基于特征值靈敏度的D-PMSG并網系統次同步振蕩特性研究
2021-01-13 06:43:48彭志煒
節能技術 2020年5期
田 宇,彭志煒,王 杰,高 勇
(貴州大學 電氣工程學院,貴州 貴陽 550025)
2015年7月,我國新疆哈密地區某個以直驅風電機組為主的風電基地,在無串聯補償的情況下,多次檢測到次同步振蕩現象,嚴重影響電網安全可靠運行,研究表明這是一種新型的次同步振蕩[1-5]。如果沒有完善有效的措施去預防和抑制次同步振蕩,可能會發生嚴重電力安全事故,給國民經濟造成重大損失[6]。因此,學者們對直驅風電機組并網系統次同步振蕩進行了廣泛的研究[7-11]。
在傳統風電機組并網中,常采用阻抗分析法、復轉矩系數法和模態分析法分析系統的次同步振蕩現象[12-20]。針對阻抗分析法,文獻[12]建立了直驅風電機組網側變流器的正、負序阻抗模型,將網側變流器中的鎖相環模塊、前饋控制環節模塊和電流控制模塊視為三個開環子系統,分析(Direct-Drive Permanent Magnet Synchronous Generator,D-PMSG)并網次同步振蕩機理,但阻抗分析法是以模塊化作為影響因素研究次同步振蕩特性,無法深入研究模塊內部的耦合交互作用對次同步振蕩的影響。文獻[13]建立了直流輸電系統的小信號數學模型,通過復轉矩系數法分析了風機并網系統次同步振蕩問題,然而復轉矩系數法主要用于雙饋風機并網系統次同步振蕩的研究,其在弱交流電網下的直驅風機并網系統下的適用性還未得到驗證。目前針對次同步振蕩機理分析方法各異,學者們針對直驅風機次同步振蕩機理的研究還沒有得到統一的結論[14-17]。
文獻[18~19]建立直驅風機與柔性直流輸電系統的小信號模型,通過特征值計算和參與因子分析得到,當并網系統中參數設置不當或者存在小擾動時可能會同時誘發多個次同步振蕩模態。模態分析法是基于準確的數學模型計算方法,通過特征值分析得到振蕩模態的影響因子和影響程度,為次同步振蕩的抑制方案的設計提供了清晰的思路。
