微小型旋翼無人機(jī)噪聲適航測試研究*
2021-01-12 12:18:58郭少杰
機(jī)械研究與應(yīng)用 2020年6期
夏 天,郭少杰
(1.天津電子信息職業(yè)技術(shù)學(xué)院,天津 300350; 2.中國汽車技術(shù)研究中心有限公司,天津 300300)
0 引 言
近年來,多旋翼無人機(jī)由于其輕巧、機(jī)動(dòng)、靈活等特性,在各個(gè)領(lǐng)域有著廣泛的應(yīng)用。而在一些應(yīng)用場景中,例如:利用多旋翼無人機(jī)進(jìn)行聲音采集、利用多旋翼無人機(jī)進(jìn)行社區(qū)快遞的運(yùn)送等對于多旋翼無人機(jī)的聲學(xué)特性要求非常高,有些特殊場景旋翼無人機(jī)自身的噪聲甚至決定了執(zhí)行任務(wù)的成敗。主流的無人機(jī)制造廠商已經(jīng)開始對無人機(jī)噪聲進(jìn)行優(yōu)化[1-3]。而對于微小型旋翼無人機(jī)的噪聲測試,國內(nèi)相對較少。2018年,王兵[4]在其論文《小型無人機(jī)的仿生降噪》中提到兩種測試無人機(jī)旋翼噪聲的方法,一種是在靜音室內(nèi)進(jìn)行的靜態(tài)噪聲測試,另一種是在空曠的室外環(huán)境中進(jìn)行的飛行噪聲測試,在國內(nèi)初步提出了無人機(jī)噪聲測試的兩種簡易方法。而在國外,2010年,意大利的Marino[5]首次建立了應(yīng)用于小型無人機(jī)旋翼的氣動(dòng)聲學(xué)測量模型,主要針對小型旋翼無人機(jī)的旋翼聲壓級分析。2013年,英國的Sinibaldi等[6]提出了小型無人機(jī)的靜態(tài)旋翼噪聲分析實(shí)驗(yàn),這種基于靜態(tài)無人機(jī)旋翼噪聲分析試驗(yàn)的方法,在后續(xù)的旋翼無人機(jī)旋翼噪聲測試中被廣泛應(yīng)用與不斷改進(jìn)。而在無人機(jī)噪聲適航測試方面,JARUS(Joint Authorities for Rulemaking on Unmanned Systems,無人機(jī)規(guī)章聯(lián)合制定機(jī)構(gòu))中的一些國家提出了對旋翼無人機(jī)進(jìn)行噪聲適航審定測試的概念,但是具體的審定方法尚未明確。