基于多分布式電源的微電網控制策略研究
2020-12-27 13:47:36范東海
通信電源技術 2020年16期
范東海
(國電南瑞南京控制系統有限公司,江蘇 南京 211106)
0 引 言
近年來,我國在新能源技術方面的研究取得了很大的成果,這為分布式發電系統的發展以及分布式發電系統與電力系統的協同運行奠定了基礎。微電網是由分布式電源、能量存儲裝置、負載以及控制裝置組成的微型電力系統。由分布式電源作為主要的能量來源,能運行在并網模式和離網模式下。此外,還能夠提高當地的供電穩定性和能源的利用率[1]。
1 微電網的概念
分布式發電系統與其附近的用電負荷按照一定的連接形式組合起來構成了微電網。微電網的構成主要包括了分布式電源、交流母線、DC/DC變換器、DC/AC變換器以及用電負荷等[2],其組成形式如圖1所示。此外,微電網的運行方式主要包括與電力系統配合運行的并網和獨立運行的離網兩種。
2 微電網模型的實現
由于微電源是分布式發電系統和微電網的能量來源,因此有必要研究分析火力發電、風力發電以及光伏發電3種微電源,從而驗證每種微電源的運行可靠性。

圖1 微電網組成形式
2.1 火力發電系統的建模與控制

圖2 火力發電系統基本組成
火力發電系統的基本組成包括微汽輪機、永磁同步電機、整理單元、逆變單元以及濾波單元等,如圖2所示。其工作原理是由燃料驅動微汽輪機工作,帶動永磁同步電機發電,再經過整流單元和逆變單元將頻率變為50 Hz。火力發電系統的控制模型如圖3所示。當火力發電系統處于并網運行狀態時,采用PQ控制策略,能夠較容易地控制有功功率和無功功率。處于離網運行狀態時,不受電力系統的協調控制,可以通過采用下垂特性曲線控制方法,從而取得較好的控制效果[3]。
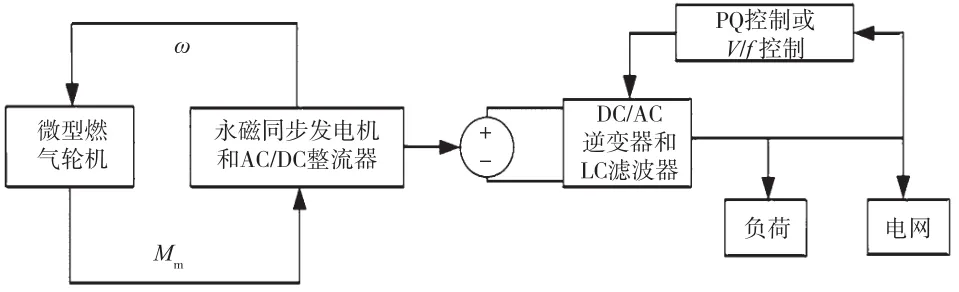
圖3 火力發電系統總體控制模型
2.2 風力發電系統的建模與控制
