水車式增氧機驅動下方形圓切角養殖池集污水動力試驗
2020-12-25 07:21:16桂福坤張學芬曲曉玉張清靖馮德軍
農業工程學報 2020年20期
關鍵詞:研究
桂福坤,張學芬,曲曉玉,張清靖,方 帥,馮德軍
水車式增氧機驅動下方形圓切角養殖池集污水動力試驗
桂福坤1,張學芬1,曲曉玉2,張清靖3,方 帥1,馮德軍1※
(1. 浙江海洋大學國家海洋設施養殖工程技術研究中心,舟山 316022;2. 浙江海洋大學水產學院,舟山 316022;3. 北京市水產科學研究所,漁業生物技術北京市重點實驗室,北京 100068)
為探究水車式增氧機驅動下方形圓切角養殖池內污物匯集規律與流場分布特性,該研究通過物理模型試驗研究了水車式增氧機在不同布設角度(為葉輪軸線與養殖池中線組成的銳角)、布設距離比(為葉輪軸線中點與最近池壁之間的距離,為池壁邊長)以及驅動流速對方形圓切角養殖池內污物匯集與流場特性的影響。試驗通過相機采集池底污物分布圖像、聲學多普勒流速儀測量養殖池內流場分布,利用MATLAB軟件處理分析污物圖像以及流速數據。結果表明:在池內形成有效水平環流是污物向池心匯集的首要條件,但水車式增氧機布設角度、布設距離比和驅動流速都影響池內有效環流的形成;在水車式增氧機靠近池壁布設工況下,其與池壁的夾角設置為70°時,集污效果最優;在水車式增氧機遠離池壁布設工況下,其與池壁的夾角設置為45°時,集污效果最優,隨著布設距離比的增加,中心集污效果增強,但是圓切角周邊出現集污死角;水車式增氧機驅動流速影響養殖池內污物匯集,而且只有在水車式增氧機布設距離比和布設角度都合適的工況下,增加驅動流速,才能增強污物匯集效果。研究結果可為方形圓切角養殖池內水車式增氧機的布設方式提供參考與依據。
水產養殖;水質;水動力學;物理模型;水車式增氧機;布設方式;集污效果
0 引 言
隨著生活水平的提高,傳統養殖模式下的水產品產量和質量已經無法滿足人們的需求,養殖模式亟待向高效集約化方向轉變[1-2]。工廠化養殖模式由于具有養殖密度大,養殖周期短,集約化程度高等優點,是中國水產養殖未來重要的發展方向[3-5]。如何快速有效地除去養殖池內的污物(殘餌、糞便等)是工廠化養殖中水處理技術的核心問題[6-8]。水車式增氧機是工廠化水產養殖池中常見的機械,尤其在大尺寸養殖池內,通過葉輪旋轉產生小氣泡給水體增氧,通過設置科學的布置方式還可以在池內形成特定的水流使污物順利匯集到集污口,然后通過定時拔管等方式排出[9-11]。水車式增氧機布置方式多種多樣,大多僅憑養殖者的主觀經驗,缺乏科學的指導。因此,如何利用增氧設備在為水體增氧的同時還能增強養殖池的集污能力是亟待解決的問題。
杜漢斌等[12]早在1989年就已經開始研究圓形魚池進水設施與流速排污的問題,研究表明排污的關鍵是使池底各點的流速都大于污物的起動流速。Zhang等[13]研究了表層式水車增氧機驅動模式下對蝦養殖池內的流速分布情況,結果顯示蝦池轉角處會形成渦旋,池壁附近在一定條件下會產生環流,阻礙整體環流的強度。于林平等[14]通過流體力學仿真技術研究了單進水管結構對單通道圓弧角養殖池水動力特性的影響,研究表明增加射流孔數有利于增加養殖池內的平均流速,使養殖池內的速度分布更加均勻。趙樂等[15]通過物理模型試驗研究了方形圓切角養殖池在管式射流驅動模式下的集污水動力特性,研究表明射流角度為40°時,池內污物匯集效果最優。Benoit等[16]針對射流裝置進行研究,研究表明射流管的布設角度與類型是影響養殖池內流場分布的重要參數。Gorle等[17-18]利用CFD模擬了射流管布設角度對雙排水形式的八邊形養殖池池內水動力特性的影響。綜上所述,已有的研究大多針對射流管的設置方式,關于水車式增氧機布設方式對養殖池內殘餌糞便等污物運動匯集的影響研究較少,難以為水車式增氧機布設方式提供科學全面的指導。
該研究以典型的工廠化養殖池方形圓切角養殖池為研究對象,通過物理模型試驗的方法,探索水車式增氧機與池壁的夾角、與池壁的距離以及驅動流速等布設參數對池內污物匯集特性以及流場分布的影響規律,以期為方形圓切角養殖池內水車式增氧機的布設方式提供參考與依據。
1 材料與方法
1.1 試驗裝置