特別是對于微小型(Small & Nano):重量小于5 kg,飛行半徑小于10 000 m,飛行時(shí)間小于1 h,飛行高度低于250 m的旋翼無人機(jī)尚未具有明確的噪聲適航審定方法[7]。
有鑒于此,筆者基于對某型微小型旋翼無人機(jī)進(jìn)行噪聲適航的數(shù)據(jù)采集方法探究,采集多組實(shí)驗(yàn)數(shù)據(jù)進(jìn)行分析,以期待獲取相對準(zhǔn)確的測試方法。
1 試驗(yàn)依據(jù)
重點(diǎn)參考了《航空器型號和適航合格審定噪聲規(guī)定》以下簡稱《CCAR-36-R2》[8]和《CFR Part 36_Noise standards: Aircraft type and airworthiness certification》,以下簡稱《FAR-36》[9]。
在《CCAR-36-R2》的附件G中規(guī)定了螺旋槳小飛機(jī)和螺旋槳通勤類飛機(jī)的起飛噪聲要求。該附件主要針對螺旋槳驅(qū)動(dòng)的飛機(jī),包含無人駕駛飛機(jī),飛越階段至少進(jìn)行六次的數(shù)據(jù)記錄,且要符合環(huán)境要求。考慮到微小型多旋翼無人機(jī)起飛重量極小,并且垂直起降的特性,與飛機(jī)起飛、飛越以及降落特性有著本質(zhì)不同,故著重參考了該文件附件J中最大審定起飛重量不大于3 175 kg的直升機(jī)噪聲合格審定作為替代程序。在《FAR-36》中,重點(diǎn)參考該文件的附件J,該附件中也對于起飛重量不大于3 175 kg的旋翼直升機(jī)噪聲測試給出了指導(dǎo)性意見。
需要注意的是,微小型旋翼無人機(jī)在起飛重量和動(dòng)力配置上,和直升機(jī)有著極大的差異。微小型旋翼無人機(jī)起飛重量往往在5 kg以內(nèi),并且動(dòng)力裝置往往是無刷直流電機(jī)驅(qū)動(dòng)旋翼,電機(jī)本體噪聲和發(fā)動(dòng)機(jī)本體噪聲所帶來的噪聲等級水平也具有顯著差異[10-11]。