風力發電系統的基本組成包括風機、永磁同步電機、整理單元、逆變單元以及濾波單元等,如圖4所示。
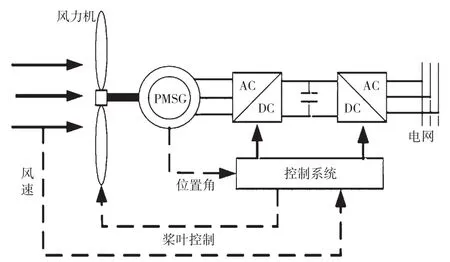
圖4 風力發電系統基本組成
其工作原理是由風驅動風機工作帶動永磁同步電機發電。由于風速具有隨機性,導致電能參數也具有隨機性,因此同步發電機發出的電能需經過整流單元和逆變單元的變換才可以進行并網或使用[4-5]。風力發電系統的控制包括電機側變流器控制和電網側變流器控制兩個方面。其中,電機側變流器的控制目標是保證電機側變流器的高效運行,實現最大風能的跟蹤,即控制Q軸電流。控制電流的公式為:

最大風能跟蹤控制策略的控制框圖如圖5所示。
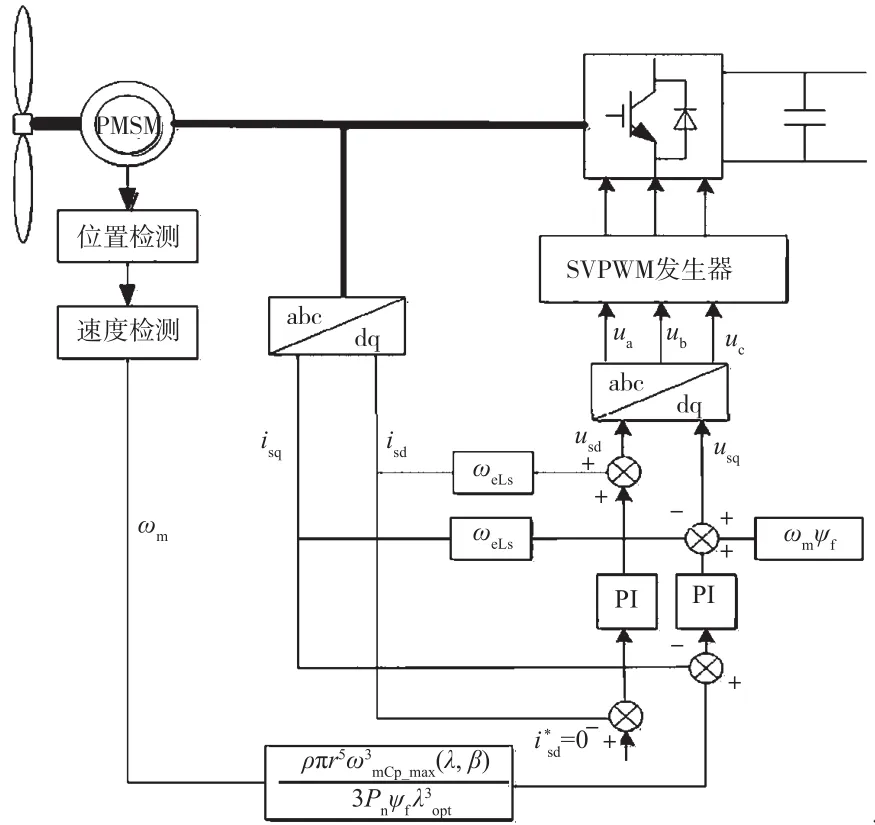
圖5 最大風能跟蹤控制策略
電網側變流器采用基于比例諧振方法的控制策略,能夠有效跟蹤50 Hz交流信號。實際應用中采用的是準PR控制器,其傳遞函數為:

電網側變流器控制策略能夠穩態控制誤差信號,且易于實現。其控制框圖如圖6所示。

圖6 電網側變流器控制策略
2.3 光伏發電系統的建模與控制
光伏發電系統的基本組成包括光伏陣列、DC/DC變換器、DC/AC變換器、濾波單元以及MPPT控制單元等,如圖7所示。
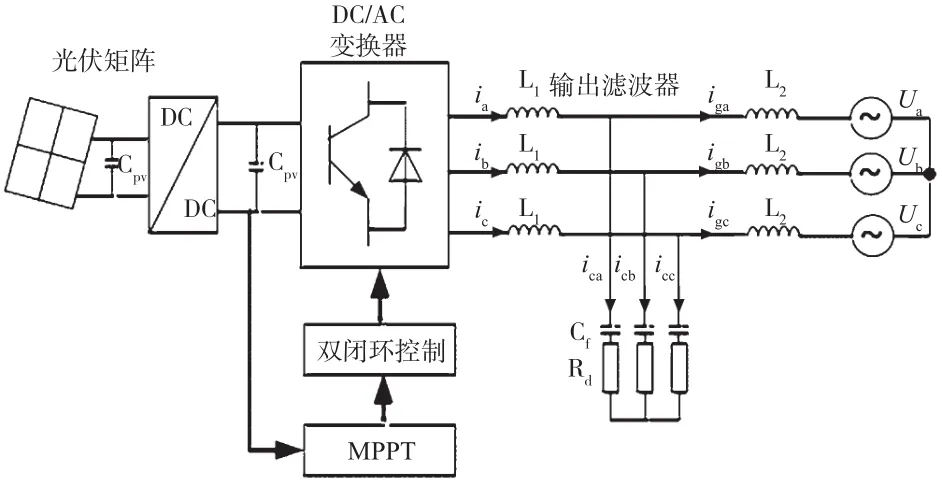
圖7 光伏發電系統基本組成
光伏發電系統中,需要通過DC/DC變換器提升光伏陣列的輸出電壓,通過DC/AC變換器將直流電變換為50 Hz的工頻交流電進行并網或供給負荷使用。MPPT控制單元用于實時監測光伏陣列的輸出電壓,當檢測到電壓和電流達到最大值時,以最大功率向蓄電池充電,從而保證光伏陣列、蓄電池以及負荷均處于最佳工作狀態[5]。
光伏發電系統雖然可以通過無功補償設備來維持電壓的穩定性,但是會增加硬件投資成本,因此有必要通過軟件控制電壓的穩定性,確保光伏陣列工作在最大功率點[6-7],其控制策略如圖8所示。