在針對風電并網系統次同步振蕩問題研究方法中,特征值分析法具有機理嚴謹清晰,物理意義明確等明顯優點[20]。本文采用特征值靈敏度分析方法對直驅風電并網系統次同步振蕩問題展開研究,首先基于模態分析法,建立直驅風電并網系統數學建模。在建模時考慮了直驅永磁同步發電機組參數、風機側換流器控制參數、網側換流器控制參數、鎖相環控制參數(Phase-Locked Loop,PLL)和并網線路參數對次同步振蕩的影響,建立了更加完整的直驅風機模型。然后分析了系統振蕩模態的特征值和參與因子以及特征值的靈敏度,得到參與因子對次同步振蕩模態的影響趨勢和影響程度,最后,根據特征值法分析主要控制參數對次同步振蕩模態特性的影響。
1 直驅風電并網系統建模與分析
1.1 直驅風電并網系統結構
基于特征值分析法[21-22],本節以直驅風電并網系統為研究對象,建立直驅風機并網模型,得出PMSG并網結構圖如圖1所示。
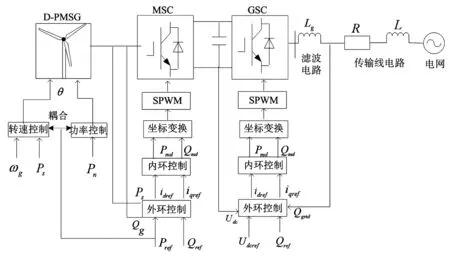
圖1 直驅風機并網結構示意圖
分析圖1可知,直驅風機并網系統由直驅風機D-PMSG原理圖風力機、永磁同步發電機、機側變換器及其控制系統、網側變換器及其控制系統及并網線路等組成。
1.2 風力機軸系模型
直驅風機雙質量軸系模型
(1)
在式(1)軸系模型中,“1”和“2”分別表示發電機和風力機的電氣量,M1、M2分別表示發電機轉子和風力機的轉動慣量,ω1、ω2分別表示發電機和風力機的轉速,K表示軸系的剛度系數,T1、T2分別表示發電機電磁轉矩和風力機機械轉矩,上式中θ1、θ2分別為風力機與發電機轉子相對于額定電氣轉速下同步旋轉參考軸的電氣角位移,ω0表示發電機的同步轉矩,D11、D22、D12分別表示發電機轉子的自阻尼、風力機的自阻尼系數和互阻尼系數。
1.3 直驅永磁同步發電機模型
直驅永磁同步發電機在d、q兩項旋轉同步坐標系下定子電壓方程為
(2)
式中ψf——轉子永磁體的磁鏈;
Ld、Lq——發電機定子線圈的d軸和q軸電感;
Rs——定子電阻;
usd和usq——發電機端定子電壓的d軸和q軸分量;