因此,考慮到質(zhì)量、驅(qū)動(dòng)方式、動(dòng)力裝置構(gòu)型[12]以及功率等因素的巨大差異,上述針對直升機(jī)的噪聲適航測試方法,可能在某些情況下,并不適用于本文所研究的微小型旋翼無人機(jī),需要在試驗(yàn)過程中逐步調(diào)節(jié)測定參數(shù),開創(chuàng)性探索適合于微小型旋翼無人機(jī)的飛行噪聲測試方法。
2 無人機(jī)噪聲測試試驗(yàn)
2.1 環(huán)境要求
傳聲器(麥克風(fēng))周邊不能有過多吸收、反射聲波的物質(zhì),例如高大樹木、建筑等;在旋翼無人機(jī)進(jìn)行試飛時(shí),周邊不能有干擾航線的物體,若出現(xiàn)影響無人機(jī)偏離航線的事、物,該次測試數(shù)據(jù)作廢。氣溫在2~35 ℃之間,相對濕度在20%~95%之間,以保證1/3倍頻程中的8 kHz頻段的大氣衰減率在每100 m衰減10 dB以內(nèi)。風(fēng)速小于5.28 m/s,風(fēng)速的測量要在距離地面1.2~10 m之間。背景噪聲必須低于無人機(jī)測試時(shí)所測得的A計(jì)權(quán)最大聲壓級15 dB(A)以上,因此,需要適當(dāng)調(diào)整無人機(jī)飛行時(shí)的高度H,以使得測得的噪聲數(shù)據(jù)值有效[13]。
2.2 器材選用
選用MicW-i437L傳聲器,該傳聲器符合IEC61672二級聲級計(jì)標(biāo)準(zhǔn),NoiseLab聲學(xué)分析軟件,如圖1所示。無人機(jī)選用微小型旋翼無人機(jī)(大疆“御Mavic 2 Pro”),起飛重量0.907 kg,如圖2所示。
圖1 MicW-i437L傳聲器和NoiseLab軟件示意圖
2.3 飛行軌跡
