自動(dòng)噴霧小車(chē)控制系統(tǒng)的設(shè)計(jì)與實(shí)現(xiàn)
2021-01-01 02:15:17王帥葉芝蓓陳明健徐辰曉李鑫東
科技風(fēng) 2021年34期
關(guān)鍵詞:單片機(jī)
王帥 葉芝蓓 陳明健 徐辰曉 李鑫東

摘要:本設(shè)計(jì)以STM32F103ZET6芯片為核心,搭配L298N芯片、電壓比較器、XKT-201芯片等設(shè)計(jì)了一款具有噴霧功能的智能小車(chē)。其中,使用L298N控制四個(gè)直流電機(jī)帶動(dòng)四輪構(gòu)成電機(jī)驅(qū)動(dòng)模塊;以電壓比較器為核心結(jié)合紅外發(fā)射頭和紅外接收頭組成循跡及避障模塊;采用XKT-201芯片使霧化片振動(dòng)將液體打散實(shí)現(xiàn)噴霧功能;利用三極管、變壓器及音效芯片組成水位警報(bào)模塊;使用STM32F103ZET6芯片對(duì)循跡避障模塊接收到的數(shù)據(jù)進(jìn)行運(yùn)算進(jìn)而控制電機(jī)驅(qū)動(dòng)模塊,并為各個(gè)模塊供電。經(jīng)過(guò)調(diào)試此智能?chē)婌F小車(chē)基本能實(shí)現(xiàn)循跡避障噴霧以及低水位報(bào)警功能。
關(guān)鍵詞:?jiǎn)纹瑱C(jī);循跡避障系統(tǒng);自動(dòng)噴霧;水位檢測(cè)
1緒論
在病毒傳播過(guò)程中,飛沫傳播與接觸傳播是其主要傳播方式,而在這二者中很大一部分感染者又是由于接觸到物體表面上附著的病毒后才感染的,因此針對(duì)病毒的這一傳播特性,本設(shè)計(jì)通過(guò)將循跡避障小車(chē)與噴霧系統(tǒng)相結(jié)合形成自動(dòng)噴霧小車(chē)系統(tǒng),來(lái)代替人工進(jìn)行小區(qū)等公共場(chǎng)所的消毒工作,為公共衛(wèi)生提供更為安全高效的消殺方法。
