基于激光掃描的火箭對接裝配測量及調(diào)整技術(shù)
2021-01-13 07:40:02朱艷妮吳華陽陳寶有張學(xué)偉
宇航計測技術(shù) 2020年6期
關(guān)鍵詞:測量
王 津 朱艷妮 吳華陽 陳寶有 張學(xué)偉 崔 蘊
(1.天津航天長征火箭制造有限公司,天津 300462;2.中國人民解放軍空軍指揮學(xué)院,北京 100089;
3.北京航天計量測試技術(shù)研究所,北京 100076)
1 引 言
運載火箭是一種將人造衛(wèi)星,載人飛船,空間站,空間探測器等有效載荷送入預(yù)定軌道的航天運輸工具[1]。在航天制造業(yè)中,運載火箭這種大型航天器均是采用分段制造,整體裝配的方法進行制造,所以裝配精度決定最終火箭質(zhì)量[2]。
火箭總裝方式主要分為水平總裝和垂直總裝兩種方式,垂直裝配主要通過吊裝的方式進行對接,具有垂直度易于校正的優(yōu)點。水平裝配則全程需要輔助工裝進行火箭的定位與固定,通過調(diào)整工裝姿態(tài)來實現(xiàn)部段對接。美國和俄羅斯作為世界航天技術(shù)的領(lǐng)頭羊,無論是水平裝配還是垂直裝配均已實現(xiàn)自動化,通過現(xiàn)代化檢測測量手段配合姿態(tài)調(diào)節(jié)裝置完成[3]。國內(nèi)火箭總裝主要學(xué)習(xí)俄羅斯的水平裝配方式,目前自動化程度較低,主要通過多人同步旋轉(zhuǎn)支撐架車手輪,調(diào)整支撐架車姿態(tài),進而調(diào)整箭體姿態(tài)實現(xiàn)對接操作。
現(xiàn)代化測量手段是火箭自動裝配的基礎(chǔ),是實現(xiàn)精確裝配、完成設(shè)計技術(shù)指標的首要前提。三維位置姿態(tài)測量方法主要包括經(jīng)緯儀測量,室內(nèi)GPS測量,激光跟蹤儀測量和激光掃描測量。經(jīng)緯儀測量系統(tǒng)采用合作目標的方式,需要人工瞄準靶標,測量效率低。室內(nèi)GPS需要放置多組發(fā)射器于廠房內(nèi),標定后需固定多個接收器于產(chǎn)品上,安裝定位困難。激光跟蹤儀是實現(xiàn)單點測量,使用靶球跟隨測量位置移動方可測量,效率較低[4]。激光掃描測量為非合作目標方式,分層掃描,高效便捷,適用于總裝廠房內(nèi)的現(xiàn)場測量。本文采用北京航天計量測試技術(shù)研究所自主研發(fā)大尺寸非合作目標三維形貌測量儀來實現(xiàn)數(shù)據(jù)的采集,通過協(xié)調(diào)控制算法驅(qū)動控制機構(gòu)實現(xiàn)精準對接。
2 大尺寸非合作目標三維形貌測量儀介紹
大尺寸非合作目標三維形貌測量儀主要包括激光測距系統(tǒng)、精密伺服三維掃描系統(tǒng)和中央控制系統(tǒng)三部分組成,如圖1所示。激光測距系統(tǒng)的主要功能是發(fā)射激光并對目標距離進行測量。精密伺服三維掃描系統(tǒng)的主要功能是實現(xiàn)大角度范圍的目標精確掃描,并測量目標的方位、俯仰角度信息。中央控制系統(tǒng)負責整機的控制、信息處理以及數(shù)據(jù)解算。
