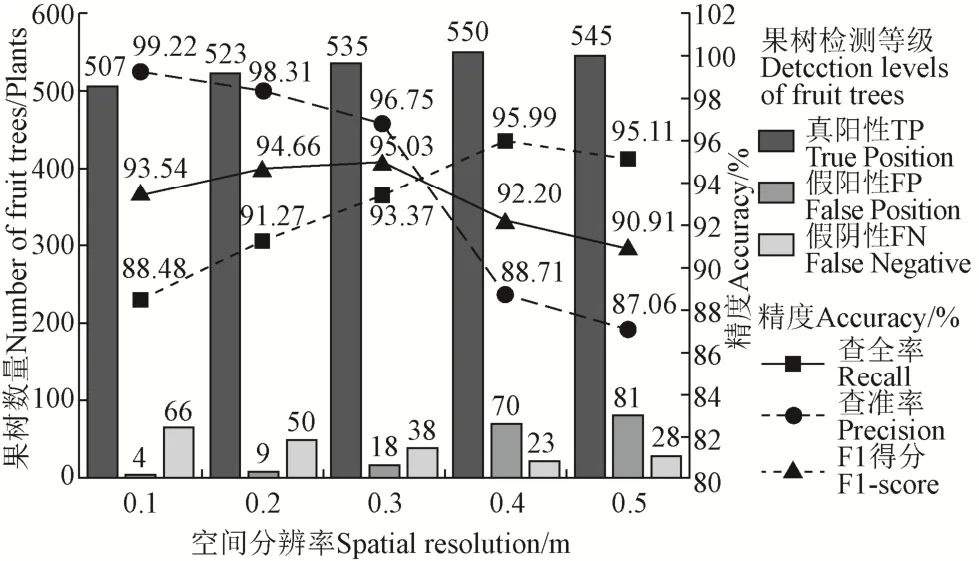
圖3 不同空間分辨率下的果樹檢測結果及精度Fig.3 Detection results and accuracy of fruit trees under different spatial resolutions
2.3 果樹樹冠提取
將基于不同空間分辨率的CHM,使用該方法提取的樹冠和參考樹冠進行疊加,提取樹冠和參考樹冠在輪廓邊緣上不能完全重疊(圖4)。果樹樹冠提取結果與精度如表4所示,果樹樹冠提取準確率均超過80%,當空間分辨率由0.1 m降低到0.5 m時,使用該方法提取果樹樹冠過分割誤差增大,欠分割誤差減小,且當冠層高度模型空間分辨率為 0.3 m時,樹冠提取的準確率最高,為86.39%,欠分割誤差11.52%,過分割誤差5.24%。
2.4 樹冠信息的提取
為評估使用該方法提取果樹單木樹冠信息的精度,本研究對基于冠層高度模型提取的果樹樹冠面積及直徑進行統(tǒng)計分析。其中,基于不同空間分辨率0.1、0.2、0.3、0.4和0.5 m的優(yōu)-匹配的樹冠分別為456、472、461、439和 394棵樹,提取的樹冠面積和直徑統(tǒng)計箱型圖如圖5所示,通過分析可得出,研究區(qū)的果樹樹冠大小具有較大差異,樹冠面積極差>20 m2,樹冠直徑極差>4 m,這導致該方法提取的樹冠面積和直徑精度降低;同時基于不同空間分辨率的冠層高度模型,使用此方法提取的樹冠面積和直徑均被高估。
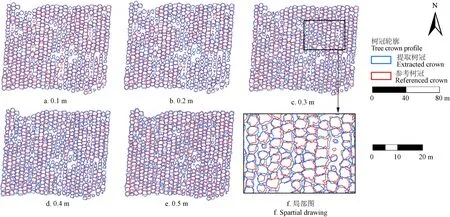
圖4 不同空間分辨率下由冠層高度模型所提取樹冠與參考樹冠的輪廓疊加Fig.4 Contours of the extracted crown by Canopy Height Model (CHM) and the referenced crown be superposed under different spatial resolutions
