一種新的統一電能質量調節器的雙環復合控制方法*
2021-01-12 12:19:18齊養梓朱小琴白萬榮
機械研究與應用 2020年6期
關鍵詞:控制策略
齊養梓,王 敏,朱小琴,白萬榮
(1.甘肅省電力公司慶陽供電公司,甘肅 慶陽 745000; 2.國網甘肅省電力公司電力科學研究院,甘肅 蘭州 730070)
0 引 言
近年來,隨著社會經濟的快速發展,大量的電力電子設備被廣泛應用在各行各業中,這些電力電子設備的運行給電網造成很大的污染,使得電網電壓和電流出現嚴重畸變,影響公共電網的電能質量。統一電能質量調節器(UPQC)作為一種新型的電能質量補償裝置,同時進行多重電能質量調節,能夠同時補償電壓跌落、電壓不平衡、諧波電壓、諧波電流、無功電流等多種電能質量問題,改善電能質量[1-6]。
目前國內外對UPQC的控制方法的研究主要集中在:雙環控制[6-7]、H∞控制[8]、模型預測控制[9]、無差拍控制[10]等方面。文獻[6]中UPQC使用雙環控制策略,但是,PI控制對個各低次諧波的抑制能力較弱,而且其補償精度也不高,無法實現無靜差控制。文獻[8]將H∞控制應用到UPQC中,具有將強的穩定性和魯棒性。但H∞控制理論復雜,瑞賽克忒方程求解困難。雙環控制在UPQC控制中得到廣泛應用,但由于UPQC的并聯補償單元PI控制跟蹤能力差,補償精度不高,無法精確跟蹤UPQC補償電流指令。基于內膜原理的重復控制器可提高系統的穩態性能,但其動態性能較差[11]。
筆者針對統一電能質量調節器中傳統PI控制器的跟蹤能力較差、補償性能有限的問題,提出了一種新的雙環控制策略,PI控制內環、重復控制器外環的UPQC并聯側雙環復合控制策略,新的雙環復合控制改善了UPQC電流控制的穩態補償精度和動態性能。利用指令電流前饋控制,提高UPQC的并聯側系統動態響應速度,增強系統的抗干擾性能,UPQC串聯側的電壓控制采用傳統的雙閉環控制。通過仿真驗證了UPQC的補償效果和新的雙環復合控制的有效性。
1 UPQC拓撲結構及數學建模
圖1是三相三線制的UPQC拓撲結構圖。拓撲結構由一個串聯型三相變流電路和一個并聯型三相變流電路共用一個直流側電容組成。其中串聯型三相變流電路通過耦合變壓器串聯接在負載與電網之間,起著補償電網中畸變電壓和調節負載電壓幅值的作用,給負載供給三相平衡的正弦電壓。并聯型三相變流電路并聯在非線性負載上,主要用來補償非線性負載接入電網引起的諧波電流和無功電流,并維持直流側電容電壓穩定,保證電網輸入電流是三相平衡正弦電流。
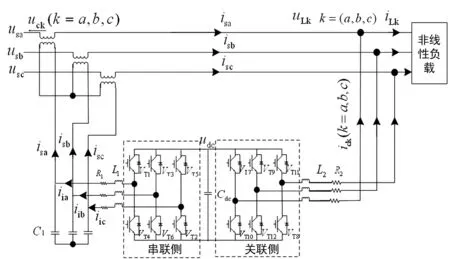