利用無人機(jī)自動(dòng)巡航功能,參照《FAR-36》的附件J,設(shè)定飛行高度為H=120 m,由于考慮到測試的A計(jì)權(quán)最大聲壓級數(shù)據(jù)要高于環(huán)境的背景噪聲15 dB(A)以上,才能使得噪聲數(shù)據(jù)有效,同時(shí)考慮到微小型無人機(jī)重量較輕、旋翼電機(jī)功率較小、葉尖馬赫數(shù)較低、產(chǎn)生噪音較低,另外進(jìn)行附加的H=100 m、H=50 m、H=10 m、H=5 m高度巡航進(jìn)行測試,在飛行時(shí),自動(dòng)定高飛行程序可以將飛行高度的偏差控制在上下0.5%的范圍內(nèi),在上述飛行高度的偏差下,聲音衰減幅度較小,本試驗(yàn)研究將上述偏差帶來的噪聲影響值忽略[14]。另外,在無人機(jī)起飛前,將環(huán)境噪聲以A計(jì)權(quán)聲壓級進(jìn)行記錄,并分析環(huán)境噪聲的頻譜圖,環(huán)境噪聲頻率多集中在2 000 Hz以下,如圖3頻譜圖所示,符合噪聲采集要求,而后再進(jìn)行無人機(jī)起飛操作。進(jìn)行飛行噪聲測試的軌跡示意圖,如圖4所示。
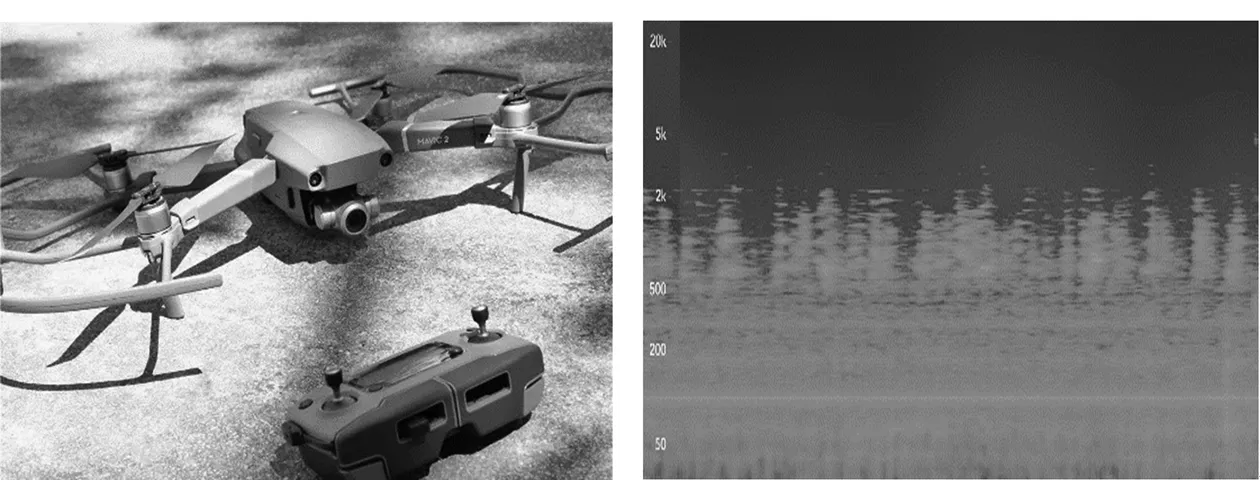
圖2 大疆“御Mavic 2 Pro”旋翼無人機(jī) 圖3 某次測試前的環(huán)境噪聲頻譜
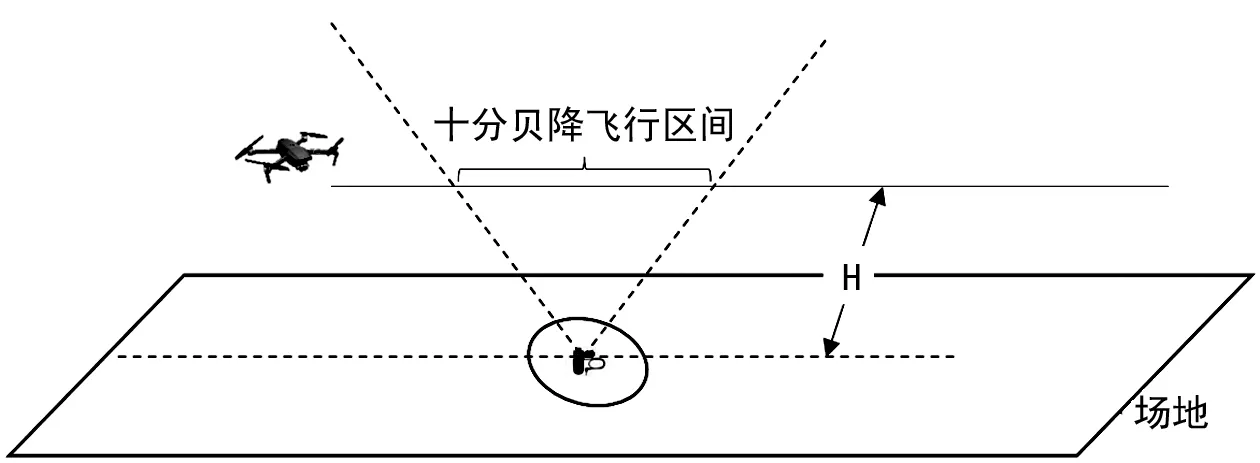
圖4 微小型無人機(jī)飛行噪聲測試軌跡示意圖
2.4 10 dB降區(qū)間的確定
《FAR-36》附件J中規(guī)定輕型旋翼機(jī)在噪聲測量和分析時(shí)可用聲暴露級(SEL)單位進(jìn)行噪聲大小的測量。在測量過程中,需要維持旋翼無人機(jī)最大功率轉(zhuǎn)速進(jìn)行飛越操作,從而獲得可能的最大噪聲。而用以計(jì)算聲暴露級(SEL)的數(shù)據(jù)應(yīng)該是在最大的A計(jì)權(quán)聲壓級(LAMAX)數(shù)據(jù)的范圍以內(nèi)。所選取的數(shù)據(jù)范圍即為左端和右端均為LAMAX-10 dB。需要注意的是,該處的10 dB降區(qū)間和計(jì)算有效感覺噪聲級(EPNdB)的10 dB降區(qū)間有所不同[15],如圖4中所示的“10 dB降區(qū)間”。
