面向海洋環(huán)境觀測的最大似然浮標(biāo)定位方法
2021-01-11 13:28:06羅清華
無線互聯(lián)科技 2020年22期
羅清華,宋 楊
(1. 哈爾濱工業(yè)大學(xué)(威海),山東 威海 264209;2.山東船舶技術(shù)研究院,山東 威海 264209;3.山東省威海生態(tài)環(huán)境監(jiān)測中心,山東 威海 264200)
0 引言
浮標(biāo)是海洋觀測的重要手段之一。為了實(shí)現(xiàn)細(xì)粒度的海洋環(huán)境參數(shù)觀測,往往需要在觀測區(qū)域部署大量的浮標(biāo)。然而沒有位置信息的浮標(biāo)觀測數(shù)據(jù)是沒有意義的,浮標(biāo)觀測數(shù)據(jù)的準(zhǔn)確位置信息對于漁業(yè)生產(chǎn)調(diào)度、搜救、預(yù)警、突發(fā)事件處理、行為決策等應(yīng)用提供重要的決策支持信息,因此需要對浮標(biāo)的位置進(jìn)行精確定位。
目前基于北斗或全球定位系統(tǒng)(Global Position System,GPS)等衛(wèi)星導(dǎo)航系統(tǒng)(Global Navigation Satellite System, GNSS)均能提供相關(guān)的定位服務(wù),然而從成本角度考慮,一般采用的辦法是:在觀測區(qū)域內(nèi)少量的浮標(biāo)裝備GNSS定位設(shè)備,然而通過浮標(biāo)間的無線通信和它們之間的幾何約束關(guān)系,并結(jié)合特定的定位方法,即可實(shí)現(xiàn)對其他浮標(biāo)節(jié)點(diǎn)的定位。
然而在海洋觀測環(huán)境中,由于浮標(biāo)比較貼近海面,無線電信號(hào)在傳輸過程中衰減較為嚴(yán)重,且其非線性衰減模型較為復(fù)雜,由于環(huán)境噪聲,以及無線信號(hào)傳輸過程中面臨的反射、多徑、非線性衰減等負(fù)面因素的影響[1-3],導(dǎo)致未知浮標(biāo)(位置信息未知,要定位的浮標(biāo))與各個(gè)參考浮標(biāo)(位置信息已知的浮標(biāo))間的距離估計(jì)值存在不同程度的誤差,導(dǎo)致定位精度較低。針對該問題,一些改進(jìn)的方法也不斷提出,例如文獻(xiàn)[2]采用統(tǒng)計(jì)均值作為距離估計(jì)結(jié)果。文獻(xiàn)[3-5]則假定距離值較小的誤差也較小,選擇距離值較小的參與定位計(jì)算,然而這種假設(shè)與實(shí)際情況不一定一致,使得改善程度有限。
基于此,為了提高浮標(biāo)的定位精度,本文從距離估計(jì)誤差傳播到定位結(jié)果的機(jī)理出發(fā),提出了基于最小標(biāo)準(zhǔn)差和優(yōu)化選擇的最大似然定位方法(Maximum Likelihood method through Minimum Standard Deviation and Optimization Selection,ML-MSDOS)。該方法的基本思路是:首先采用基于nanoLoc雙邊對等雙向測距(Symmetric Double Sided Two Way Ranging,SDS-TWR)方法多次測量未知浮標(biāo)到各個(gè)參考浮標(biāo)間的距離;然后對各個(gè)參考浮標(biāo)對應(yīng)的距離估計(jì)值進(jìn)行統(tǒng)計(jì)計(jì)算,獲得統(tǒng)計(jì)均值和統(tǒng)計(jì)標(biāo)準(zhǔn)差,采用優(yōu)化的策略,選擇出統(tǒng)計(jì)標(biāo)準(zhǔn)差較小的距離估計(jì)值,從而優(yōu)化選擇出參與定位計(jì)算的距離估計(jì)值及對應(yīng)的浮標(biāo)節(jié)點(diǎn);最后采用最大似然定位計(jì)算方法獲得高精度的定位。