本文設(shè)計(jì)的小車(chē)通過(guò)STM32單片機(jī)作為主控制芯片;由PID算法控制小車(chē)行進(jìn)電機(jī)的工作;紅外傳感器的使用實(shí)現(xiàn)循跡避障功能;XKT-201芯片對(duì)于噴霧模塊的控制;有線(xiàn)水浸探測(cè)器和聲光報(bào)警器的結(jié)合實(shí)現(xiàn)對(duì)水箱水位的監(jiān)測(cè)以及低水位報(bào)警,從而進(jìn)行安全有效的消毒工作。
2自動(dòng)噴霧小車(chē)控制系統(tǒng)的方案設(shè)計(jì)
2.1需求分析
2.1.1循跡功能
(1)能夠自動(dòng)搜索地面上白底黑線(xiàn)進(jìn)行循跡行駛。
(2)在小車(chē)正常運(yùn)行的時(shí)候不能脫離給定的路線(xiàn)。
(3)在小車(chē)運(yùn)行過(guò)程中出現(xiàn)軌跡偏移時(shí),能夠自動(dòng)調(diào)整方向繼續(xù)行駛。
2.1.2避障功能
當(dāng)小車(chē)監(jiān)測(cè)到周?chē)?0cm內(nèi)有障礙物時(shí),能夠自動(dòng)停車(chē)并等待障礙物離開(kāi)。
2.1.3噴霧功能
當(dāng)小車(chē)運(yùn)行時(shí),噴霧工作,當(dāng)小車(chē)停止時(shí),噴霧停止。
2.1.4水位監(jiān)測(cè)功能
當(dāng)噴霧水位到達(dá)預(yù)設(shè)的低水位時(shí),發(fā)出警報(bào)。
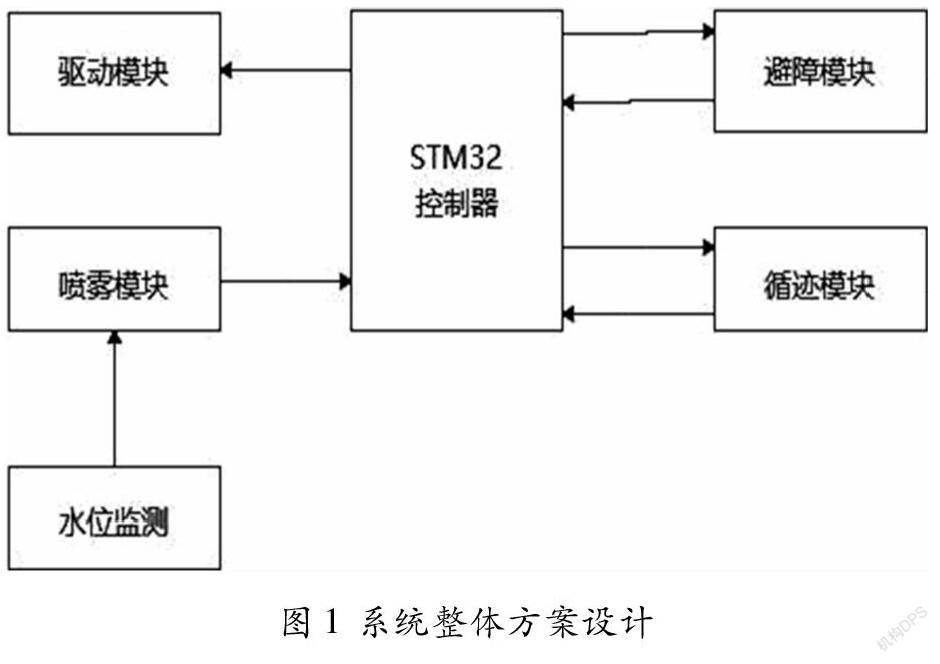
2.2總體方案設(shè)計(jì)
通過(guò)主控模塊實(shí)現(xiàn)對(duì)其他模塊的控制,在驅(qū)動(dòng)模塊初始化后,開(kāi)啟循跡模塊和噴霧模塊,搜索給定路線(xiàn)進(jìn)行行駛,實(shí)時(shí)監(jiān)測(cè)障礙物,如遇障礙物則開(kāi)啟避障模塊,停止行駛,當(dāng)障礙物離開(kāi)則關(guān)閉避障模塊,返回循跡模塊。以循跡模塊的行駛信號(hào)控制噴霧模塊,實(shí)現(xiàn)隨動(dòng)隨噴,當(dāng)監(jiān)測(cè)到水位達(dá)到預(yù)警水位時(shí),關(guān)閉噴霧,提示加液。
3系統(tǒng)硬件設(shè)計(jì)