3 測試案例
3.1 A計(jì)權(quán)聲壓級
將不同頻率的聲壓級計(jì)權(quán)相加,得到聲音的聲壓大小,構(gòu)成了聲壓級。而A計(jì)權(quán)聲壓級考慮了人耳對于不同頻率的響應(yīng)水平,如果聲壓級沒有進(jìn)行A計(jì)權(quán)[16],測得的數(shù)據(jù)可能不能更為真實(shí)地反映實(shí)際人耳獲得的聲壓級大小。相應(yīng)地,還有B、C和Z計(jì)權(quán)等等,本次測試選用A計(jì)權(quán)聲壓級作為測試和計(jì)算的數(shù)據(jù)基礎(chǔ),測量時(shí)聲級計(jì)的動(dòng)態(tài)采樣速率選擇Slow,時(shí)間間隔Δ設(shè)置為0.5 s。在集聲器進(jìn)行聲壓級采集前,需要進(jìn)行校準(zhǔn)操作。
3.2 環(huán)境修正因子
環(huán)境因素對于影響室外聲音傳播的三個(gè)最常見的環(huán)境因素是風(fēng)、溫度和濕度。以空氣的溫度為20 ℃,相對濕度為20%為例,衰減系數(shù)α和頻率f的關(guān)系如圖5所示。環(huán)境濕度越大,聲音衰減程度越小[17]。測試進(jìn)行前,進(jìn)行溫度與相對濕度記錄。
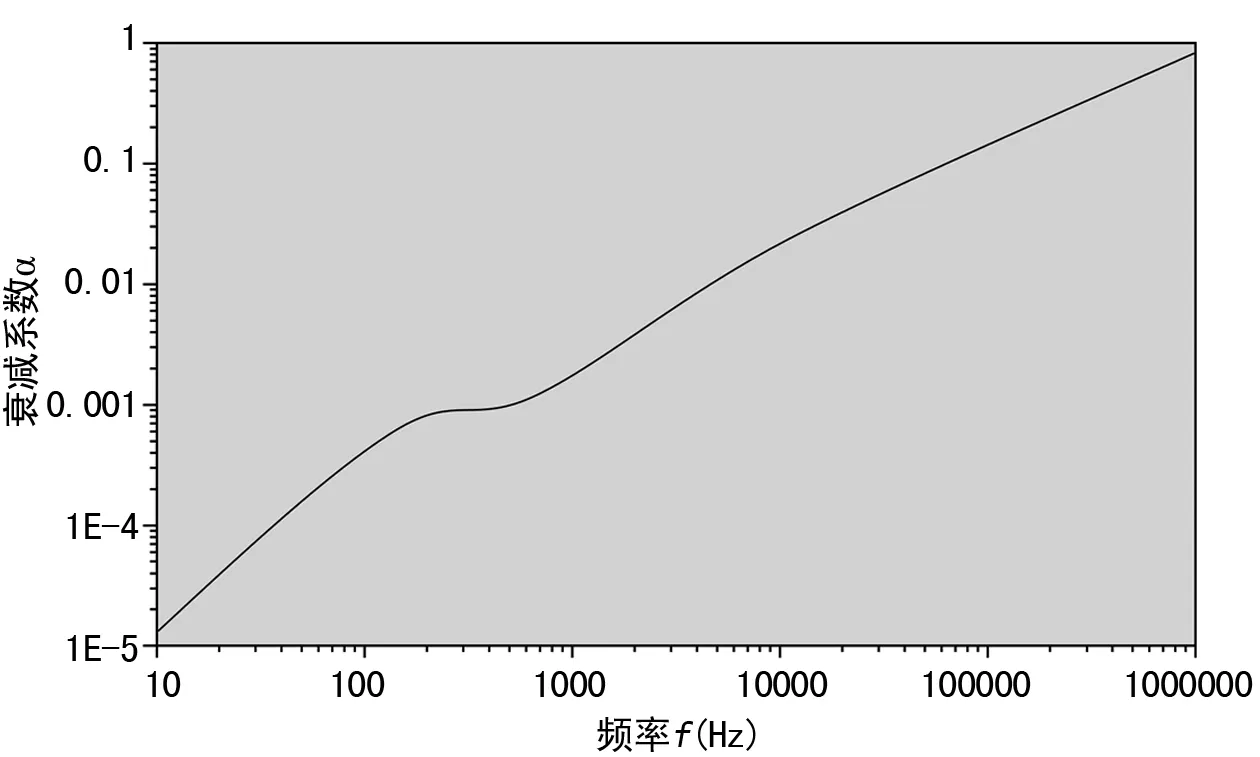
圖5 某條件下衰減系數(shù)α和頻率f的log-log曲線
3.3 聲暴露級的計(jì)算
式中:t0是基準(zhǔn)整合時(shí)間,計(jì)算為(t2-t1);A(t)是隨時(shí)間t變化的A計(jì)權(quán)聲壓;0是單位時(shí)間的基準(zhǔn)聲壓級。權(quán)聲壓級計(jì)算時(shí),可用如下公式求解:
其中LA(t)隨時(shí)間t變化的A計(jì)權(quán)聲壓級,以上兩式中t1-t2時(shí)間區(qū)間應(yīng)在10 dB降區(qū)間內(nèi)[18]。
為了進(jìn)一步加速計(jì)算,可以采用經(jīng)認(rèn)證的近似算法:
SEL=LAMAX+ΔA
其中ΔA可以根據(jù)下式計(jì)算:
ΔA=10log10(T)
其中T=(t2-t1)/2,LAMAX是10 dB降區(qū)間中A計(jì)權(quán)聲壓級的最大值。
3.4 高度為120 m的飛越噪聲測試
設(shè)定旋翼無人機(jī)的垂直高度為120 m,水平飛行速度為最大功率巡航速度。測試所得數(shù)據(jù)經(jīng)NoiseLab記錄并平滑處理后[19],見圖6。
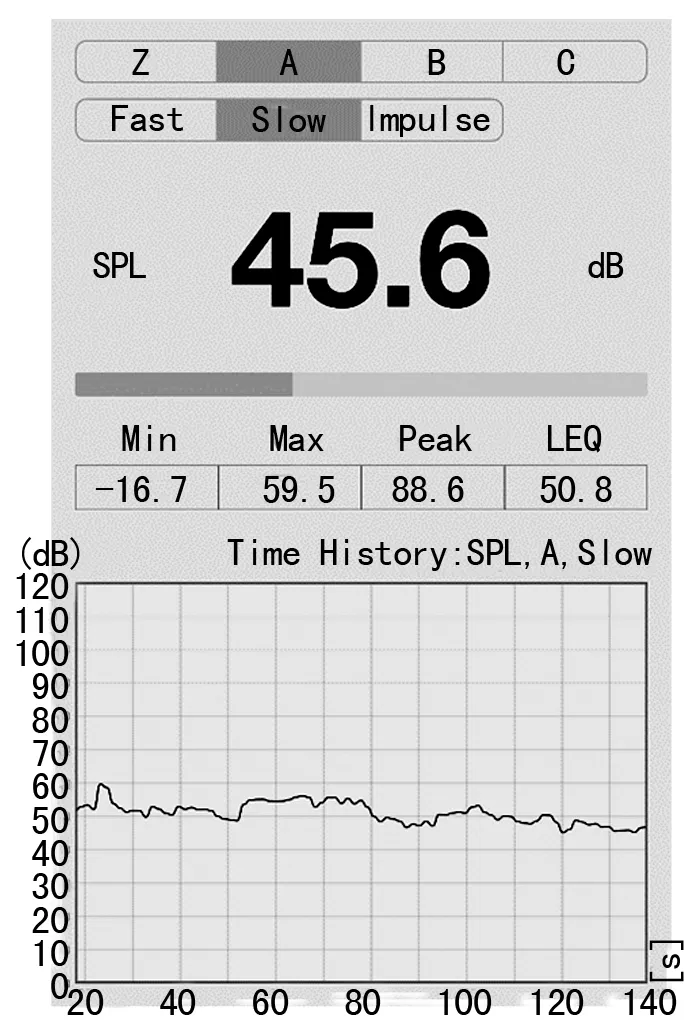
圖6 120 m高度下NoiseLab噪聲記錄界面
使用NoiseLab導(dǎo)出測得的噪聲數(shù)據(jù),根據(jù)公式:
采用認(rèn)證的近似算法,簡化計(jì)算過程后的數(shù)據(jù)如表1。

表1 高度為120 m的噪聲測試數(shù)據(jù)
由表1數(shù)據(jù)分析和圖6所示,明顯由于飛行高度過高,噪聲在傳播過程中衰減過大,因而無法確定10 dB降區(qū)間,同時(shí)A計(jì)權(quán)的最大聲壓級只超過環(huán)境噪聲1.7dB(A),因此遠(yuǎn)遠(yuǎn)無法滿足測試條件,其余的5組試驗(yàn)沒有必要再進(jìn)行。對于本款微小型無人機(jī)而言,120 m的垂直飛行測試高度過高,聲音衰減過大,故無法完成該高度下的噪聲測試,因而繼續(xù)降低垂直飛行高度進(jìn)行下一組測試。
3.5 高度為100 m的飛越噪聲測試
設(shè)定旋翼無人機(jī)的垂直高度為100 m,水平飛行速度為最大功率巡航速度。測試噪聲數(shù)據(jù)如表2。
測試結(jié)果與高度為120 m的結(jié)果類似,依然無法確定10 dB降區(qū)間,因此高度為100 m的距離也不適合本次微小型無人機(jī)噪聲測試。

表2 高度為100 m的噪聲測試數(shù)據(jù)
3.6 高度為50 m、10 m、5 m的飛越噪聲測試
分別設(shè)定旋翼無人機(jī)的垂直高度為50 m、10 m、5 m,水平飛行速度為最大功率巡航速度。測試噪聲數(shù)據(jù)經(jīng)過計(jì)算后如表3~5所列。