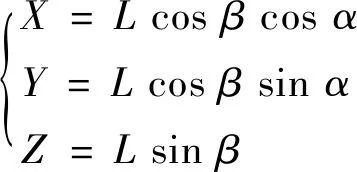
激光測距系統(tǒng)由激光測距裝置、俯仰軸和水平軸組成一個標準的空間球坐標系,設(shè)被測點是此球坐標系下任意一點,通過絕對測距,得到儀器中心到被測點P的距離L,利用水平和俯仰兩個測角碼盤進行水平角α和俯仰角β的同步測量,從而得到被測點P的三維坐標值(L,α,β),如圖2所示。多次反復(fù)測量取平均作為該點的三維坐標測量值。被測點P坐標可表示為
(1)
式中:L——儀器中心到被測點P距離;β——被測點P與XY平面的夾角;α——被測點P在XY平面的投影距離與X方向的夾角。
火箭部段都是薄壁大開口部件,均可用圓柱形來擬合,使用大尺寸非合作目標三維形貌測量儀對待測物件進行掃描,通過測量的點云數(shù)據(jù)擬合待測物件的外形,建立相應(yīng)數(shù)學(xué)模型,可以獲取足夠的高精度測量信息,如實反饋部段的形狀[5]。
3 水平自動對接實現(xiàn)
箭體水平對接主要是實現(xiàn)箱體和殼段的連接操作,在完成箱內(nèi)和殼段內(nèi)的部分總裝操作后,進行對接以便后面的箭體總裝工作,布置測量儀及箭體以實現(xiàn)水平方向的自動對接,如圖3所示。
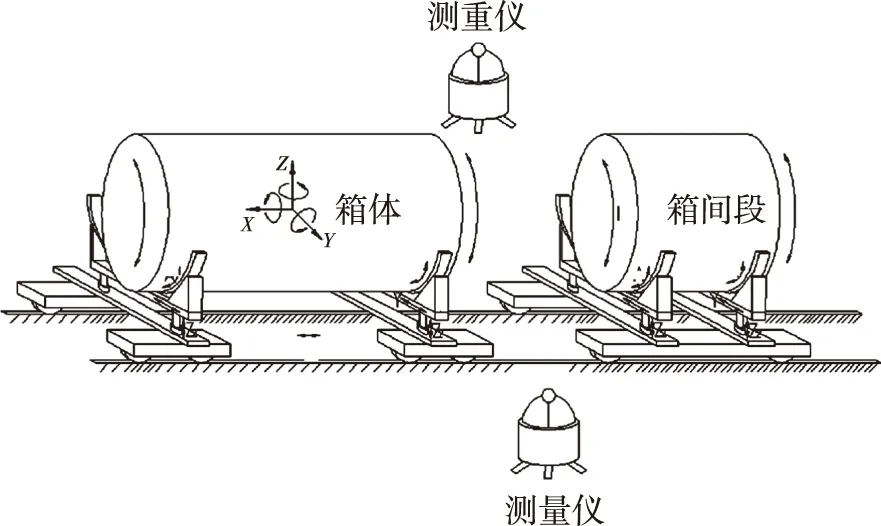
圖3 水平對接系統(tǒng)布置方案Fig.3 Horizontal docking system layout scheme
在布置之前,需要將兩個測量儀所測數(shù)據(jù)融合進同一坐標系下,在箭體尚未推到預(yù)定位置時,固定測量儀。在廠房布置一些基準轉(zhuǎn)換靶標,這些基準轉(zhuǎn)換靶標每三個都不共線。為了提高準確度,在地面和墻面各布置不共線的4個靶標,兩個測量儀均測量這些靶標即可統(tǒng)一進同一坐標系中,最后建立以大地鉛錘方向為Z軸,軌道方向為X軸的坐標系。設(shè)一個測量儀測得的八個點坐標為

A=RB
(2)
式中:R——兩個測量儀測量數(shù)據(jù)轉(zhuǎn)換矩陣。
R可表示為
R=ABT(BBT)-1
(3)
可以求出
(4)
(5)
(6)
第一個測量儀內(nèi)數(shù)據(jù)經(jīng)過一次變換,第二個測量儀內(nèi)數(shù)據(jù)經(jīng)過兩次變換,所測數(shù)據(jù)均轉(zhuǎn)換到鉛垂坐標系內(nèi)。
標定后,將箭體推入預(yù)定位置后,分別測量箱體端框外表面和殼段端框外表面,由于測量的是點云數(shù)據(jù)[6],難免存在粗大誤差,需要將所測數(shù)據(jù)進行最小二乘法擬合圓柱,利用拉依達準則去除粗大誤差后,分別將剩余數(shù)據(jù)進行擬合,計算箱體和殼段的圓柱軸線。再通過調(diào)整支撐架車的控制機構(gòu)調(diào)節(jié)箭體姿態(tài)實現(xiàn)兩部段的軸線統(tǒng)一,支撐架車調(diào)整姿態(tài)原理如圖4所示。