試驗設置如圖1所示,養殖池模型為方形圓切角養殖池(圖1a),池壁長=220 cm,內壁高=70 cm,池底中心設有圓形排水口半徑=5 cm,池底中心排水口凹陷向四周延伸,坡度比=1∶15。該試驗按照模型水車與實物水車1∶10的幾何尺寸制作水車式增氧機模型,模型主要由可調速的電機、葉輪和傳送帶組成(圖1c),通過調節電壓控制電機轉速,從而改變水車式增氧機的驅動流速。試驗中以水車式增氧機前方5 cm且水面下5 cm處流速代表水車式增氧機驅動流速。如圖1a所示,水車式增氧機的布設角度為葉輪軸線與養殖池中線(圖中虛線)組成的銳角,布設距離為葉輪軸線中點與最近的池壁之間的距離。實際養殖池內水體往往包含藻類和殘餌糞便的分解物等懸浮物質,但其密度和尺寸遠小于沉積在底部的固體顆粒物,對池底污物的運動影響較小。考慮到本文主要研究池底污物的運動情況,因此試驗中使用自來水,不考慮實際養殖池中懸浮物濃度的影響。試驗中心水深20 cm。根據物理模型試驗中模型相似準則,在水車模型縮放比為1∶10時,污物模擬物也應該縮小10倍,但實際中難以獲得相應尺寸和密度的污物替代物,考慮到污物尺寸對試驗結果影響較小并且參照已有的研究[15,19],直接利用直徑1.6 mm,長度2.0~3.0 mm的沉性對蝦飼料替代養殖池內的殘餌等固體顆粒污物,使用設置在水池正上方的輕便型數碼相機(Nikon P7100)拍攝池內污物的分布情況,使用Nortek“小威龍”聲學多普勒流速儀測量養殖池內的近底層流速。
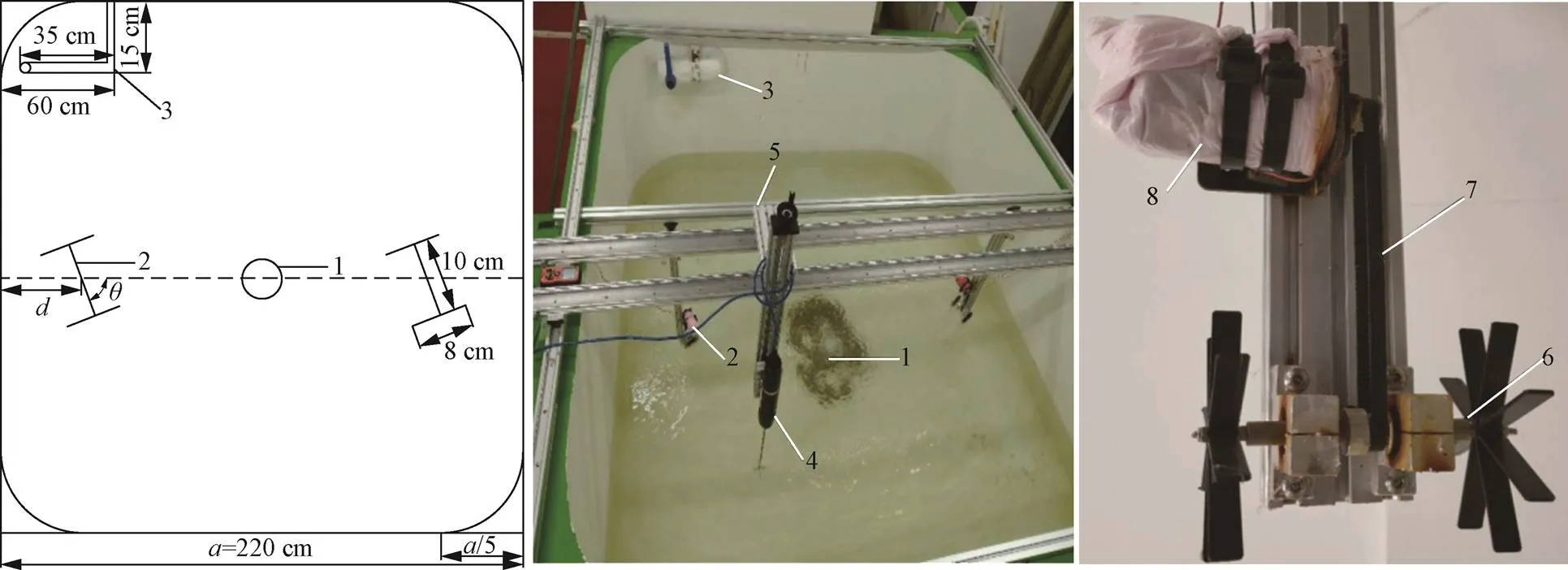

a. 養殖池示意圖 a. The schematic diagram of model aquaculture tankb. 養殖池 b. Photo of aquaculture tankc. 水車式增氧機模型 c. Paddle-wheel aerator model
1.排水口 2.水車式增氧機 3.進水口 4.ADV流速儀 5.ADV流速儀支架 6.葉輪 7.傳送帶 8.電機
1.Outlet 2.Paddle-wheel aerator 3.Inlet 4.Acoustic doppler velocimetry 5.Support frame for ADV 6.Impellers 7.Belt 8.Electric motor
注:表示養殖池邊長,表示葉輪軸線中點與最近的池壁之間的距離,表示葉輪軸線與養殖池中線(圖中虛線)組成的銳角。
Note:represents the length of the tank,represents the distance between the central point of the impellers and the nearest tank wall,represents the acute angle between the impellers and the center line of the tank (dotted line in the figure).
圖1 試驗裝置圖
Fig.1 Experimental setup
1.2 試驗設計
1.2.1 試驗方案
該研究主要通過物理模型試驗的方法研究水車式增氧機布設角度、布設距離比、驅動流速對方形圓切角養殖池內污物匯集特性的影響,并分析其水動力學機制。研究主要分為污物匯集特性試驗和相應的流場分布特性試驗2部分。
第1部分為污物匯集試驗:1)研究布設角度對池內污物分布特性的影響。固定布設距離比為1/22,驅動流速為28 cm/s,分別將布設角度依次調整為0°,10°,20°,30°,40°,45°,50°,60°,70°,80°,90°,采集養殖池內污物匯集情況;2)為研究布設距離比對池內污物分布特性的影響,在上一步研究基礎上選取試驗效果較好的布設角度:0°,45°,70°,固定驅動流速為28 cm/s,分別將布設距離比依次調整為1/22,3/22,5/22,7/22,采集養殖池內污物匯集情況;3)為研究驅動流速對池內污物分布特性的影響,選取試驗效果較差的布設角度20°和試驗效果較好的布設角度45°,固定布設距離比為1/22,分別將驅動流速依次調整為20和28 cm/ s,采集養殖池內污物匯集情況。
第2部分為流場分布特性試驗:1)為研究布設角度對養殖池流場分布特性的影響,固定水車的驅動流速為28 cm/s,布設距離比為1/22,測量布設角度分別為20°和45°時,測量養殖池內流場分布狀況;2)為研究布設距離比對于池內流場分布特性的影響,分別測量水車式增氧機布設角度為45°和70°時,測量布設距離比為1/22和5/22時,測量養殖池內流場分布狀況。
1.2.2 污物圖像采集
試驗中首先調試水車式增氧機布設角度和布設距離,并將一定質量的餌料撒于養殖池內,確保養殖池內飼料分布均勻;然后開啟固定在養殖池正上方的相機再啟動水車式增氧機;待污物匯集穩定后關閉水車式增氧機并移至池外;最后待水體穩定靜止后關閉相機,處理視頻資料。
1.2.3 近底流場測量
試驗中使用聲學多普勒流速儀[20-21]測量養殖池內的流場分布情況,該流速儀可以測得其探頭下方5 cm處水體微團的流速。待池內水體流動穩定后(即池底污物停止運動),按照圖2黑色實心點所示的布點方案測量流場,共計79個測量點。左下角處因設有進水口,無法設置測量點,故測量點比其余3個圓弧角處的少。為了獲得養殖池的近底流速,流速儀探頭與養殖池邊壁處的底部距離設置為5 cm,采集頻率50 Hz,每個測量點持續采集時長為1 min,采集3 000組流速數據。