圖1 UPQC 拓撲結構
根據基爾霍夫定律,可得出串并聯三相變流電路在三相靜止坐標系下的數學模型,對其作Clark變換、park變換,得到在同步旋轉坐標系下的數學模型。串聯型三相變流電路在同步旋轉坐標系下的數學模型可表示為:
(1)
(2)
式中:KPWM是相對直流側的等效輸出增益;iid和iiq是在同步旋轉坐標系下串聯側的電感電流;Vcd和Vcq為同步旋轉坐標系下的補償電壓。
并聯三相變流電路的數學模型可表示為:
(3)
式中:icd和icq是同步旋轉坐標系d軸和q軸上的補償電流;VLd和VLq為同步旋轉坐標系下的負載側電壓。
2 UPQC雙閉環電壓控制
UPQC的串聯型三相變流電路作為電壓源,輸出與負載電壓和電網電壓差值大小相等方向相反的補償電壓uck。補償掉電網電壓中的諧波電壓和負序、零序分量,得到與電網電壓基波正序分量同相位的正弦波負載電壓。采用基于瞬時無功功率理論的補償量檢測算法[16]得到補償電壓指令和補償電流指令。使用雙閉環PI控制,跟蹤補償電壓指令。運用空間矢量調制得到控制觸發脈沖信號,輸出電壓補償量間接控制補償電網電壓獲得正弦負載電壓。
uck=uLk-usk,k=a,b,c
(4)
(5)
式中:kp1v,ki1v是電壓環的比例系數和積分系數;kp1i,ki1i是電流環的比例系數和積分系數。
根據式(5)得到UPQC在同步旋轉坐標系下的電壓控制結構框圖。
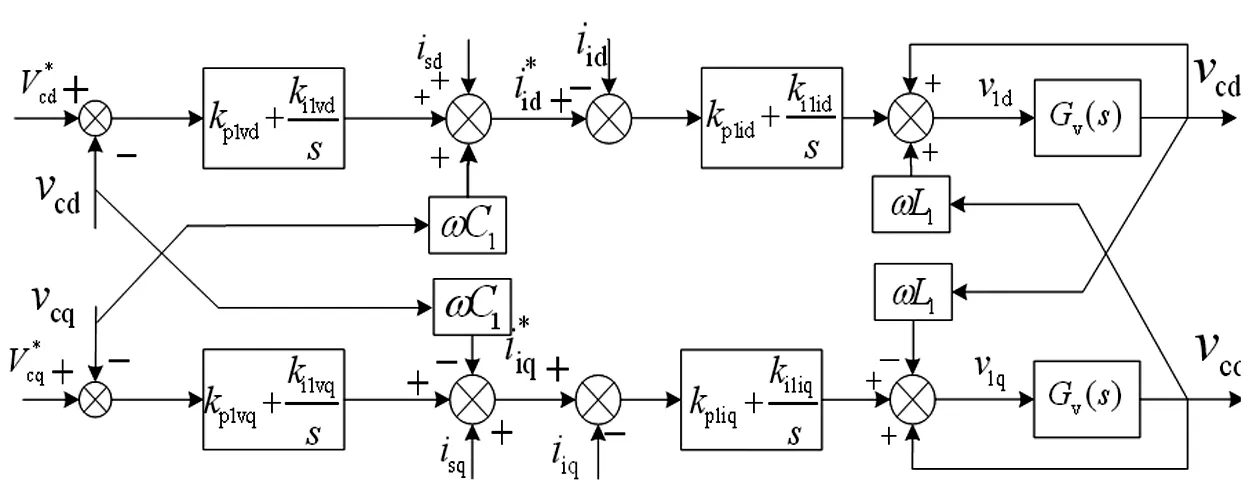
圖2 UPQC在dq軸下的串聯型三相變流電路電壓控制結構框圖
3 UPQC雙環復合電流控制
UPQC的并聯型三相變流電路作為電流源,輸出與電網電流和負載電流差值大小相等方向相反的補償電流ick。補償掉負載電流中的諧波電流和無功電流,補償后的電網電流是與電網電壓基波正序分量同相位的正弦電流。使用PI控制內環,重復控制器外環復合協調控制跟蹤電流補償指令,減小并聯側系統的穩態誤差,輸出補償電流,間接控制電網輸入電流為正弦電流。
ick=isk-iLk,k=a,b,c
(6)
3.1 電流環PI設計
首先,考慮到在同步旋轉坐標系下,d軸和q軸電流控制回路中有icq·ωL2、-icd·ωL2耦合項存在。為了使d軸和q軸可以獨立控制互不影響,引入狀態反饋解耦法[4]消去dq軸之間的耦合,將耦合的dq系統轉變成兩個相互獨立的單輸入單輸出系統。為得到較低的電流跟蹤誤差,用PI控制進行控制。電流內環控制框圖如圖3所示。
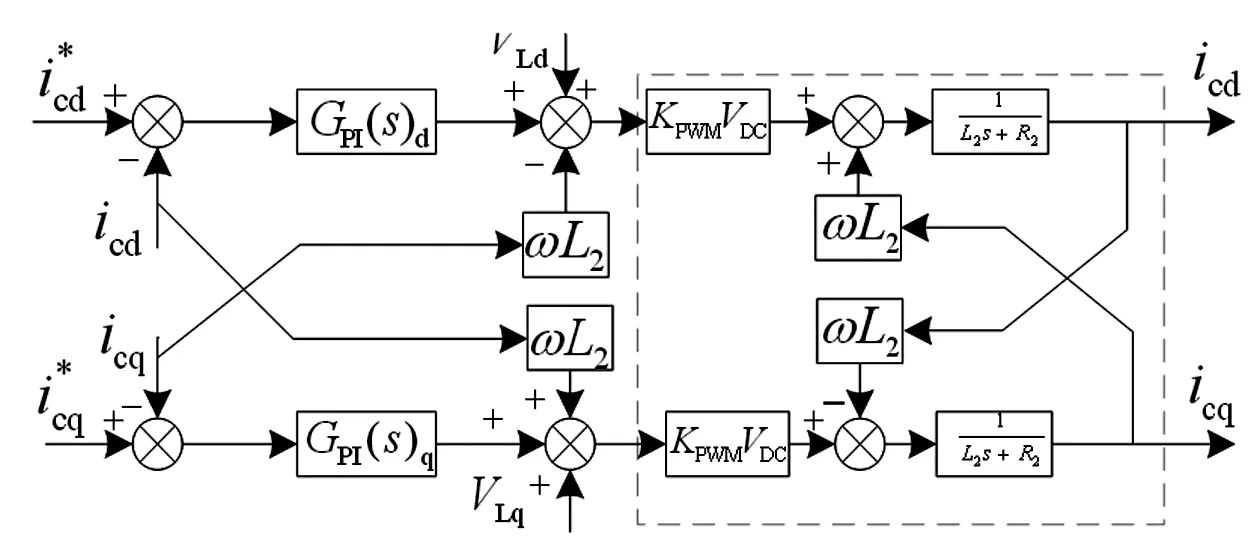
圖3 同步旋轉坐標系下并聯型三相變流電路電流環控制框圖