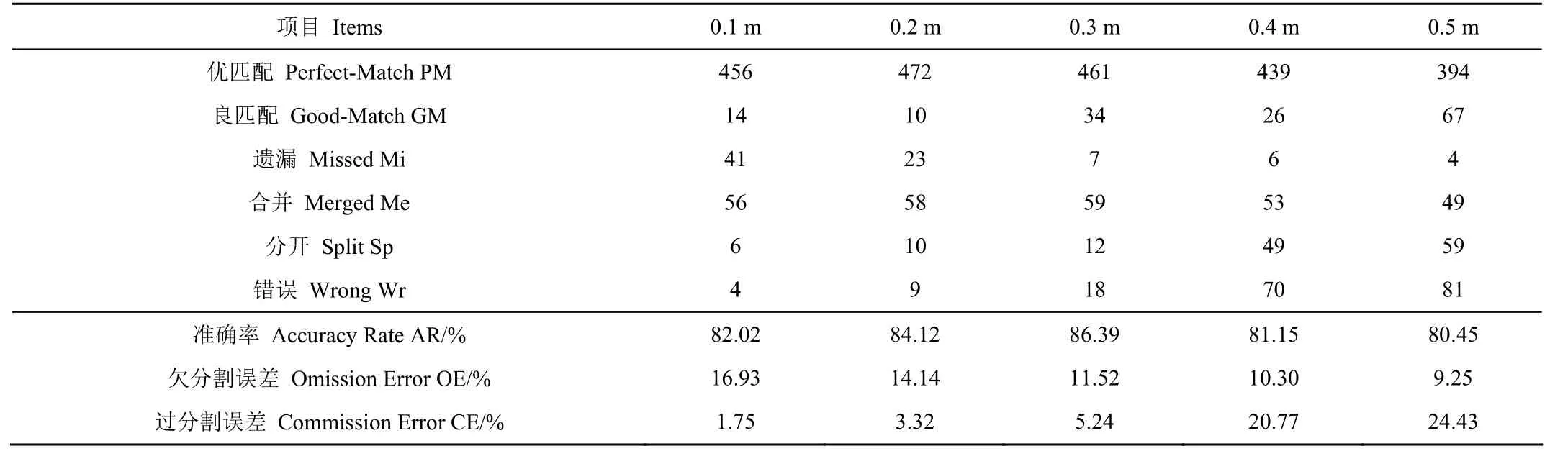
表4 不同空間分辨率下提取樹冠與參考樹冠的匹配結果及精度Table 4 Matched results and accuracy of extracted crown and referenced crown under different spatial resolutions
除上述統(tǒng)計分析,本研究還采用線性擬合的方法來確定參考數據集和提取數據集的數學關系,結果如表5所示,提取數據集和參考數據集的線性擬合結果R2均高于0.7,但NRMSE均低于26%,表明樹冠面積和樹冠直徑均被高估。其中,當空間分辨率為0.3 m時,樹冠面積的提取數據集和參考數據集的線性擬合結果R2和NRMSE分別為0.81和20.56%,樹冠直徑的提取數據集和參考數據集的線性擬合結果R2和NRMSE分別為0.85和14.79%。
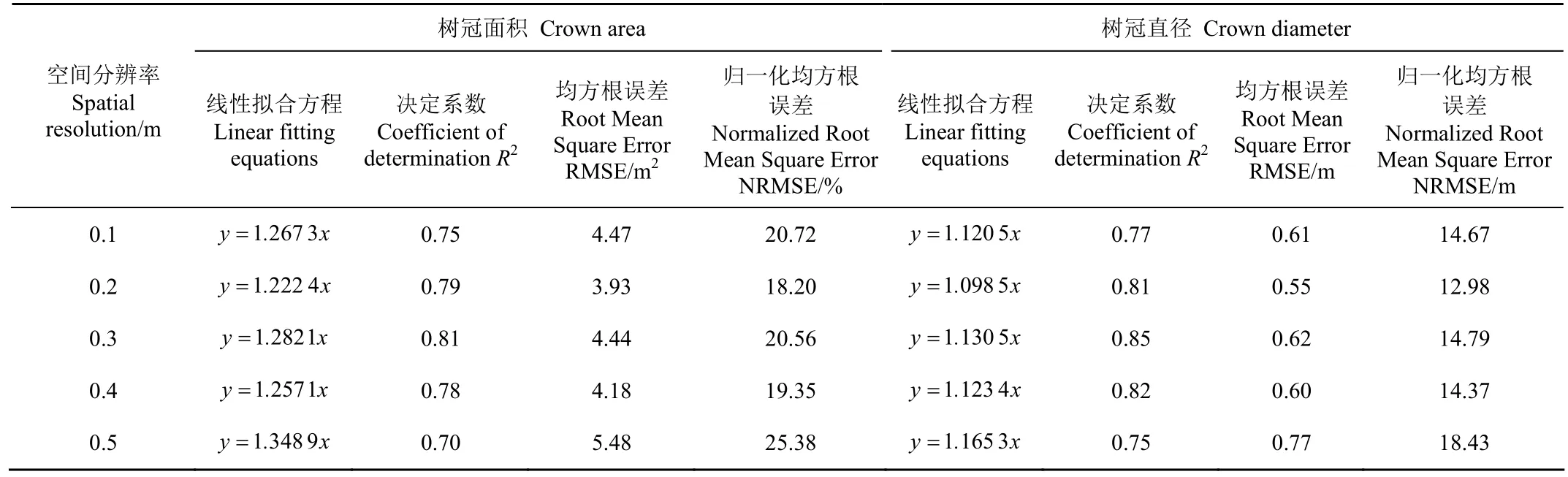
表5 提取數據集與參考數據集的線性擬合結果Table 5 Linear fitting results of the extracted dataset and the referenced dataset
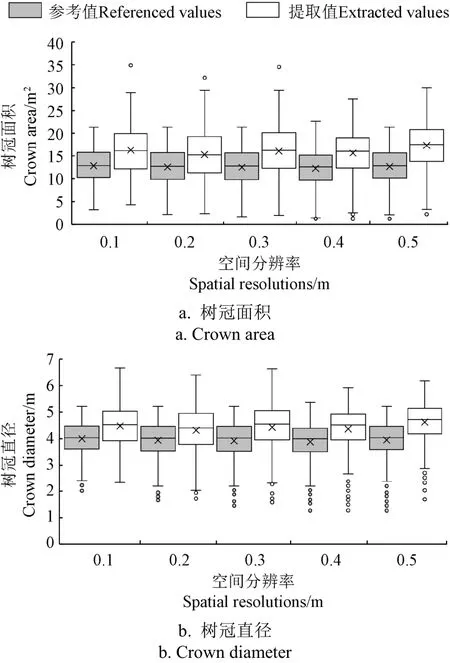
圖5 提取數據集與參考數據集間的統(tǒng)計差異Fig.5 Statistical difference between the extracted dataset and the referenced dataset
