基于RBF積分滑模的無人艇集群協同路徑跟蹤控制
2021-01-16 05:17:46施文煜曲星儒滕建平
水下無人系統學報 2020年6期
施文煜, 梁 霄, 曲星儒, 滕建平
基于RBF積分滑模的無人艇集群協同路徑跟蹤控制
施文煜, 梁 霄*, 曲星儒, 滕建平
(大連海事大學 船舶與海洋工程學院, 遼寧 大連, 116026)
為滿足船舶護航、目標圍捕等任務要求, 文中提出了一種基于路徑參數循環的欠驅動無人艇集群協同路徑跟蹤控制方法。在運動學設計方面, 結合視線制導與一致性算法, 設計無人艇集群協同制導律, 得到閉曲線上對稱的編隊隊形, 實現對目標點進行圍捕。在動力學設計方面, 考慮動力學模型不確定性及傳統滑模導致的抖振問題, 利用神經網絡逼近特性和飽和函數, 設計基于自適應徑向基函數神經網絡的分布式積分滑模控制器, 保證無人艇能夠精確跟蹤制導信號, 從而提高系統抗干擾性和路徑跟蹤精度。Lyapunov穩定性分析證明了閉環系統誤差是全局漸近穩定的。仿真結果表明了所提出集群協同控制方法的有效性。
無人艇; 集群; 協同路徑跟蹤; 視線制導; 積分滑模; 自適應徑向基函數
0 引言
水面無人艇(unmanned surface vessel, USV)作為一種無人海洋智能運載平臺, 擁有體積小、航速快以及機動性強等特點, 在軍事和民用領域都有著極其廣泛的應用前景。隨著海洋作業任務的日趨多樣化, 單USV難以滿足其實際應用需求。在此背景下, 構建多USV集群系統, 令多個USV協同完成作業任務成為全球發展趨勢。
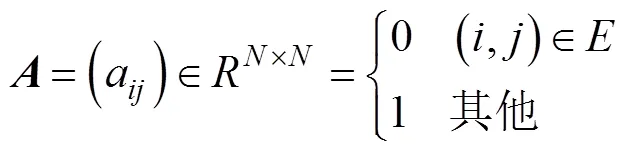
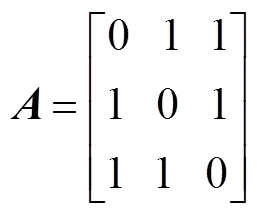
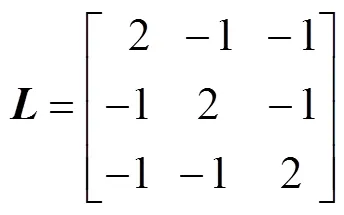
協同控制問題作為構建USV集群系統的基礎, 近年來已成為各國學者研究的熱點, 并取得了豐富的研究成果。目前, 常見的協同控制方法主要包括: 領航跟隨法[1]、基于行為法[2]、虛擬結構法[3]和人工勢場法[4]等。Ghommam等[5]基于虛擬結構法, 利用李雅普諾夫直接法和反步法設計了一種無人艇集群路徑跟蹤控制器。Hong等[6]研究了領航跟隨方法和可變互連拓撲的多智能體系統一致性問題, 在考慮領航者狀態不斷變化且不可測的情況下, 基于鄰居信息設計局部控制器, 使得各智能體都能跟隨領航者且保證領航者狀態估計誤差有界。李蕓等[7]將領航跟隨法與人工勢場法相結合以彌補單一領航跟隨控制方法過于集中控制的不足。然而, 上述控制算法在存在局部極小值及目標不可達問題時, 無法保持穩定的編隊隊形, 而一致性協同控制方法可基于個體信息交互, 使集群系統中各USV信息在控制律作用下趨于一致, 以實現穩定的編隊隊形。對于多USV系統一致性問題, 通常基于矩陣理論、代數圖論、穩定性理論和控制理論等理論知識以及相關的數學建模和USV系統的局部通信關系拓撲來進行研究。Jadbabie等[8]基于Vicsek模型, 引入圖論、線性系統理論以及動態系統理論等對算法進行線性化, 使各智能體在有界的區域內網絡拓撲結構保持聯通的情況下, 各智能體位置和速度的運動方向在控制器的控制下最終實現一致。文獻[9]基于路徑跟蹤控制以及一致性算法來設計編隊控制策略, 以實現復雜海況中編隊的協同控制, 但并未考慮航行器個體之間通信時延和編隊通信拓撲切換等因素對編隊協同控制的影響。Wang等[10]設計了一種分布式控制律, 通過路徑參數設計一致性算法, 使各航行器在跟蹤上幾何路徑的同時保持期望的編隊隊形, 但并未考慮海流干擾和參數不確定性的影響。
從上述文獻可以看出, 多USV集群協同跟蹤控制研究已取得了一些顯著的成果。文中研究了一種在外界干擾和模型不確定情況下的無人艇集群協同目標包圍控制方法。將視線(line-of-sight, LOS)制導與基于一致性協議的協同方法結合, 以保證無人艇集群能在圓曲線上均勻分布。利用積分滑模面設計動力學控制器對縱向推力以及轉艏力矩進行控制, 使各無人艇快速穩定跟蹤期望路徑。考慮了實際環境中存在的外界干擾以及模型不確定性, 利用徑向基函數(radial basis function, RBF)神經網絡的逼近特性來逼近未知非線性項, 提高控制精度及系統抗干擾能力。
1 問題陳述
1.1 USV模型