圖4中G(s)為UPQC并聯側的被控對象在s域的傳遞函數。
(7)

圖4 UPQC并聯側電流環dq軸獨立控制框圖
由圖4得出UPQC單閉環PI電流控制的閉環傳遞函數:
Gclose(d,q)i(s)=
(8)
式中:KPWM是相對直流側的等效輸出增益,Kp(d,q)和Ki(d,q)為d,q軸上PI控制器的比例系數和積分系數,VDC是UPQC直流側電壓。
在離散化控制系統中,由于采樣和計算延時,使得當前周期計算的控制量延遲一拍作用,實際調制信號與計算得到的調制信號相比延時了一個采樣周期。為表現延時一拍的作用,在控制模型中加入了零階保持器(zero-order holder)。其傳遞函數為:
(9)
d軸和q軸控制系統的模型相同,在此只做出d軸控制系統的模型。加入零階保持器的d軸控制系統結構圖如圖5所示。

圖5 加入延時一拍和零階保持器的d軸控制系統結構框圖
圖5中GdPI(s)i為PI電流控制器d軸上的傳遞函數,e-sTs為延時一個采樣周期,GZOH(s)是零階保持器的傳遞函數。
利用零階保持器可得到圖5的離散化控制系統框圖,如圖6所示。

圖6 離散化控制系統的結構框圖
通過圖7所示的離散控制系統的閉環頻率特性圖可看出,在100 Hz之前系統增益接近于0,相位滯后不明顯,補償電流輸出可跟蹤指令電流。在200 Hz以后,輸入輸出幅值衰減緩慢,且相位滯后明顯,會導致UPQC并聯側系統的不穩定。故單獨的PI控制很難保證控制系的穩定性和系統的控制性能。所以,通過設計重復控制器外環控制來補償PI控制的增益和相位滯后,提高UPQC并聯側系統的控制性能。
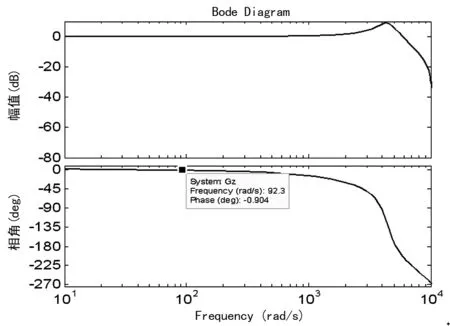
圖7 UPQC并聯側單一PI控制離散系統的頻率特性曲線圖
3.2 重復控制器設計
重復控制是一種基于內模原理的控制策略,包括重復控制器內膜、周期性延遲環節Z-N和校正器C(z)。其結構圖如圖8所示。重復控制器的傳遞函數可表示為:
Grep(z)=KMC(z)
(10)
式中:KM表示重復控制器內膜,C(z)表示補償器。