3 討 論
3.1 誤差來源
3.1.1 果樹單木檢測
在本研究中,果樹單木樹冠檢測,即樹頂位置的識別,是實現(xiàn)果樹樹冠分割的關鍵步驟。本研究為保證獲取適量的局部極大值點,設置局部極大值算法和高斯濾波算法的濾波窗口大小為果園中果樹的株距4 m,但使用固定窗口大小的局部極大值濾波算法對于不同大小的樹冠檢測效率不一致,本研究區(qū)中果樹樹冠大小具有較大差異,樹冠面積的標準差和極差分別為1.126 m2和21.579 m2,樹冠直徑的標準差和極差分別為0.373 m和4.204 m,所以低矮、樹冠較小的果樹就很難檢測到。因此,在后續(xù)研究中,為提高果樹的檢測效率,可以基于樹冠直徑與樹高的異速生長關系使用不同大小的濾波窗口,但這需要實地調查數據或先驗知識的支撐。
3.1.2 果樹樹冠提取
標記控制分水嶺分割算法是將樹頂之間的局部最小值點當作樹冠邊界,當樹頂檢測不足時,就會出現(xiàn)果樹欠分割的現(xiàn)象,相反,樹頂檢測數量多于真實數量時,過分割的現(xiàn)象就會增多,因此樹冠檢測結果一定程度上影響著樹冠提取的準確性。樹冠邊界的確定還受到果樹聚集密度的影響,樹冠之間的重疊、交叉使得樹冠邊界變的模糊,此時,樹頂之間的局部最小值往往不是樹冠的真實邊界。
為分析果樹聚集密度對樹冠輪廓提取的影響,本研究基于 0.3 m分辨率的冠層高度模型樹冠提取結果做了進一步的分析,在參考數據獲取的基礎上,根據果樹的聚集密度將其分成 3組,沒有與任何樹冠相連的果樹為孤立果樹;在東西南北4個方向中,1到2個方向與其他樹冠相連的果樹為中等密集果樹;3到4個方向與其他樹冠相連的果樹為密集果樹。不同聚集密度果樹的樹冠提取結果如表6所示。
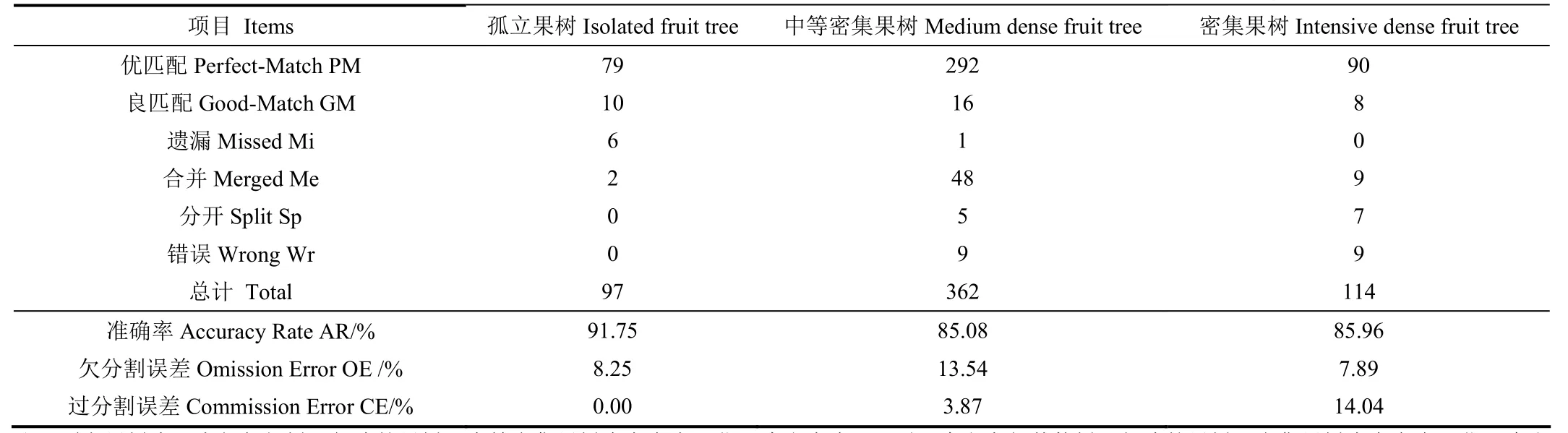