isd和isq——發電機定子的d軸和q軸電流;
ωr——發電機轉子的電氣角速度。
同步發電機建模通常可以忽略定子暫態,則同步發電機電磁轉矩方程可表示為
Te=1.5npψfisq
(3)
1.4 直驅永磁風機換流器數學模型
(1)機側換流器模型
將旋轉坐標系q軸定位于電機轉子磁鏈上,采用矢量控制技術實現有功和無功的解耦控制,可得到機側控制器的數學模型為
(4)
式中,為了更簡潔的列出機側控制器數學模型,引入x1、x2、x3為中間狀態變量,表示參考值與實際值的誤差積分;Kp1、Kp2、Kp3為機側變流器PI調節器比例系數,Ki1、Ki2、Ki3為調節器積分系數。
(2)網側換流器模型
將網側d、q旋轉坐標系的d軸定位于電壓矢量ug上,可得到網側控制器數學模型為
(5)
式中,為了更簡潔的列出網側控制器數學模型,可引入x4、x5、x6為中間狀態變量,表示參考值與實際值的誤差積分;Kp4、Kp5、Kp6為網側變流器PI調節器比例系數,Ki4、Ki5、Ki6為PI調節器積分系數。
(3)鎖相環模型
以直驅發電機組與電網系統連接點電壓ug為基準設定d、q旋轉坐標系,ug的q軸分量作為pll的輸入,可得到鎖相環模型為
(6)
Kp-pll、Ki-pll分別為pll控制器中的比例系數和積分系數。
1.5 直流環節及并網線路模型
忽略全功率變換器的損耗,當直流電容電壓保持恒定時,則直流側電壓方程可表示為
(7)
PMSG風電機組通過輸電線連接至交流電網,在d、q坐標下,直驅風機與交流電網之間的聯系方程為
(8)
式中u——電網的電壓,通常情況下,u幅值為1;
R——傳輸線路電阻;
L——傳輸線路電感;
i——傳輸線電流。
1.6 全系統的線性化動態模型
直驅風機并網系統數學模型在穩態點線性化,從而得到各部分的線性化模型。全系統的狀態變量X和代數變量Y分別為
(9)
由式(9)得系統矩陣可表示為式(10)
(10)
其中,中間變量代表直驅風力機機側換流器和網側換流器控制參數,A1、B1、C1為狀態方程的系數矩陣,與系統參數、網絡參數和初始狀態相關,消去運行變量Y,得到系統的狀態矩陣為