圖8 重復控制系統結構框圖
圖8中Q(z)是衰減濾波器,其作用是抑制系統高頻增益引起的不穩定性,可以是具有低通性質的函數,也可以為小于1的常數。此處取為0.97。補償器C(z)是重復控制器設計的關鍵,決定了重復控制系統的性能。其作用是補償被控對象G(z)的幅頻特性和相頻特性,以確保重復控制器的穩定運行。
重復控制器的內膜關系式可表示為:
(11)
補償器C(z)可表示為:
C(z)=KrZkS(z)
(12)
式中:Kr是重復控制器增益系數;ZkS(z)的作用是高頻衰減和低頻校正,進一步提高UPQC并聯側系統的穩定性;Zk表示超前環節,用于相位補償,一般選取k=3;S(z)為低通濾波器,主要對并聯側的被控對象進行幅值補償。根據文獻[15],當S(z)G(z)=1時,重復控制器的控制性能最佳。取S(z)=1/G(z),保證整個頻段內重復控制器的性能最佳。在實際系統中由于建模不穩定,會使S(z)不準確,甚至會導致系統不穩定。因此采用低頻對消,高頻衰減的原則設計S(z)。
3.3 PI+重復控制器的傳統復合控制
UPQC的補償電流指令包含大量的諧波信號,重復控制器理論上可以實現任意次諧波信號的無靜差跟蹤,其穩定性能理想。但由于具有周期延遲,在動態性能上較差,很少單獨作為控制器來用,一般和其他控制器聯合使用。考慮到PI控制動態響應速度快,但穩定性能較差。為此本文采用PI控制內環、重復控制外環復合控制策略。其結構框圖如圖9所示。

圖9 傳統復合控制策略框圖
圖9中是GPI(z)i內環PI控制的離散傳遞函數,G(z)是UPQC并聯側的被控對象在離散域中的傳遞函數。
PI控制器的離散傳遞函數為:
(13)
根據UPQC電路仿真參數,取并聯側耦合電感L2=1.0 mH,等效電感電阻R2=0.48 Ω。經零階保持器將G(s)離散化得G(z):
(14)
3.4 新的雙環復合控制策略
為提高復合控制的動態特性,采用補償電流指令前饋控制對上述復合控制進行改進。其改進后的控制結構框圖如圖10所示。

圖10 新的雙環復合控制策略框圖
新的雙環復合控制主要包括三部分:外環重復控制器、補償電流指令前饋控制和內環PI控制器。利用內環PI控制校正中低頻段頻率特性為0dB、0°,保證并聯型三相變流電路獲得良好的補償精度。重復控制器確保系統的穩態性能,利用補償電流指令前饋到PI控制電流內環,形成單位負反饋的PI控制電流環,確保系統的動態性能,快速跟蹤補償電流指令。
當UPQC并聯側雙環復合控制穩定運行時,補償電流跟蹤誤差小,此時PI控制器的作用很小,主要由重復控制器作用;當負載側電流發生畸變時,補償電流的參考值與反饋值誤差突然變大,重復控制器響應速度慢,而PI控制器快速響應產生調節作用,此時UPQC并聯側系統主要由PI控制起作用。1個周期過后,重復控制器產生調節作用,與PI控制相互協調,跟蹤補償電流誤差信號。誤差減小后,PI調節器的作用逐漸減小,重復控制器繼續起主導作用,直至并聯側的控制系統達到新的穩態。
3.5 新的雙環復合控制策略穩定性分析
由圖9可知,采用PI單獨控制時并聯側的系統誤差:
(15)
式中:GPI(z)i是PI控制的離散傳遞函數;G(z)是UPQC并聯型三相變流電路被控對象的離散傳遞函數。
采用新的雙環復合控制時并聯側的系統誤差:
(16)
式中:Gclose(z)是新的雙環復合控制內環PI的閉環傳遞函數。
計算圖10中并聯型三相變流電路內環PI的閉環傳遞函數:
(17)
對式(15)和式(16)對比發現,采用新的雙環復合控制的電流跟蹤精度優于單閉環PI控制的電流跟蹤精度。
為驗證所提出的新的雙環復合控制策略穩定性,根據小增益原理推導出UPQC并聯型三相變流電路新型復合控制策略系統穩定的充分條件:
|Q(ejωTs)-C(ejωTs)Gclose(ejωTs)|<1,
ω∈[0,π/Ts]
(18)
結合式(12)將UPQC并聯型三相變流電路系統穩定條件變換為:
|Q(ejωTs)-KrejωkTsS(ejωTs)Gclose(ejωTs)|<1,
ω∈[0,π/Ts]
(19)
式中:Ts是采樣周期,由上述重復控制器設計環節知Q(z)=0.97,k=3。經過計算,關系式(19)成立。說明UPQC并聯型三相變流電路新的雙環復合控制策略的系統穩定。
4 仿真結果分析
采用圖1的拓撲結構圖,利用MATLAB建立UPQC的仿真模型,相關參數見表1。