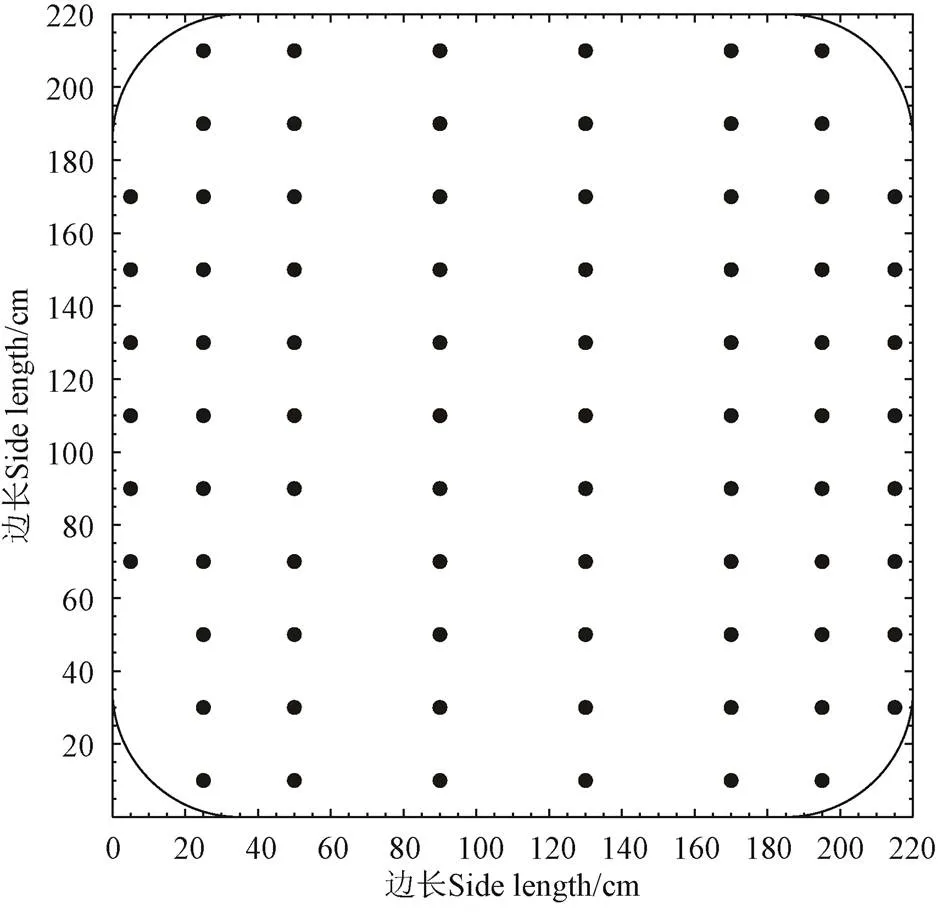
注:圖中黑色實心點表示流速測量點。
1.3 數據處理
1.3.1 圖像處理
該研究利用MATLAB軟件處理相機采集到的污物分布圖像[22-24]:1)利用rgb2gray函數將原始圖像轉化成灰度圖[25]。2)將灰度化的圖像進行二值化處理,通過設定閾值將污物與池底面分離。該研究中將灰度索引值閾值設置為125,即像素點的灰度索引值大于125時,將像素點的顏色設為白色,像素點的灰度索引值小于125時,將像素點的顏色設為黑色,進而確定污物的位置[26];3)根據每個污物點的坐標計算出其到養殖池中心(排污口)的距離,找出所有污物距離中的最大值。
每種工況下,污物的最大距離越大,則表明污物距離池中心越遠,排污時越不容易排出。因此,通過比較不同工況下污物分布距離最大值,便可以確定集污效果的優劣。
1.3.2 流速數據處理
利用MATLAB軟件處理流速數據,首先對所測得的數據進行濾波處理,剔除異常值,求出平均值作為該點流速值。利用griddata函數對養殖池近底離散的流速數據插值,獲得整個養殖池池底流速的分布情況。考慮到外插數據準確度低,故刪除外插流速數據。最后利用imagesc和quiver函數分別繪制流場云圖和流速箭頭圖,詳細顯示不同工況下池內近底流場分布特性。
2 結果與分析
2.1 布設角度對污物匯集的影響
圖3給出布設距離比為1/22時,不同布設角度下污物分布原圖(圖中黑色部分為污物)。首先根據原始圖像定性評估污物匯集效果,然后針對難以定性評估的工況,采用如上描述的圖像處理方法進行定量分析。根據圖3可以明顯地發現10°(養殖池邊緣有污物殘留)、20°、30°、80°和90°的集污效果較差,所以不再對其進行定量分析。0°、40°、45°、50°、60°和70°工況下的污物距離(最大距離)定量分析結果如圖4所示。綜合圖3和圖4可以發現,各工況下的污物分布最大距離隨著布設角度的增大從0°至30°區間內逐漸增大,從40°至60°區間內逐漸減小然后增大,70°至90°區間,逐漸增大,在70°時污物匯集效果最好。
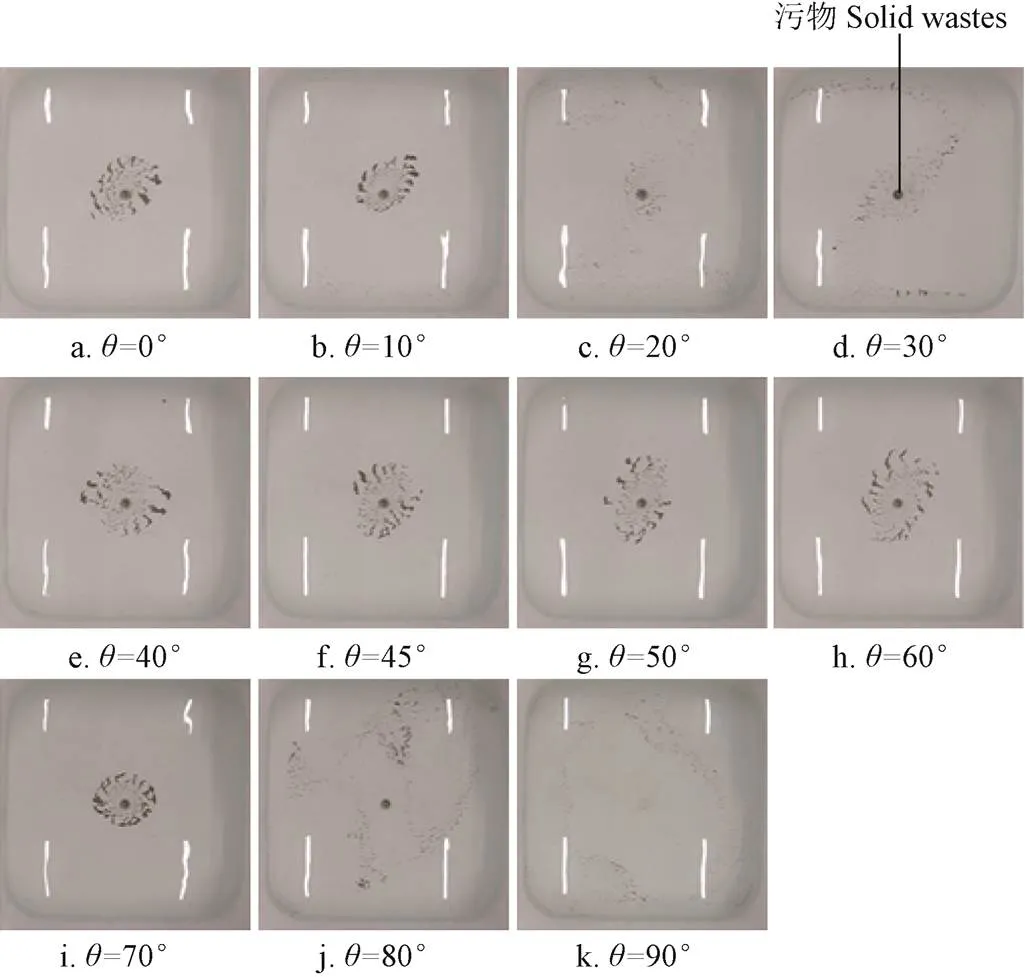
圖3 不同布設角度(θ)下的污物分布原圖
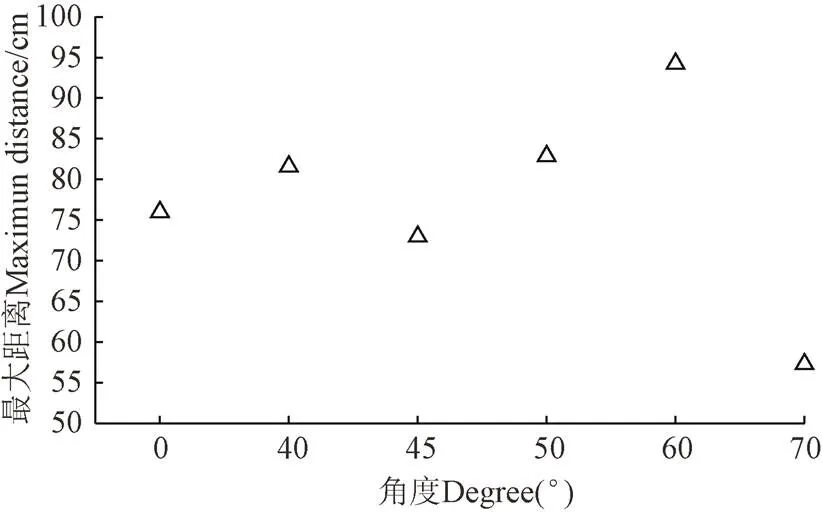
圖4 不同布設角度(θ)下污物距池心的最大距離
2.2 布設距離比對污物匯集的影響
由布設角度對污物匯集的影響研究(圖3和圖4)可以發現0°、45°和70°時污物匯集效果較好。因此,僅分析這3個布設角度工況下,布設距離比對污物匯集的影響。圖5給出了不同布設距離比下的污物分布原圖。通過圖像可以清晰地發現0°和70°工況下,隨著布設距離比的增加,污物的匯集效果逐漸變差。然而,在45°工況下,隨著布設距離比的增加,污物的整體匯集效果在逐漸增強,但是在池壁圓弧角處逐漸出現集污死角區域。因此,綜合考慮水車式增氧機布設時的實際作業難度等,建議在實際養殖過程中,將水車式增氧機布設角度設為45°,布設距離比保持在5/22(約1/4)池壁邊長范圍左右,從而確保獲得優異的污物匯集效果。

圖5 不同布設距離比(d/a)下的污物分布原圖
2.3 驅動流速對污物匯集的影響
根據2.1和2.2節的研究結果,選取集污效果較差布設角度20°和集污效果較好的布設角度45°工況,研究驅動流速對集污性能的影響。圖6給出了不同驅動流速下的污物分布原圖。通過圖像可以明顯地發現:1)在布設角度20°工況下,增加驅動速度集污效果有些許提升,但最終整體效果依然較差;2)在布設角度為45°工況下,隨著驅動流速的增加,污物匯集效果明顯提升。綜合分析來看,只有在布設角度和布設距離比都合適的條件下,增加驅動流速才具有實際的意義,污物匯集效果隨著驅動流速的增加而逐漸變好。如果布設角度和布設距離比不合適,池內依然無法形成有效環流,則對增強污物匯集效果作用有限,這與于林平等[14-15]針對射流管驅動下的養殖池集污水動力特性研究結論相吻合。杜漢斌等[12]的研究結果表明,養殖池內各點的流速應必須大于污物的起動流速,如果某處的流速小于污物的起動流速,污物就會沉積,如果排污口附近流速較小,即使養殖池邊緣速流速大,污物也不能匯集到排污口處。
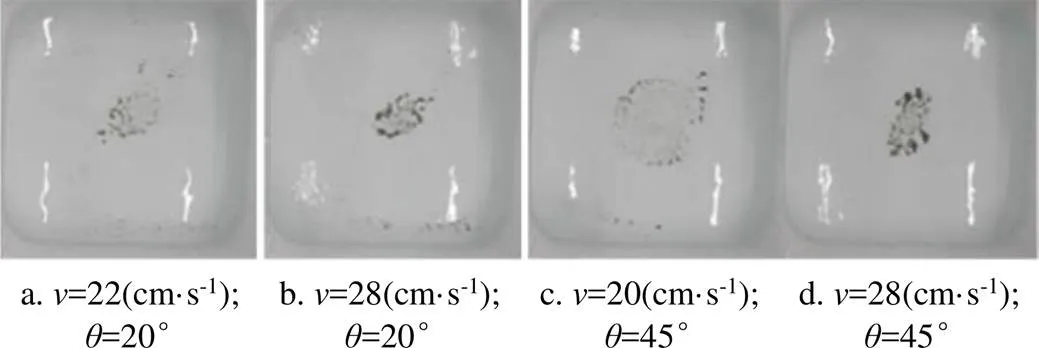
圖6 不同驅動流速(v)下的污物分布原圖
2.4 養殖池內流場分布特性
