基于語音交互功能的智能分類垃圾箱
2020-12-25 11:29:34伍玲玲鄒行宇張宇涵侍中樓
中國新技術新產品 2020年19期
劉 鵬 伍玲玲 鄒行宇 張宇涵 侍中樓 徐 偉
(1.江漢大學智能制造學院,湖北 武漢 430056;2.江漢大學工程訓練中心,湖北 武漢 430056)
0 引言
智能垃圾箱是一種以物聯網技術為基礎,利用自動控制技術,采用微電腦控制芯片、新型傳感探測裝置和機械傳動裝置等設備,對傳統垃圾箱進行改造發展而來的新型智能家居生活用品[1]。為了適應垃圾分類工作的需求,各種智能垃圾箱進入市場。與傳統垃圾箱相比,智能垃圾箱解決了垃圾分類的需求,為生產生活帶來了許多便利。但自身也存在著諸多問題,例如,操作不方便、垃圾分類不準確、垃圾打包不衛生、傳感器靈敏度不高以及人機交互功能不強等弊端。該文針對這些問題設計了一款基于語音交互功能的智能分類垃圾桶,以ESP8266物聯網模塊為核心,實現了物聯網組網功能,垃圾箱配有多級齒輪箱、熱熔切斷裝置和簡易氣壓回路裝置,可以自動完成垃圾分類、打包套袋。此外該設計還配有語音識別播報系統,不僅實現了人機交互、垃圾智能分類,而且具有很強的市場應用和推廣前景。
1 垃圾箱系統設計
該項目基于語音識別交互功能,控制部分硬件系統以Arduino Mega2560為設備終端CPU,LD3320和語音播報模塊構成語音識別交互系統,實現智能分類,電磁換向閥和氣泵構成簡易氣壓回路,實現套袋功能和打包功能。通過ESP8266、顯示屏和OneNET云平臺實現人工智能。系統可以通過2種方式實現控制。1)由OneNET云平臺連接設備終端節點和應用端,用戶通過手機App或在PC端上發送命令,以此來控制相關模塊。2)用戶直接控制操作垃圾箱。
1.1 硬件設計
垃圾箱主體為鋁型材框架結構,長80 cm,寬40 cm,高80 cm,適用于可回收垃圾和其他垃圾。如圖1所示,該系統結構分為上、中、下3層,上層安裝上箱蓋、蓋子、多級減速箱、顯示屏、按鍵。中層安裝剪切機構、垃圾袋收納盒、氣管。下層安裝箱體、垃圾支撐盒、兩位三通電磁換向閥、氣泵、電池、單片機,并配有中控語音識別播報系統、顯示屏控制系統、簡易氣壓回路系統。其中多級減速箱采用不完全齒輪,實現蓋子的打開與關閉。垃圾袋收納盒集中放置已折疊垃圾袋,剪切機構采用環鏈式傳動機構和加熱絲實現垃圾袋切割打包,垃圾支撐盒通過定滑輪實現垃圾袋的翻轉。圖1為系統總架構圖。