A=A1+B1C1
(11)
綜上所述,系統狀態矩陣A包含了直驅風電并網系統的各個參數,通過改變系統參數就可以改變狀態矩陣A,從而影響系統特征值。
2 特征值分析方法
2.1 特征值
在動態條件下電力系統的模型為
(12)
根據Lyapunov第一定理將模型在某一穩態運行點線性化,可得

(13)
在忽略展開式中的高階無窮下量hΔx后,式(13)變化為
(14)
由式(14)可得到系數雅克比矩陣A,由此可以推出矩陣A的特征方程
|λI-A|=0
(15)
求解特征方程得到系統特征值,設特征值λi=σi+jωi。其中,若ωi=0,系統特征值λi為純實數,系統沒有相應的振蕩模態,則系統不會振蕩;若ωi≠0,系統存在共軛復根,此時ωi可以反應出系統振蕩頻率,σi可以反應出系統阻尼強度。式(16)為阻尼比定義,阻尼比可以衡量系統阻尼強度
(16)
2.2 參與因子
將式(15)得到的特征根記作λ1,λ2,…,λn。對任意一特征值λi,可得方程
AUi=λiUii=1,2,…,n
(17)
滿足此方程的向量Ui叫做矩陣A的右特征向量。同理,可得方程
(18)
滿足此方程的向量Vi叫做矩陣A的左特征向量。此時引入參與矩陣P,將其定義為式(19)和式(20)
(19)
(20)
其中,Pi=Pki=UkiVki稱為參與因子,在特征值分析中,可用參與因子來衡量狀態變量與振蕩模態之間的相關性,它是一個沒有量綱的數值。
2.3 特征值靈敏度
將系統狀態矩陣表示成電力系統控制器參數和運行參數的函數,即
Ai=Ai(α1,α2,…αl)
(21)
其中,α1,α2,…αl是l個控制器參數和運行參數,則可將式(17)改寫為式(22)
A(α)Ui=λiUii=1,2,…,n
(22)
Ui和λi均為α的函數,進一步將式(22)對α求導得
(23)
(24)
特征值靈敏度的通常是一個復數,幅值表示參與因子對特征值大小的影響,相位表示參與因子對特征值改變方向的影響。