養殖池內污物的運動與池內的流場分布密不可分,水流是污物運動的驅動力[27]。流場分布特性可以揭示污物運動的內在機理。圖7顯示了不同布設角度、布設距離比下養殖池內近底流場的分布特性。通過圖7a~7b可以發現當布設距離比為1/22時,高流區均分布在貼近池壁處,水流在碰撞到池壁處,產生較為強烈的反射,因此產生速度峰。由于池壁附近的黏性力較大,將消耗掉一部分能量,因此動能越來越小,一部分轉化為黏性損失,一部分轉化為壓能。當產生的動能無法滿足這兩項需求時,水流速度將會下降。當布設角度為20°時,由于轉角處流動的環流曲率較大,在轉角處形成渦旋。水流很快到達轉角附近的池壁處,在池壁處產生的黏性損失較大,因此水流速度不斷降低,最終無法形成環流。當布設角度為45°時,水流與池壁相交位置距轉角處較遠,為接近池長1/2處,因此在池壁處產生的黏性損失較小,并且轉角處沒有渦流產生,減少了養殖池的局部阻力,在動能損耗較小的條件下,養殖池內形成環流,具備了帶動污物匯集的必要條件。
圖7b~7c流場表明當布設角度為45°,布設距離比為1/22時(即靠近池壁處),池中心的低流區面積較大,當布設距離比為5/22(約1/4)時,池中心的低流區面積較小,即養殖池內水體流速變化總趨勢是以水車式增氧機為中心向池壁和池心兩側逐漸減小。當水車距池壁較遠時,水體在向池壁方向擴散的過程中動能逐漸降低,因此池壁處的流速較小。對比圖5可以發現,水車的布設角度為45°時,中心污物匯集面積隨著布設距離比的增大而變小,圓切角邊緣處逐漸出現少許集污死角,這是因為中心附近低流速區面積在減小,高流速區面積在增加,而圓切角邊緣處低流速區在增加。當水車式增氧機布設角度調整為70°,布設距離比為1/22時(即靠近池壁處),圖7d可以看出池內流場分布均勻,并且可以形成有效的環流。然而由圖5可知,在70°工況下污物匯集效果隨著布設距離比增大而變差。對照布設距離比為3/22時的流場進行測量的結果(圖7e)可以看出,池內無法形成有利于污物匯集的高流區,流態較為紊亂,污物無法匯集。目前,在關于養殖池內水力驅動設備布置方式的研究中,并沒有人關注過70°條件下流場特性,通過試驗可以看出布設角度為70°時,只有水車位于靠近池壁位置,才可以呈現出較好的集污效果。因此在該區域形成污物匯集區。綜合上述研究結果,可以發現在池內形成有效的環流是污物向池心匯集的首要條件,但是如果環流流速過小,則即使形成環流,池內的污物也不能很好地匯集到池心附近。

注:綠色箭頭代表增氧機布設位置和角度。
3 討 論
養殖池內的集污效果直接關系到池內水質的優劣,是養殖過程中必須重點關注的問題。水車式增氧機是大尺寸養殖池內常見的增氧設施,具有增氧和集污的雙重功能。本文物理模型試驗的結果表明,當水車式增氧機布設角度設置為45°時可以在池內形成良好的環流,獲得良好的集污效果,這與郭平巧[28]的數值模擬研究結果一致。郭平巧通過數值模擬的方法系統地研究了水車式增氧機數量、擺放位置、擺放角度對正方形養殖池內流場分布的影響。其論文中的“數值模擬流場結果圖4-33”與本文中的測量流場結果圖7c中的分布特性高度一致,均表明當布設角度為45°時,養殖池內可以形成有效環流,但是養殖池壁和中心附近均存在低流速區。該區域內的污物往往沉積在池底很難去除,而且溶解氧也比較低。因此,布設位置和布設角度是水車式增氧機設置中需要重點考慮的兩個因素。射流管是養殖池內常見的另一種集污設施,與水車式增氧機工作原理相同,都是通過帶動水流運動從而達到污物匯集的目的。在方形圓切角養殖池內,趙樂等[15]的物理模型試驗結果表明,隨射流管布設角度的增加(0~70°),射流管布設角度為40°時,可以獲得最優的集污效果;任效忠等[29]的物理模型試驗結果表明,隨射流管布設角度的增加(0~90°),池內水體平均流速呈先升高后降低趨勢,在布設角度為50°時池內水體平均流速最高。上述研究中的最優布設角度均在45°附近,小角度的差異極有可能源自于試驗條件的不同。薛博茹等[30]通過數值模擬研究了射流管驅動下,射流管布設角度為0°時,射流管布設距離比對池內流場分布的影響,研究結果表明布設距離比明顯地影響池內流場分布,設置在0.04附近有利于方形圓切角養殖池系統獲得最佳的流場條件。本文研究結果表明,在布設角度為0°工況下,水車式增氧機布設距離比設置為1/22時,可以獲得良好的集污效果。該研究結果與本文中布設距離比對污物匯集的影響結果一致。綜上所述,水車式增氧機布設角度為45°附近可以獲得良好的流場效果和集污效果。
在實際養殖池內開展池底污物現場測量是檢驗集污效果的最直接有效的方法,但是實際大尺寸養殖池內水體往往比較渾濁,難以直接觀察到養殖池底部的污物分布情況。Du等[19]在研究曝氣管布設方式對矩形養殖池內污物匯集影響時,通過排盡實際養殖池中的水觀察沉積在底部的污物匯集情況。但是在排水的過程中,污物在水流推力的作用下會發生位移,導致污物分布位置發生變化。Davidson等[31]通過在實際養殖池邊緣上方向圓形養殖池內釋放單個飼料顆粒研究射流管布設角度對池內污物運動的影響。該方法具有簡單易操作的優點,但是單顆飼料不能同時完全模擬池內不同位置污物的運動以及污物間的相互影響。目前,尚未見有關大尺寸養殖池底部污物分布現場測量的相關報道。針對本文物理模型試驗研究結果,嘗試在某對蝦養殖企業開展了現場測試試驗。考慮到在水車式增氧機作用下養殖池內上下水流運動規律基本相同這一特點,試驗中通過觀察養殖池表層泡沫的運動匯集情況評估養殖池內底部污物運動匯集情況,從而達到定性驗證物理模型試驗結果的目的(見圖8)。從圖8中可以明顯地看到池內表層水流特點以及池壁邊緣處的低流速區。現場試驗結果與物理模型試驗結果基本一致。由于難以對現場測量結果進行定量分析,因此不再對現場測量結果進行深入分析。