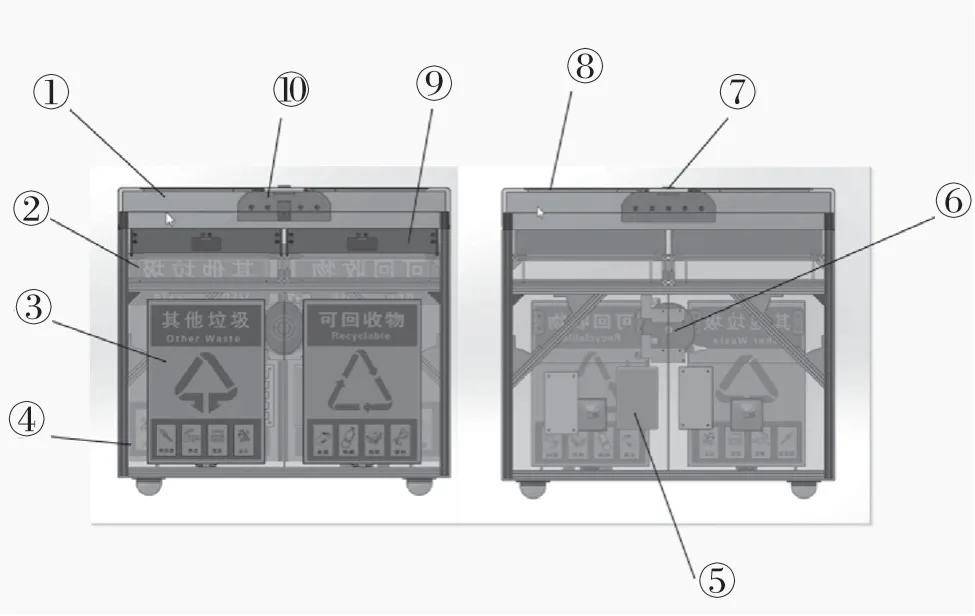
圖 1系統總架構實物圖
1.1.1 執行機構
垃圾箱具有自動打包套袋功能。自動套袋的執行機構采用二位三通換向閥切換回路產生氣壓差實現運動過程,其傳動機構就是一整套氣壓回路裝置,動力源是氣泵。自動打包的執行機構是切斷桿,其傳動機構是環式的鏈傳動和齒輪傳動,動力源是電機。
1.1.2 自動套袋
自動套袋功能通過氣壓回路傳動裝置、垃圾袋收納盒電動抽氣泵結合二位三通換向閥和限位開關實現,利用垃圾本身的重力實現垃圾袋套袋功能,通過抽氣機構利用負壓的原理使垃圾袋自動套袋,然后通過接近開關檢查垃圾袋位置狀態,保證垃圾袋準確到達設計位置。
左邊套袋:當左端入口LI(left_in,ri(right_in))與左端出口LO(left_out,ro(right_out))相連通時,啟動抽氣機,抽走左垃圾箱下方內的空氣并從上方吹入垃圾袋,實現垃圾桶的自動套袋。
右邊套袋:CPU給右邊回路以模擬輸出,模擬開關打開,指示燈亮起,感應線圈Y得電,二位三通電磁換向閥進入工作狀態,T轉換到P形成右邊回路,抽氣機工作,抽出右垃圾桶下方的空氣并從上方吹入垃圾袋,實現垃圾桶的自動套袋。如圖2抽氣系統運作示意圖和表1氣壓傳動真值表所示。

表1 氣壓傳動真值表
1.1.3 自動打包
剪切熔斷裝置的功能是將打包好的垃圾袋封口,等待自動打包動作結束后,垃圾箱側向開口,方便用戶提取垃圾。
當垃圾裝滿后,通過電機驅動環鏈帶帶動第一切斷桿(如圖3(b)所示)和第二切斷桿(如圖3(c)所示)相對運動,最后被第一切斷桿中間鑲嵌的熔斷器熔斷,形成新的封口端,裝滿垃圾的部分同時被封口,可以直接取出,具備很好的實用性[2]。
垃圾袋送出功能,采用活頁翻轉鏈接實現。下活頁固定在大垃圾箱底部,上活頁固定在垃圾支撐盒底部。翻轉垃圾箱處于閉合工作狀態時,其底面與水平面平行。當需要取出垃圾袋時,內桶電機開始運行,收繩通過定滑輪拉動垃圾箱定向翻轉。以翻轉垃圾箱外把手一面為0°基準面,逆時針為正方向,繞活頁旋轉軸旋轉49°到達極限位置即限位開關處。
