資源一號(hào)02D衛(wèi)星星上管路設(shè)計(jì)方法
2020-12-25 07:13:30吳蓓蓓張宏宇郝剛剛周輝余快蔡亞寧王剛陳海峰張軍
航天器工程 2020年6期
吳蓓蓓 張宏宇 郝剛剛 周輝 余快 蔡亞寧 王剛 陳海峰 張軍
(1 中國(guó)空間技術(shù)研究院遙感衛(wèi)星總體部,北京 100094)(2 北京空間飛行器總體設(shè)計(jì)部,北京 100094)(3 北京華易卓成科技有限公司,北京 100011)
隨著數(shù)控彎管技術(shù)在衛(wèi)星管路制造中使用越來(lái)越廣泛,衛(wèi)星管路三維數(shù)字化模型開(kāi)始逐漸取代傳統(tǒng)圖紙來(lái)傳遞管路系統(tǒng)生產(chǎn)及焊裝信息。基于Pro/E的管道模塊可以實(shí)現(xiàn)基本管道布局和實(shí)體化設(shè)計(jì),但是由于管路系統(tǒng)設(shè)計(jì)工作的復(fù)雜性,管路系統(tǒng)設(shè)計(jì)整體效率低下。推進(jìn)系統(tǒng)管路設(shè)計(jì)影響到貯箱、推力器布局、星表布局等重要內(nèi)容,需要先期開(kāi)展并且迭代更改量巨大,而整個(gè)過(guò)程單組元推進(jìn)系統(tǒng)需要30天·人,雙組元推進(jìn)系統(tǒng)需要45天·人,難以滿(mǎn)足日益緊張的衛(wèi)星任務(wù)研制需求。
當(dāng)前船舶管路系統(tǒng)設(shè)計(jì)領(lǐng)域均已經(jīng)有了較完善的軟件增效模塊[1-6],衛(wèi)星推進(jìn)系統(tǒng)管路設(shè)計(jì)通過(guò)三維管道走向、焊縫自動(dòng)設(shè)計(jì)、模型三維標(biāo)注、物料清單(BOM)輸出等,一定程度提高了管路數(shù)字化水平[7],但管路自動(dòng)化設(shè)計(jì)程度仍然較低,需要大量人工導(dǎo)管連接和路徑調(diào)整,設(shè)計(jì)效率亟待提升,本文結(jié)合衛(wèi)星推進(jìn)系統(tǒng)管路研制的特點(diǎn),提出了一種基于原理圖驅(qū)動(dòng)的資源一號(hào)02D等遙感衛(wèi)星管路智能設(shè)計(jì)方法,通過(guò)頂層推進(jìn)系統(tǒng)原理驅(qū)動(dòng)衛(wèi)星管路系統(tǒng)快速設(shè)計(jì),結(jié)合管路系統(tǒng)專(zhuān)家?guī)鞓?gòu)建,構(gòu)建高效、智能的衛(wèi)星管路快速設(shè)計(jì)軟件系統(tǒng)。
1 原理圖驅(qū)動(dòng)的管路智能設(shè)計(jì)方法