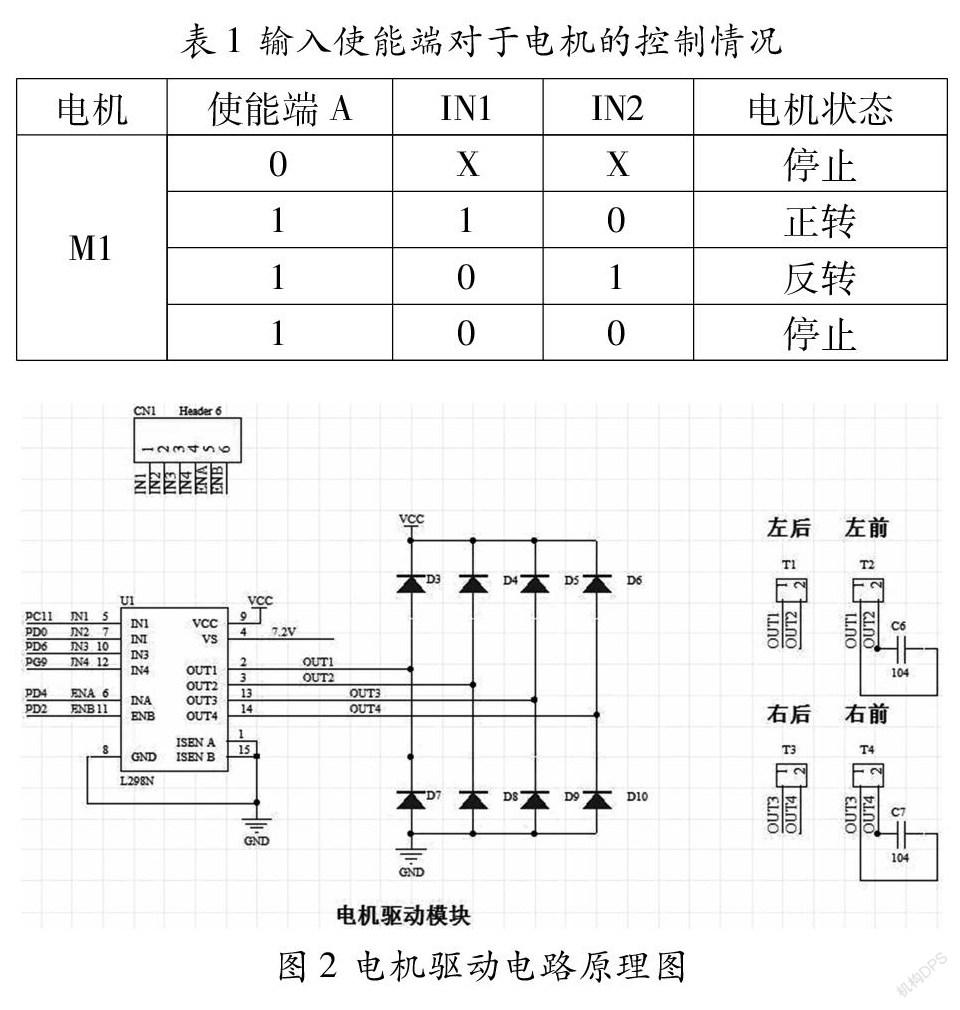
3.1驅(qū)動(dòng)模塊電路設(shè)計(jì)
以L(fǎng)298N芯片為電機(jī)驅(qū)動(dòng)模塊控制核心,N1~I(xiàn)N4作為輸入端,由STM32F103ZET6芯片控制;ENA和ENB為使能端,分別通過(guò)PWN控制兩個(gè)直流電機(jī)轉(zhuǎn)速;OUT1~OUT4為輸出端,根據(jù)輸入端和使能端的信號(hào)控制兩個(gè)直流電機(jī)的運(yùn)動(dòng)狀態(tài),具體情況如表1;將ISENA及ISENB接地實(shí)現(xiàn)電流閉環(huán)控制;輸出端都接有二極管一釋放電機(jī)停止或轉(zhuǎn)向時(shí)產(chǎn)生的反向感生電動(dòng)勢(shì);OUT1/2與OUT3/4實(shí)質(zhì)上分別控制了左前后與右前后兩個(gè)直流電機(jī),所以左前后輪的運(yùn)動(dòng)狀態(tài)一樣,右前后輪的運(yùn)動(dòng)狀態(tài)一樣;當(dāng)左兩輪正轉(zhuǎn)右兩輪反轉(zhuǎn)時(shí)實(shí)現(xiàn)小車(chē)右轉(zhuǎn)彎,當(dāng)左兩輪反轉(zhuǎn)右兩輪正轉(zhuǎn)時(shí)實(shí)現(xiàn)小車(chē)左轉(zhuǎn)彎,全部正轉(zhuǎn)實(shí)現(xiàn)小車(chē)前進(jìn),全部反轉(zhuǎn)實(shí)現(xiàn)小車(chē)后退。L298N各引腳具體連接方式如圖2所示。
3.2循跡模塊電路設(shè)計(jì)
采用三路紅外發(fā)射接收模塊實(shí)現(xiàn)黑線(xiàn)循跡功能,與避障功能的實(shí)現(xiàn)類(lèi)似,調(diào)試出合適的避障距離后,由于黑線(xiàn)對(duì)紅外線(xiàn)的吸收強(qiáng),導(dǎo)致發(fā)射出的紅外線(xiàn)不能反射后被接收管接收。將三路紅外發(fā)射接收模塊置于車(chē)底,當(dāng)紅外線(xiàn)遇到黑線(xiàn),無(wú)反射,輸出一個(gè)高電平,指示燈滅;當(dāng)紅外線(xiàn)遇到光亮的地面時(shí),反射給接收管,經(jīng)過(guò)放大電路后進(jìn)行電壓比較,輸出一個(gè)低電平,指示燈亮。