和
考慮USV在運動過程中存在漂角, 運動學模型可表示為

式中: 表示第艘USV的實際航行方向, 且,其中為漂角; 表示其實際運動速度大小。

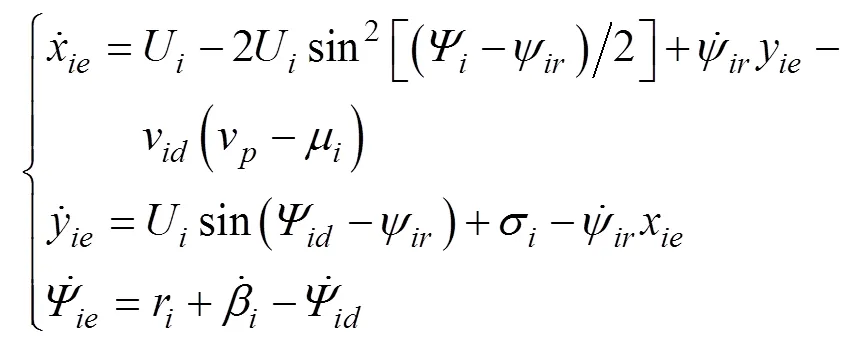
對上式求導并將式(3)代入可得誤差動態方程

1.2 控制目標

1) 路徑跟蹤控制目標
2) 參數協同控制目標

在運動學層次, 基于LOS制導方法設計期望速度和角速度, 并結合一致性協議設計路徑參數協同算法; 在動力學層次, 設計分布式速度控制器和角速度控制器, 驅動無人艇跟蹤期望路徑, 實現編隊目標包圍。
2 控制器設計及穩定性分析
2.1 制導律設計
將上式代入式(6), 路徑跟蹤誤差方程可改寫為
航向制導角

將式(12)代入誤差動態方程可得
2.2 一致性協議


則
每艘動態的USV都滿足動力學特性
當且僅當每艘USV都滿足協議

為使路徑參數均勻分布, 設計基于相鄰USV信息的路徑參數更新律[14], 定義參數協同誤差為
設計更新律為

建立如下Lyapunov函數
對式(22)求導, 并將式(21)代入可得
2.3 動力學控制器設計
USV在運動中會受到很多不確定性的影響, 包括自身模型存在較強的非線性和不確定性, 以及外界環境干擾。因此, 利用RBF神經網絡快速逼近非線性函數的特性, 設計網絡權重和實際控制律, 對模型不確定因素以及外界干擾在線估計。
考慮模型不確定及外界干擾, 動力學模型(1)可改寫為
定義縱向速度及艏向角積分滑模面為