典型衛(wèi)星管路系統(tǒng)設(shè)計(jì)過(guò)程和對(duì)周期如表1所示,一個(gè)新管路系統(tǒng)的布局設(shè)計(jì)需要經(jīng)歷管路原理圖分析(布局初步設(shè)計(jì))、管路三維走向設(shè)計(jì)、直屬件設(shè)計(jì)、焊縫標(biāo)注、管路設(shè)計(jì)檢查、管路焊裝模型送審、物料信息導(dǎo)出等步驟,其中管路布局和三維走向設(shè)計(jì)、直屬件設(shè)計(jì)和管路設(shè)計(jì)檢查占用整個(gè)管路設(shè)計(jì)過(guò)程近2/3的工作量,而且人工依賴(lài)程度高,精確度差,依管路設(shè)計(jì)師經(jīng)驗(yàn)差異設(shè)計(jì)水平也有所不同。
本文所提出的原理圖驅(qū)動(dòng)的管路智能設(shè)計(jì)方法,通過(guò)規(guī)范化的管路系統(tǒng)原理圖,解析生成表單自動(dòng)進(jìn)行衛(wèi)星管路系統(tǒng)的連接走向設(shè)計(jì),結(jié)合管路系統(tǒng)專(zhuān)家?guī)鞓?gòu)建,將頂層需求與三維模型設(shè)計(jì)直接互聯(lián),取代原衛(wèi)星管路系統(tǒng)中原理識(shí)別、模型轉(zhuǎn)化過(guò)程,同時(shí)反向?qū)⒐苈啡S模型與管路原理圖對(duì)比,實(shí)現(xiàn)管路走向設(shè)計(jì)自動(dòng)檢查復(fù)核,減少人工參與,大大提高設(shè)計(jì)效率和設(shè)計(jì)精度,如圖1所示。

表1 典型衛(wèi)星管路系統(tǒng)設(shè)計(jì)過(guò)程和周期Table 1 Design process and cycle of typical satellite piping system
該管路智能設(shè)計(jì)方法包含管路原理圖解析、管閥件快速布局、管路智能走向設(shè)計(jì)、管路設(shè)計(jì)智能檢查共4個(gè)步驟:
1)管路原理圖解析
管路原理圖解析包含3個(gè)執(zhí)行步驟:①預(yù)先通過(guò)建立模型庫(kù),在原理圖的管路組件中預(yù)置接口關(guān)信息;②通過(guò)原理圖的繪制過(guò)程建立管閥件之間的連接邏輯關(guān)系;③通過(guò)讀取原理圖中圖形屬性、連接關(guān)系信息,形成可擴(kuò)展標(biāo)記語(yǔ)言(XML)文件用于存儲(chǔ)邏輯信息。
