陀螺光纖內(nèi)的光纖環(huán)膠接固定方式分析*
2021-01-12 12:19:00黃遲航王斌華
機(jī)械研究與應(yīng)用 2020年6期
黃遲航 ,王斌華,胡 橋,孔 軍,陳 平
(1.長(zhǎng)安大學(xué),道路施工技術(shù)與裝備教育部重點(diǎn)實(shí)驗(yàn)室,陜西 西安 710064; 2.西安交通大學(xué),陜西省智能機(jī)器人重點(diǎn)實(shí)驗(yàn)室,陜西 西安 710049;3.西北工業(yè)大學(xué) 機(jī)電學(xué)院,陜西 西安 710072; 4.慣性技術(shù)航空科技重點(diǎn)實(shí)驗(yàn)室,航空工業(yè)自控所,陜西 西安 710065)
0 引 言
光纖陀螺是一種全固態(tài)、無(wú)轉(zhuǎn)動(dòng)、結(jié)構(gòu)簡(jiǎn)單且能適應(yīng)復(fù)雜環(huán)境的角位移和角速度測(cè)量?jī)x器,運(yùn)用于海、陸、空等慣性導(dǎo)航領(lǐng)域[1]。光纖陀螺需要在復(fù)雜惡劣的環(huán)境中正常工作并保持工作可靠性。光纖陀螺在大機(jī)動(dòng)或者強(qiáng)振動(dòng)工況下,光纖環(huán)在陀螺內(nèi)膠粘固定位置會(huì)改變相互耦合荷載分布,影響結(jié)構(gòu)形變。這種復(fù)雜的工況會(huì)導(dǎo)致光纖環(huán)組件的形變,進(jìn)而影響到光纖陀螺的核心器件——光纖環(huán)的結(jié)構(gòu)形變。由于光纖環(huán)是精密部件,對(duì)于內(nèi)部應(yīng)力極為敏感,會(huì)造成光纖陀螺測(cè)試不精確,故對(duì)光纖環(huán)組件的結(jié)構(gòu)優(yōu)化是極為重要的。
文獻(xiàn)[2]對(duì)光纖陀螺環(huán)圈骨架進(jìn)行優(yōu)化設(shè)計(jì),并進(jìn)行試驗(yàn)驗(yàn)證。文獻(xiàn)[3]進(jìn)行了改進(jìn)光纖陀螺外罩設(shè)計(jì)的研究,這使得光纖環(huán)溫度時(shí)空變化率降低,且有助于改善Shupe誤差所導(dǎo)致的零偏誤差。文獻(xiàn)[4]采用冗余配置方案設(shè)計(jì)了新型光纖陀螺組合支架,并通過(guò)ANSYS有限元軟件進(jìn)行模態(tài)和頻率響應(yīng)分析優(yōu)化,提高了光纖陀螺的精度和可靠性。文獻(xiàn)[5]對(duì)光纖陀螺的結(jié)構(gòu)核心采用不同的材料,并利用仿真軟件進(jìn)行模態(tài)分析和諧響應(yīng)分析,對(duì)比分析結(jié)構(gòu)材料的比剛度對(duì)光纖陀螺性能的影響。文獻(xiàn)[6]針對(duì)了光纖陀螺溫度場(chǎng)不均勻的問(wèn)題,對(duì)溫度場(chǎng)模型進(jìn)行文太和瞬態(tài)仿真分析,并根據(jù)分析結(jié)果進(jìn)行結(jié)構(gòu)優(yōu)化設(shè)計(jì),改善了光纖陀螺溫度補(bǔ)償?shù)男Ч?/p>
綜上所述,對(duì)于光纖環(huán)組件的優(yōu)化多是陀螺結(jié)構(gòu)、結(jié)構(gòu)核心采用不同材料和溫度補(bǔ)償?shù)确矫娴膬?yōu)化。筆者則是針對(duì)振動(dòng)工況下光纖環(huán)形變的優(yōu)化。由于光纖環(huán)是通過(guò)固化膠粘劑粘接在光纖環(huán)組件中,不同的布置方式會(huì)對(duì)加速場(chǎng)下的光纖環(huán)產(chǎn)生不同形變。因此筆者選取4種膠粘劑在光纖環(huán)組件中的布置方式,并將陀螺光纖環(huán)組件放于不同的加速度場(chǎng)中,仿真對(duì)比分析得出合理布置方式。
1 光纖環(huán)組件結(jié)構(gòu)和材料參數(shù)
光纖環(huán)組件由法蘭固定在光纖陀螺基座上,其由U型槽、頂蓋、膠粘劑和光纖環(huán)四部分組成。光纖環(huán)通過(guò)膠粘劑粘接在U型槽內(nèi),與其同心,頂蓋與U型槽裝配后,激光焊接固定。光纖環(huán)組件示意圖如圖1所示,光纖環(huán)的橫斷截面示意圖如圖2所示。U型槽與頂蓋的材料參數(shù)均為軟磁合金,結(jié)構(gòu)材料參數(shù)如表1所示。由于光纖環(huán)是各向異性復(fù)合材料,本文通過(guò)細(xì)觀力學(xué)有限元方法[7]計(jì)算得出的光纖環(huán)等效材料參數(shù)如表2所列。
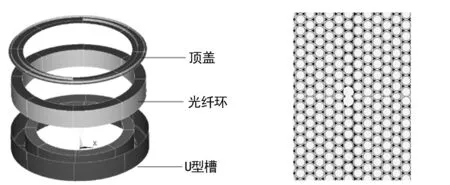
圖1 光纖環(huán)組件結(jié)構(gòu)示意圖 圖2 光纖環(huán)橫截?cái)嗝?/p>

