大型油輪艏搖混沌現(xiàn)象的仿真與滑模控制
2021-01-18 07:15:54張顯庫(kù)
上海交通大學(xué)學(xué)報(bào) 2021年1期
張顯庫(kù),韓 旭
(大連海事大學(xué) 航海學(xué)院,遼寧 大連 116026)
在航海實(shí)踐中,有經(jīng)驗(yàn)的駕駛員在操縱大型油輪時(shí)常常發(fā)現(xiàn),即使在非惡劣海況下也很難讓船舶保持直線航行,船首呈現(xiàn)出一種不規(guī)則的隨機(jī)擺動(dòng),這種現(xiàn)象用常規(guī)理論來解釋非常困難.如果對(duì)這種異常現(xiàn)象不從理論上進(jìn)行深入研究,可能會(huì)對(duì)航行安全和高效航運(yùn)帶來不良影響,更會(huì)阻礙無人自主船舶的研究進(jìn)程.相比于其他船舶,大型油輪往往旋回性好而直航性差,很可能是這一特性導(dǎo)致其更容易出現(xiàn)不規(guī)則艏搖的現(xiàn)象.本研究以大型油輪為對(duì)象研究不規(guī)則艏搖現(xiàn)象,所述研究方法也適用于具有類似特性的其他類型船舶.
船舶有6個(gè)自由度,但到目前為止橫搖運(yùn)動(dòng)中的混沌[1]仍是船舶混沌研究的主流,其他維度的研究則相對(duì)較少.文獻(xiàn)[2]總結(jié)了20世紀(jì)船舶非線性運(yùn)動(dòng)的研究狀況,這些研究主要集中在橫搖、垂蕩、系泊以及可能導(dǎo)致傾覆的打橫上.文獻(xiàn)[3-4]運(yùn)用動(dòng)力學(xué)方法研究了小型船在尾迎浪時(shí)的異常縱蕩,并指出船舶在特定海浪頻率與波長(zhǎng)下會(huì)出現(xiàn)混沌瞬態(tài)以及長(zhǎng)期混亂運(yùn)動(dòng).事實(shí)上除橫搖外,航海實(shí)踐上最關(guān)心的是艏搖,因?yàn)轸紦u直接影響航行的效率.考慮到船舶運(yùn)動(dòng)及海況干擾的非線性特性,本研究試圖直接用非線性系統(tǒng)理論中的混沌理論來解釋航海實(shí)踐中的異常艏搖現(xiàn)象.混沌現(xiàn)象是一種非線性動(dòng)力系統(tǒng)中廣泛存在的確定性、類隨機(jī)的過程,這種過程沒有周期性且不收斂,對(duì)初始值敏感而難以掌控.目前針對(duì)艏搖混沌的研究相對(duì)較少,文獻(xiàn)[5]探討了能否用混沌理論來解釋異常艏搖,但該研究建立的混沌方程中,阻尼項(xiàng)和剛度參數(shù)范圍與實(shí)船情況差異較大.文獻(xiàn)[6]試圖改進(jìn)文獻(xiàn)[5]中一些不合理的參數(shù),并設(shè)計(jì)了魯棒控制器來控制混沌運(yùn)動(dòng).盡管如此,文獻(xiàn)[6]中的個(gè)別參數(shù),例如海浪頻率與浪高的描述在實(shí)際情況中是極為罕見的,因此其解釋仍無法讓人信服.文獻(xiàn)[7]嘗試使用Liu混沌系統(tǒng)重新解釋大型油輪的混沌艏搖現(xiàn)象,通過對(duì)所構(gòu)造的船舶Abkowitz模型進(jìn)行化簡(jiǎn)和變形,發(fā)現(xiàn)所得結(jié)果與Liu混沌系統(tǒng)形似,但在深入分析后,得到的結(jié)果否定了用Liu混沌系統(tǒng)解釋的設(shè)想.文獻(xiàn)[5]在研究操縱閉環(huán)控制時(shí)使用了比例控制器模擬駕駛員的操縱,本文為了更真實(shí)描述有經(jīng)驗(yàn)駕駛員的操縱特性,引入了人的數(shù)學(xué)模型[8-10],從而再現(xiàn)操縱大型油輪過程中出現(xiàn)的混沌現(xiàn)象,為進(jìn)一步設(shè)計(jì)有效的混沌抑制控制算法打下基礎(chǔ).文獻(xiàn)[11-12]沿用文獻(xiàn)[6]的思路,給出了Duffing方程形式的混沌模型并使用自適應(yīng)和滑模控制方法實(shí)現(xiàn)了參數(shù)不確定下航向保持的穩(wěn)定控制,但最后未能給出所設(shè)計(jì)控制輸入與操舵舵角的對(duì)應(yīng)關(guān)系.
反步法是非線性控制中的常見方法,它基于Lyapunov定理設(shè)計(jì)控制器從而保證被控系統(tǒng)的穩(wěn)定[13].但此方法設(shè)計(jì)的控制器通常魯棒性不足,在干擾和參數(shù)攝動(dòng)下控制效果會(huì)大打折扣.滑模控制是一種常見的魯棒控制方法,通過控制量切換引導(dǎo)系統(tǒng)狀態(tài)沿滑模面滑動(dòng),使系統(tǒng)在外部干擾和參數(shù)攝動(dòng)下具有不變性.但在應(yīng)用時(shí)要注意防止滑動(dòng)模態(tài)上的抖振問題,目前代表性的解決方法有準(zhǔn)滑動(dòng)模態(tài)方法的邊界層設(shè)計(jì)、更改滑模面的趨近律的方法、濾波方法、觀測(cè)器方法、動(dòng)態(tài)滑模以及智能控制優(yōu)化等方法[14],本研究由于計(jì)算最終執(zhí)行器輸出(即舵角)時(shí),必然存在一個(gè)一階慣性項(xiàng)作用于滑模率,所以控制率本身不需要做進(jìn)一步處理,舵角也不會(huì)出現(xiàn)劇烈抖振.從滑模控制率對(duì)舵角的影響來看,這相當(dāng)于采用了濾波方法.
1 有經(jīng)驗(yàn)駕駛員的數(shù)學(xué)模型
駕駛員對(duì)系統(tǒng)的影響很復(fù)雜,但若粗獷處理的話可以認(rèn)為主要是一系列延遲和增益的組合,文獻(xiàn)[5]所給出的駕駛員模型為轉(zhuǎn)艏速率誤差的比例模型,并未考慮駕駛員應(yīng)變及操縱所需的時(shí)間,因而精確性和說服力相對(duì)不足,這里參照文獻(xiàn)[8]所提出的駕駛員模型,采用傳遞函數(shù)形式描述駕駛員對(duì)系統(tǒng)的影響,輸入和輸出分別為操舵角和航行誤差.
(1)
式中:GH(s)為傳遞函數(shù)形式的駕駛員模型;s為拉普拉斯算子;δ為舵角;Δψ為航向改變量;Kp為靜態(tài)船舶駕駛員增益,取值為1~300;τ為時(shí)滯,反映了駕駛員的固有延時(shí)特性,取值0.1~0.6 s,是駕駛員反應(yīng)與動(dòng)作的必要時(shí)間;e為自然常數(shù);Tn為人體動(dòng)作慣性常數(shù),一般取0.1~0.2 s;Tl為大腦滯后補(bǔ)償時(shí)間常數(shù),一般取1~30 s.