可通過(guò)對(duì)衛(wèi)星推進(jìn)系統(tǒng)產(chǎn)品歸納,在閥體、管路等圖例中預(yù)先制定常用屬性信息,如入口、出口、管徑,介質(zhì)等屬性信息,建立衛(wèi)星推進(jìn)閥體、管線(xiàn)、管路交叉圖例庫(kù)(如圖2所示),實(shí)現(xiàn)管路原理圖的快速編制。
2)管閥件快速布局
管路系統(tǒng)三維設(shè)計(jì),首先應(yīng)進(jìn)行閥體設(shè)備的建模和布局,衛(wèi)星推進(jìn)系統(tǒng)閥體設(shè)備多為帶支架的異形設(shè)備,但一般為產(chǎn)品化產(chǎn)品,星上安裝支架及固定方式基本一致,衛(wèi)星管路系統(tǒng)的原理也大同小異,部分模塊甚至大部分推進(jìn)系統(tǒng)的原理基本一致,只是布局區(qū)域或應(yīng)用衛(wèi)星平臺(tái)有所差異,所以管閥件建模一般以復(fù)用的方式實(shí)現(xiàn),人工完成效率低下。因此,管路智能設(shè)計(jì)通過(guò)對(duì)衛(wèi)星推進(jìn)管路系統(tǒng)中被2個(gè)以上衛(wèi)星使用的管閥件支架組合、管閥件標(biāo)準(zhǔn)組合歸納梳理(如圖3所示),建立常用布局模型專(zhuān)家?guī)觳⑦M(jìn)行統(tǒng)一管理,供管路布局設(shè)計(jì)時(shí)選擇并快速裝配使用來(lái)提高設(shè)計(jì)效率[8]。
3)管路智能走向設(shè)計(jì)
傳統(tǒng)衛(wèi)星管路走向設(shè)計(jì)需要人工解析管路原理圖識(shí)別管路連接起始端點(diǎn),并且空間管道路徑連接一般需要多次路徑延伸、折彎、連接形成,操作繁瑣調(diào)整困難,原理圖驅(qū)動(dòng)的管路智能走向設(shè)計(jì)可以依據(jù)原理圖自動(dòng)檢查匹配模型并實(shí)現(xiàn)管路路徑快速連接和快速調(diào)整,具體步驟如下。
(1)閥體設(shè)備三維模型準(zhǔn)備和管路連接關(guān)系準(zhǔn)備:指在Pro/E系統(tǒng)中對(duì)照原理圖產(chǎn)品配套對(duì)管路系統(tǒng)所需的三維模型存在缺失情況進(jìn)行檢查,并通過(guò)管道原理圖解析得到管路連接關(guān)系,為下一步自動(dòng)管路布局設(shè)計(jì)提供依據(jù)。
(2)管路路徑快速連接和調(diào)整:管路路徑快速連接指按照解析管路原理圖,實(shí)現(xiàn)管道路徑的快速互連;管路路徑快速調(diào)整指在管路設(shè)置管路走向主路徑點(diǎn)(可為管路支架,也可為穿艙管道設(shè)計(jì)點(diǎn)位),控制管路自適應(yīng)布局在管路系統(tǒng)所在的艙板或柱形筒上,并可以通過(guò)倒角、偏移、折彎、角度調(diào)整功能快速對(duì)管路連接路徑進(jìn)行調(diào)整。