圖8 水車式增氧機作用下方形圓切角養殖池集污情況現場觀測
4 結 論
本研究探討了方形圓切角養殖池中,水車式增氧機在不同布設角度、布設距離比和驅動流速工況下,養殖池底部污物匯集特性和相應的流場分布特性。研究結果表明,良好的環流是獲得較好集污效果的重要前提,在布設角度和布設距離比都合適的條件下提高水車式增氧機的驅動流速有助于提高集污效率;當水車式增氧機靠近池壁布設時,在布設角度為70°時達到最優的集污效果;在布設角度為45°工況下,污物匯集效果隨著布設距離比的增大而增強,但是圓切角池壁處逐漸出現集污死角。考慮水車式增氧機布設時的實際作業情況等,建議在實際養殖過程中,水車式增氧機按照45°布設,并按照本試驗的結果調節增氧機與池壁的相對距離(約1/4池長處),在保證污物起動的前提下,可以適當增加增氧機轉速,以提高集污效果。研究結果不僅可以為養殖者在布置水車式增氧機時提供科學參考,也可以為后續研究提供對比和驗證數據。
由于模型試驗研究工況的局限性,接下來將通過開展數值模擬,增加試驗工況,進一步系統詳細地研究水車式增氧機布設方式對養殖池內污物匯集特性的影響。針對大尺寸養殖池底部污物難以直接觀察這一難題,應開發具有自動補光功能的水下攝像機,達到全范圍精準監測池底污物運動的目的,從而更科學地指導水車式增氧機的布設,并豐富水產養殖裝備工程技術知識體系。
[1] 吳偉,范立民. 水產養殖環境的污染及其控制對策[J]. 中國農業科技導報,2014,16(2):26-34. Wu Wei, Fan Limin. Pollution and control measures of aquaculture environment[J]. Journal of Agricultural Science and Technology, 2014, 16(2): 26-34. (in Chinese with English abstract)
[2] 張曉雙,傅玲琳,呂振明,等. 國內外循環式工廠化水產養殖模式研究進展[J]. 飼料工業,2017,38(6):61-64. Zhang Xiaoshuang, Fu Linglin, Lü Zhenming, et al, Research development review of recirculating aquaculture mode in China and abroad[J]. Feed Industry, 2017, 38(6): 61-64. (in Chinese with English abstract)
[3] 張正,王清印,王印庚,等. 弧形篩及生物凈化池凈化陸基工廠化海水養殖廢水的效果[J]. 農業工程學報,2011,27(增刊2):176-181. Zhang Zheng, Wang Qingyin, Wang Yingeng, et al. Effluent purification effect of system in sieve bend combined with four grade biological cleansing ponds in industrialized mariculture[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2011, 27(Supp. 2): 176-181. (in Chinese with English abstract)
[4] 袁凱,莊保陸,倪琦,等. 室內工廠化水產養殖自動投飼系統設計與試驗[J]. 農業工程學報,2013,29(3):169-176. Yuan Kai, Zhuang Baolu, Ni Qi, et al. Design and experiments of automatic feeding system for indoor industrialization aquaculture[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2013, 29(3): 169-176. (in Chinese with English abstract)