且兩種情況下都通過(guò)OUT口將信息傳輸給單片機(jī),單片機(jī)經(jīng)過(guò)邏輯運(yùn)算控制電機(jī)驅(qū)動(dòng)模塊,實(shí)現(xiàn)循跡功能。
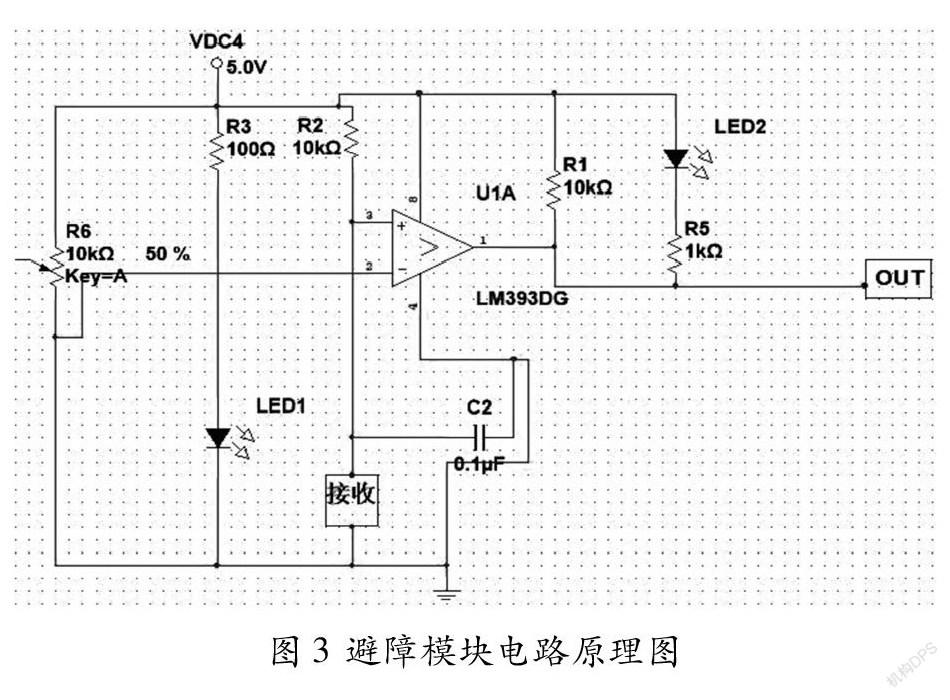
3.3避障模塊電路設(shè)計(jì)
使用兩路紅外發(fā)射接收模塊實(shí)現(xiàn)避障功能,紅外發(fā)射管發(fā)射固定頻率紅外線(xiàn),若遇到障礙物反射被接收管接收,經(jīng)過(guò)放大電路后通過(guò)電壓比較器,輸出一個(gè)低電平,使得LED燈導(dǎo)通點(diǎn)亮,并且通過(guò)OUT口將低電平信號(hào)傳輸給單片機(jī),單片機(jī)收到信號(hào)后根據(jù)編寫(xiě)的程序給電機(jī)驅(qū)動(dòng)模塊發(fā)送指令,完成避障。若前方無(wú)障礙物則輸出一高電平,LED燈不導(dǎo)通。通過(guò)調(diào)節(jié)兩個(gè)電位器的大小改變發(fā)射功率,進(jìn)而改變避障檢測(cè)的距離,電路圖如圖3所示。
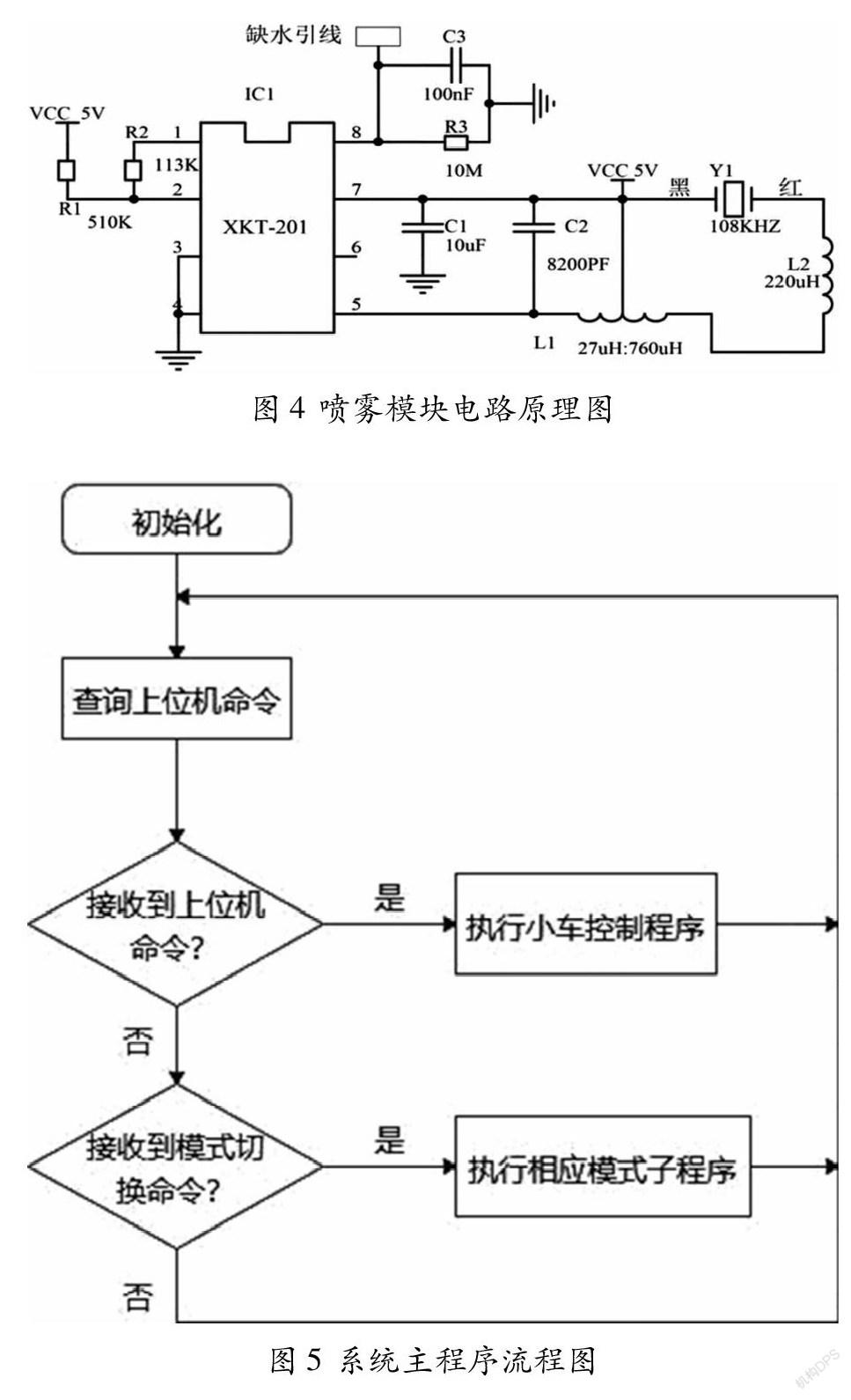
3.4噴霧模塊電路設(shè)計(jì)
本模塊設(shè)計(jì)采用XKT-201芯片,該芯片的工作電壓為5V,本設(shè)計(jì)中的STM32芯片由兩節(jié)3.7V鋰電池供電,經(jīng)過(guò)STM32芯片的7.4V~5V變壓電路轉(zhuǎn)變?yōu)?V電壓輸出口作為XKT-201芯片的電源輸入口,芯片設(shè)計(jì)工作頻率為108KHz,連接霧化片,使霧化片高頻振動(dòng),水滴被震動(dòng)打散后以霧的形式噴灑出去,其內(nèi)部電路原理圖如圖4所示。芯片還預(yù)留了水位監(jiān)測(cè)控制腳(8腳),可實(shí)現(xiàn)枯水?dāng)嚯姡员Wo(hù)霧化片不會(huì)因?yàn)槿彼蔁ū驹O(shè)計(jì)中未使用該功能)。
