基于Unity 3D 的吸力錨安裝工藝虛擬仿真系統*
2021-01-12 03:01:28柳依何顧繼俊
科技創新與應用 2021年2期
柳依何,顧繼俊
(中國石油大學(北京)機械與儲運工程學院,北京102249)
引言
近年來,隨著海洋油氣資源的探索需求日益增加,吸力錨作為一種新型海洋平臺的錨固基礎,憑借其施工簡便、可反復循環使用、施工周期短等優勢,在海上風力電機、海洋石油鉆井平臺以及浮桶定位等海洋工程結構物中被廣泛應用[1]。由于吸力錨造價昂貴、施工環境特殊,需對工程技術人員進行專門的操作培訓,傳統培訓方式受到設備緊缺、作業環境偏遠復雜等因素的限制,導致吸力錨施工人員的培養受到限制。針對傳統培訓方式所存在的諸多問題,對吸力錨安裝工藝進行研究,采用虛擬現實技術設計并開發出一套能夠模擬海洋環境中吸力錨的施工過程的仿真系統。
虛擬現實技術已被大量應用于工業領域的培訓當中,并取得了良好的效果。虛擬現實技術作為仿真技術的一個重要組成部分,由計算機圖形學、計算機仿真技術、人機交互技術、多媒體信息處理技術、信息傳感技術等多種技術有機融合,是一種依靠計算機網絡與信息傳感處理而進行運算的交叉性虛擬技術[2]。基于虛擬現實技術,美國紐約州立大學Ankur Baheti 等[3]開發了一套雙手6DoF虛擬現實培訓系統,通過DVSS 系統成功獲取各種腹腔鏡手術所需的基本技能。美國紐約哥倫比亞大學Baihan Lin[4]等提出了一種新的虛擬現實環境中的交互模式,此技術可應用于各直播應用、增強和虛擬現實設置,以提供交互式和沉浸式用戶體驗。澳大利亞格拉茲技術大學Matthias Eder[5]等開發了一套用于學習型工廠工作環境的培訓系統,并應用于格拉茲技術大學的培訓課程中。
本文對吸力錨安裝工藝過程進行了詳細研究,并基于Unity 3D 開發了一套海洋環境中吸力錨施工過程的仿真系統,該系統能夠為工程技術人員提供一個高沉浸感、交互性更強的虛擬仿真平臺、結合硬件設備能夠進行逼真的吸力錨施工過程操作教學和培訓。
1 虛擬仿真系統架構