1 最大似然定位方法ML-MSDOS
ML-MSDOS最大似然定位方法的系統(tǒng)結(jié)構(gòu)主要包括通信距離估計(jì)、質(zhì)量評估、優(yōu)化選擇、最大似然定位計(jì)算四個(gè)部分,如圖1所示。

圖1 改進(jìn)最大似然定位方法
距離估計(jì)如圖2所示,未知浮標(biāo)與參考浮標(biāo)間的距離可以通過公式(1)獲得:
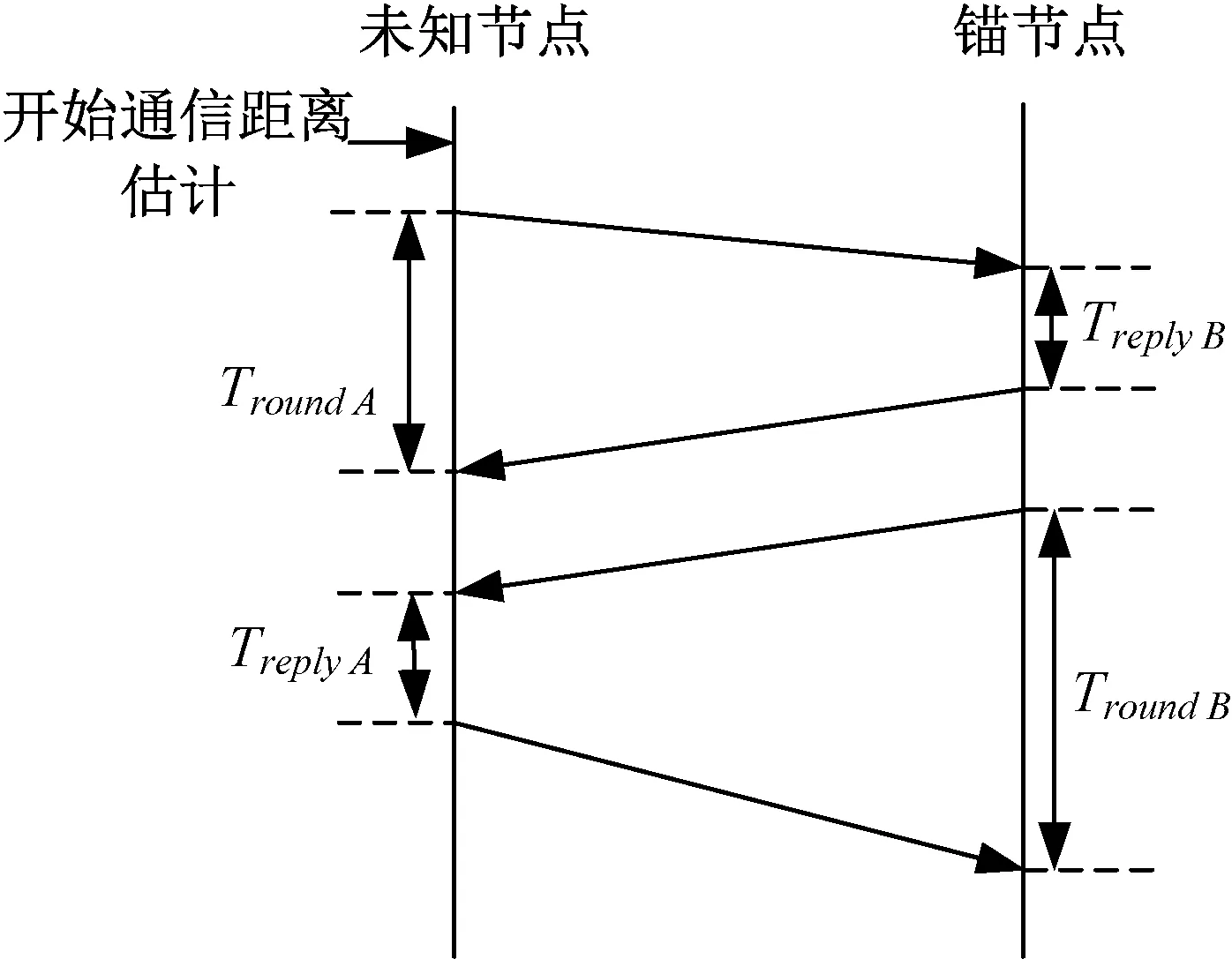
圖2 雙向?qū)Φ入p邊測量原理示意圖
(1)
在定位環(huán)境中,對于第i個(gè)參考浮標(biāo),重復(fù)J次測量其與未知浮標(biāo)間的距離,獲得距離估計(jì)序列di={di1,di2,di3, …,dij, …,diJ},其中,i表示參考浮標(biāo)的序號(hào),i為正整數(shù), 1≤i≤I,I為系統(tǒng)中參考浮標(biāo)的數(shù)量,本文中I取值為10,j為正整數(shù),表示重復(fù)測量的序號(hào),1≤j≤J,J為正整數(shù),表示重復(fù)測量的次數(shù),為了保證統(tǒng)計(jì)特性,本文J取值100次,dij表示第i個(gè)參考浮標(biāo)的第j次的距離測量值。
按照同樣的思路,系統(tǒng)重復(fù)測量未知浮標(biāo)到各個(gè)參考浮標(biāo){A1,A2,A3, …,Ai, …,AI}間的通信距離J次,分別獲得距離估計(jì)值序列:d1={d11,d12,d13, …,d1j, …,d1J},d2={d21,d22,d23, …,d2j, …,d2J},R3={d31,d32,d33, …,d3j, …,d3J},…,di={di1,di2,di3, …,dij, …,diJ},…,dI={dI1,dI2,dI3, …,dIj, …,dIJ}, 其中i為正整數(shù),1≤i≤I,j為正整數(shù),表示重復(fù)測量的序號(hào),1≤j≤J。
對上述的距離估計(jì)值序列進(jìn)行統(tǒng)計(jì)計(jì)算,如公式(2)和公式(3),分別獲得其對應(yīng)的統(tǒng)計(jì)均值序列d_u={d1_u,d2_u,d3_u, …,di_u, …,dI_u},以及統(tǒng)計(jì)標(biāo)準(zhǔn)差序列d_σ={d1_σ,d2_σ,d3_σ,…,di_σ, …,dI_σ},其中di_u表示第i個(gè)參考浮標(biāo)與未知浮標(biāo)間的距離統(tǒng)計(jì)均值,di_σ表示第i個(gè)參考浮標(biāo)與未知浮標(biāo)間的距離標(biāo)準(zhǔn)差。
(2)
(3)
將獲得的統(tǒng)計(jì)均值序列d={d1_u,d2_u,d3_u, …,di_u, …,dI_u}作為距離估計(jì)結(jié)果,將獲得的統(tǒng)計(jì)標(biāo)準(zhǔn)差序列d_σ={d1_σ,d2_σ,d3_σ,…,di_σ, …,dI_σ}作為各個(gè)距離估計(jì)結(jié)果的質(zhì)量(根據(jù)誤差理論和統(tǒng)計(jì)分析理論,統(tǒng)計(jì)標(biāo)準(zhǔn)差表征測量精度)。