[5] 李建平,吳康,何相逸,等. 基于CFD的養殖水體固液旋流分離裝置數值模擬與驗證[J]. 農業工程學報,2019,35(11):182-187. Li Jianpin, Wu Kang, He Xiangyi, et al. Numerical simulation and validation of solid-liquid cyclone separation device for aquaculture water based on CFD[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(11): 182-187. (in Chinese with English abstract)
[6] Pfeiffer T J, Osborn A, Davis M. Particle sieve analysis for determining solids removal efficiency of water treatment components in a recirculating aquaculture system[J]. Aquacultural Engineering, 2008, 39(1): 24-29.
[7] 張成林,楊菁,張宇雷,等. 去除養殖水體懸浮顆粒的多向流重力沉淀裝置設計及性能[J]. 農業工程學報,2015,31(增刊 1):53-60. Zhang Chenglin, Yang Jing, Zhang Yulei, et al. Design and performance of multiway gravity device on removing suspended solids in aquaculture water[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(Supp. 1): 53-60. (in Chinese with English abstract)
[8] 張俊新,劉長發,何潔,等. 工廠化養殖循環水固液分離特性及處理工藝選擇分析[J]. 農業環境科學學報,2008,27(3):1173-1176. Zhang Junxin, Liu Changfa, He Jie, et al. Analysis of the solid-liquid separation characteristics and treating process choice of industrial recycled aquaculture wastewater[J]. Journal of Agro-Environment Science, 2008, 27(3): 1173-1176. (in Chinese with English abstract)
[9] 王興國,王悅蕾,趙水標. 養殖水體增氧技術及方法探討[J]. 浙江海洋學院學報(自然科學版),2004,23(2):114-117,125. Wang Xingguo, Wang Yuelei, Zhao Shuibiao. Study on a method of increasing oxygen for aquacu1turewaters[J]. Journa1 of Zhejiang Ocean University( Natural science), 2004, 23(2): 114-117, 125. (in Chinese with English abstract)
[10] 谷堅,顧海濤,門濤,等. 幾種機械增氧方式在池塘養殖中的增氧性能比較[J]. 農業工程學報,2011,27(1):148-152. Gu Jian, Gu Haitao, Men Tao, et al. Performance comparison for different mechanical aeration methods in pond[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2011, 27(1): 148-152. (in Chinese with English abstract)
[11] 谷堅,徐皓,丁建樂,等. 池塘微孔曝氣和葉輪式增氧機的增氧性能比較[J]. 農業工程學報,2013,29(22):212-217. Gu Jian, Xu Hao, Ding Jianle, et al. Comparison of oxygen-enriched performances of micropore and impeller aerators in pond[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2013, 29(22): 212-217. (in Chinese with English abstract)
[12] 杜漢斌,易高社,王明義. 圓形魚池進水設施與流速排污問題的初步探討[J]. 水利漁業,1989(3):39-45.