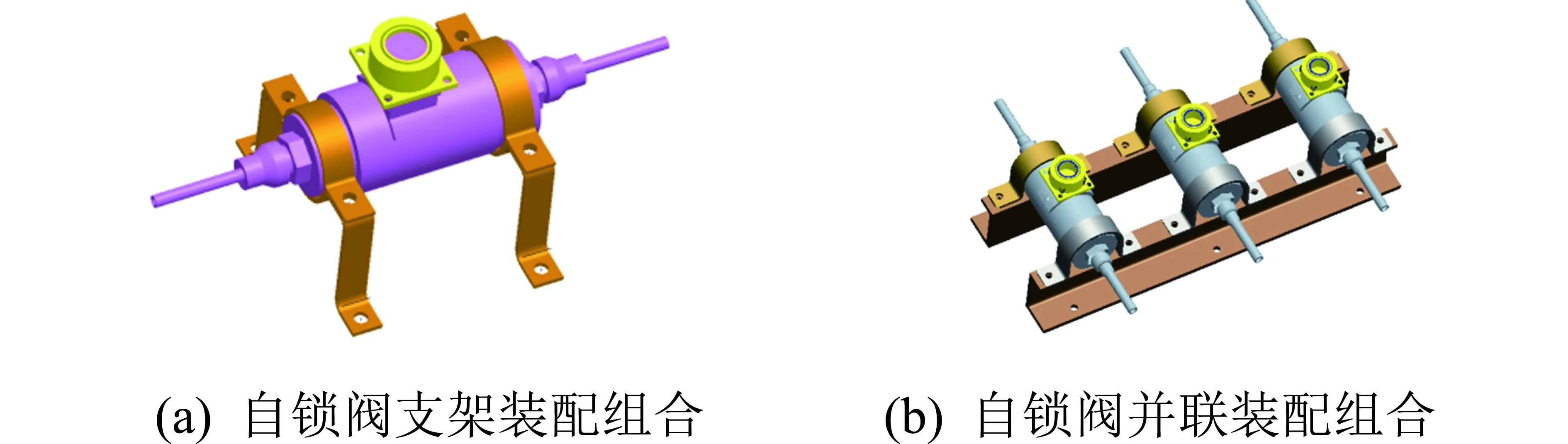

圖3 通用管閥件組合Fig.3 Pipe valves combinations in common use
(3)管路設(shè)計(jì)智能檢查包含以下功能:①管路連接正確性檢查,依據(jù)原理圖,對(duì)管道連接關(guān)系的正確性、管道外徑參數(shù)和閥體設(shè)備極性檢查。②管路直管段長(zhǎng)度檢查,對(duì)所有導(dǎo)管直管段長(zhǎng)度統(tǒng)計(jì)計(jì)算并進(jìn)行長(zhǎng)度檢查。③管路間距計(jì)算統(tǒng)計(jì),對(duì)所有導(dǎo)管間間距統(tǒng)計(jì)計(jì)算。④管路長(zhǎng)度折彎數(shù)對(duì)比,針對(duì)雙組元推進(jìn)系統(tǒng),貯箱連接管道的對(duì)稱(chēng)性要求,對(duì)與選定導(dǎo)管進(jìn)行管路長(zhǎng)度和折彎數(shù)對(duì)比。⑤X光正交雙向透照排查,所有焊縫X正交雙向透照視場(chǎng)干涉物檢查,不符合的高亮顯示。
通過(guò)程序遍歷訪(fǎng)問(wèn)相關(guān)對(duì)象并讀取管路加工參數(shù),并結(jié)合特定算法分析數(shù)據(jù)判斷設(shè)計(jì)是否符合生產(chǎn)標(biāo)準(zhǔn),代替人工檢查,既能降低管路設(shè)計(jì)的錯(cuò)誤率,又可提高管路設(shè)計(jì)師的工作效率。
2 設(shè)計(jì)實(shí)現(xiàn)與驗(yàn)證
2.1 設(shè)計(jì)實(shí)現(xiàn)
按照上述方法和實(shí)現(xiàn)步驟,利用C++語(yǔ)言二次開(kāi)發(fā)實(shí)現(xiàn)原理圖解析生成解析表格,利用三維設(shè)計(jì)軟件與XML的接口及其二次開(kāi)發(fā)功能,在管路三維設(shè)計(jì)中實(shí)現(xiàn)解析后管路原理圖的打開(kāi)、編輯和保存以及三維模型匹配檢查和設(shè)置。開(kāi)發(fā)功能實(shí)現(xiàn)管路閥件快速布局、管路智能走向設(shè)計(jì)和管路設(shè)計(jì)智能檢查功能[9-10],結(jié)合管路系統(tǒng)專(zhuān)家?guī)欤瑯?gòu)建從頂層原理圖驅(qū)動(dòng)的衛(wèi)星管路快速設(shè)計(jì)軟件系統(tǒng)(如圖4所示),其中管路系統(tǒng)專(zhuān)家?guī)彀y體及組合庫(kù)、閥體支架庫(kù)、管路連接件庫(kù)和管路支架庫(kù),具體如圖5所示。