(2)
將式(2)代入式(1),并忽略低頻時(shí)(s=jω→0,j為虛數(shù)單位,ω為信號(hào)頻率)的二階和三階小量,式(1)可近似為一階模型

(3)
式中:Tp=Tn+τ+Tl.
2 船舶運(yùn)動(dòng)響應(yīng)型非線性數(shù)學(xué)模型
船舶模型有多種形式,其中Nomoto模型因其簡(jiǎn)單實(shí)用的特性而具有很高的使用率,但其推導(dǎo)過程需要使用昂貴的海試數(shù)據(jù),否則需要使用Clarke整理的線性流體動(dòng)力導(dǎo)數(shù)[15],而Clarke的研究發(fā)表于1982年,隨著近幾十年來船舶的大型化,其精度有所下降.在文獻(xiàn)[6]和[15]中給出了一種非線性的Nomoto模型,非線性項(xiàng)的增加使船舶的運(yùn)動(dòng)得到了更加準(zhǔn)確的描述.具體如下:
(4)
3 船舶廣義數(shù)學(xué)模型混沌分析
Duffing方程是一種典型的混沌方程,其一般形式為
(5)
通過比較可知,式(5)與式(4)形似,故可以用Duffing方程研究船舶運(yùn)動(dòng)中的混沌現(xiàn)象.
將式(3)變成輸入為航向誤差的微分方程的形式:
(6)


(7)
由于海浪可用正弦波描述,船舶在海浪作用下的艏搖也表現(xiàn)出正弦性質(zhì),所以此處可用正弦波描述海浪作用下的艏搖,令式(6)中Δψ=Bsin(ω1t),針對(duì)T3與Tp相近的系統(tǒng),再將替換后的式(6)代入式(7),可得:

(8)
式中:B為海浪對(duì)船舶的擺艏增益,取值范圍為0~2π;ω1為艏搖角頻率,其取值范圍依據(jù)海浪常見周期設(shè)定為0.25~1.25 rad/s,這里取ω1=0.25 rad/s;Kp=250,Tp=28,B=2.5.經(jīng)過觀察發(fā)現(xiàn),式(8)和(5)形式上很相似,所以預(yù)言當(dāng)參數(shù)配置適當(dāng),船舶廣義數(shù)學(xué)模型有混沌解,船舶航向保持過程中存在混沌現(xiàn)象.
表1所示為大型油輪Davis Sea的船舶參數(shù),計(jì)算得出相應(yīng)參數(shù)為a1=0.087 74,a0=0.000 85,c0=48.864,b1=0.000 91.
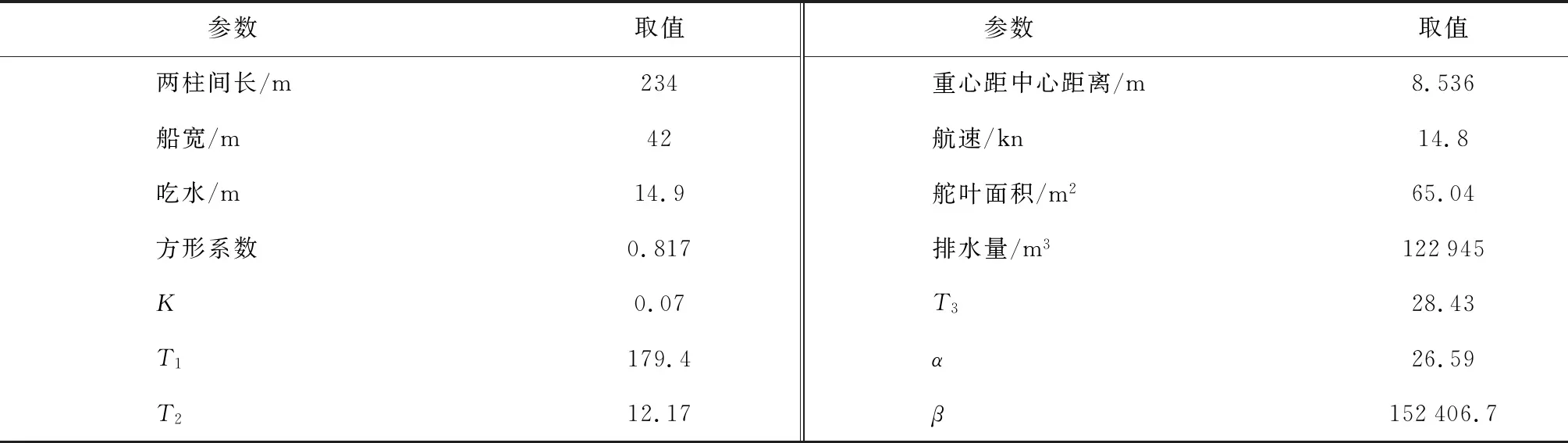
表1 大型油輪Davis Sea的船舶參數(shù)Tab.1 Ship parameter of large oil tanker Davis Sea
采用四階-五階Runge-Kutta算法(ode45)對(duì)該系統(tǒng)的狀態(tài)變化求解,初始值為(x1,x2)=(0,0),系統(tǒng)的相圖及分岔圖分別如圖1和2所示.相圖的橫縱坐標(biāo)皆為狀態(tài)變量,由相圖可以看到系統(tǒng)狀態(tài)變量的變化軌跡.分岔圖則展現(xiàn)的是某一狀態(tài)變量隨系統(tǒng)參數(shù)的變化情況,其中虛點(diǎn)的部分意味著系統(tǒng)狀態(tài)的不穩(wěn)定(不收斂),蘊(yùn)含著發(fā)生混沌的可能.