3 直驅風電并網系統影響因素的特征值靈敏度分析
3.1 特征值計算和參與因子分析
本文選取額定容量為2 MW的直驅風電機組進行計算與分析,該機組由300臺風機并網運行,輸電線路電阻為0.234 7 p.u.,輸電線路電感為0.446 9 p.u.,變壓器漏感為0.050 0 p.u.,電網強度SCR的值為1.82。則特征值計算得到結果如表1所示。

表1 直驅風電并網系統特征值計算結果
根據小信號分析得,模態1的阻尼比較大,所以此模態為振蕩收斂。而模態2阻尼比為負數,此模態為振蕩發散。
進一步得到系統輸出功率的頻譜分析如圖2所示。
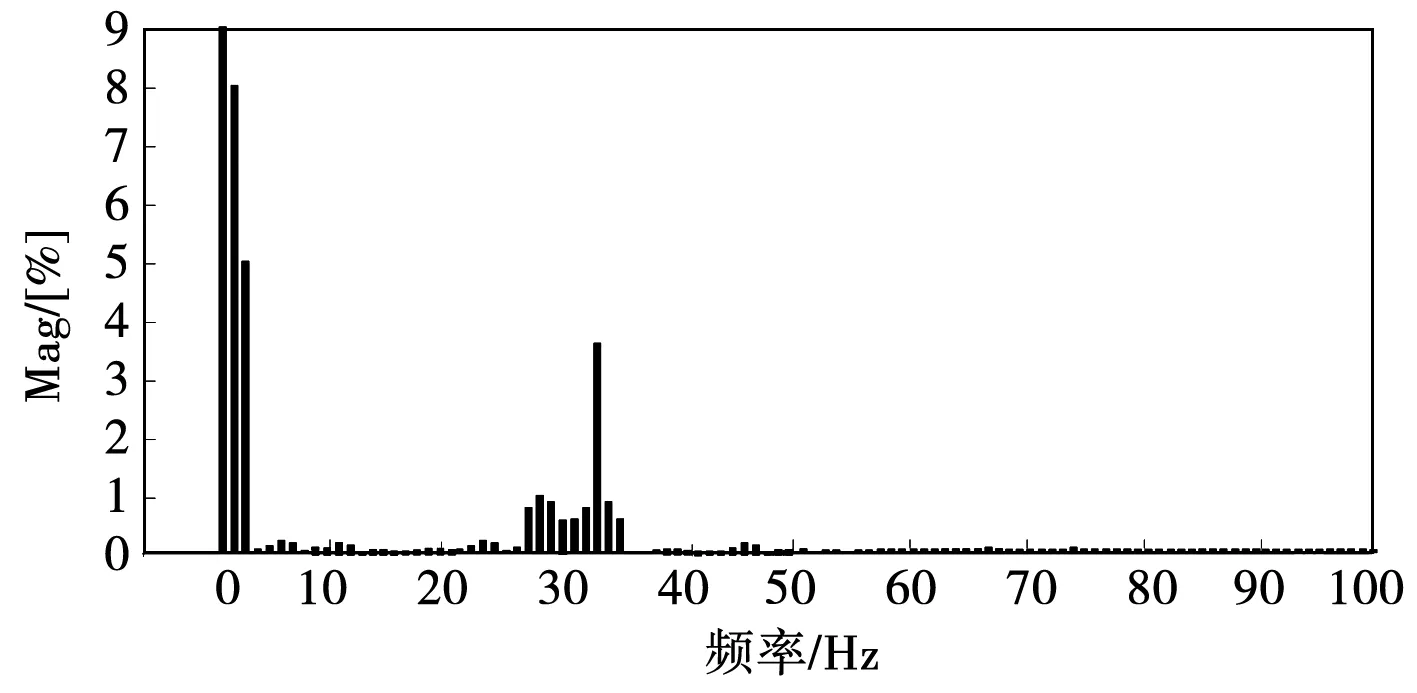
圖2 SCR=1.82時風機輸出功率頻譜分析
分析該圖可以得到,系統頻率出現為32 Hz左右的次同步振蕩頻率,與上述分析結果一致。
進一步分析系數矩陣,可得到對次同步振蕩模態產生的參與因子,其計算結果如表2所示。
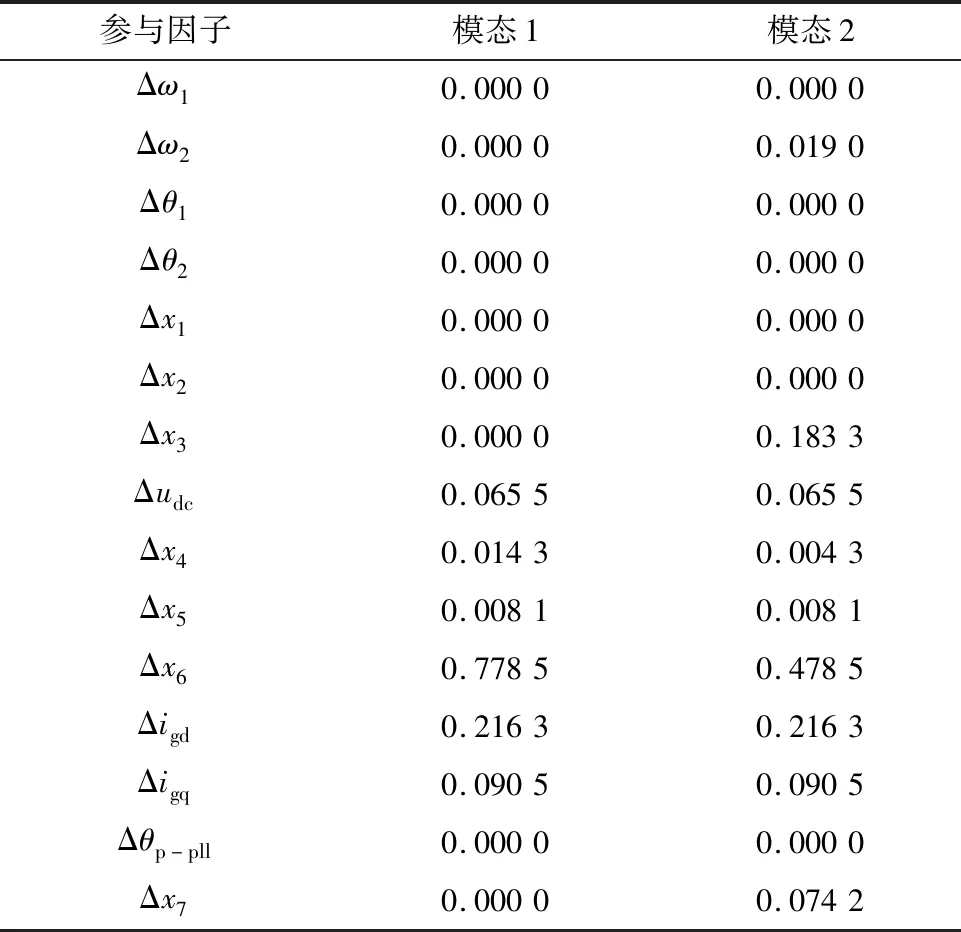
表2 參與因子計算結果
由表2可知,振蕩模態1的參與因子主要是:直流環節、網側控制器參數和并網線路參數,其中網側控制器參數和直流環節參與因子較大;振蕩模態2參與因子主要有:直驅風機本身、機側控制器參數、直流環節、網側控制器參數和鎖相環控制參數。綜上分析可知,振蕩模態是由直驅風電并網系統中的多個系統參數共同導致,多個系統參數的共同作用也可能導致次同步振蕩的發生。
3.2 特征值靈敏度計算
根據本文所建立的系統模型,計算參數變化時的特征值靈敏度大小,其結果如表3所示。
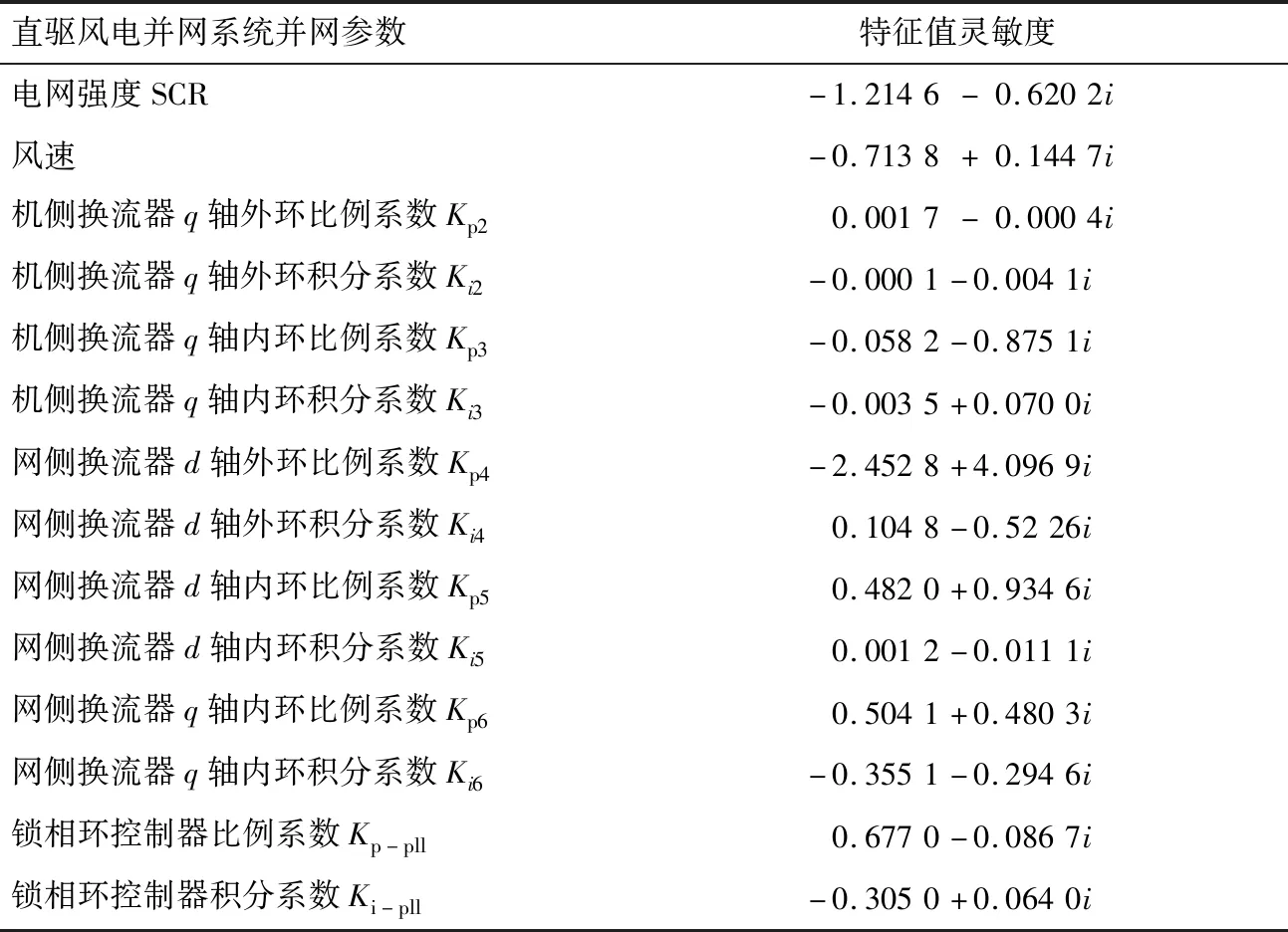
表3 特征值靈敏度計算結果
對表3所得到的特征值靈敏度計算結果分析如下:
(1)電網強度變化時,特征值靈敏度實部為負,虛部為負,表示隨著電網強度增大,系統次同步振蕩向穩定性增強方向移動,系統頻率減小。
(2)風速變化時,特征值靈敏度實部為負,虛部為正,表示隨著風速增加,系統次同步振蕩向穩定性增強方向移動,系統頻率增大。