對上式求導得
為了消除抖振, 選取指數趨近律為
根據式(27)~式(29), 設計縱向速度和艏向角控制律為
將RBF神經網絡逼近算法代入自適應控制器中, 可得控制律為
設計自適應律為
縱向速度與艏向角度誤差為
RBF神經網絡估計誤差為
將式(34)代入式(24), 則閉環系統可表示為

定義神經網絡逼近誤差

則式(38)可改寫為

將式(31)代入式(38)可得
構建如下Lyapunov函數
對上式求導并將自適應律代入可得
將式(41)代入上式可得
根據式(28)可得
已知自適應律為式(35), 代入上式可得

3 仿真試驗

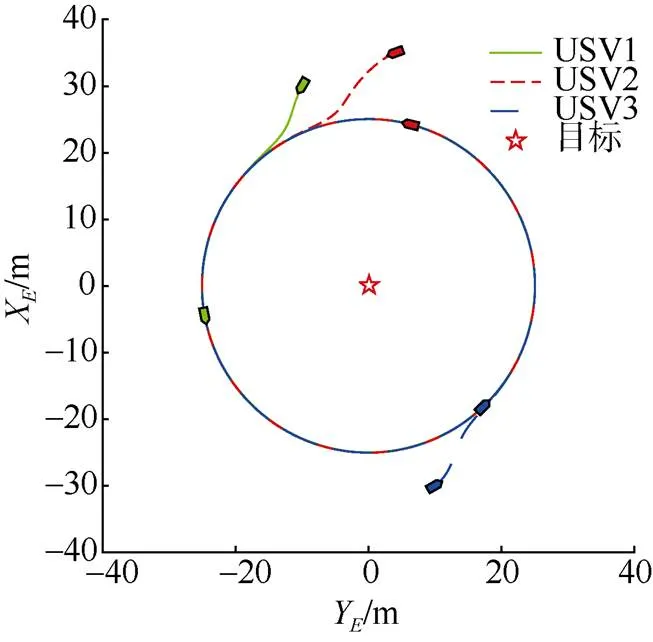
圖3 協同目標包圍仿真圖
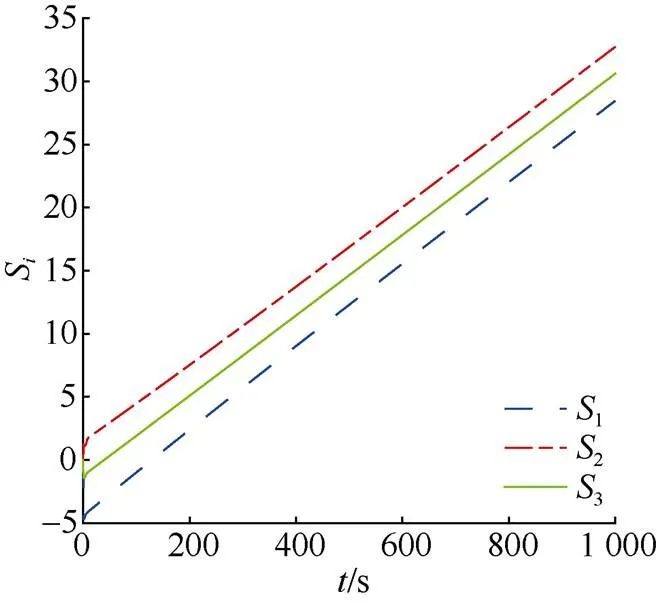
圖4 無人艇路徑參數曲線
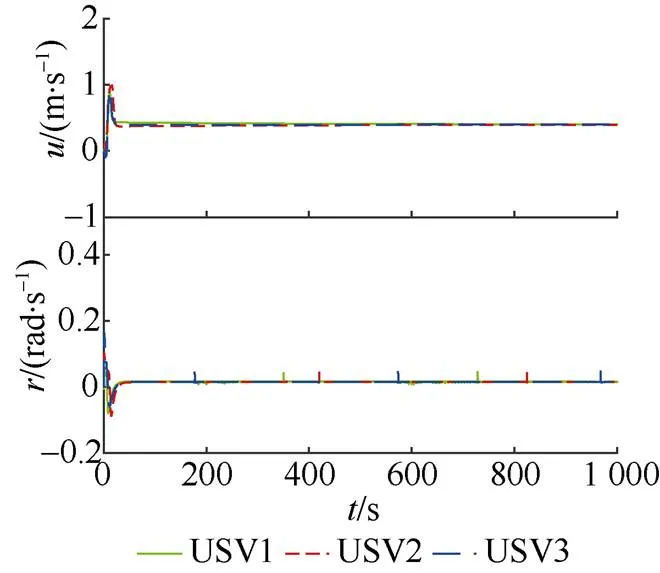
圖5 縱向速度與轉艏角速度曲線
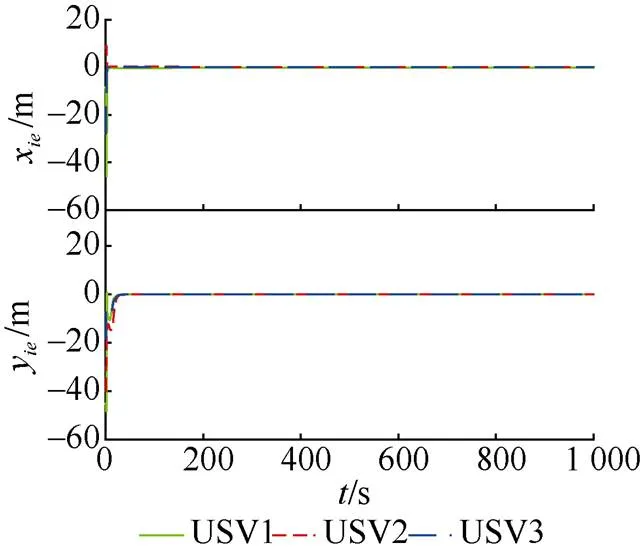
圖6 跟蹤誤差曲線
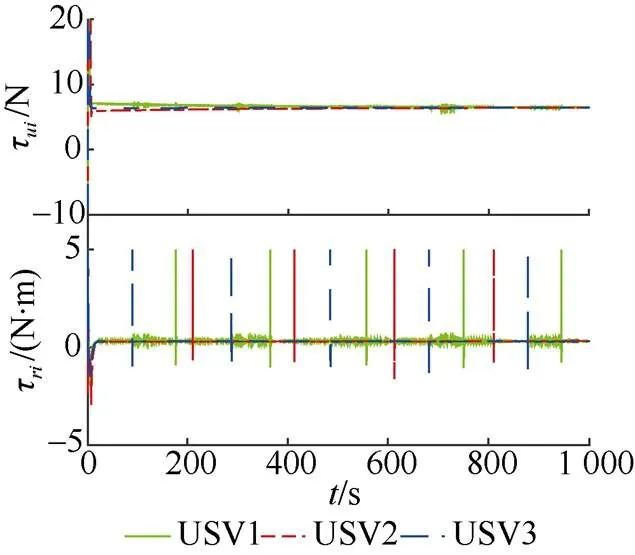
圖7 縱向推力與轉艏力矩響應曲線
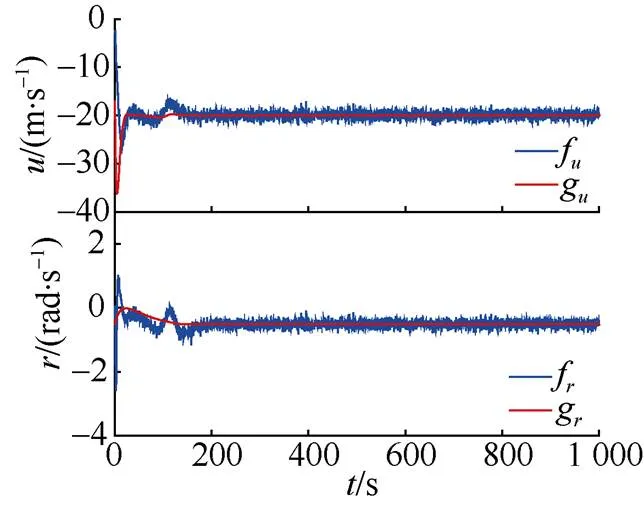
圖8 未知非線性項估計
4 結束語
文中研究了一種在外界干擾和模型不確定情況下的無人艇集群協同目標包圍控制方法。與現有研究方法相比, 文中方法具有以下優點:
1) 將LOS制導與一致性算法相結合提出了協同LOS制導律, 實現多USV集群協同路徑跟蹤;
2) 文中針對目標圍捕等實際應用采用一種路徑參數循環跟蹤的方法實現閉曲線上對稱的編隊隊形;
3) 文中設計的分布式積分滑模控制器能有效減弱系統抖振, 提高系統的抗干擾性和路徑跟蹤精度。
Lyapunov穩定性理論證明了閉環系統的穩定性, 仿真試驗驗證了協同控制器的有效性。未來將就各無人艇通信中存在的時延和無人艇集群拓撲變換等問題進行研究, 使之具有更廣泛的工程應用意義。
[1] Edwards D B, Bean T A, Odell D L, et al. A Leader-Follower Algorithm for Multiple AUV Formations[C]// Gertrude Castellow Ford Center in Oxford USA IEEE/ OES Autonomous Underwater Vehicles. Oxford: IEEE, 2004: 40-46.
[2] Lee G, Chwa D. Decentralized Behavior-based Formation Control of Multiple Robots Considering Obstacle Avoidance[J]. Intelligent Service Robotics, 2018(11): 127-138.
[3] Kwak J H, Kang H D, Kim C H. The Formation-keeping of Multiple Mobile Robots Using Chained-poles[C]//Fukuoka Japan: ICROS-SICE International Joint Conference, 2009: 5695-5698.
[4] Jie J, Khajepour A, Melek W W, et al. Path Planning and Tracking for Robot Collision Avoidance Based on Model Predictive Control With Multiconstraints[J]. IEEE Transactions on Vehicular Technology, 2017(66): 952-964.