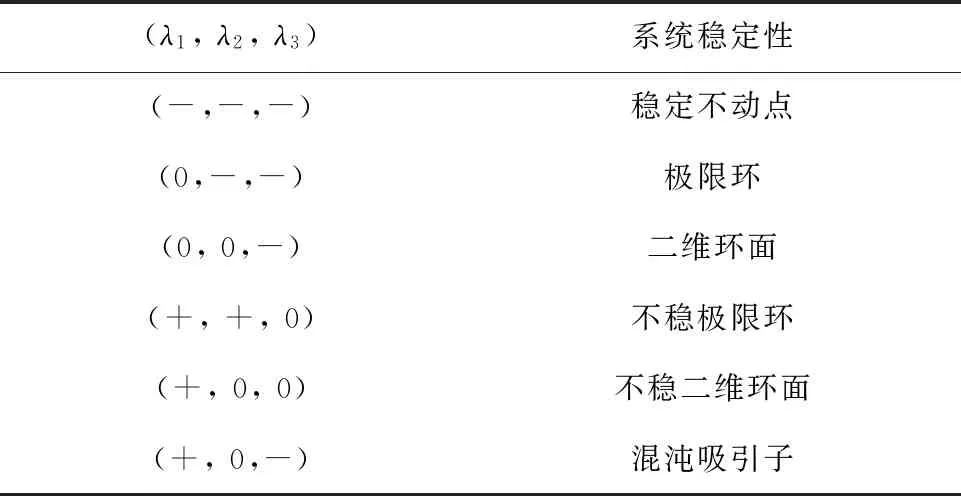
表2 三維系統(tǒng)Lyapunov指數(shù)與系統(tǒng)穩(wěn)定性對(duì)應(yīng)關(guān)系Tab.2 Correspondence between Lyapunov exponent and system stability in 3-dimensional systems
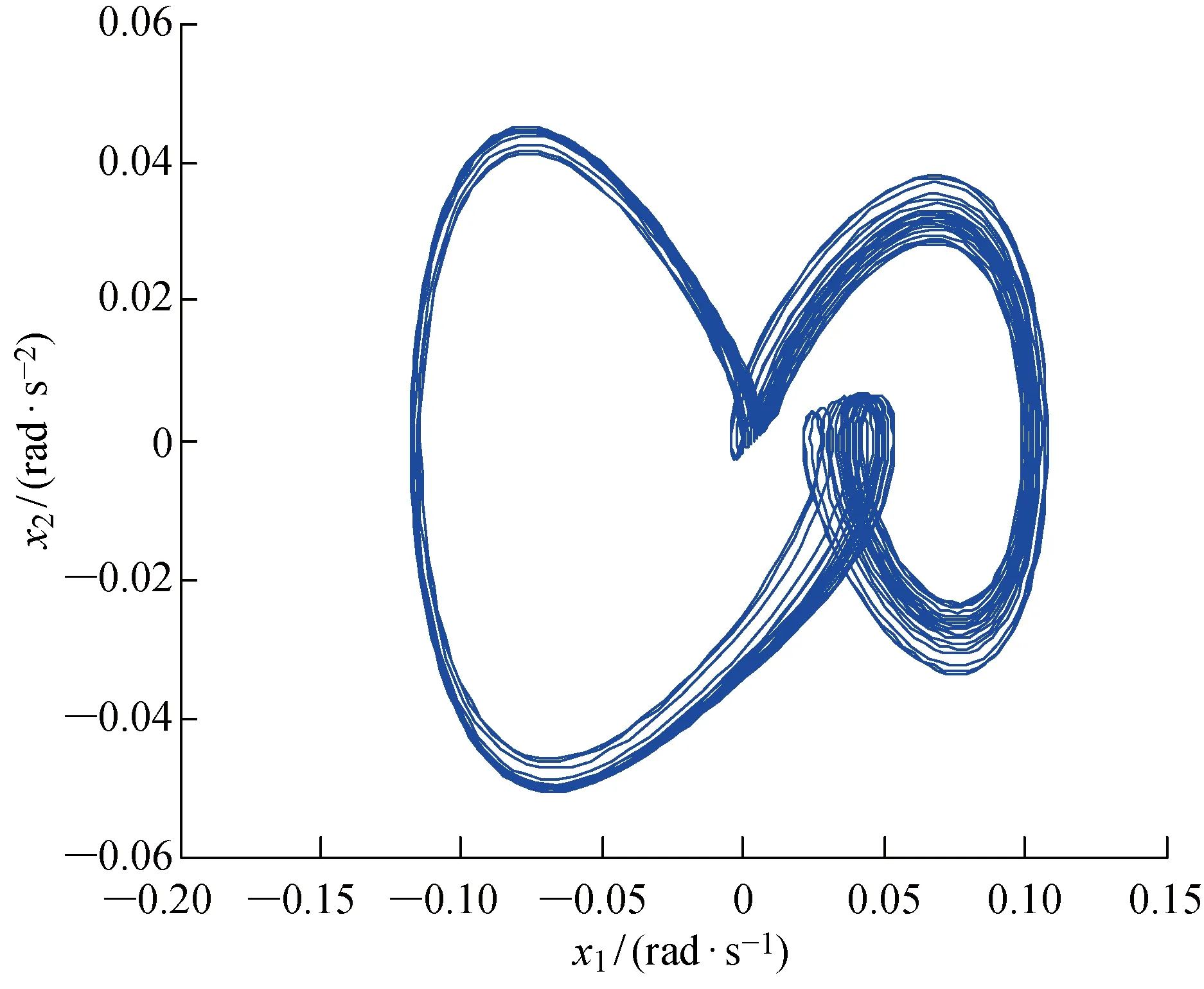
圖1 系統(tǒng)相圖Fig.1 System phase
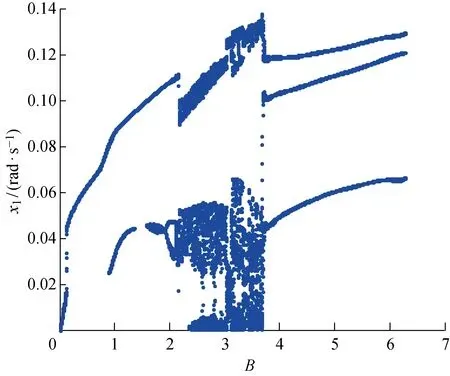
圖2 B=0~2π時(shí)的系統(tǒng)分岔圖Fig.2 Bifurcation diagram at B=0—2π
本文采用Jacobi方法求解Lyapunov指數(shù),其基本原理是首先求解出系統(tǒng)微分方程的近似解,然后對(duì)系統(tǒng)的Jacobi矩陣進(jìn)行QR(正交三角)分解,并計(jì)算其特征值的乘積,從而計(jì)算出系統(tǒng)的Lyapunov指數(shù),具體的計(jì)算原理如下[17].
對(duì)于微分方程
(9)