表1 軟磁合金和膠粘劑的材料參數(shù)

表2 光纖環(huán)等效材料參數(shù) /GPa
2 光纖環(huán)組件有限元分析
2.1 有限元模型建立
利用前面所述的材料參數(shù),通過(guò)ANSYS有限元軟件建立幾種膠粘劑放置方式下的光纖環(huán)組件有限元模型。并采用SHELL單元模擬U型槽和頂蓋,SOLID單元模擬光纖環(huán)和環(huán)氧粘膠劑。通過(guò)設(shè)置不同光纖環(huán)膠接固定方式得出相對(duì)應(yīng)陀螺光纖環(huán)組件的形變影響。
2.2 膠粘劑的布置方式以及工況選擇
文中設(shè)計(jì)了4種膠粘劑固化布置方式,也即膠粘劑在光纖環(huán)組件中的相對(duì)固定位置,如圖3所示。深藍(lán)色填充部分4即為膠粘劑。由于光纖環(huán)的外側(cè)圓面有電路,而且光纖環(huán)的尾纖在外側(cè)面,所以在光纖環(huán)的外側(cè)和U型槽進(jìn)行粘接是不準(zhǔn)確的。光纖環(huán)是通過(guò)固化膠粘劑與U型槽相連,其布置方式直接影響到光纖環(huán)的形變,后續(xù)仿真計(jì)算將分析得出不同布置方式的組件在不同加速場(chǎng)下的形變影響。

圖3 光纖環(huán)組件膠粘劑放置示意圖1.U型槽 2.頂蓋 3.光纖環(huán) 4.膠粘劑
根據(jù)光纖環(huán)組件實(shí)際工作環(huán)境,所選加速場(chǎng)為+X向10 g,即橫向方向。其中,文中將+X向10 g加速度場(chǎng)定義為施加在沿+X向10 g的載荷。加速場(chǎng)為+Y向10 g,即軸向方向。
根據(jù)前文采用四種膠粘劑的布置方式的工況進(jìn)行計(jì)算分析。由于整個(gè)光纖環(huán)組件的對(duì)稱性,結(jié)構(gòu)受到+X與+Z的加速場(chǎng)的影響是相同的。故工況選擇如表3所示,共有八種工況,限于篇幅,選擇加速度場(chǎng)+X向10 g的工況計(jì)算云圖進(jìn)行說(shuō)明分析。
2.3 光纖環(huán)的變形結(jié)果分析
前四種工況下,采用了+X向10 g的加速度場(chǎng),光纖環(huán)組件和光纖環(huán)的形變分別如圖4、5所示,在不同工況下,根據(jù)不同膠粘劑的布置方式下的形變結(jié)果對(duì)比分析得出光纖環(huán)在加速場(chǎng)下的形變,且找出膠粘劑的最優(yōu)布置方式。
如圖4所示,由圖(a)、(b)、(c)和(d)對(duì)比分析可得,四種工況中的光纖環(huán)組件的總形變分別是2.574 mm、1.740 mm、0.822 mm和1.113 mm。采用圖(c)工況三的膠粘劑布置方式的光纖環(huán)組件總形變最小為0.822 mm,效果顯著。