[5] Ghommam J, Mnif F. Coordinated Path-Following Control for a Group of Underactuated Surface Vessels[J]. IEEE Transactions on Industrial Electronics, 2009, 56(10): 3951-3963.
[6] Hong Y G, Hu J P, Gao L X. Tracking Control of Multi-agent Consensus with an Active Leader and Variable Topology[J]. Automatica, 2006, 42(7): 1177-1182.
[7] 李蕓, 肖英杰. 領航跟隨法和勢函數組合的船舶編隊控制[J]. 控制理論與應用, 2016, 33(9): 1259-1264.
Li Yun, Xiao Ying-jie. Combination of Leader-follower Method and Potential Function about Ship Formation Control[J]. Control Theory & Applications, 2016, 33(9): 1259-1264.
[8] Marasco A J, Givigi S N, Rabbath C A. Model Predictive Control for the Dynamic Encirclement of a Target[C]//American Control Conference. Montreal, Canada: IEEE, 2012: 2004-2009.
[9] 肖瑞武, 孫洪飛. 欠驅動水下航行器編隊協同控制[J]. 集美大學學報(自然科學版), 2015, 20(6): 428-434.
Xiao Rui-wu, Sun Hong-fei. Coordinated Control over Formation of Under-actuated Underwater Vehicles[J]. Journal of Jimei University (Natural Science), 2015, 20(6): 428-434.
[10] Wang Y, Yan W, Huang Y, et al. Path Parameters Consensus Based Formation Control of Multiple Autonomous Underwater Vehicles in the Presence of Ocean Currents[C]//17th International Conference on Methods and Models in Automation and Robotics. Miedzyzdroje, Poland: MMAR, 2012: 427-432.
[11] Liang X, Qu X R, Hou Y H, et al. Distributed Coordinated Tracking Control of Multiple Unmanned Surface Vehicles under Complex Marine Environments[J]. Ocean Engineering, 2020(205): 1-9.