1.2 電子控制部分
該智能垃圾箱所有的硬件設備都在Arduino Mega2560開發板上進行集成和控制,通過ESP8266模塊實現了垃圾箱與計算機之間的通信功能。控制部分由CPU、I/O模塊以及通信模塊3個部分組成,通過Arduino IDE程序和中移物聯網(OneNET)客戶端的控制,完成各個模塊之間接口的數據傳遞和協同工作。該垃圾箱各模塊及其所用的硬件如圖4電子模塊鏈接示意圖和表2硬件參數所示。

表2 硬件參數
1.2.1 CPU
該項目采用Arduino Mega2560作為CPU,相較于Arduino UNO提供了更多的I/O口,它有54個數字輸入/輸出引腳(其中15個可用于PWM輸出)、16個模擬輸入引腳、4個UART接口、1個USB接口、1個DC接口、1個16 MHz的晶體振蕩器、1個復位按鈕。該設計產品需要40個數字輸入/輸出,10個模擬輸入/輸出,2個UART接口,采用12VDC供電,因此滿足該項目要求。
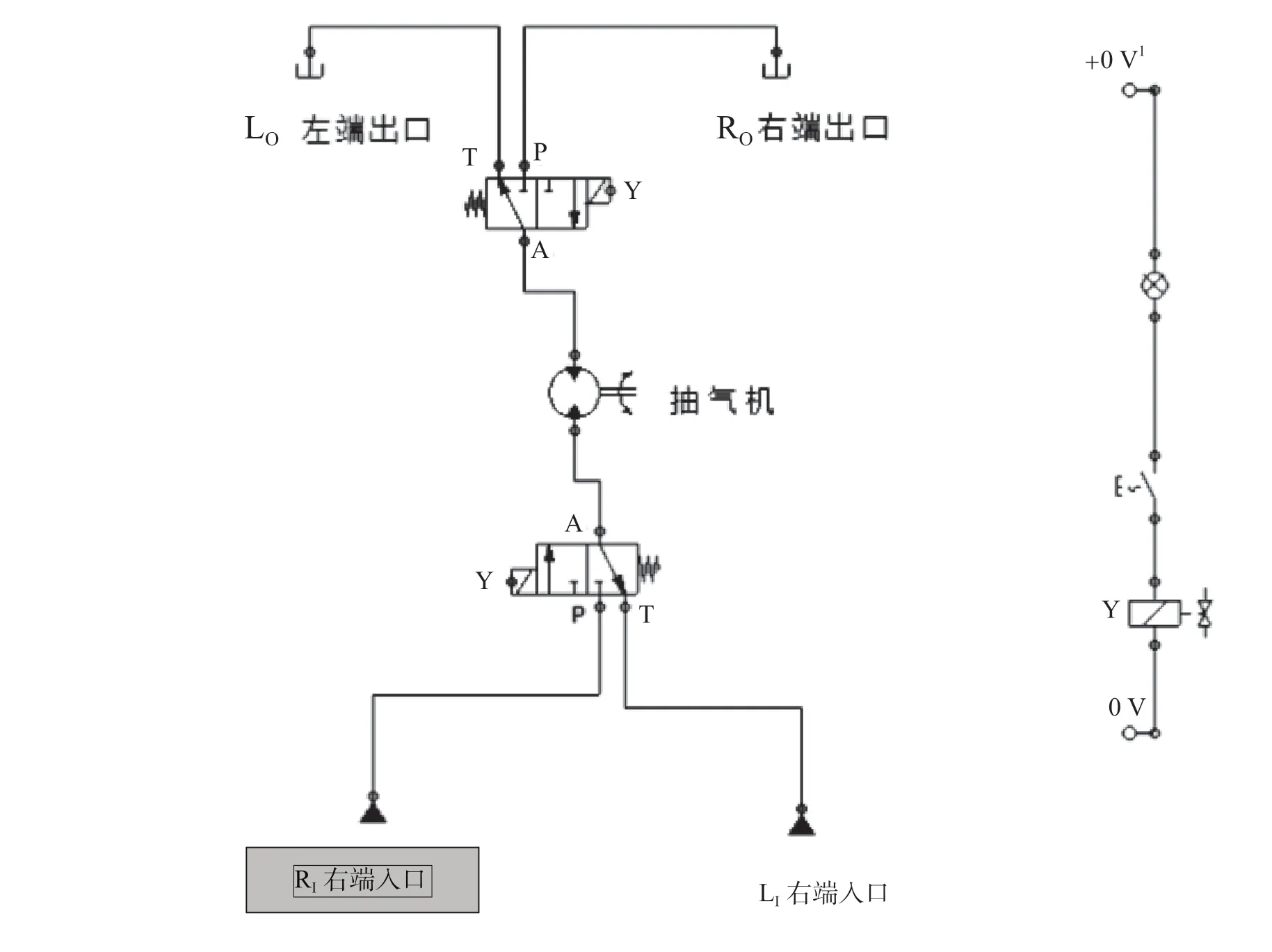
圖2 抽氣系統運作示意圖

圖3 切斷裝置運動流程圖
1.2.2 IO模塊
IO模塊分為4個部分。1)微動開關提供位置限定,分布在20~39數字輸入引腳,信號采用0、1數字量讀取和輸出。2)LD3320語音識別模塊進行語音識別,分布在2~7數字輸入引腳,信號采用組合串口輸入輸出。3)JQ8900模塊進行語音播報,分布在18、19數字輸出引腳,信號采用0、1數字量控制輸出。4)SG90舵機和TT馬達實現基本運動,分布在8~13數字輸出引腳,信號采用PWM(脈沖寬度調節)輸出,另外預留14個數字和6個模擬引腳作為擴展。
1.2.3 通信模塊
ESP8266芯片是一款串口轉無線模芯片,內部自帶固件,操作簡單,不需要編寫時序信號等[3]。ESP8266-Wi-Fi實現實時通信,分布在0、1的UART引腳,采用標準串口協議,ST7789彩屏提供界面交互,分布在0~4模擬輸入/輸出。
2 軟件設計