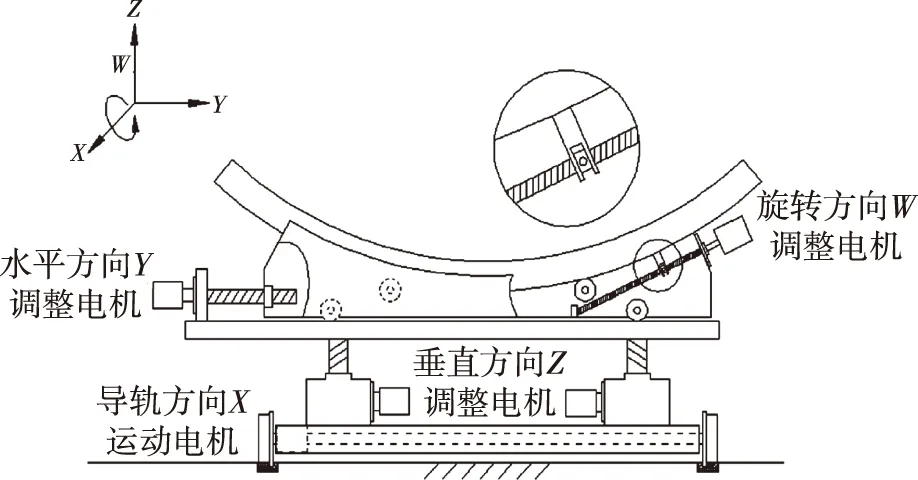
圖4 支撐架車姿態(tài)調(diào)整原理Fig.4 Principle of attitude adjustment of support frame
計算完兩個部段軸線后,通過Y向和Z向調(diào)整電機調(diào)整支撐架車姿態(tài)進而調(diào)整箭體姿態(tài),實現(xiàn)兩個部段的軸線統(tǒng)一,同時盡量實現(xiàn)調(diào)整后的兩個部段支撐電機處于行程的中間位置。姿態(tài)調(diào)整完后,殼段支撐架車的X向電機動作,使得兩部段對接面距離2cm左右后,目測定位銷釘與定位銷孔相對位置,調(diào)整W向電機,實現(xiàn)兩個部段姿態(tài)的完全統(tǒng)一,再動作殼段支撐架車的X向電機完成水平對接。
4 垂直自動對接實現(xiàn)
目前國內(nèi)運載火箭主要采用水平裝配的方式進行總裝,但國內(nèi)某型號的二級和級間段試對過程需要在垂直狀態(tài)進行,而垂直試對過程系統(tǒng)布置如圖5所示。
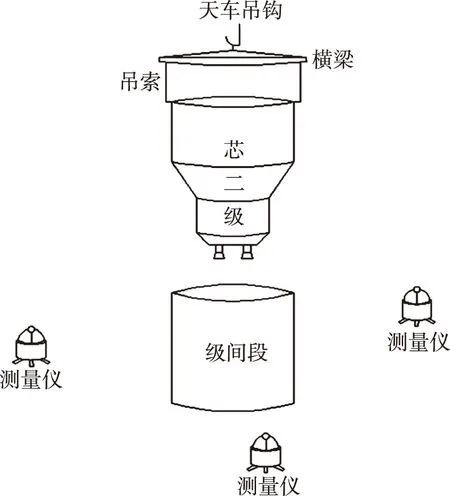
圖5 垂直對接系統(tǒng)布置方案Fig.5 Vertical docking system layout scheme
為了保證測量的級間段準確,需使用三個測量儀所測的端面部分重疊,進而保證最終計算的軸線精準。對接開始前需要將三個測量儀所測數(shù)據(jù)融合進同一坐標系下,同水平對接方法。融合后再分別測量級間段和芯二級的外表面,由于箭體部段加工過程中,對接框區(qū)域精度最高,故芯二級分別選取對接框區(qū)域進行測量,去除粗大誤差后再通過最小二乘法擬合計算出軸線位置,其中級間段為提前固定好,所以通過調(diào)整天車位置實現(xiàn)兩者軸線的統(tǒng)一,由于天車是通過柔性吊索連接芯二級,故需緩慢分段下降落至級間段內(nèi),每次穩(wěn)定后測量保證軸線的統(tǒng)一后再緩慢降落芯二級,直至芯二級與級間段對接完成。
5 對接角度測量誤差分析
三維形貌測量儀在0~50m,水平180°,垂直45°的范圍內(nèi)測量誤差MPE為±(20+20H)μm,H為儀器中心到被測點距離。
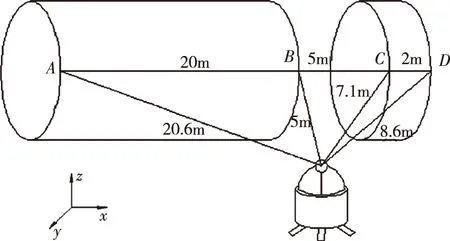
圖6 水平對接示意圖Fig.6 Horizontal docking error analysis
建立對接測量坐標系xyz,其中:x為軸線坐標、z為垂直坐標、y符合右手法則。則箱體與對接軸線夾角的簡化數(shù)學(xué)模型為
(7)
可測筒段最遠端為直徑的一半,最大測量誤差為
ξ=20+20×(H0+0.5D)
(8)
