基于聯合仿真的機電液一體化系統優化設計方法
2021-01-12 01:06:54周建軍
今日自動化 2021年11期
周建軍
[摘? ? 要]在我國工業領域,機電液一體化系統的應用極為廣泛,這類系統的優化設計也屬于業界關注焦點。基于此,文章簡單介紹機電液一體化系統聯合仿真內涵,并圍繞機電液一體化聯合仿真模型建立、智能控制算法分析開展深入研究,結合機電液一體化聯合仿真實例分析可以確定,本文研究在各子系統仿真模型高效集成方面表現突出,能夠為協同分析及設計提供平臺支持。
[關鍵詞]聯合仿真;機電液一體化系統;Simulink
[中圖分類號]TP391.9 [文獻標志碼]A [文章編號]2095–6487(2021)11–00–02
Discussion on Optimization Design Method of Electromechanical
Hydraulic Integration System Based on Joint Simulation
Zhou Jian-jun
[Abstract]In China's industrial field, electromechanical hydraulic integration system is widely used, and the optimal design of this kind of system also belongs to the focus of the industry. Based on this, this paper briefly introduces the connotation of joint simulation of electromechanical hydraulic integration system, and carries out in-depth research around the establishment of electromechanical hydraulic integration joint simulation model and the analysis of intelligent control algorithm. Combined with the analysis of electromechanical hydraulic integration joint simulation examples, it can be determined that this research is outstanding in the efficient integration of simulation models of various subsystems, It can provide platform support for collaborative analysis and design.
[Keywords]joint simulation; electromechanical hydraulic integration system; simulink
1 機電液一體化系統聯合仿真內涵
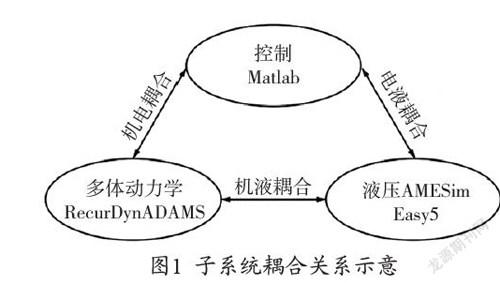