(3))機側換流器參數變化時,q軸外環比例系數Kp2特征值靈敏度實部為正,表示隨著參數增大,系統次同步振蕩向穩定性減弱方向移動;q軸外環積分系數Ki2、q軸內環比例系數Kp3、q軸內環積分系數Ki3特征值靈敏度實部為負,隨著參數增大,系統次同步振蕩向穩定性增強方向移動;Kp2、Ki2、Kp3特征值靈敏度虛部為負,表示當參數增大時,系統頻率增大;Ki3特征值靈敏度虛部為正,表示當參數增大時,系統頻率減小。
(4)網側換流器參數變化時,d軸外環比例系數Kp4、q軸內環積分系數Ki6特征值靈敏度實部為負,表示隨著Kp4、Ki6數值增大,系統特征值實部減小,阻尼比增大,系統次同步振蕩向穩定性增強方向移動;d軸外環積分系數Ki4、d軸內環比例系數Kp5、d軸內環積分系數Ki5、q軸內環比例系數Kp6特征值靈敏度實部為正,隨著Ki4、Kp5、Ki5、Kp6數值增大,系統特征值實部增大,系統次同步振蕩向穩定性減弱方向移動;Kp4、Kp5、Kp6特征值靈敏度虛部為正,表示當Kp4、Kp5、Kp6增大時,系統頻率增大;Ki4、Ki5、Ki6特征值靈敏度虛部為負,表示當Ki4、Ki5、Ki6增大時,系統頻率減小。
(5)鎖相環參數變化時,控制器比例系數Kp-pll特征值靈敏度實部為正,隨著Kp-pll增大,系統特征值實部增大,阻尼比減小,系統在次同步振蕩模式下向穩定性減弱方向移動;特征值靈敏度虛部為負,隨著Kp-pll增大,系統頻率減小;控制器積分系數Ki-pll特征值靈敏度實部為負,隨著Ki-pll增大,特征值實部減小,阻尼比增大,系統在次同步振蕩模式下向穩定性增強方向移動;特征值靈敏度虛部為正,隨著Ki-pll增大,系統頻率增大。
4 仿真分析驗證
為了進一步分析交流電網強度、風速以及風機控制系統對直驅風電并網系統次同步振蕩的影響,在PSCAD/EMTDC仿真軟件上直驅風電并網系統的仿真模型,參數設置和求解系統特征值參數時一致。仿真模型如圖3所示,其中風速模塊用于改變風速大小,PI線路模塊可用于改變交流電網的強度。