4系統(tǒng)軟件設(shè)計(jì)
4.1主程序設(shè)計(jì)
系統(tǒng)進(jìn)行初始化后,等待上位機(jī)命令的到來(lái)。其中初始化包括對(duì)時(shí)鐘、串口、延時(shí)、中斷等命令的初始化。然后啟動(dòng)小車(chē)的控制程序,當(dāng)模式切換命令到來(lái)時(shí),執(zhí)行其所對(duì)應(yīng)的控制子程序。
4.2驅(qū)動(dòng)模塊
驅(qū)動(dòng)電機(jī)的速度通過(guò)PWM波來(lái)進(jìn)行控制,將PWM波經(jīng)過(guò)處理后傳遞給L298N,控制電機(jī)的IN1口和IN2口的電平,實(shí)現(xiàn)電機(jī)的正轉(zhuǎn)、反轉(zhuǎn)、停止的功能。
4.3循跡模塊
采用B4、B5、B6這3個(gè)引腳分別接到三路紅外模塊的左中右個(gè)D0口上,再調(diào)用函數(shù)讀取引腳電平即完成跑道信息處理,如讀取到某個(gè)DO口為低電平,調(diào)用對(duì)應(yīng)的函數(shù),通過(guò)改變IN1和IN2口的電平,改變輪速,實(shí)現(xiàn)小車(chē)轉(zhuǎn)向與速度控制,如stm32讀取到小車(chē)使能信號(hào)為低電平則停車(chē),否則繼續(xù)上述循環(huán)。
4.4避障模塊
采用B1、B2這2個(gè)引腳分別接到兩個(gè)兩路紅外發(fā)射接收管的DO口上,再調(diào)用函數(shù)讀取引腳電平實(shí)現(xiàn)障礙物的紅外檢測(cè),如讀取到DO口為低電平,即前方存在障礙物。則調(diào)用函數(shù)carstop,設(shè)置IN1和IN2口為低電平,實(shí)現(xiàn)小車(chē)停止。每隔10ms進(jìn)行一次障礙物紅外檢測(cè),更新讀取的電平值。
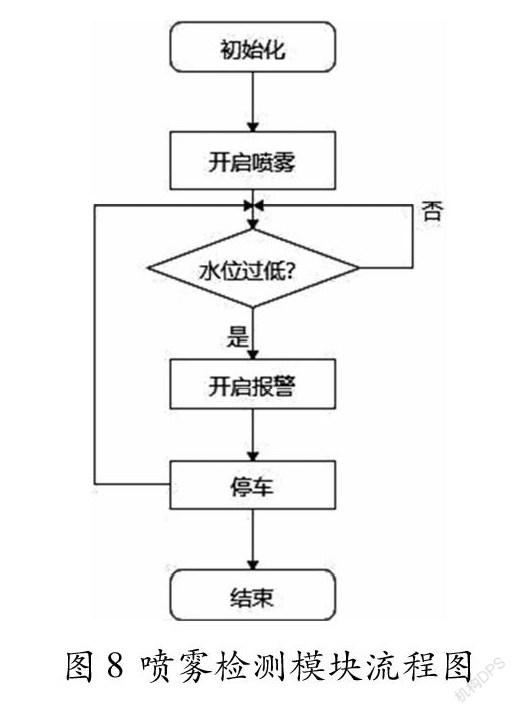
4.5噴霧監(jiān)測(cè)模塊