圖5 管路系統(tǒng)專(zhuān)家?guī)霧ig.5 Expert database of piping system
2.2 應(yīng)用驗(yàn)證
資源一號(hào)02D衛(wèi)星應(yīng)用衛(wèi)星管路快速設(shè)計(jì)系統(tǒng)進(jìn)行設(shè)計(jì),依次進(jìn)行管路原理圖解析、管閥件快速布局、管路智能走向設(shè)計(jì)和管路設(shè)計(jì)檢查(如圖6~圖7所示)。經(jīng)驗(yàn)證,應(yīng)用該管路快速設(shè)計(jì)系統(tǒng)可以顯著提高設(shè)計(jì)效率,設(shè)計(jì)投產(chǎn)周期減少一半,如圖8所示。
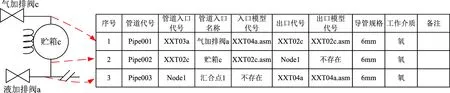
圖6 原理圖解析示例Fig.6 Example of digital analysis of schematic diagram of propulsion system
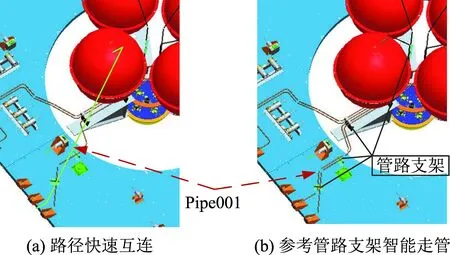
圖7 管路智能走向設(shè)計(jì)示例Fig.7 Example of automatic connection design of pipeline
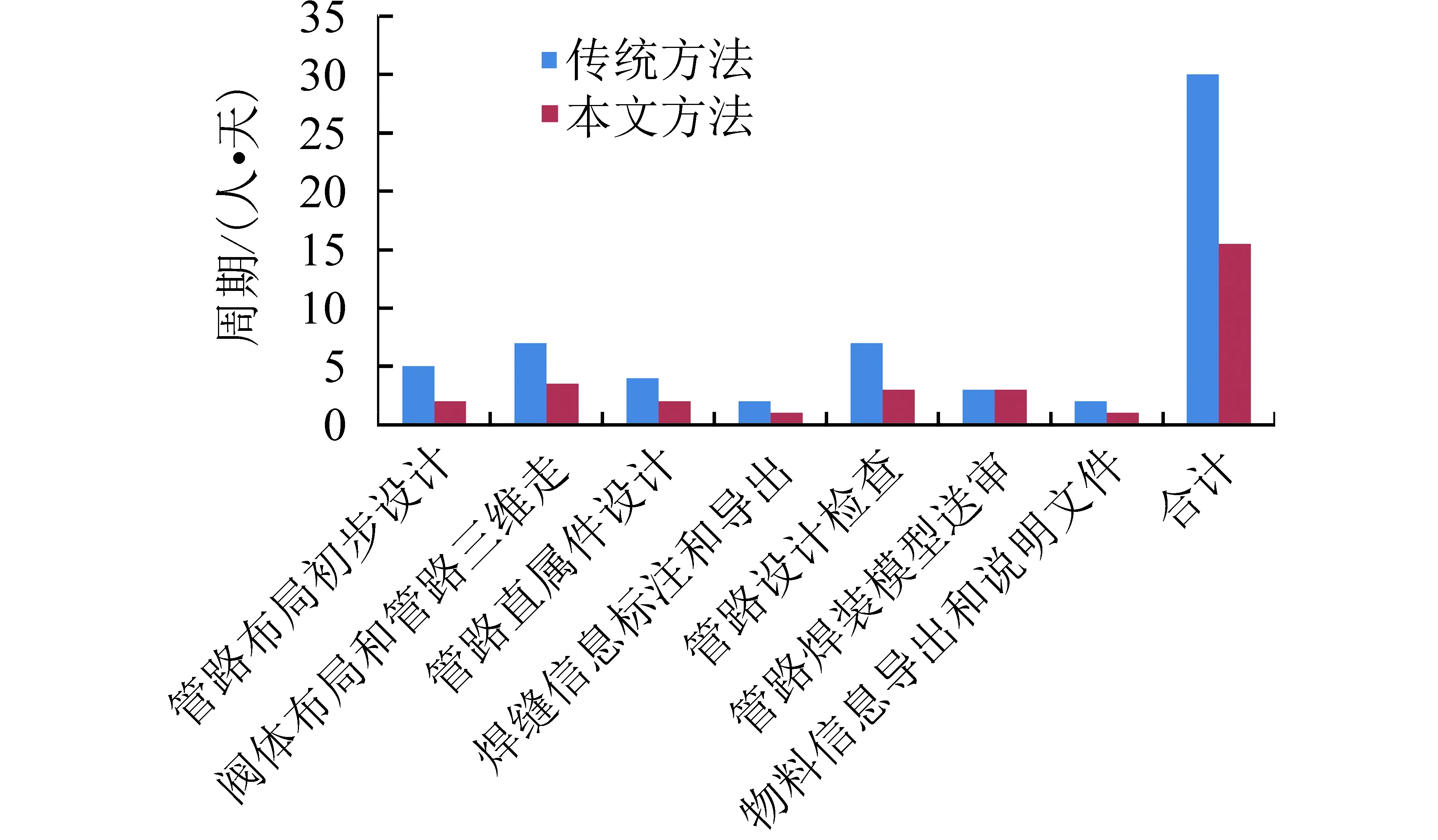
圖8 本文方法相對(duì)傳統(tǒng)方法增效對(duì)比圖Fig.8 Efficiency comparison using method in this paper with traditional method
3 結(jié)束語(yǔ)
結(jié)合衛(wèi)星推進(jìn)系統(tǒng)管路研制的特點(diǎn),提出了一種原理圖驅(qū)動(dòng)的衛(wèi)星管路快速設(shè)計(jì)方法,構(gòu)建了衛(wèi)星管路快速設(shè)計(jì)系統(tǒng)框架,并以此為基礎(chǔ)開(kāi)發(fā)了相應(yīng)的軟件系統(tǒng),經(jīng)資源一號(hào)02D衛(wèi)星應(yīng)用驗(yàn)證,可縮短管路設(shè)計(jì)周期,充分保證設(shè)計(jì)正確率,為面向基于模型的系統(tǒng)工程實(shí)施夯實(shí)基礎(chǔ)。鑒于本方法在項(xiàng)目前期良好的應(yīng)用效果,后續(xù)可以在其他衛(wèi)星研制中推廣應(yīng)用,以提升衛(wèi)星管路系統(tǒng)研制能力。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