[13] Zhang J, Kitazawa D. Measurement of water current field created by paddle wheel aerators in shrimp culture pond[C] // Shanghai: IEEE (Institute of Electrical and Electronics Engineers) Oceansi, 2016, 1-4.
[14] 于林平,薛博茹,任效忠,等. 單進水管結構對單通道矩形圓弧角養殖池水動力特性的影響研究[J]. 大連海洋大學學報,2020,35(1):134-140. Yu Linpin, Xue Boru, Ren Xiaozhong, et al. Influence of single inlet pipe structure on hydrodynamic characteristics in single: Drain rectangular aquaculture tank with arc angles[J]. Journal of Dalian Ocean University, 2020, 35(1): 134-140. (in Chinese with English abstract)
[15] 趙樂,張清靖,許靜,等. 工廠化對蝦養殖池管式射流集污水力特性[J]. 中國水產科學,2017,24(1):190-198. Zhao Le, Zhang Qingjing, Xu Jing, et al. Experimental study on the hydraulic characteristics of waste concentrated in an industrial aquaculture pond equipped with a pipe jet flow system[J]. Journal of Fishery Sciences of China, 2017, 24(1): 190-198. (in Chinese with English abstract)
[16] Benoit D. Hydrodynamic Characteristics of Muti-drain Circular Tanks[D]. Canada: The University of New Brunswick, 2007.
[17] Gorle J M R., Terjesen B F, Summerfelt S T, et al. Hydrodynamics of octagonal culture tanks with Cornell-type dual-drain system[J]. Computers and Electronics in Agriculture, 2018, 151: 354-364.
[18] Gorle J M R, Terjesen B F, Summerfelt S T, et al. Hydrodynamics of atlantic salmon culture tank: Effect of inlet nozzle angle on the velocity field[J]. Computers and Electronics in Agriculture, 2019, 158: 79-91.
[19] Du Y, Chen F, Zhou L, et al. Effects of different layouts of fine-pore aeration tubes on sewage collection and aeration in rectangular water tanks[J]. Aquacultural Engineering, 89(2020): 102060.
[20] 張亞磊,張法星,張敬威,等. 基于ADV的推流式曝氣池流場特性研究[J]. 四川大學學報(工程科學版),2014,46(2):29-35. Zhang Yalei, Zhang Faxing, Zhang Jingwei, et al. Study of flow field characteristics in plug-flow aeration tank based on ADV[J]. Journal of Sichuan University(Engineering Science Edition), 2014, 46(2): 29-35. (in Chinese with English abstract)
[21] Chanson H, Trevethan M, Aoki S, et al. Acoustic doppler velocimetry(ADV) in small estuary: Field experience and signal post-processing[J]. Flow Measurement and Instrumentation, 2008, 19(5): 307-313.
[22] 趙松柏,諶海云,陳普春,等. 基于MATLAB的不規則面積圖像測量[J]. 自動化技術與應用,2012,31(9):14-16. Zhao Songbai, Shen Haiyun, Chen Puchun, et al. The irregular image area measurement based on MATLAB[J]. Techniques of Automation and Applications, 2012, 31(9): 14-16. (in Chinese with English abstract)
[23] 張慧,吳常文,江丹丹,等. 基于圖像處理技術的養殖池集污特性研究[J]. 海洋與湖沼,2016,47(2):374-379. Zhang Hui, Wu Changwen, Jiang Dandan, et al. Monitoring waste cumulatingin aquaculture pondsusing image processing technlogy[J]. Oceanologia ET Limnologia Sinica, 2016, 47(2): 374-379. (in Chinese with English abstract)
[24] 劉星橋,孫玉坤,趙德安,等. 采用圖像處理技術對魚體健康狀況監視和預報[J]. 農業工程學報,2005,21(6):118-121. Liu Xingqiao, Sun Yukun, Zhao Dean, et al. Monitoring and predicting the health conditionof fish using image processing technology[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2005, 21(6): 118-121. (in Chinese with English abstract)
[25] 游達章,張建鋼,甘勇. 位圖圖像灰度化的方法及編程實現[J]. 廣西工學院學報,2004,15(1):23-26. You Dazhang, Zhang Jiangang, Gan Yong. A way of graying the image of a bitmap and the realization of programming[J]. Journal of Guangxi University of Science and Technology, 2004, 15(1): 23-26. (in Chinese with English abstract)
[26] 吳冰,秦志遠. 自動確定圖像二值化最佳閾值的新方法[J]. 測繪學院學報,2001,18(4):283-286. Wu Bing, Qin Zhiyuan. New approaches for the automatic selection of the optimal threshold in image binarization[J]. Journal of Institute of Surveying and Mapping, 2001, 18(4): 283-286. (in Chinese with English abstract)
[27] 劉威. 矩形流水對蝦養殖池集污特性及對蝦耐流性研究[D]. 舟山:浙江海洋大學,2018. Liu Wei. Study on Fouling Characteristics and Prawn Tolerance in Shrimp Pond[D]. Zhoushan: Zhejiang Ocean University, 2018. (in Chinese with English abstract)
[28] 郭平巧. 養殖池水車配置數值模擬研究[D]. 臺灣:國立成功大學,2009. Guo Pingqiao. Numberical Simulation of Paddlewheel Setup in Culture Ponds[D]. Taiwan: National Cheng Kung University, 2009. (in Chinese with English abstract)
[29] 任效忠,王江竹,張倩,等. 方形圓弧角養殖池進水結構對流場影響的試驗研究[J]. 大連海洋大學學報,2020,35(5):726-732. Ren Xiaozhong, Wang Jiangzhu, Zhang Qian, et al. Influence of inlet structure on flow field in a rectangular arc angle tank in aquaculture[J]. Journal of Dalian Fisheries University, 2020, 35(5): 726-723. (in Chinese with English abstract)
[30] 薛博茹,于林平,張倩,等. 進徑比對矩形圓弧角養殖池水動力特性影響的數值研究[J/OL]. 水產學報,2020-10-19[2020-10-27]. http: //kns. cnki. net/kcms/detail/31. 1283. s. 20201019. 1029. 002. html. Xue Boru, Yu Linping, Zhang Qian, et al. A numerical study of relative inflow distance on the influence of hydrodynamic characteristics in the single-drain rectangular aquaculture tank with arc angles[J/OL]. Journal of Fisheries of China, 2020-10-19[2020-10-27]. http: //kns. cnki. net/kcms/detail/31. 1283. s. 20201019. 1029. 002. html. (in Chinese with English abstract)
[31] Davidson J, Summerfelt S. Solids flushing, mixing, and water velocity profiles within large (10 and 150) circular 'Cornell-type' dual-drain tanks[J]. Aquat Eng, 2004, 32(1): 245-271.