(10)
J是F的Jacobi矩陣,式(10)的解可表示為
ε(t)=U(ε(0),t)
(11)
式中:U為ε(0)→ε(t)的映射,ε(0),ε(t)分別指ε在0時(shí)刻和t時(shí)刻的值.U的漸進(jìn)行為可用指數(shù)λ表示為
(12)
系統(tǒng)的Lyapunov指數(shù)可定義為上述重復(fù)過程的均值,即

(13)
Lyapunov指數(shù)值隨時(shí)間的變化如圖3所示,最終迭代出的結(jié)果為λ1=0.008 718 9,λ2=0,λ3=-0.096 459,符合表2混沌吸引子的特性,故可以確定系統(tǒng)在此狀態(tài)下出現(xiàn)了混沌現(xiàn)象.
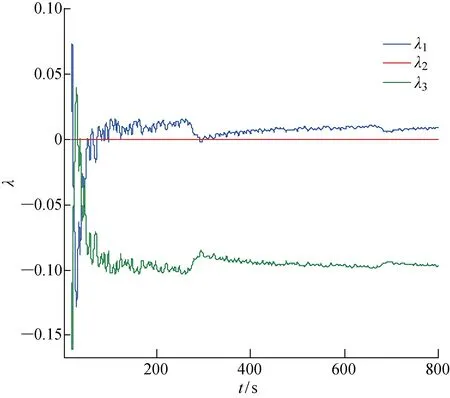
圖3 系統(tǒng)的Lyapunov指數(shù)Fig.3 Lyapunov exponents of system
功率譜形狀也是判斷混沌的途徑之一.功率譜圖的尖峰意味著周期性,而混沌運(yùn)動(dòng)功率譜不再出現(xiàn)離散的譜線,像噪聲一樣是連續(xù)的過程.圖4給出了此時(shí)的系統(tǒng)功率譜(PSD),可見無法從噪聲中區(qū)分明顯的尖峰,這意味著沒有顯著的周期性,進(jìn)一步佐證了混沌的發(fā)生.