表3 膠粘劑放置方式

圖4 不同膠粘劑布置方式的光纖環(huán)組件總形變圖

圖5 不同膠粘劑布置方式的光纖環(huán)總形變圖
如圖5所示,由圖(a)、(b)、(c)和(d)對(duì)比分析可得,四種工況中光纖環(huán)的總形變分別是2.574 mm、1.013 mm、0.675 mm和1.078 mm。采用圖(c)工況三的膠粘劑布置方式的光纖環(huán)總形變最小為0.675 mm。所以綜合考慮得出:圖3(III)膠粘劑布置方式-光纖環(huán)上表面和內(nèi)側(cè)面布置粘膠劑較為有效的減少光纖環(huán)的變形,是4種布置方式中較為理想的。
同理,在+Y向10 g的加速度場(chǎng)作用下,針對(duì)工況五、六、七和八仿真計(jì)算可以得出,四種工況中的光纖環(huán)組件的總形變分別是0.934 mm、0.778 mm、0.261 mm和0.513 mm。采用圖3(III)膠粘劑布置方式的光纖環(huán)組件總形變最小為0.261 mm,這說(shuō)明該布置方式下光纖環(huán)組件的形變減少效果較為明顯。不僅如此,光纖環(huán)的總形變分別為0.837 mm、0.700 mm、0.189 mm和0.425 mm。當(dāng)光纖環(huán)組件受到+Y向10 g的加速度場(chǎng)作用時(shí),采用圖3(III)膠粘劑布置方式,也即光纖環(huán)上表面和內(nèi)側(cè)面布置粘膠劑,這會(huì)使光纖環(huán)結(jié)構(gòu)形變較小。
綜合上述分析結(jié)果,對(duì)于X向加速度和Y向加速度時(shí),各種粘接方式產(chǎn)生的光纖環(huán)形變差異都是相同的。并且考慮到實(shí)際的工作環(huán)境中會(huì)出現(xiàn)多個(gè)方向上的平動(dòng)加速度場(chǎng),所以建議采用光纖環(huán)上表面和側(cè)面布置布置粘膠劑的方式,該布置形式能適應(yīng)實(shí)際復(fù)雜工況下的形變要求,且能較為理想的減少光纖環(huán)在加速度場(chǎng)下的結(jié)構(gòu)形變。
3 結(jié) 論
通過(guò)以上分析可以得出以下結(jié)論:
(1) 膠粘位置對(duì)光纖陀螺組件和光纖環(huán)本體的形變影響顯著,因此對(duì)于光線陀螺設(shè)計(jì)時(shí),應(yīng)針對(duì)膠粘劑位置進(jìn)行優(yōu)化分析,能有效提高光纖陀螺的測(cè)量精度。
(2) 通過(guò)光纖環(huán)平面內(nèi)和光纖環(huán)軸向加速度場(chǎng)分析可知,光纖環(huán)平面內(nèi)的加速度場(chǎng)作用時(shí),光纖環(huán)組件和光纖環(huán)本體結(jié)構(gòu)的形變較大,因此綜合實(shí)際工況下加速度場(chǎng)多變的特點(diǎn),建議采用光纖環(huán)上表面和內(nèi)側(cè)面布置膠粘劑的方案。
探究了模擬振動(dòng)工況下膠粘劑對(duì)光纖環(huán)組件和光纖環(huán)的形變影響。通過(guò)采用不同的膠粘劑布置方式,對(duì)不同加速場(chǎng)下光纖環(huán)組件進(jìn)行有限元分析,對(duì)比分析得出減少光纖環(huán)形變較為理想的膠粘劑布置方式。這對(duì)于光纖環(huán)組件的后續(xù)結(jié)構(gòu)優(yōu)化提供了參考,也為提高載體大機(jī)動(dòng)情況下光纖陀螺的測(cè)試精度提供了方向。
猜你喜歡
民用飛機(jī)設(shè)計(jì)與研究(2020年4期)2021-01-21 09:15:02
上海節(jié)能(2020年3期)2020-04-13 13:16:16
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:00
天津醫(yī)科大學(xué)學(xué)報(bào)(2019年6期)2019-08-13 07:04:32
電子制作(2018年18期)2018-11-14 01:48:24
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:22
機(jī)械工程師(2015年10期)2015-02-02 01:14:03
中國(guó)中醫(yī)藥現(xiàn)代遠(yuǎn)程教育(2014年11期)2014-08-08 13:23:44
機(jī)電產(chǎn)品開發(fā)與創(chuàng)新(2014年4期)2014-03-11 16:42:24
終身教育研究(2014年5期)2014-02-28 01:23:06