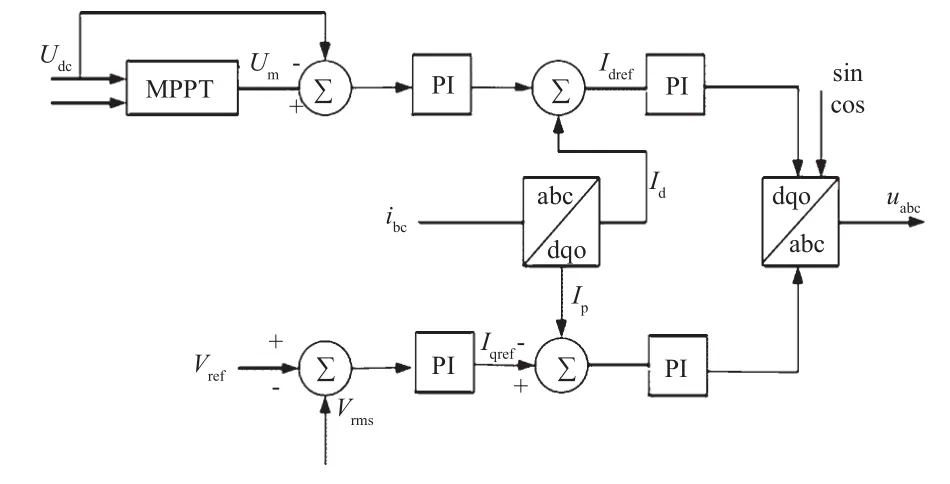
圖8 MPPT電壓控制策略
系統的外環是電壓控制環,內環是電流控制環。經過坐標變換后,并網電流可以分解為有功和無功兩個正交分量。針對有功分量,比較MPPT控制單元輸出的電壓Um與實際直流電壓Udc并求和,再經過PI控制器得到電流Idref,作為內環有功電流控制的給定量。針對無功分量,比較交流電壓Vref與實際電壓Vrms并求和,再經過PI控制器得到電流Iqref,作為內環無功電流控制的給定量。經過PI控制器比較將并網電流有功分量Id與給定量Idref并求和,最后經過坐標反變換得到調制波uabc。由此實現了并網能量由直流到交流的變換過程,并且實現了對于最大功率的跟蹤。
3 微電網的控制策略研究
3.1 微電網的運行狀態
微電網的運行方式主要包括并網運行和離網運行兩種,另外還存在一種切換運行。微電網通常工作在并網運行狀態下,較少時間工作在離網運行狀態[8]。并網運行方式下,微電網與電力系統進行能量交換。當微電網的負荷過大時,除微電網自身發出的電能提供給負荷外,還需要電力系統提供剩余所需電能。當微電網自身發出的電能還有盈余時,盈余的電能會輸送到電力系統供給其他負荷使用[9]。微電網的電壓和頻率都是由電力系統進行協調控制,采用功率控制方式運行。當電力系統出現故障,電能質量不符合標準時,微電網會從并網運行轉換為離網運行,微電源會跟蹤負荷的變化情況,提供所需要的功率。
3.2 微電網的控制策略
微電網的組成比較復雜,包括火力發電系統、風力發電系統以及光伏發電系統,而且各系統的特性存在巨大差異[10]。例如,風力發電和光伏發電具有很強的隨機性和波動性,不易獲得恒定的功率,在其接入電力系統進行并網運行時,需要以可靠的控制策略為保證,這種情況下的微電源稱為間歇性微電源。而火力發電輸出的電能參數可以進行有效控制,不僅能控制恒定功率,還能夠控制電壓和頻率,這種情況下的微電源稱為可控微電源。