圖4 系統(tǒng)功率譜Fig.4 Power spectrum of system
為直觀展示混沌與艏搖的關(guān)系,圖5給出了狀態(tài)變量x1(即轉(zhuǎn)艏角速度r)隨時(shí)間的變化情況.可以看到,雖然約每25 s船舶會(huì)完成一輪艏搖,但艏搖的過程不盡相同,具有非周期性和混沌特點(diǎn).
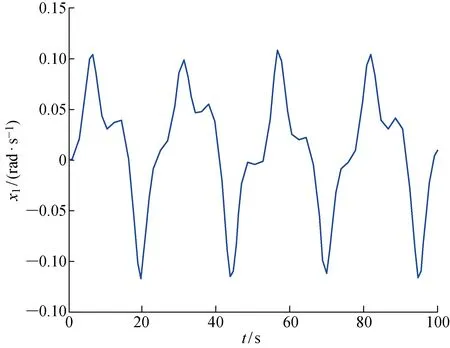
圖5 狀態(tài)變量x1隨時(shí)間變化曲線Fig.5 Time curve of state variable x1
通過進(jìn)一步調(diào)整參數(shù)ω1我們發(fā)現(xiàn),在B的取值范圍內(nèi),當(dāng)Kp、Tp不變而ω1增大時(shí),導(dǎo)致混沌發(fā)生的B的初值增大;相應(yīng)地,當(dāng)ω1減小時(shí)會(huì)使能造成混沌的B初值減小.但無論ω1過大還是過小都會(huì)導(dǎo)致混沌現(xiàn)象的消失(ω1取值范圍決定了本例不存在混沌消失下界).就式(8)規(guī)定的系統(tǒng)來說,這一規(guī)律具有普適性,只是針對(duì)不同船舶,ω1和B的臨界值會(huì)有所改變.如圖6所示,經(jīng)過測(cè)試,油輪Davis Sea可以導(dǎo)致艏搖混沌的海浪區(qū)間為0.25 rad/s≤ω1≤0.38 rad/s.由以上分析可以確定,海況穩(wěn)定時(shí)遇到不規(guī)則艏搖極可能為混沌現(xiàn)象.
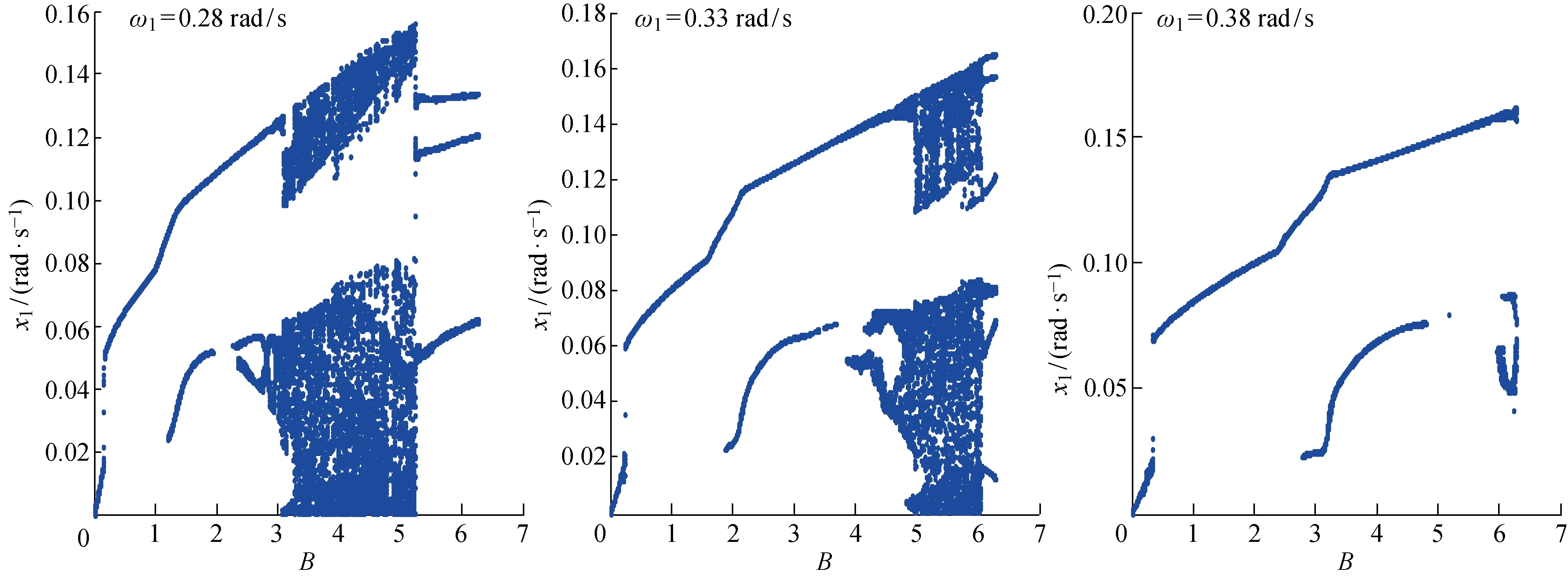
圖6 不同角頻率下的系統(tǒng)分叉圖Fig.6 System bifurcation at different angular frequencies
4 基于反步法的滑模控制
為控制式(8)所示系統(tǒng),在式(8)的第2式后加入一個(gè)控制項(xiàng)u,使被控系統(tǒng)變?yōu)?/p>
(14)


(15)

(16)
式中:x2d為x2的控制目標(biāo)值.定義關(guān)于x2的誤差變量γ,
γ=x2d-x2
(17)
將式(16)、(17)代入式(15),得到

(18)
而

(19)

(20)

(21)

|f||γ|-ρ|γ|-k1e2-k2γ2≤
ρ|γ|-ρ|γ|-k1e2-k2γ2=
-k1e2-k2γ2
(22)
使用式(7)來獲取舵角δ,即

(23)