[12] 張先迪, 李正良. 圖論及應用[M]. 北京: 高等教育出版社, 2008.
[13] 段敏. 多智能體系統分布式包圍控制[D]. 重慶: 重慶大學, 2015.
[14] Olfati-Saber R, Murray R M. Consensus Problems in Networks of Agents with Switching Topology and Time-delays[J]. IEEE Transactions on Automatic Control, 2004, 49(9): 1520-1533.
[15] Liang X, Qu X R, Wang N, et al. A Novel Distributed and Self-Organized Swarm Control Framework for Underactuated Unmanned Marine Vehicles[J]. IEEE Access, 2019, 7: 112703-112712.
[16] Liang X, Qu X R, Wang N, et al. Swarm Control with Collision Avoidance for Multiple Underactuated Surface Vehicles[J]. Ocean Engineering, 2019, 191: 1-10.
[17] Liang X, Qu X R, Hou Y H, et al. Finite-time Sideslip Observer-based Synchronized Path-following Control of Multiple Unmanned Underwater Vehicles[J]. Ocean Engineering, 2020, 205: 107941
1. 徐鵬程, 曾慶軍, 陳堯偉, 等. 基于導管螺旋槳負載的ROV推進器滑模控制[J]. 水下無人系統學報, 2020, 28(5).
2. 王香, 張永林. 基于RBF神經網絡的AUV路徑跟蹤分數階滑模控制[J]. 水下無人系統學報, 2020, 28(3).
3. 霍宇彤, 郭晨, 于浩淼. 欠驅動AUV三維路徑跟蹤RBF神經網絡積分滑模控制[J]. 水下無人系統學報, 2020, 28(2).
4. 姜曉奇, 劉維亭, 魏海峰, 等. 基于全階狀態滑模觀測器的混合永磁記憶電機磁鏈觀測[J]. 水下無人系統學報, 2020, 28(2).
5. 李鑫, 黃茹楠, 丁寧. 輸入受限的自主水下航行器自適應反演控制[J]. 水下無人系統學報, 2019, 27(6).
Collaborative Path Tracking Control Method of USV Cluster Based on RBF Integral Sliding Mode
SHI Wen-yu, LIANG Xiao*, QU Xing-ru, TENG Jian-ping
(School of Naval Architecture and Ocean Engineering, Dalian Maritime University, Dalian 116026, China)