當微電網工作在離網模式,獨立運行時,可控微電源作為主電源,采用V/f控制策略,用于給微電網提供所需的電壓和頻率。當微電網的負荷出現變化,導致當前的發電能力與負荷需求無法進行有效匹配時,該策略能夠及時調節輸出,跟蹤負荷的需求,保證微電網的穩定運行。其他微電源都是從電源,采用PQ控制策略,高效率利用能源。具體的控制策略如圖9所示。

圖9 微電網主從控制策略
火力發電系統作為該微電網的主控電源。當微電網處于并網運行狀態時,采用PQ控制策略,由電力系統進行協調控制提供微電網運行所需的電壓和頻率;當微電網處于離網運行狀態時,采用V/f控制策略。由于火力發電系統輸出功率穩定,能夠快捷實現調節,因此在系統負荷不發生劇烈變化的情況下,能夠保證微電網長時間運行在離網模式下。微電網中的風力發電系統和光伏發電系統無論并網運行狀態還是離網運行狀態,都采用PQ控制策略。風力發電系統基于比例諧振算法跟蹤最大風能,光伏發電系統基于MPPT策略跟蹤最大功率。
4 仿真測試
4.1 微電網仿真模型
為了有效驗證微電網的動態性能,搭建了由火力發電系統、風力發電系統以及光伏發電系統構成的微電網仿真模型,并采用主從控制策略進行控制。
設置電網電壓的有效值為380 V,頻率為50 Hz,光伏發電系統的內阻為0.05 Ω,濾波電感值L設置為10 mF。在光伏發電系統中,仿真初始t=0 s時刻的光強為600 W/m2,t=1 s時刻增加為1 000 W/m2。在風力發電系統中,仿真初始t=0 s時刻的風速為8 m/s,t=3 s時刻速增加為10 m/s。在火力發電系統,仿真初始t=0 s時刻的發電功率為8 kW,t=2 s時刻增加為15 kW。
4.2 仿真結果分析