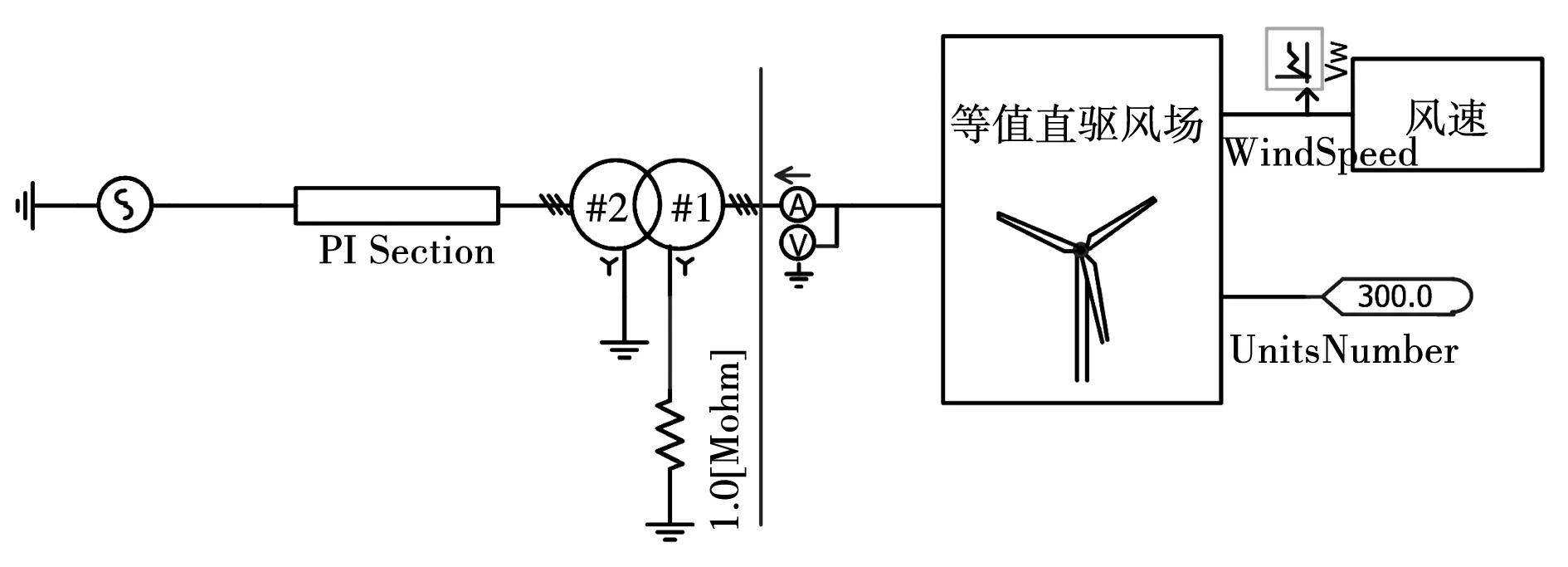
圖3 直驅風電并網系統仿真模型圖
4.1 電網強度仿真分析
為了研究交流電網強度對直驅風電并網系統次同步振蕩的影響程度,本文以研究當電網強度SCR值由1.82逐漸增加到至7.87時為例進行仿真實驗與分析,在系統仿真模型中,設置在時間為6 s時對風速添加小擾動,可得到不同電網強度下的風機a相輸出電流如圖4所示。
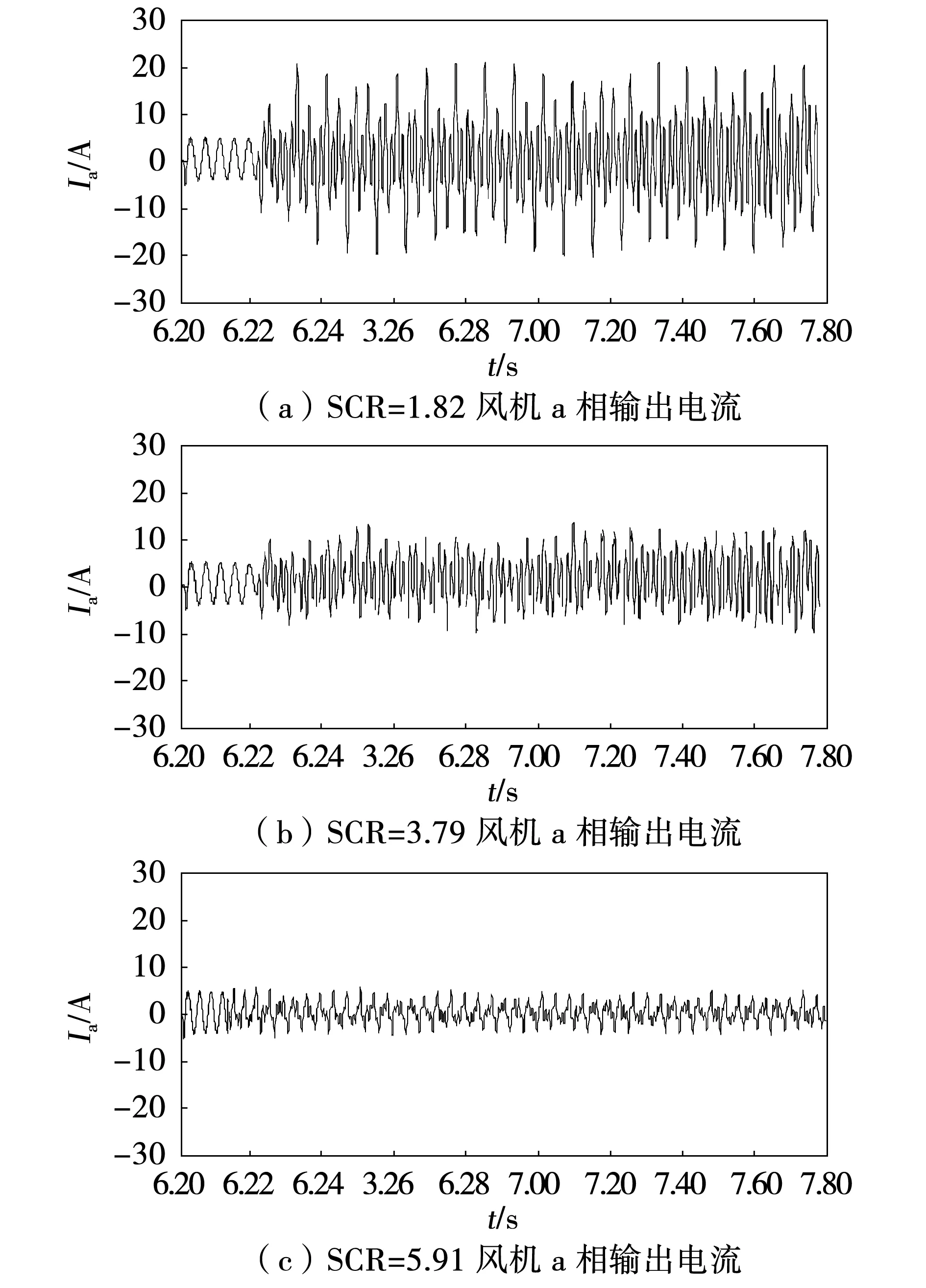
圖4 不同電網強度下風機a相輸出電流
分析圖4得知,當風速降低時系統出現次同步振蕩,隨著電網強度SCR從1.82增加到5.91,系統振蕩幅度減小。結合特征值靈敏度分析可知,在直驅風電并網系統中,當交流電網為弱電網時容易發生不穩定的次同步振蕩。不利于風電機組的穩定并網,電網強度增加,系統發生振蕩的可能性減小,系統穩定性提高。
4.2 風速影響分析
為了研究風速對直驅風電并網系統次同步振蕩的影響程度,在仿真模型中,設置時間為3 s時,風速的變化分別為:8 m/s→5 m/s、8 m/s→6 m/s、8 m/s→7 m/s,可得到如圖5所示的不同風速下風機輸出a相電流仿真圖像。
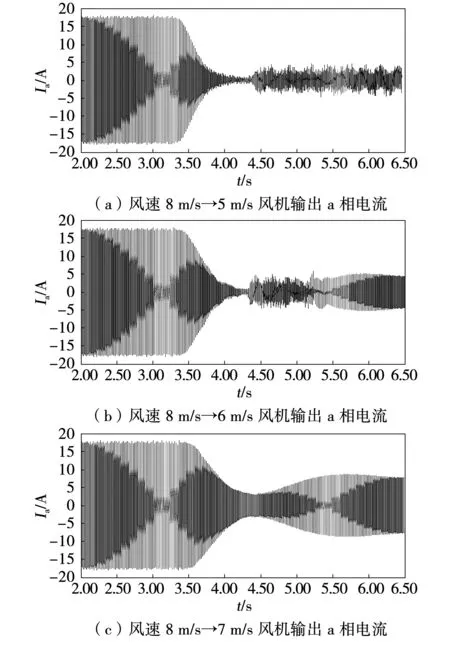
圖5 風速改變時風機a相輸出電流
分析圖5可知,當風速降低時,系統輸出電流較小,出現振蕩,風速較大時,系統振蕩幅度較小。結合特征值靈敏度分析可知,在直驅風電并網系統中,風速過小時容易發生不穩定的次同步振蕩,不利于風電機組的穩定并網,風速增加,系統發生振蕩的可能性減小,系統穩定性提高。
4.3 換流器參數影響分析
為了研究機側換流器參數對直驅風電并網系統次同步振蕩的影響程度,在仿真模型中,在設置時間為3 s時,設置機側換流器參數分別為0.2、2.5和5.5,可得到如圖6所示的不同Kp2下風機輸出a相電流仿真圖像。
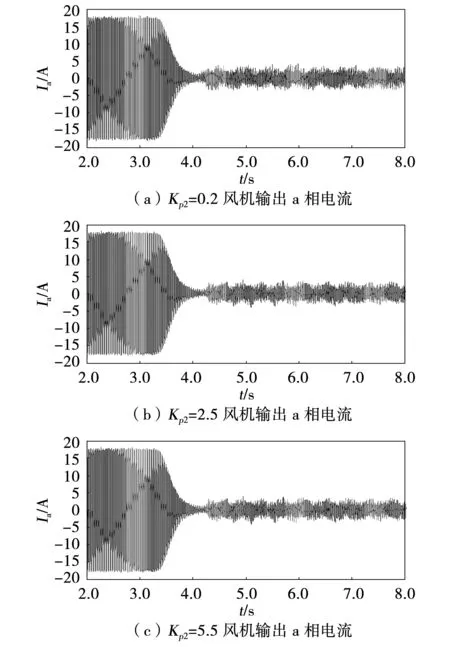