式中:ξ——最大測量誤差;H0——測量儀與測點距離;D——箱體或筒段直徑。
測量儀到A點距離HA為20.6m,筒段直徑D為5m,A點最大測量誤差為
ξA11=20+20×(HA+0.5D)=0.482mm
測量儀與B點距離HB為5m,B點最大測量誤差為
ξB11=20+20×(HB+0.5D)=0.17mm
實際測量時,采用兩個測量儀進行測量,A點擬合最大誤差為
B點擬合最大誤差為
箱體與對接軸線夾角的誤差最大值為
同理,可得筒段上C點與D點最大誤差為
ξC1=0.3mm
ξD1=0.342mm
筒段與對接軸線夾角的誤差最大值為
則水平對接時相對角度誤差最大值為
ψ1=ψ11+ψ12
(9)
ψ1=0.003°+0.018°=0.021°
6 試驗驗證
在某型號發(fā)射場試驗期間,分別采用三維形貌測量儀和激光跟蹤儀在技術(shù)陣地垂直總裝廠房進行了星罩組合體與芯二級垂直對接裝配輔助測量工作,三維形貌測量儀采用掃描方式測量三維點云數(shù)據(jù)并通過軟件獲取節(jié)圓數(shù)據(jù)進行對接角度信息解算,激光跟蹤儀測量相同節(jié)圓并進行對接角度信息解算,測量結(jié)果如表1所示。
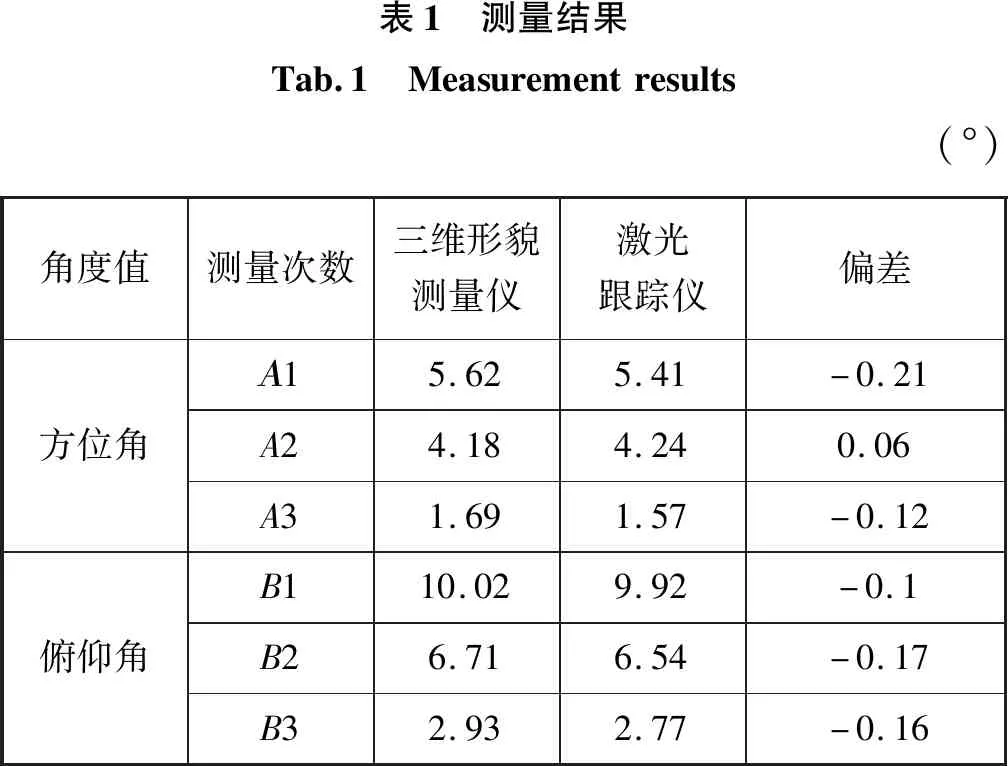
表1 測量結(jié)果Tab.1 Measurementresults(°)角度值測量次數(shù)三維形貌測量儀激光跟蹤儀偏差方位角Α15.625.41-0.21A24.184.240.06A31.691.57-0.12俯仰角B110.029.92-0.1B26.716.54-0.17B32.932.77-0.16

續(xù)表1角度值測量次數(shù)三維形貌測量儀激光跟蹤儀偏差滾轉(zhuǎn)角C11.721.66-0.06C21.391.570.18C30.380.18-0.2
由表1可知,采用兩種方法對對接筒段進行姿態(tài)測量,最大偏差為0.21°,與激光跟蹤儀具有較好的符合性。
7 結(jié)束語
大尺寸非合作目標三維形貌測量儀具有測量精度高、測量速度快,量程大及現(xiàn)場測量等特點,在火箭總裝過程的水平對接和垂直對接過程均使用效果良好,大幅度提高工作效率,降低勞動強度,對其他火箭型號乃至航空船舶等總裝過程有一定借鑒意義。
猜你喜歡
小學(xué)科學(xué)(學(xué)生版)(2021年5期)2021-07-22 02:40:06
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學(xué)少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學(xué)少年(2017年2期)2017-04-26 21:58:43
中學(xué)生數(shù)理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學(xué)低年級版)(2015年4期)2015-04-29 00:00:00