微電網并網運行時,微電源輸出功率的仿真結果如圖10所示,微電源有功功率和無功功率變化情況的仿真結果如圖11所示,微電輸出電壓和諧波分析如圖12所示。

圖10 微電源輸出功率
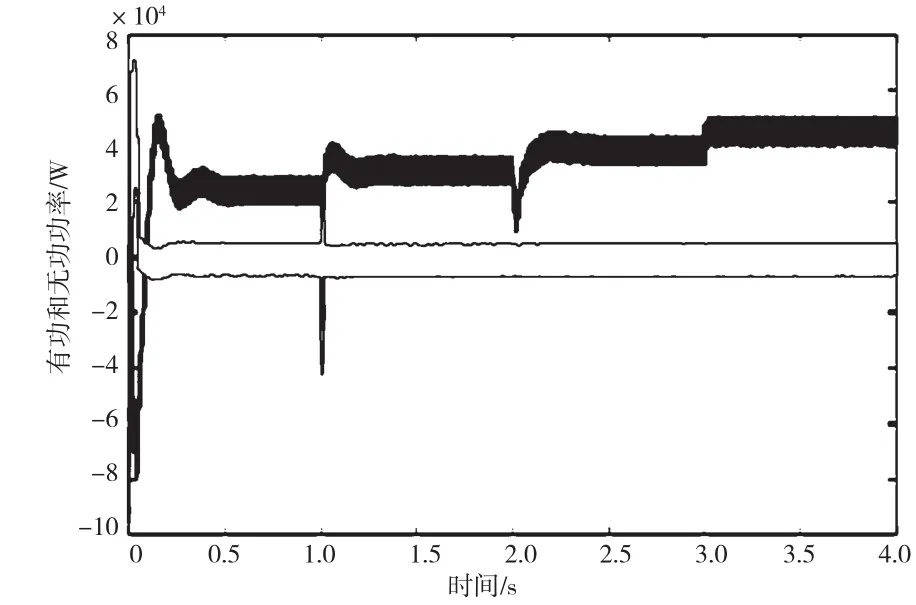
圖11 微電源有功功率和無功功率變化情況
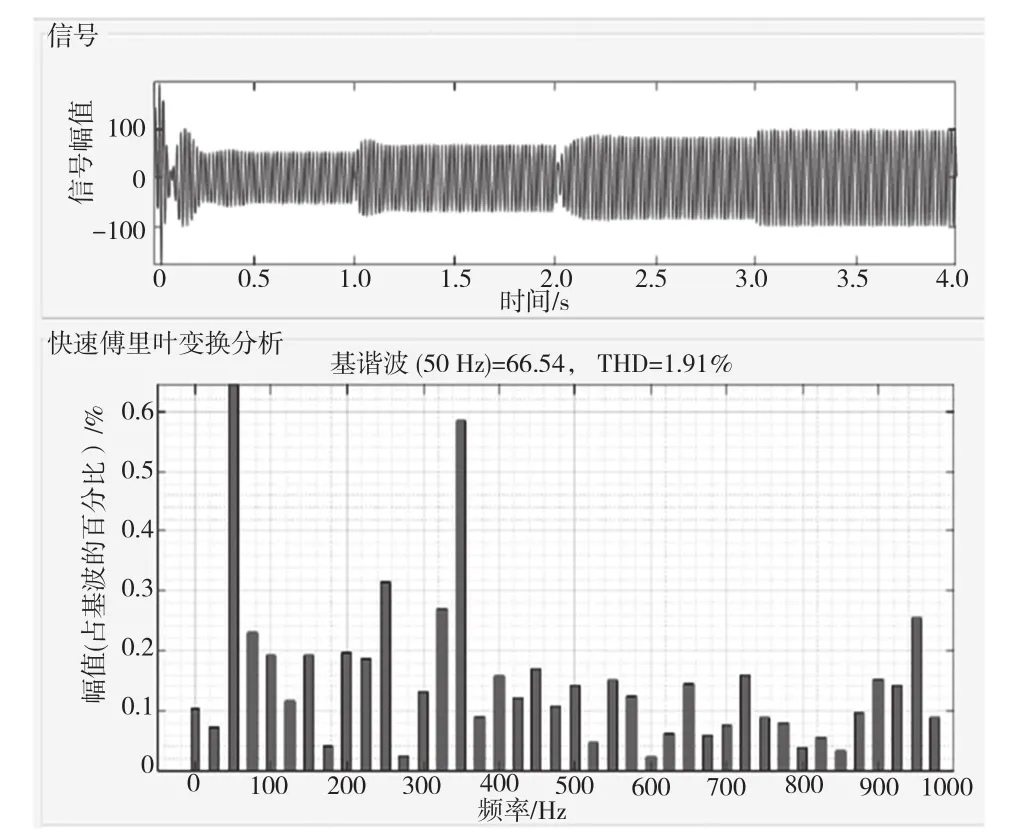
圖12 微電輸出電壓及諧波分析
當系統的風力、光強以及火力發電功率等參數發生變化時,微電網的控制系統能夠快速響應外界變化,逐步提升有功功率,而無功功率一直維持為零。經過FFT分析輸出電壓,得到電壓諧波含量為1.91%,完全滿足并網技術的參數要求。
5 結 論
本文專門研究了包含多種微電源的微電網控制策略,具體包括多種微電源的工作原理和控制策略。以各種微電源的特性和控制策略為依據,總結出了微電網的主從控制策略。火力發電系統在并網時采用PQ控制策略,離網時采用V/f控制策略,而其他微電源一直采用PQ控制策略。此外,搭建了微電網仿真模型,進行了并網模式下微電網的仿真研究。研究可知,微電網的主從控制策略具有較好的動態特性,能保證微電網的穩定運行。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
能源工程(2020年6期)2021-01-26 00:55:22
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
山東冶金(2019年3期)2019-07-10 00:54:04
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
消費導刊(2018年10期)2018-08-20 02:57:02
家庭影院技術(2017年9期)2017-09-26 03:41:45
通信電源技術(2016年1期)2016-04-16 04:57:26