Hydraulic characteristics of waste convergence under paddle-wheel aerators for square aquaculture pond with round angle
Gui Fukun1, Zhang Xuefen1, Qu Xiaoyu2, Zhang Qingjing3, Fang Shuai1, Feng Dejun1※
(1.,,316022,; 2.,,316022,; 3.,,100068,)
Intensive and semi-intensive aquaculture have attracted more and more attention in recent years in China, where various types of fish are raised at a high density, particularly relying mainly on agricultural equipment and supplementary feeds. A considerable revolution has emerged increasingly from the traditional aquaculture methods, in order to meet the growing demands for the seafood both in quantity and quality, thereby to compensate for the significantly reduced capture from over exploited fisheries. Consequently, it is also urgent to deal with the solid wastes primarily derived from the uneaten feed and fecal droppings of cultured fish in the tank, especially that in the tank of high density. Moreover, solid wastes have been classified as the most dangerous waste in fish culture systems, for that they can clog the fish gills, thereby leading to the death of fish. Therefore, it is highly recommended to effectively remove the solid wastes in the tank as quickly as possible, because the reduction of residence time in a tank can be used to prevent the wastes of decomposition, further to lessen the stress to the cultured fish. In an excellent oxygen transfer system, a paddle-wheel aerator is commonly used as aquaculture equipment. The paddle-wheel aerator can generate flow circulation via adjusting the deployment, to converge solid wastes at the vicinity of the outlet end, and subsequently the solid wastes can be discharged from the tank. However, there is no sound theoretical guidance on adjusting the deployment, depending often on the experience of farmers in aquaculture practice. This case can result in various deployment patterns for the ineffective convergence and removal of solid wastes. In this study, a laboratory experiment was conducted in a model square tank with four round cut corners, in order to investigate the effects of deployment angel(represents the acute angle between the impellers and the center line of the tank), deploymentdistance ratio(is the distance between the center point of the impellers and the nearest pool wall,is the length of the pool), and the driving velocity of paddle-wheel aerator, on the efficiency of convergence and removal for solid wastes. A simplicity artificial feed was selected to simulate the solid waste in the experiment. A CCD camera was used to record the wastes distribution in the tank, while, the captured images were obtained concurrently. A quantitative analysis was conducted using the processed images from the MATLAB software. An indicator was set as the maximum distance of the waste to the outlet in a tank. An appropriate deployment pattern of paddle-wheel aerator can be determined by comparing the maximum distribution distance under various working conditions. The flow velocity was also measured to figure out the flow characteristics under an Acoustic Doppler Velocimetry. The results show thatthe generation of circulation in a horizontal panel in the tank was the primary requirement for converging solid wastes to the center of the tank, and it can significantly be affected by the deployment angle, deploymentdistance ratio, and driving velocity.When the deploymentdistance ratiowas small, the removal efficiency of solid wastes gradually decreased with the increase of the angle in the range of 0°-30°, and then gradually increased in the range of 40°-60°, finally decreased in the range of 70°-90°, peaking at the angle of 70°.When the deploymentdistance ratiowas in some range, the removal efficiency of solid wastes gradually decreased with the increase of deployment distance at the deployment angle of 0°and 70°. It gradually increased for the deployment angle of 45°with some undesired convergency of solid wastes in the round cut corners. There were the optimal deployment angle and distance ratioin the paddle-wheel aerators, where the removal efficiency of solid wastes can gradually increase as the driving velocity increased. The findings can provide a sound reference for the deployment of paddle-wheel aerator in the intensive and semi-intensive aquaculture pond.
aquaculture; water quality; hydrodynamics; physical models; paddle-wheel aerator; deployment type; solid wastes convergence and removal
桂福坤,張學芬,曲曉玉,等. 水車式增氧機驅動下方形圓切角養殖池集污水動力試驗[J]. 農業工程學報,2020,36(20):275-282.doi:10.11975/j.issn.1002-6819.2020.20.033 http://www.tcsae.org
Gui Fukun, Zhang Xuefen, Qu Xiaoyu, et al. Hydraulic characteristics of waste convergence under paddle-wheel aerators for square aquaculture pond with round angle[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2020, 36(20): 275-282. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2020.20.033 http://www.tcsae.org
2020-04-18
2020-10-02
浙江省屬高校科研院所基本科研業務費(2019J00030);國家自然科學基金(31902425);舟山市科技項目(2018C21011、2020C21003)
桂福坤,博士,教授,主要從事設施養殖工程研究。Email:gui2237@163.com
馮德軍,博士,講師,主要從事工廠化水產養殖工程研究。Email:fengdj@zjou.edu.cn
10.11975/j.issn.1002-6819.2020.20.033
S969.3
A
1002-6819(2020)-20-0275-08
猜你喜歡
體育科技文獻通報(2022年3期)2022-05-23 13:46:54
天津外國語大學學報(2021年3期)2021-08-13 08:32:18
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
科技傳播(2019年22期)2020-01-14 03:06:54
遼金歷史與考古(2019年0期)2020-01-06 07:45:20
民用飛機設計與研究(2019年4期)2019-05-21 07:21:24
電子制作(2018年11期)2018-08-04 03:26:04
汽車工程學報(2017年2期)2017-07-05 08:13:02
國際商務財會(2017年8期)2017-06-21 06:14:14
電子制作(2017年23期)2017-02-02 07:17:19