該系統基于Unity 3D 進行總體架構,輔助Solidworks、3D Max 軟 件 共 同 實 現。Unity 3D 是 由Unity Technologies 公司開發的虛擬現實引擎,該軟件具有可視化編程界面、支持Open GL 和Direct11、集成了Phys X3.3 物理系統等眾多功能特點,所以在虛擬現實仿真領域具有廣泛應用[6]。該仿真系統框圖如圖1。
吸力錨安裝工藝仿真系統主要由前臺顯示子系統、人機交互系統組成。在前臺顯示子系統中,采用Solidworks 建模軟件對仿真過程中需要用到的作業船舶、吊機、吸力錨、水下機器人、海洋環境等進行建模,并在3D Max 軟件中將三維模型進行貼圖渲染后轉換為FBX 格式,為仿真真實海洋作業環境系統必要設施。在人機交互系統中,將前臺顯示的物理模型和虛擬場景植入到Unity 3D 虛擬現實引擎中,構建可進行人機交互的虛擬場景以及后臺數據實時更新的仿真平臺。
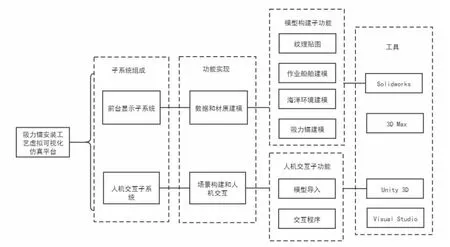
圖1 系統框圖
2 系統仿真關鍵技術
2.1 可視化仿真系統設計
仿真系統各功能模塊見得邏輯關系如圖2 所示。采用Unity 3D 作為仿真軟件對海面/海底中的物理環境和水動力進行仿真,通過C#語言編寫程序實現海洋環境、燈光系統、聲系統、水下粒子系統、水下機器人推進系統和吊機控制系統的仿真。通過多個傳感器采集吸力錨在安裝過程中的水平度、深度等數據,通過數據管理模塊對采集的數據進行管理。
2.2 軟件界面設計
在吸力錨實際作業過程中,工程技術人員需要通過ROV 實時對吸力錨上各種儀表的數據變化進行觀察,以保證吸力錨能進行正常的施工作業。本系統采用Unity 3D 自帶的GUI 組件對系統軟件的主界面和吸力錨作業界面進行了設計[7]。在UI 面板中,采用Panel 組件為系統主界面和吸力錨作業界面添加相應背景,新建一個Camera 只用于照射UI 界面,系統主界面如圖3 所示,系統主界面共包含3 個功能模塊,主要實現的功能包括:吸力錨的安裝工藝仿真、吸力錨的拆除工藝仿真、吸力錨的維修工藝仿真,采用C#語言對各功能模塊進行編程,點擊相應的按鍵系統界面會跳轉到對應的功能界面,點擊“退出”便可退出該系統。
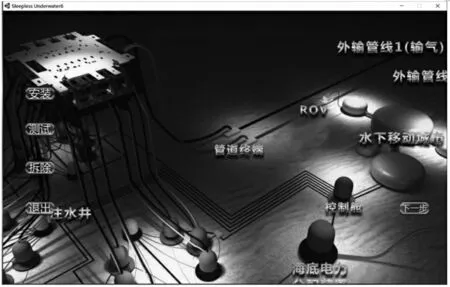
圖3 系統主界面