水位低于預(yù)設(shè)水位時(shí),水位監(jiān)測(cè)器的常開(kāi)觸點(diǎn)輸出端OUT為高電平,此高電平傳輸至聲光報(bào)警器的輸入端IN,開(kāi)啟聲光報(bào)警器進(jìn)行報(bào)警,同時(shí)將此輸出反相后,傳輸至IN1與IN2端實(shí)現(xiàn)小車(chē)停止。每隔10nm更新一次水位監(jiān)測(cè)器的常開(kāi)觸點(diǎn)輸出端OUT電平,實(shí)現(xiàn)持續(xù)監(jiān)測(cè)。
5系統(tǒng)調(diào)試
在實(shí)驗(yàn)過(guò)程中,發(fā)現(xiàn)循跡與避障兩部分的代碼會(huì)產(chǎn)生沖突,出現(xiàn)只循跡不避障或者只避障不循跡的情況,最終采用將循跡作為主循環(huán),避障作為輔助功能設(shè)置的方法成功解決了問(wèn)題。在后續(xù)水位監(jiān)測(cè)模塊拓展的實(shí)驗(yàn)中,發(fā)現(xiàn)僅僅通過(guò)小車(chē)的兩節(jié)3.7V鋰電池供電沒(méi)辦法使所有的功能都正常運(yùn)行,故通過(guò)一塊12V的外加電源成功解決了電源的問(wèn)題。最后,經(jīng)過(guò)整體的調(diào)試完善后,本系統(tǒng)全部的功能基本都已得到實(shí)現(xiàn)。
作者簡(jiǎn)介:王帥(2000— ),男,漢族,安徽淮南人,本科在讀,研究方向:通信工程;葉芝蓓(2000— ),女,漢族,浙江寧波人,本科在讀,研究方向:微電子科學(xué)與工程;陳明健(2000— ),男,漢族,江蘇無(wú)錫人,本科在讀,研究方向:通信工程。
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年11期)2019-07-04 00:34:48
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年9期)2017-04-17 03:00:53
電子制作(2017年19期)2017-02-02 07:08:27
電子制作(2016年21期)2016-05-17 03:52:51
電子設(shè)計(jì)工程(2015年15期)2015-02-27 12:07:30
電子設(shè)計(jì)工程(2015年8期)2015-02-27 12:05:36