表1 UPQC 電路仿真參數
圖11是UPQC含諧波的負載電壓和補償后的電網電壓波形圖。發現UPQC串聯型三相變流電路使用雙閉環控制,可實現對負載側電壓的補償,補償后的電網電壓是正弦電壓。圖12是UPQC電壓補償量。
圖13是補償前畸變負載電流和補償后輸入電流波形圖,經FFT分析A相負載電流iLa的THD為29.77%,電流波形嚴重畸變。經新的雙環復合控制補償后電網輸入電流的THD降到1.96%,得到電網正弦電流。圖14為相應的補償電流波形圖。

圖11 含諧波的三相負載UPQC的負載電壓(vLa、vLb、vLc)和電網電壓(vsa、vsb、vsc)

圖12 含諧波的三相負載UPQC的串聯補償電壓(vCa、vCb、vCc)
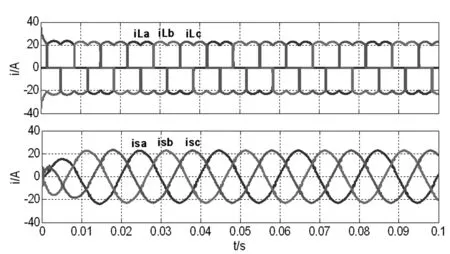
圖13 UPQC三相負載電流(iLa、iLb、iLc)和電網輸入電流(isa、isb、isc)

圖14 補償電流(ica、icb、icc)
圖15是UPQC采用新型雙環復合控制的三相補償電流對補償電流指令的電流跟蹤波形圖。由圖可看出,當負載發生畸變時,UPQC并聯側系統主要是PI控制起作用,在經過一個周期的延遲后,重復控制器開始發生作用,PI和重復控制器協調作用控制,跟蹤電流補償指令,實現了對補償電流指令信號的快速響應。