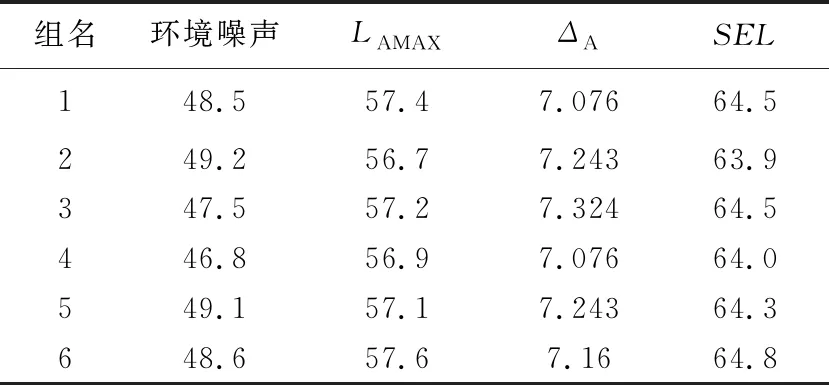
表3 高度為50 m的噪聲測試數(shù)據(jù)
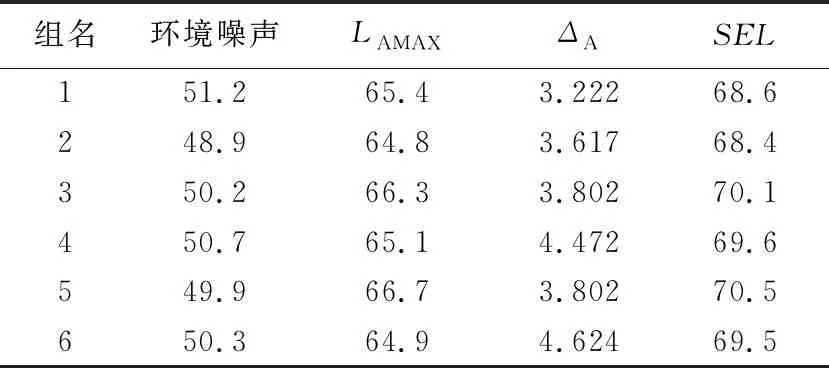
表4 高度為10 m的噪聲測試數(shù)據(jù)
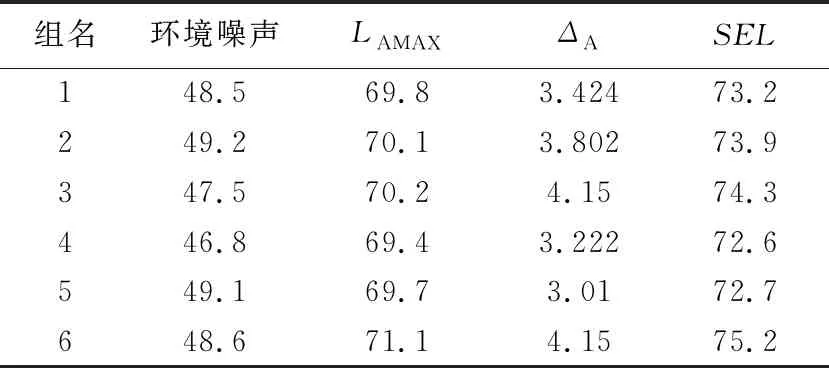
表5 高度為5 m的噪聲測試數(shù)據(jù)
計(jì)算后的數(shù)據(jù)表明,高度為50 m的測試中,只有第2組聲暴露級未超出環(huán)境噪聲15 dB(A)以上,不滿足本文研究的測試要求,而高度為10 m、5 m的聲暴露級都滿足條件要求。至少可見,針對文中測試的微小型旋翼無人機(jī),飛行高度在50 m以下時(shí)進(jìn)行測試是相對合適的。而高度為10 m、5 m的最終算得的聲暴露級完全滿足微小型旋翼無人機(jī)噪聲適航測試的要求。
對于50 m及其以下的三組數(shù)據(jù)進(jìn)行數(shù)據(jù)擬合,如圖7所示。而當(dāng)飛行高度為10 m時(shí),分析測試的10 dB降時(shí)間區(qū)間,即有效飛行時(shí)間(t2-t1)的數(shù)值如表6所示。
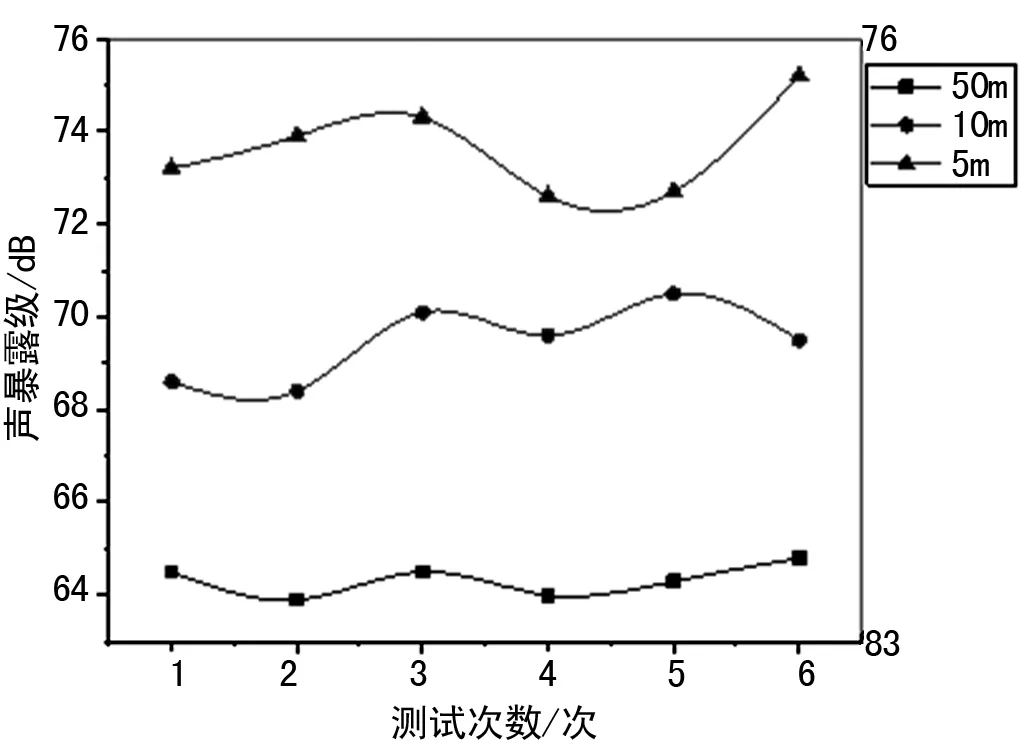
圖7 高度為50、10、5 m時(shí)的聲暴露級擬合比較

表6 高度為10 m的噪聲測試時(shí)間區(qū)間
4 結(jié)論與展望
對微小型無人機(jī)噪聲試驗(yàn)進(jìn)行探索,以《FAR-36》部中的附件J作為測試參考依據(jù)。進(jìn)行了五組環(huán)境和設(shè)備均符合要求的飛行試驗(yàn),初步探究了微小型旋翼無人機(jī)噪聲適航測試時(shí)適用的高度。結(jié)果表明:
(1) 需要調(diào)整微小型旋翼無人機(jī)的飛行高度來進(jìn)行試驗(yàn),否則噪聲數(shù)據(jù)受環(huán)境干擾大,數(shù)據(jù)可信度低,不可作為適航審定依據(jù)。從圖7中可以得出50 m高度測試時(shí),數(shù)據(jù)偏差較小,但這是由于該高度下旋翼無人機(jī)噪聲衰減較多,從而未能特別有效區(qū)分無人機(jī)本身噪聲與環(huán)境的干擾噪聲。而在5 m高度測試時(shí),10 dB降區(qū)間時(shí)間短,即測試時(shí)旋翼無人機(jī)有效飛行時(shí)間短,雖然聲暴露級在第六次測試時(shí)出現(xiàn)了相較于前五次明顯的偏差,但整體噪聲測試數(shù)據(jù)滿足測試要求。此次研究,受限于場地設(shè)備租用、計(jì)算過程量大、飛行報(bào)備等因素,每組高度進(jìn)行了6次測試,后續(xù)可通過增加測試組數(shù),或適當(dāng)提升飛行高度來盡可能減少隨機(jī)因素對于整體噪聲數(shù)據(jù)有效性的影響。而對于飛行高度為10 m的聲暴露級數(shù)據(jù),數(shù)據(jù)相對穩(wěn)定,旋翼無人機(jī)有效飛行時(shí)間和操作時(shí)間都相對充裕,有較強(qiáng)的抗干擾特性,比較適合進(jìn)行噪聲適航測試。
(2) 當(dāng)調(diào)整為合適的測試高度后,文中50 m以下時(shí),數(shù)據(jù)可信。特別是在高度為10 m和5 m時(shí),除了數(shù)據(jù)滿足高于環(huán)境噪聲規(guī)定值15 dB(A),同時(shí)避開了環(huán)境噪聲干擾的數(shù)值,由表6可見,時(shí)間區(qū)間長度對于聲樣采集來說,處于一個(gè)較為合適的區(qū)間,為5 s左右,能夠有效減少無人機(jī)控制過程中可能出現(xiàn)的影響,同時(shí)也不至于采樣時(shí)間太短而增加數(shù)據(jù)失真的幾率。
綜上所述,對于微小型旋翼無人機(jī)噪聲適航測試,可以利用飛行時(shí)聲暴露級的測試方法。在飛行測試時(shí),飛行高度對于噪聲數(shù)據(jù)采集的影響較大,本文通過對不同飛行高度的噪聲測試分析,研究了可供參考的微小型旋翼無人機(jī)噪聲測試方法,從而可以為微小型旋翼無人機(jī)噪聲測試分析研究,特別是適航測試方法的制定提供相關(guān)參考依據(jù)。