機電液一體化系統聯合仿真需要劃分一體化系統為子系統,各子系統相對獨立,具體保液壓子系統、機械子系統、控制子系統,且各子系統的對應模型建立需要得到專業軟件支持。通過連接不同仿真軟件,軟件輸入信號可選擇某軟件獲取仿真結果,以此完成模型構建,如輸入轉速、力等信號的具體數值,在不同信號激勵作用下,模型可實現對應響應量輸出,如加速度、位移等。這類響應量可進一步輸入其他模型中,不同領域軟件中的仿真數據雙向傳遞可由此實現。圖1為聯合仿真平臺中子系統間存在的具體耦合關系,結合該圖片進行分析可以發現,液壓系統在其中負責提供負載、力矩/驅動力,機械系統基于模型約束條件及機械動力學運動原理能夠隨之進行機械運動,運動學參數能夠隨之輸出,包括加速度、位移、速度等,液壓系統及負載的作用情況會同時受到機械系統產生的運動參數影響。圍繞機構位置姿態進行分析可以發現,其位移會導致位置姿態變化,負載會隨之受到影響,油缸中壓力區體積會受到機械系統中位移影響,這種影響會體現在液壓系統壓力方面,液壓系統油缸流量及馬達轉速直接受到位移速度影響。液壓系統、機械系統、控制系統耦合關系涉及參數傳遞,基于設定目標,控制系統能夠在各類傳感技術支持下對液壓系統的流量及壓力變化情況,機械輸出的速度及位移變化情況進行實時監測,實時控制信號可結合控制策略開展計算求得,如控制液壓系統的壓力及流量、泵的轉速、各閥閥芯開度值,機械系統的運動狀態可通過對輸出液力矩/壓力調整進行控制。
2 建立機電液一體化聯合仿真模型
2.1 選擇聯合仿真平臺
圍繞上文涉及的機電液一體化系統聯合仿真內涵進行深入分析,該聯合仿真需要在多個軟件間進行數據的相互交換,這一過程需要關注仿真環境的科學選擇,本文研究以可視化仿真工具Simulink作為聯合仿真平臺,該可視化仿真工具能夠滿足動態系統建模需要,在分析和仿真方面的表現突出且支持離散、連續的線性/非線性系統。選擇該可視化仿真工具作為聯合仿真平臺,主要依據4點:①該可視化仿真工具存在簡潔編程語言,在復雜控制算法編制方面具備優勢;②該可視化仿真工具的工具箱較為完善;③該可視化仿真工具的接口能夠與主流液壓仿真軟件、機械仿真軟件連接;④該可視化仿真工具具備多種計算算法。
2.2 搭建機械系統模型
在聯合仿真模型的機械系統模型搭建中,需優選設計、仿真軟件,如RecurDyn、Pro/Engineer、CATIA、ADAMS。RecurDyn的基礎為多體動力學為理論,可實現對預測系統及機電一體化系統的振動、負載大小、運動等精確控制的模擬,存在控制接口Control,這使得該軟件能夠完成.mdl及.m文件生成,進而連接其他領域仿真軟件,通過該軟件建立模型并添加相應復雜控制算法,即可開展聯合仿真。Pro/Engineer能夠在設計、分析、制造方面提供輔助,如實現機械類實體結構快速繪制,同時可實現多種格式轉換,這同樣能夠為聯合仿真提供支持。
2.3 搭建液壓系統模型
Easy5、AMESim軟件均可用于聯合仿真模型的液壓系統模型搭建。深入分析可以發現,前者屬于典型的液壓系統建模專用仿真軟件,該軟件的基礎為液壓傳動理論和粘性流體動力學理論,能夠提供健全仿真環境,滿足控制、機械、動力需要,同時其元件庫也較為豐富,在Easy5軟件支持下,設計人員可實現新元件的自行組合,這一過程需要得到原理級基礎模塊支持,進而完成模型搭建,通過運行模型則能夠得到S函數,滿足聯合仿真平臺需要。后者能夠提供健全仿真環境,模型庫同樣較為豐富,AMESim軟件在使用中可選擇基本元素法,基于實際物理系統和圖形化界面完成模型構建,這一過程不涉及復雜數學模型推導,輔以智能求解器可完成最佳積分算法選擇,仿真時間及精度可通過算法動態切換控制。在具體的液壓系統模型搭建過程中,可通過簡化模型降低搭設難度,如忽視緩沖力和摩擦力、忽視液壓系統液體質量、僅計算油缸作用力中的壓力、在機械模型部分添加液壓缸質量、設定存在剛性的液壓缸等,液壓系統模型可由此更順利搭建完成。
2.4 搭建控制系統模型