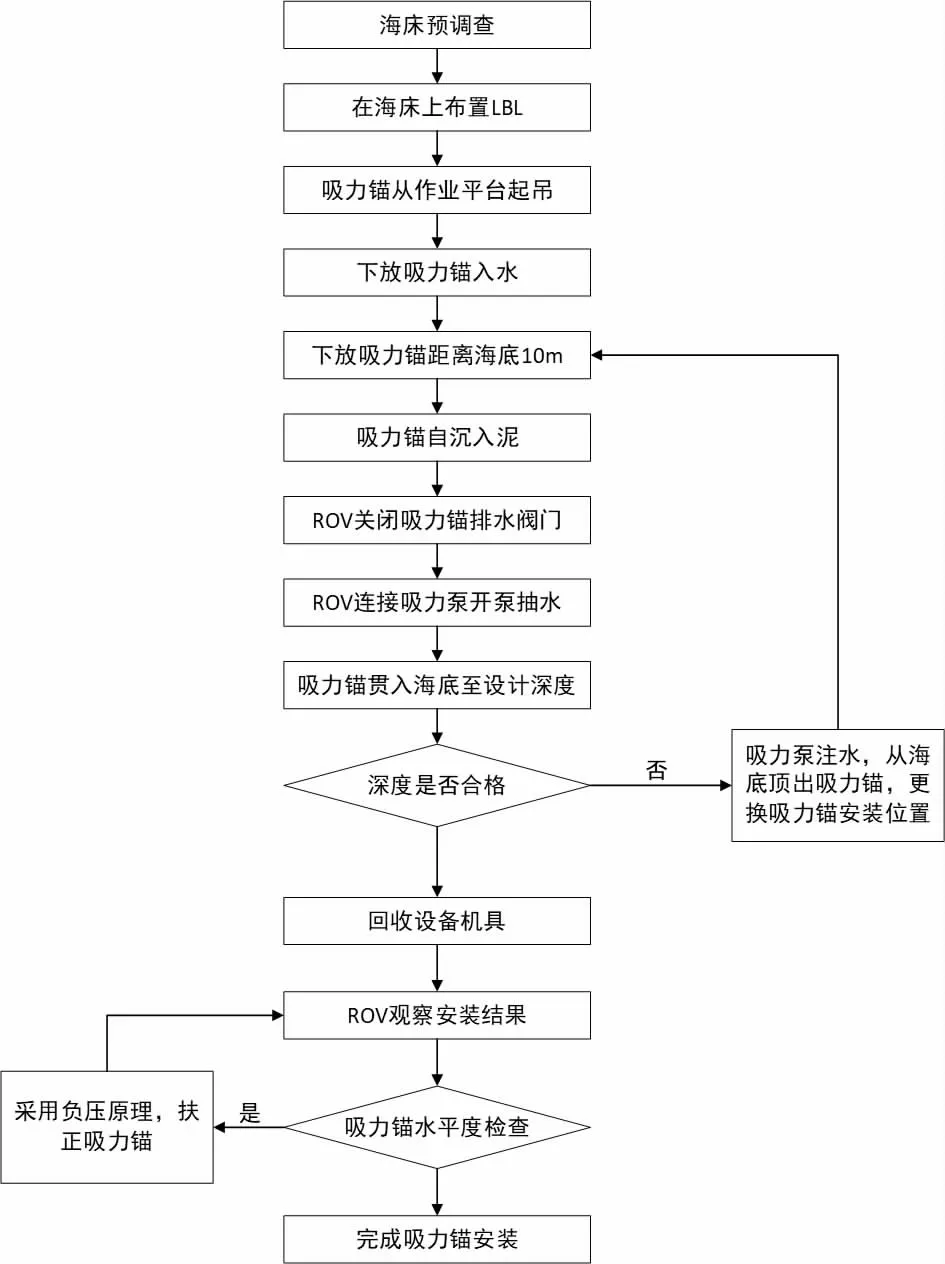
圖4 吸力錨安裝工藝
2.3 行為控制
行為控制主要有Camera 的視角控制、吊機的升降/旋轉控制、ROV 的運動控制。在視角控制中,用戶可以通過操作鍵盤來控制場景的遠近以及Camera 旋轉;在吊機的升降旋轉控制中,用戶可通過操作鍵盤來控制吊機的起吊旋轉;在ROV 的運動控制中,用戶可對ROV 的運動軌跡以及ROV 機械臂的伸縮旋轉進行控制。行為控制功能是通過C#語言編寫控制程序腳本,將控制腳本分別附加到需要控制的模型上來實現的。在腳本中,首先獲取按鍵信息,判斷鍵盤上用于控制模型運動的特定按鍵是否被按下,再根據按鍵信息執行相應的語句。例如當監測到鍵盤上的“A”鍵被按下時,系統會執行控制ROV 前進的語句,以此來實現交互控制[8]。
2.4 碰撞檢測
碰撞檢測功能在本系統中是至關重要的技術,在本系統中,ROV 上的機械手與泵閥開關之間的碰撞檢測功能,是操作人員能夠避免碰撞,實現機械手將泵閥開關順利打開的基礎。本系統的碰撞檢測算法采用網格碰撞體,即為ROV 上的機械手添加剛體組件和網格碰撞體,為泵閥系統開關添加網格碰撞體,并使用C#語言編寫程序,將程序腳本添加到機械手上即可實現碰撞檢測功能。在Unity 3D 中,當網格碰撞體發生相交、處于相交狀態和相交狀態取消時,會分別調用OnTriggerEnter()、On-TriggerStay()、OnTriggerExit()三個函數[9],從而實現碰撞檢測功能。
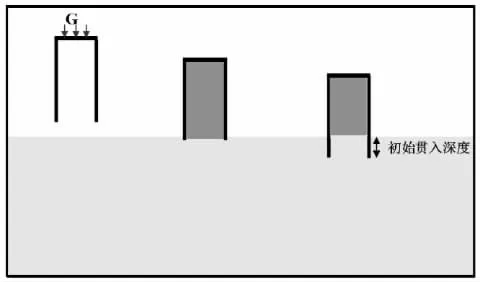
圖5 吸力錨自由貫入階段
3 安裝工藝研究及仿真
3.1 安裝工藝研究
為了使虛擬仿真過程中的工藝流程更加與實際相符,需要場景的模型運動控制與吸力錨的實際工藝流程一致,因此需對吸力錨的安裝工藝進行詳細研究,吸力錨安裝工藝如圖4 所示。
吸力錨的安裝工藝是一個相當復雜的過程,主要包括兩個階段,一是吸力錨在自身重力作用下的自由貫入階段(如圖5 所示),二是負壓貫入階段(如圖6 所示)。自由貫入階段即吸力錨在自身重力的作用下沉入海底預定位置,自由貫入之后吸力錨將有一個初始貫入深度,隨后進入負壓貫入階段,此時利用水泵將吸力錨內部的水泵吸到吸力錨外部,隨著吸力錨內部水的不斷排出,吸力錨內部和外部之間將形成壓差,此壓差即為施加在吸力錨上的吸力,當吸力達到一定程度后,克服吸力錨側壁摩擦阻力和端部阻力實現負壓貫入過程[10]。