該項目初步設計了上下位機軟件,上位機為客戶端提供垃圾箱的基本狀態信息,下位機則實時監控垃圾箱的工作狀態以及相關用戶引導提示。
首先裝置上電后,對垃圾箱各模塊進行初始化自檢,如果不符合設定標準,將發出警報提示用戶進行修復。垃圾箱自檢正常后,完成ESP8266模塊初始化接入OneNET云平臺,垃圾箱開始進行上下位機運作,用戶開始垃圾分類并請示語音播報反饋,通過對話引導用戶進行垃圾分類。如果垃圾符合分類要求,將開啟分類動作和顯示屏實時動畫。此時同步采集電源電壓、垃圾袋儲存余量、垃圾袋使用情況,并實時反饋到OneNET形成人機互動。對于不滿足互動和分類要求的,將進行特殊處理,最后返回到ESP8266模塊初始化接入OneNET云平臺。進而完成一個響應周期,以此周而復始,實時響應遠程電器使能命令,圖5為垃圾箱程序設計流程圖。
2.1 總體控制框架
各模塊上電后,以Arduino Mega2560作為控制核心,通過RX、TX雙線串口與ESP8266模塊進行通信,通過MQTT協議與計算機進行通信,進而在客戶端顯示垃圾箱的基本特征。與此同時,相關數據實時顯示在ST7789型1.44寸顯示屏上,控制器直接對舵機、電機和繼電器電熱絲進行控制,并設計了對應的控制子程序。人機交互由LD3320語音識別模塊通過串口接入的麥克風進行語音識別,JQ8900-TF語音播報模塊通過4 W揚聲器進行語音播報,該部分是通過對應的數據接口與CPU通信,圖6為總體控制框架圖。
2.2 語音識別垃圾智能分類
垃圾箱通過紅外測距技術對是否有用戶接近進行感應測量,如果沒有人靠近,將會進入休眠狀態,觸發靠近中斷檢測程序。當用戶接近或超過垃圾箱距離臨界值時,語音識別、語音播報和機械控制功能待命,將進入人機交互劇本過程,該語音一共有兩級指令,第一級是“小米渣同學”,第二級是“我要扔什么垃圾”。指令分等級,只有觸發第一級指令才能進行第二級指令的觸發,并且觸發第一級指令后,有20 s的第二級指令機會時間,如果錯過20 s識別時間,將會進入初始狀態進行第一級指令判斷。根據語音提示區分2類垃圾,完成第二級指令觸發之后,對應垃圾箱上方的蓋子將會自動打開,檢測垃圾入箱之后,會在5 s后關閉蓋子,完成整個垃圾分類投放過程。接下來檢查垃圾袋里面的垃圾是否填充滿,如果填充滿,將會實現垃圾袋自動打包,接著自動安裝新的垃圾袋,自動進入靠近檢測。如果沒有填滿,也將自動進入靠近檢測。