To meet the requirements of ship escorts and target enclosure, a collaborative path tracking control method for underactuated unmanned surface vessel(USV) cluster based on a path parameter cycle is proposed in this study. In a kinematics design that includes line-of-sight guidance and a consistency algorithm, a collaborative guidance law is designed for the USV cluster. This design realizes symmetrical formation on a closed curve and target enclosure. In a dynamics design in which model uncertainties and chattering induced by the traditional sliding mode are considered, a distributed integral sliding mode controller based on an adaptive radial basis function neural network is designed. This distributed integral sliding mode controller uses the approximation characteristics of the neural network and the saturation function to ensure that the USV can track guidance signals accurately, thereby improving the anti-interference of the system and path tracking accuracy. The study also conducts a Lyapunov stability analysis to show that the errors of the closed-loop system are globally asymptotically stable. Simulation results reveal the effectiveness of the proposed collaborative path tracking control method.
unmanned surface vessel(USV); USV cluster; collaborative path tracking; line-of-sight guidance; integral sliding mode; adaptive radial basis function(RBF)
施文煜, 梁霄, 曲星儒, 等. 基于RBF積分滑模的無人艇集群協同路徑跟蹤控制[J]. 水下無人系統學報, 2020, 28(6): 626-633.
TJ630; U675.7; TP273.2
A
2096-3920(2020)06-0626-08
10.11993/j.issn.2096-3920.2020.06.006
2020-09-27;
2020-11-03.
國家自然科學基金資助項目(51879023); 遼寧省興遼英才計劃資助項目(XLYC1907180); 遼寧省自然科學基金資助項目(2019-KF-01-16).
梁 霄(1980-), 男, 教授, 博導, 主要研究方向為無人海洋航行器決策與控制技術.
(責任編輯: 許 妍)
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17