本文基于最小標(biāo)準(zhǔn)差,采用冒泡排序法從I個(gè)距離估計(jì)結(jié)果{d1_u,d2_u,d3_u, …,di_u, …,dI_u}中,優(yōu)化選擇出K個(gè)高質(zhì)量的距離估計(jì)值{d’1_u,d’2_u,d’3_u, …,d’k_u, …,d’K_u}及其對應(yīng)的參考浮標(biāo){A’1,A’2,A’3, …,A’k, …,A’K},其中k表示優(yōu)化選擇后參考浮標(biāo)的序號(hào),k為正整數(shù), 1≤k≤K,K為用戶指定的最大似然定位計(jì)算中方程的個(gè)數(shù),K正整數(shù),K≤I。
在優(yōu)化選擇得到的參考浮標(biāo){A’1,A’2,A’3, …,A’k, …,A’K},及其對應(yīng)的坐標(biāo){(x1,y1),(x2,y2), (x3,y3),…, (xk,yk),…, (xK,yK)}以及距離估計(jì)結(jié)果{d’1_u,d’2_u,d’3_u, …,d’k_u, …,d’K_u},列最大似然定位方程,如公式(4)所示:
(4)
(5)
基于公式(5),獲得未知浮標(biāo)的定位結(jié)果。
2 性能評估與分析
在室內(nèi)、大廳和室外3種典型的定位環(huán)境中,采用基于nano PAN 5375RF射頻收發(fā)器的nanoLOC無線節(jié)點(diǎn)進(jìn)行距離估計(jì)和定位驗(yàn)證。
評估過程中采用的計(jì)算平臺(tái)參數(shù)為:CPU:Intel i7 720QM@1.6 GHz,內(nèi)存:4 G,操作系統(tǒng):Windows XP Professional SP3,實(shí)驗(yàn)評估環(huán)境為Matlab 2009b。
應(yīng)用本文提出的定位方法進(jìn)行定位計(jì)算,評估其定位精度,和隨機(jī)距離值選取和距離值最小優(yōu)化選擇的最大似然比較,定位誤差如圖3所示。
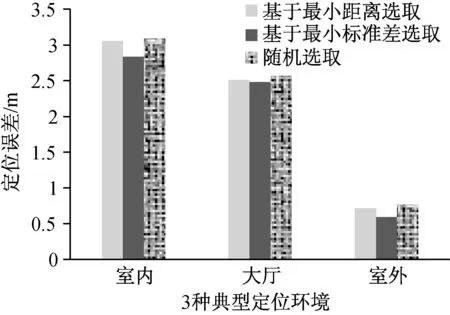
圖3 3種實(shí)際定位環(huán)境部署
從圖3可以看出,相對于其他定位方法,本文提出的定位方法具有較高的定位精度。相對于隨機(jī)選取和距離值最小優(yōu)化選擇的最小定位方法,本文提出的最小標(biāo)準(zhǔn)差和優(yōu)化選擇的最大似然定位方法分別提高定位精度11.69%和8.73%,這主要由于本文從誤差影響機(jī)理出發(fā),優(yōu)化選擇誤差較小的距離值參與定位計(jì)算,從而獲得較高的定位精度。
3 結(jié)語
針對距離估計(jì)誤差較大,導(dǎo)致定位較低的問題,本文提出了基于最小標(biāo)準(zhǔn)差的參考浮標(biāo)優(yōu)化選擇的最大似然定位方法。 實(shí)驗(yàn)結(jié)果表明,本文提出的定位方法在特定實(shí)際環(huán)境下,可改善估計(jì)誤差,具有較高的定位精度。 該方法也為其他定位方法的精度改善提供重要借鑒和參考。
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50
兒童故事畫報(bào)(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56