吸力錨在貫入泥土過程中,還需通過ROV 對吸力錨上安裝的水平儀進行水平度檢測,水平度是影響吸力錨承載力的關鍵因素,挪威船級社要求吸力錨完成后的傾斜度不超過±5°[11],吸力錨貫入到設計深度以后,若水平度符合規范要求,則吸力錨安裝工藝施工完成,否則需采用負壓原理對吸力錨進行調平操作。單艙型筒型基礎一般需要依靠大型機械進行調平,而多筒型和多艙型筒型基礎可以通過向高艙處抽氣或低艙處注氣/水的方法進行調平,本系統仿真用到的吸力錨模型為單筒四艙型吸力錨,故在吸力錨下沉安裝過程中,通過ROV 上攝像頭觀測吸力錨的傾斜情況,并通過注水管線向吸力錨艙室內注水,通過調整各分艙氣壓來實現控制吸力錨的水平度,直至吸力錨沉貫完畢[12]。
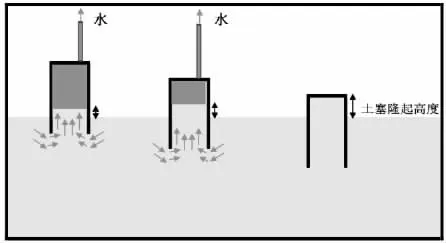
圖6 吸力錨負壓貫入階段
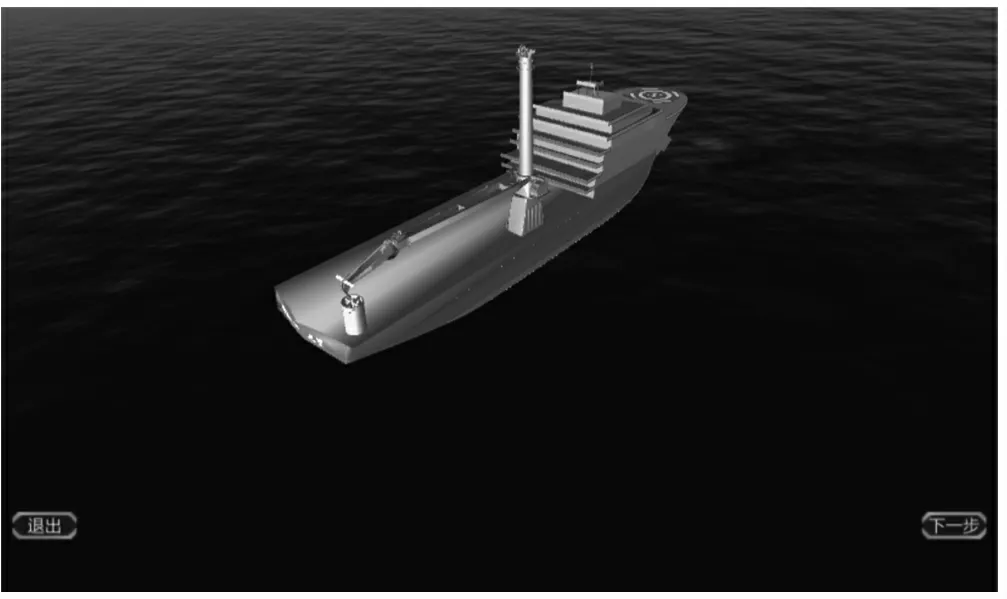
圖7 吸力錨等待入水
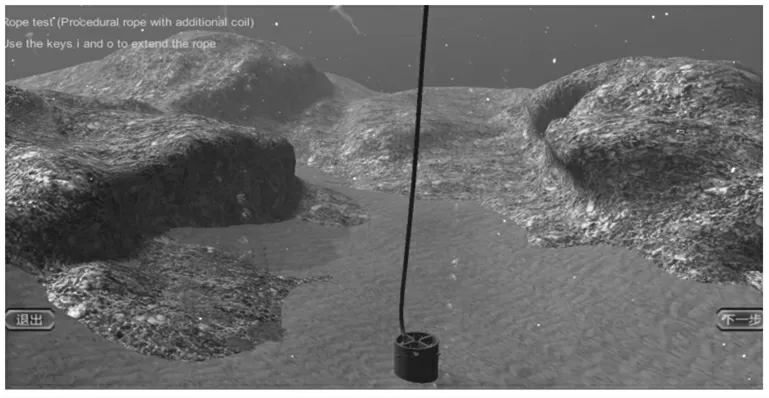
圖8 吸力錨自重貫入
3.2 虛擬仿真
對于吸力錨安裝工藝仿真,選擇更適合深水安裝的吊裝法對吸力錨進行安裝。使用286 作業船上的履帶吊將吸力錨及其他設備從碼頭建造場地吊放到286 船的甲板上,并進行固定。安裝船根據GPS 定位系統到達施工區域,用平臺吊機將吸力錨放在滑軌上,并運載到絞車附近;將吊索D 形環安裝在絞車繩上,為下水做準備,對安裝吊索施加拉力,確保吊索沒有發生扭轉,并沒有掛到吸力錨的其它部位,將吸力錨從平臺上吊起;將吸力錨移至平臺邊緣,如圖7 所示。
從安裝船緩慢放下吸力錨至水中;吸力錨入水后,通過作業船上的吊機將其下放至海床,吸力錨靠自重入泥深度約5m,自重貫入過程中,要使用吊機上的吊鉤控制吸力錨的偏移,保證自重貫入的垂直度,并通過注水/氣管線控制吸力錨的水平度[13]。吸力錨自重貫入過程如圖8所示。