圖15 采用新型雙環復合控制的補償電流跟蹤波形圖
為更好的驗證雙環復合控制的有效性,對PI控制和新的雙環復合控制在UPQC裝置中的補償效果進行對比,圖16(a)表示只采用PI控制的A相輸入電流波形,圖16(b)表示采用新的雙環復合控制的A相輸入電流波形。通過比較發現,圖16(a)中,輸入電流波形的正弦化程度不高,出現部分畸變,經FFT分析其THD為3.99% 。圖16(b)中輸入電流的波形更平滑,正弦化程度更高,其THD是1.96%。通過對比發現,采用新的雙環復合控制比使用PI控制時UPQC的電流補償效果要明顯,這說明采用新的雙環復合控制策略在UPQC的控制中更具優勢。
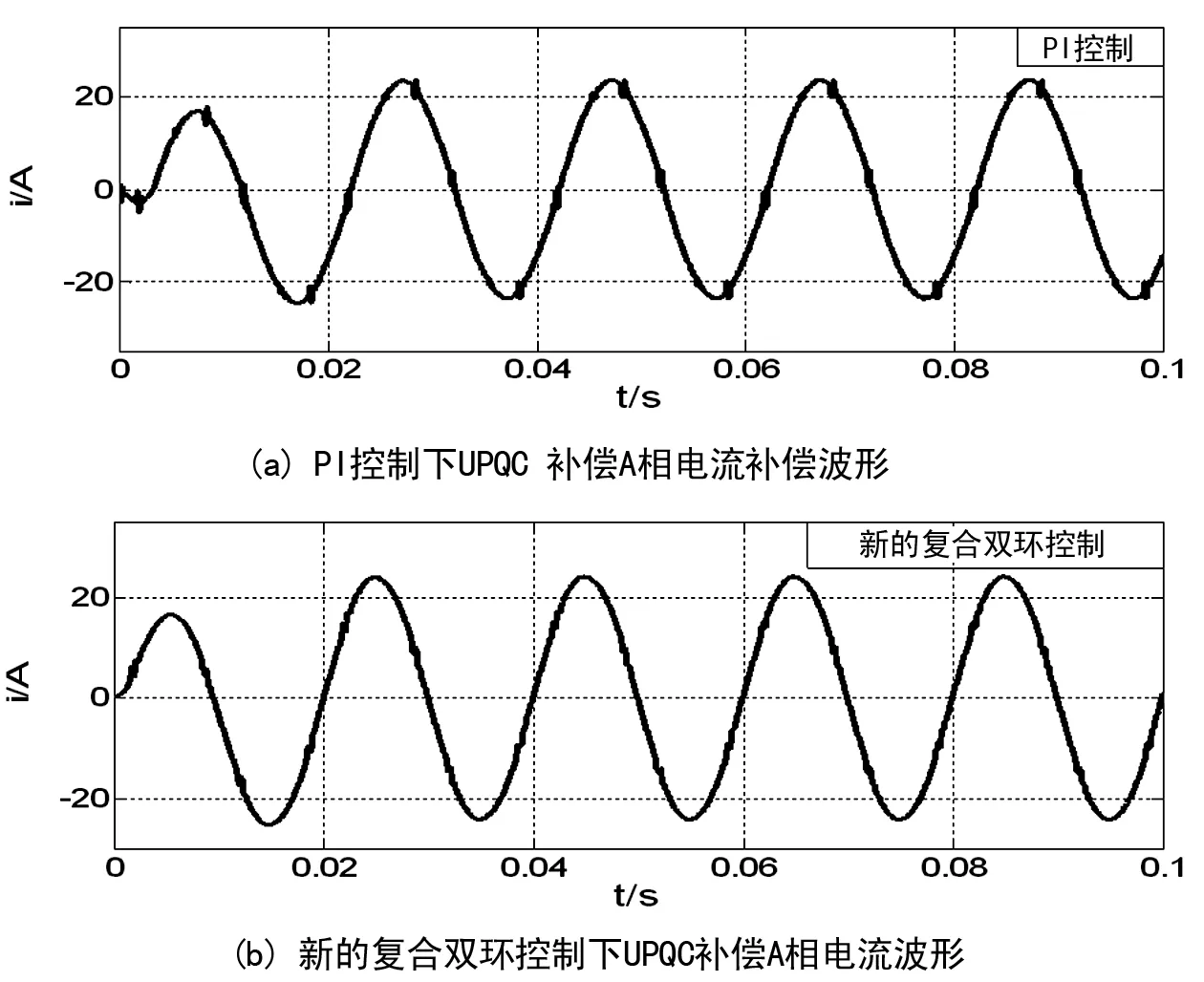
圖16 PI控制與新的復合雙環控制補償效果對比圖
5 結 論
本文提出了一種PI和重復控制器相互協調作用的UPQC并聯側雙環復合控制策略。PI控制內環,重復控制器外環的復合電流控制,降低了UPQC并聯側的跟蹤誤差,改善了PI控制的穩態性能較差的缺陷。通過理論和仿真證明了雙環復合電流控制的UPQC并聯側跟蹤誤差明顯小于單閉環PI控制時的跟蹤誤差,其跟蹤精度明顯優于單閉環PI的跟蹤精度。有效提高了UPQC并聯側電流控制的補償精度和動態性能。仿真實驗驗證了UPQC新的雙環復合控制的有效性和可行性。
猜你喜歡
艦船科學技術(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
山東工業技術(2016年15期)2016-12-01 05:31:37
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(2016年5期)2016-03-22 01:09:38
電機與控制應用(2015年2期)2015-03-01 03:49:24
電測與儀表(2014年24期)2014-04-09 11:35:36