表6 不同果樹聚集密度下提取樹冠與參考樹冠的匹配結果及精度Table 6 Matched results and accuracy of the extracted crown and the referenced crown under different clumping densities of fruit trees
根據分析可得,樹冠提取的準確性隨著果樹聚集密度的增加總體呈下降趨勢,由91.75%下降至85.96%,因為孤立果樹樹冠有明確的邊界,而密集果樹樹冠往往重疊嚴重,對于果樹樹冠提取來說,聚集性是一個嚴重的問題。事實上,在野外實地調查時,也很難找到密集果樹的樹冠邊界,相鄰果樹枝干重疊嚴重,當前方法無法解決這種情況,樹冠提取準確率也會降低,從而造成樹冠面積和樹冠直徑估計的誤差。我們考慮可能解決方案來提高密集果樹冠提取的準確率,直接基于點云數據來提取單個果樹樹冠,因為點云數據可以揭示更多的三維冠層細節(jié),保留樹冠垂直方向上的個體差異,從而更好地分割果樹單木。
3.2 空間分辨率
隨著無人機激光雷達技術的發(fā)展,激光雷達點云密度越來越高,空間分辨率范圍也越來越大,在這種情況下,針對不同場景,不同果園,可選擇的空間分辨率也越來越多。通常來講,更高分辨率的圖像會產生更高的精度,更多的細節(jié)能夠被觀察,但在本研究中,冠層高度模型的最佳分辨率為0.3 m,而不是最高分辨率0.1 m,其中一個原因是使用固定窗口濾波造成果樹樹冠檢測錯誤以及漏檢錯誤,從而造成樹冠過度分割以及欠分割;另一個原因是,當分辨率增高時,圖像細節(jié)被擴大的同時,圖像中的噪聲也被放大,由于果樹樹冠高度變化相似,導致過分割與欠分割錯誤的出現(xiàn)。在本研究區(qū)中,果樹的平均樹冠直徑為3.87 m,所以可以認為冠層高度模型的空間分辨率應接近樹冠直徑的1/10,以便有效檢測果樹單木樹冠以及提取樹冠輪廓,從而準確提取果樹單木樹冠信息。