吸力錨自重入泥完成后,通過ROV 上的機械手打開吸力錨上的泵閥開關(如圖9 所示),啟動泵閥系統,使吸力錨繼續貫入并進行多視角觀測,并同時通過負壓原理對吸力錨的水平度進行控制,當ROV 觀測到吸力錨貫入到10m 深度時,ROV 機械手關閉吸力錨的泵閥開關,暫停貫入工作。ROV 通過機械手打開吸力錨筒頂的入孔蓋,開始清泥作業。清泥深度0.5~0.6m,誤差控制±150mm,以滿足吸力錨頂面標高的設計要求。清泥完成后,ROV 再次打開吸力錨上的泵閥開關,將吸力錨貫入至設計深度并進行水平度測試,根據挪威船級社要求吸力錨完成后的傾斜度不超過±5°,如圖10 所示,本次測試中吸力錨的傾斜度為4°,測試成功。
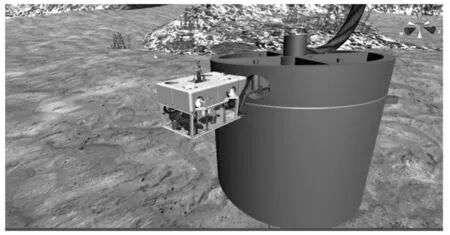
圖9 ROV 打開泵閥系統
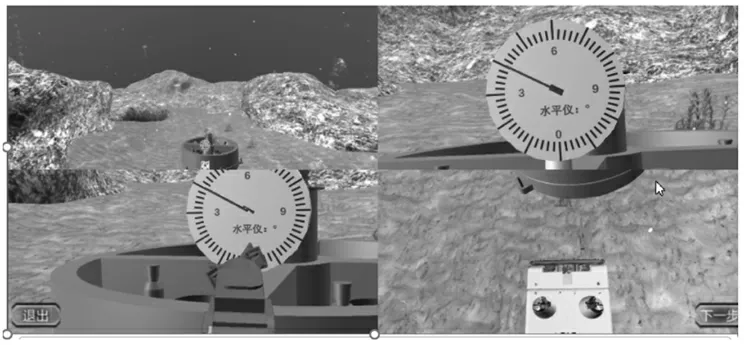
圖10 水平度測試
4 結束語
本文主要對吸力錨安裝工藝進行了研究,通過Solidworks 三維建模以及3D Max 貼圖渲染,使用C#語言進行虛擬現實系統的設計,開發了一套基于Unity 3D引擎的吸力錨安裝工藝虛擬仿真系統,并對安裝過程進行了測試,測試結果符合工藝要求。該系統具有功能齊全、界面美觀、可操作性強,便于進行二次開發等優點,各功能模塊嚴格遵循吸力錨實際安裝工藝要求。
猜你喜歡
當代陜西(2020年13期)2020-08-24 08:22:02
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
山東冶金(2019年6期)2020-01-06 07:45:54
世界農藥(2019年2期)2019-07-13 05:55:12
制造技術與機床(2017年5期)2018-01-19 02:49:17
濰坊學院學報(2016年2期)2016-12-01 13:00:11
故事大王(2016年7期)2016-09-22 17:30:08
銅業工程(2015年4期)2015-12-29 02:48:39
新聞傳播(2015年11期)2015-07-18 11:15:04
石油化工應用(2014年8期)2014-03-11 17:40:03