2.3 垃圾箱上位機智能物聯(OneNET)
該項目使用ESP8266-Wi-Fi模塊,采用Wi-Fi形式實現遠程MQTT通信。Arduino從OneNET平臺請求數據和發送數據給OneNET平臺,都是發送特定的JSON格式數據。接收數據與發送數據的不同點在于,接收數據需要對OneNET平臺返回的數據進行解析,提取出需要的值。手機端只需要在局域網中連接對應垃圾箱的IP與端口號,就可以與該垃圾箱進行通信[4]。配合手機和電腦,用戶能通過客戶端直接獲取垃圾箱內部的各種實時監測信息,包括電源電壓、垃圾箱儲存余量以及垃圾袋使用情況等。
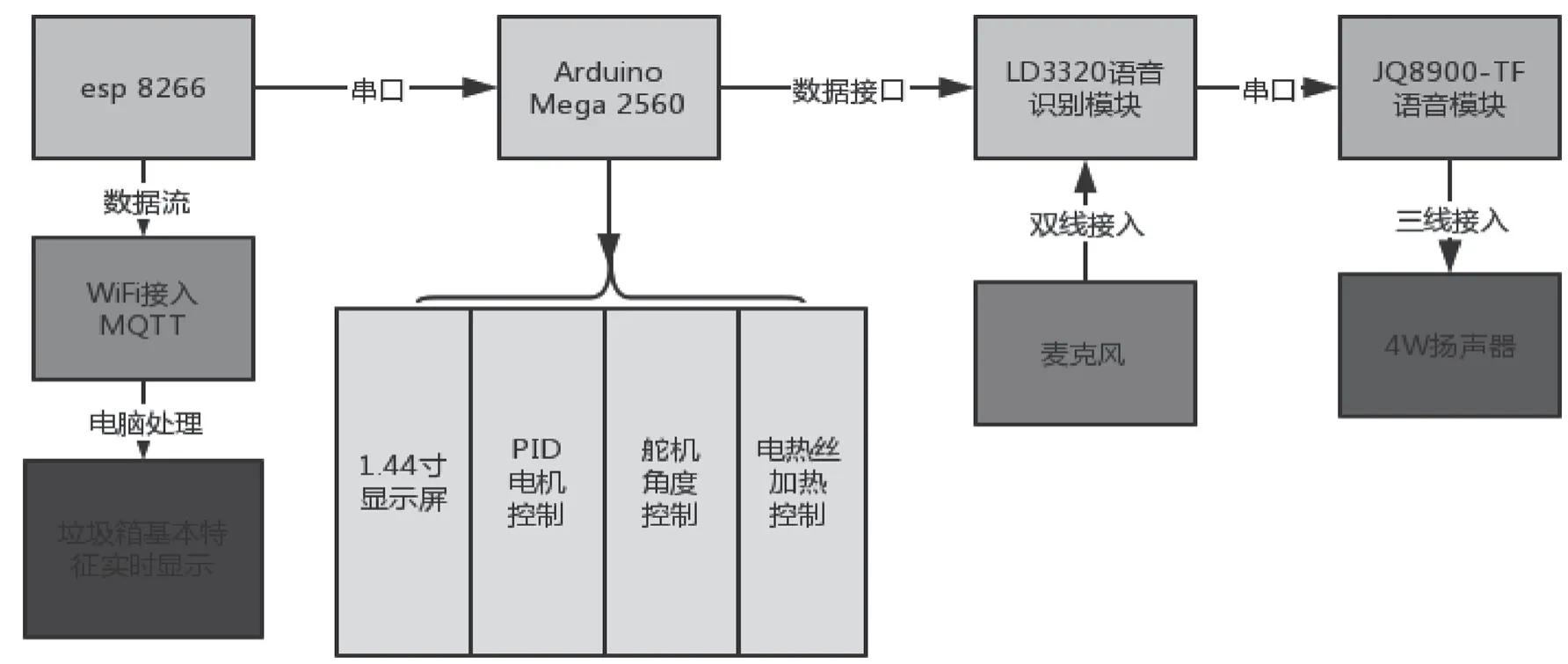
圖6 總體控制框架圖
3 結語
該文設計了一個基于語音交互功能的智能分類垃圾箱,基于語音交互功能實現垃圾的智能分類、自動套袋、打包以及封裝等功能。同時結合物聯網開發平臺(OneNET),實現了電腦和手機端對垃圾箱的遠程通信和控制功能。作為未來智能家居的一個有機組成部分,該產品的設計開發不僅可以為人類提供生活上的便利方便,而且具有極強的市場應用及推廣前景。在實際應用過程中,該設計作品仍存在語音識別易受環境噪聲干擾等問題,未來需要進一步改進。在將來的應用中,可以構建對智能分類垃圾桶的數據分析系統,對垃圾投放情況進行數據統計分析,為垃圾分類工作提供更加準確、智能化的服務。
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:25:56
中學生數理化·七年級數學人教版(2019年4期)2019-05-20 10:06:32
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
中學生數理化·七年級數學人教版(2018年6期)2018-06-26 08:36:06
初中生世界·七年級(2017年9期)2017-10-13 22:27:46
中國科技論壇(2017年7期)2017-07-25 08:49:53