圖6 不同Kp2下風機a相輸出電流
分析圖6可得,隨著比例系數Kp2的增大,系統會發生次同步振蕩,但振蕩幅值變化較小。結合特征值靈敏度分析可知,在直驅風電并網系統中,風機側換流器q軸外環比例系數Kp2對次同步振蕩模態影響較小,當發生次同步振蕩時,調節Kp2參數的作用有限。
為了研究網側換流器參數對直驅風電并網系統次同步振蕩的影響程度,在仿真模型中,設置網側控制器參數改變換流器的參數Kp5為0.2、2.5和5.5,可得到如圖7所示的不同Kp5下風機輸出a相電流仿真圖像。
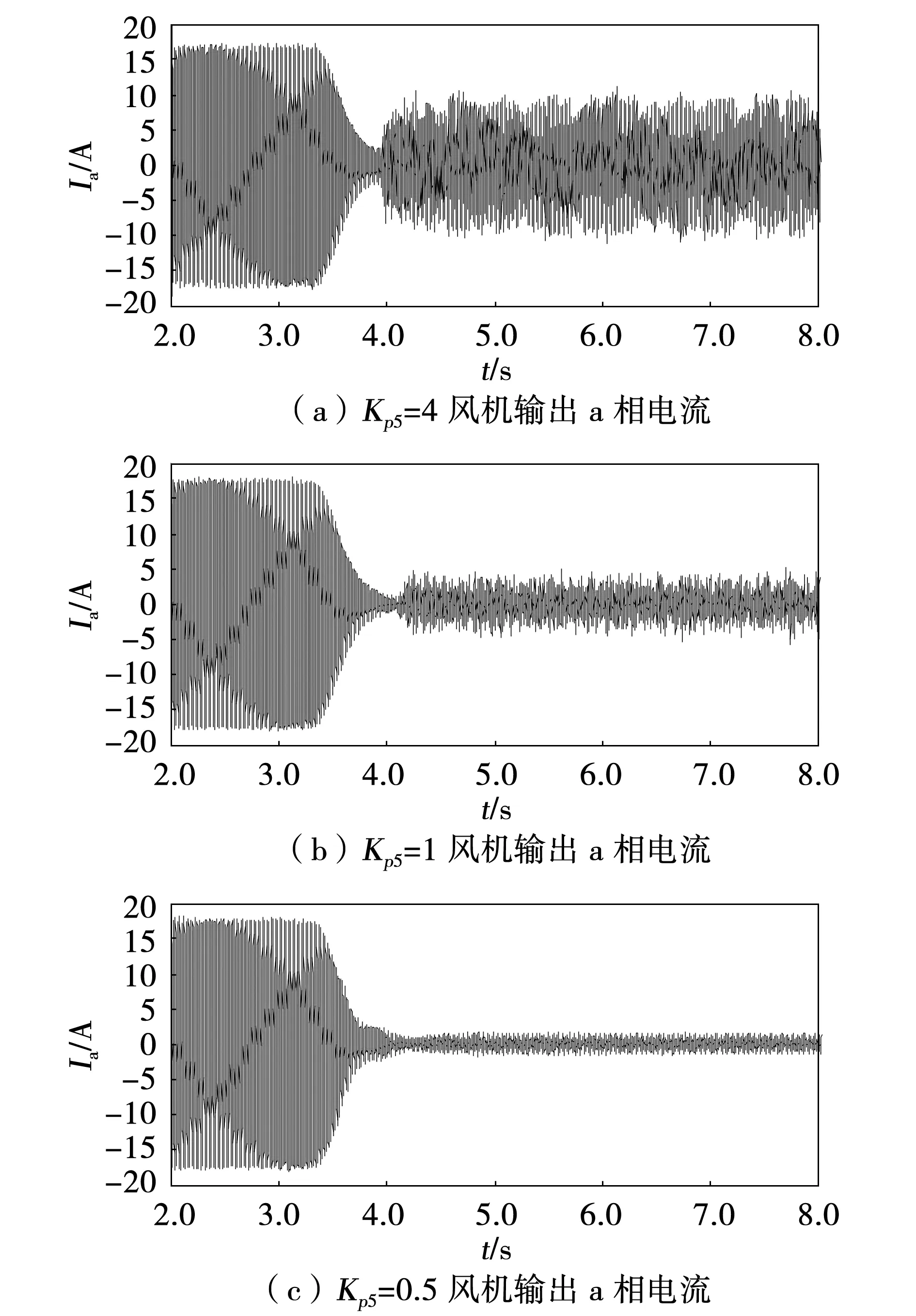
圖7 不同Kp5下風機a相輸出電流
分析圖7可知,隨著比例系數Kp5的增大,系統會發生次同步振蕩,且比例系數Kp5越大,振蕩幅值越大。可見,在直驅風電并網系統中,風機網側有功內環控制器比例系數Kp5太大時容易發生不穩定的次同步振蕩,適當減小比例系數的值,有利于風電機組的穩定并網。
5 結語
本文采用特征值分析法分析直驅風電并網系統次同步振蕩問題。通過建立完整系統模型,并求解系統的振蕩模態的特征值和參與因子,得到與次同步振蕩模態相關的系統參數。進而對特征值靈敏度進行計算分析,得到各參與因子對次同步振蕩模態的趨勢影響程度。最后,在仿真軟件上搭建仿真模型驗證分析的正確性。綜上研究,本文主要結論如下:
(1)特征值計算結果表明,直驅風電并網系統發生次同步振蕩的原因是:當系統在風速較低情況下并入弱交流電網時,系統出現負阻尼。
(2)對系統特征值靈敏度研究得出,系統中多個控制參數同時對振蕩模態存在影響,且影響趨勢和程度不盡相同。
(3)參與因子中,直流環節的直流電壓和網側控制器參數的特征值靈敏度數值最大,說明其對振蕩模態的影響最大。其次是電網強度、風機自身參數、鎖相環控制參數和機側控制器參數。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機學院學報(2015年4期)2015-02-28 14:30:00