5 仿真結(jié)果
代入相關(guān)數(shù)據(jù),設(shè)定B=2π(取最大可能值,若此條件能控,更小的值必然能控),取ρ=0.07,k1=k2=1,控制前后的艏搖速率和控制舵角如圖7和8所示,仿真結(jié)果以角度制表示以便直觀理解.控制作用施加于80 s,舵角限幅20°.
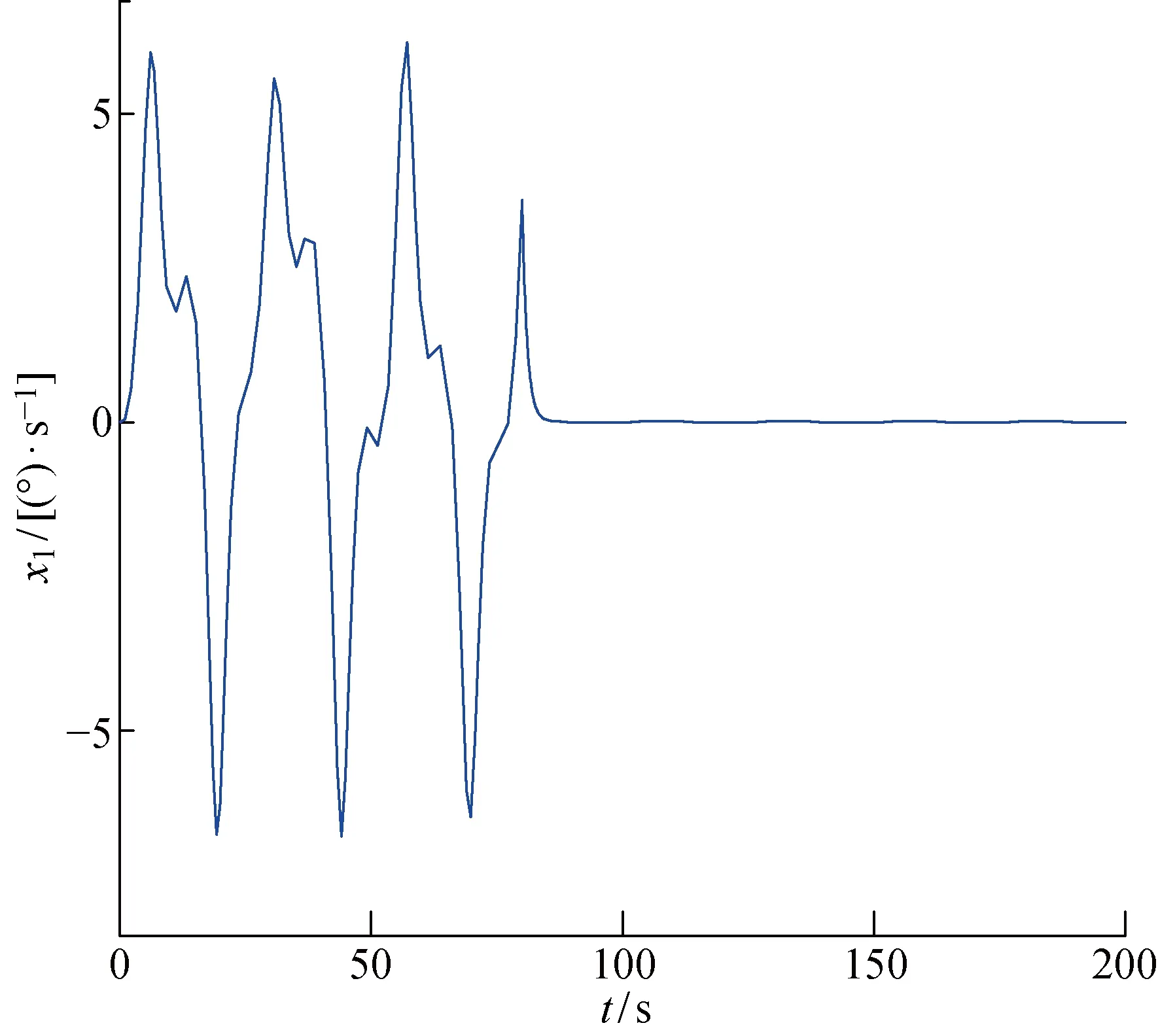
圖7 控制前后轉(zhuǎn)艏速率Fig.7 Turning rate before and after control
由圖7可以看出未加控制時(shí)系統(tǒng)處于混沌艏搖狀態(tài),應(yīng)用控制后航向迅速穩(wěn)定,|x1|的最大值從6.6°/s降到0.12°/s,積分后可知航向穩(wěn)態(tài)偏差小于0.07°.由圖8可知控制舵角絕對(duì)值最大為17.2°,穩(wěn)定舵角絕對(duì)值最大為5°,控制效果令人滿意.
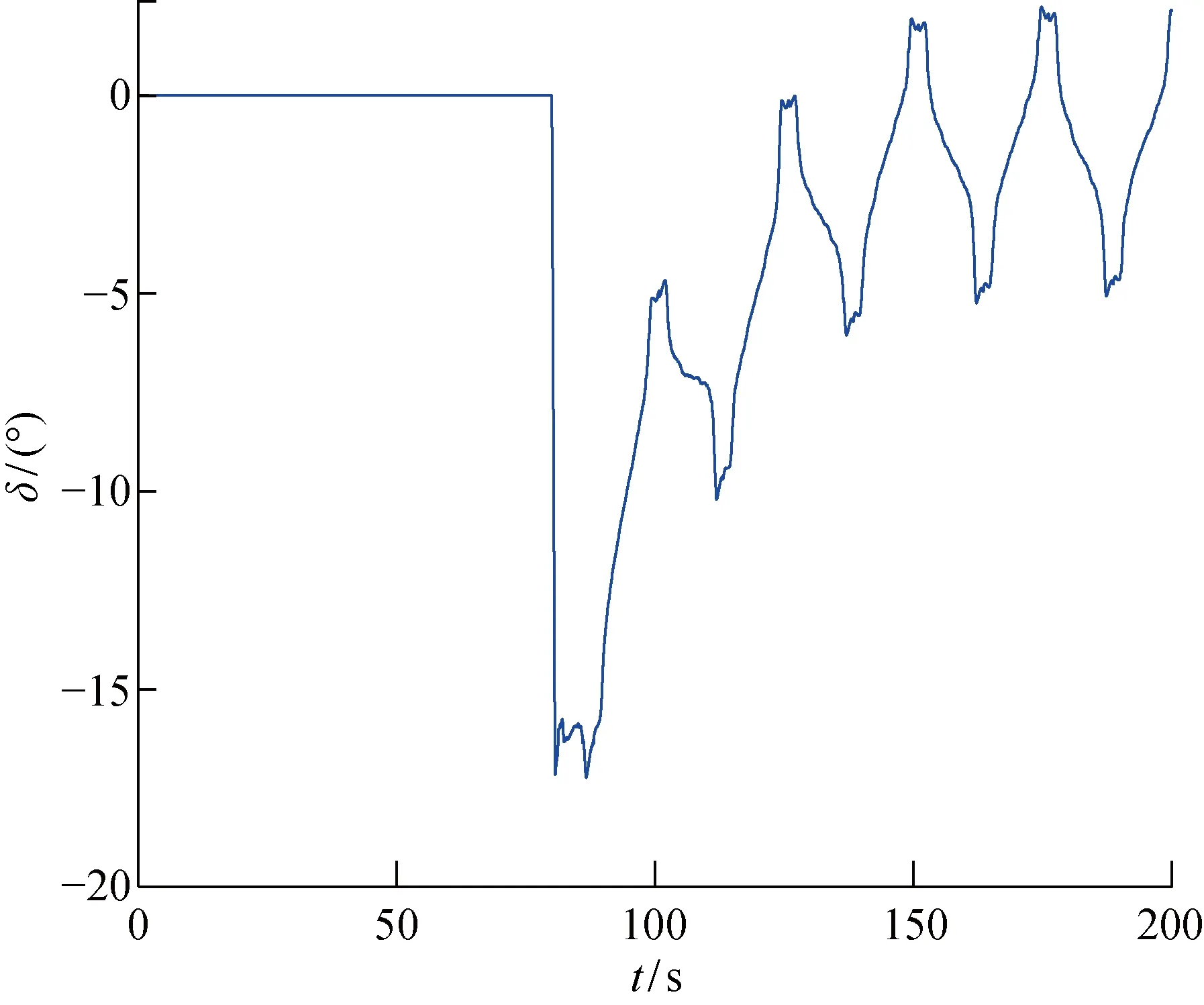
圖8 控制舵角Fig.8 Controlling rudder angle
6 結(jié)語
大型油輪的不規(guī)則艏搖確實(shí)可以用混沌理論解釋.由于船舶性能與迎浪幅頻的差異,艏搖模型參數(shù)存在著變動(dòng)區(qū)間,變動(dòng)區(qū)間內(nèi)存在能造成混沌的部分,因此這種不規(guī)則艏搖是可能發(fā)生的.不規(guī)則艏搖現(xiàn)象得到了相對(duì)合理的解釋,造成混沌的參數(shù)區(qū)間也已得出.為避免不規(guī)則艏搖,又針對(duì)所建模型提出了相應(yīng)的滑模控制率,避免了測(cè)量海浪頻率的同時(shí)改善了控制系統(tǒng)的魯棒性,為消除混沌艏搖的不利影響給出了一種不錯(cuò)的思路和方案.
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
艦船科學(xué)技術(shù)(2022年14期)2022-09-22 03:07:40
汽車實(shí)用技術(shù)(2022年14期)2022-07-30 06:13:42
汽車實(shí)用技術(shù)(2022年4期)2022-03-07 06:07:20
船舶(2021年4期)2021-09-07 17:32:22
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學(xué))(2019年10期)2020-01-18 09:16:22
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
公民與法治(2016年4期)2016-05-17 04:09:26