在基于Simulink聯合仿真平臺的控制系統模型搭建過程中,仿真環境變量設計可采用.m文件創建,并通過平臺調用軟件RecurDyn,作為控制對象的.mdl文件能夠隨之生成,搭建控制對象的控制算法控制器仿真模塊,即可實現交互控制仿真。S函數關系著聯合仿真平臺的擴展與參數化,求解器能夠與S函數調用語法交互,聯合仿真平臺模型中S函數加入后,需要在AMESim中連接對應的控制算法模型,以此結合聯合仿真平臺與AMESim,開展針對性仿真;控制系統模型搭建也可以應用ADAMS,輸入輸出變量可由ADAMS與聯合仿真平臺確定,聯合仿真可將控制系統建立在聯合仿真平臺中。基于ADAMS的控制系統模搭建也需要應用AMESim,需要通過其進行接口創建,完成輸出端口、輸入端口的具體數目設置,并對界面類型及圖標名稱進行定義。
3 智能控制算法分析
PID控制算法在實際工程中有著廣泛應用,該算法存在固定的簡單結構并在精確的數學模型基礎上建立,這使得參數實時調整在工作過程中無法實現。對于較為復雜的模型來說,智能控制算法聚焦模型的非線性和復雜性,具備較強的自組織功能、環境適應能力、學習能力,遺傳算法、專家系統、神經網絡均屬于典型的智能控制算法。以模糊控制為例,其基礎控制理論包括模糊規則、模糊邏輯推理、模糊集合論,通過結合PID控制算法與模糊理論,PID參數實時調整可基于誤差及對應變化率實現,更高的控制精度能夠由此獲取。
4 機電液一體化聯合仿真實例分析
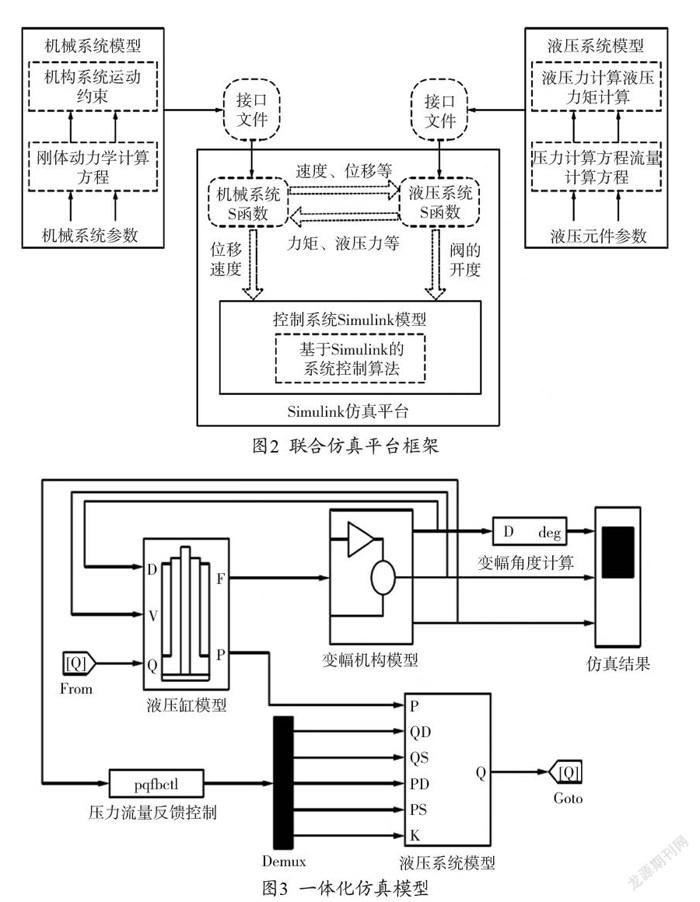
以某汽車起重機變幅系統為研究對象,探討本文研究的機電液一體化聯合仿真實用性,研究采用圖2所示的聯合仿真平臺框架,由仿真平臺、機械系統模型、液壓系統模型組成。
案例機電液一體化系統具體構成包括控制系統、起重機臂架、變幅液壓油缸、車輛底盤、液壓單元。閉環反饋控制能夠依托臂架控制系統實現,臂架的變幅角度控制可通過對電磁換向閥的調節完成,結合圖2所示框架及上文內容開展案例機電液一體化系統的聯合仿真。液壓系統模型、變幅機構模型分別通過軟件AMESim、RecurDyn搭建,基于S函數在聯合仿真平臺中實現變幅控制算法,液壓系統模型和機械模型需依托軟件數據接口在Matlab環境集成,由此可得到一體化仿真模型,如圖3所示。
通過優選模型求解器,完成仿真參數配置,包括最大步長、最小步長、起始時間、允許誤差等,之后依托聯合仿真平臺對案例機電液一體化系統的液壓、機械、控制系統開展聯合仿真。為驗證各仿真模型正確性及聯合仿真平臺可行性,需要測試案例機電液一體化系統的實際變幅角度和油缸位移,以此對比仿真結果。結合具體對比可以發現,通過細致觀察變幅角度的仿真曲線和測試曲線、變幅油缸位移的仿真曲線和測試曲線,能夠直觀了解變幅過程,并能夠確定系統要求得到較好滿足,整體存在沖擊小、運行平穩特點,實際測試數值與仿真數值基本一致,這說明本文研究的機電液一體化聯合仿真平臺具備較高實用性。
5 結論
基于聯合仿真的機電液一體化系統優化設計具備較高推廣價值。在此基礎上,本文涉及的選擇聯合仿真平臺、搭建機械系統模型、搭建液壓系統模型、搭建控制系統模型、實例分析等內容,則提供了可行性較高的聯合仿真路徑。為更好地發揮聯合仿真優勢,還應關注各類新型軟件的積極應用,以及相關不確定性因素的深入研究。
參考文獻
[1] 楊振中.傳感器技術在機電一體化系統中的應用研究[J].礦業裝備,2021(4):210-211.
[2] 王延申,劉順華.機電一體化系統在機械工程中的運用探討[J].石河子科技,2021(4):17-18.
[3] 徐順.機電一體化系統概念設計的基本原理[J].電子測試,2021(14):139-140,106.
[4] 鐘嵐.基于多傳感器信息融合的機電一體化系統設計[J].現代電子技術,2021,44(12):6-10.