4 結 論
本研究探索了使用無人機激光雷達技術提取果樹單木樹冠信息的可能性,并分析了空間分辨率對結果的影響。結果表明:
1)基于無人機機載激光雷達數據生成冠層高度模型(空間分辨率0.1、0.2、0.3、0.4和0.5 m),采用局部極大值算法和標記控制分水嶺分割算法,可以準確地檢測果樹并提取果樹樹冠,從而基于樹冠輪廓提取果樹單木樹冠信息,代表果樹檢測精度的F1得分均高于90%,只有個別低矮、樹冠較小的果樹沒有被檢測到;樹冠輪廓提取準確率均高于 80%;對果樹單木樹冠面積和樹冠直徑也進行了高精度的提取,參考數據集和提取數據集的決定系數均高于0.7,歸一化均方根誤差均低于26%,這表明使用該方法可以實現(xiàn)果樹單木樹冠信息的提取。
2)果樹單木檢測與樹冠提取的結果還受到冠層高度模型空間分辨率的影響,分辨率的增大會導致果樹檢測錯誤減少和漏檢錯誤增加,造成樹冠過分割錯誤減少和欠分割錯誤增加。本研究中,當空間分辨率為0.3 m時,其總體精度是最高的,其中代表果樹檢測精度的F1得分為95.03%,樹冠提取準確率為86.39%,樹冠面積的提取數據集和參考數據集的線性擬合結果決定系數和歸一化均方根誤差分別為0.81和20.56%,樹冠直徑的提取數據集和參考數據集的線性擬合結果決定系數和歸一化均方根誤差分別為0.85和14.79%。因此,提出一個經驗法則,冠層高度模型的分辨率應接近果樹平均樹冠直徑的1/10,以便有效檢測果樹單木樹冠以及提取樹冠輪廓,從而準確提取果樹單木樹冠信息。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
海峽科技與產業(yè)(2016年3期)2016-05-17 04:32:12