基于模糊控制的曝氣量智能控制
2020-12-24 07:57:12禹瑋
科技創新與應用
2020年26期
禹瑋
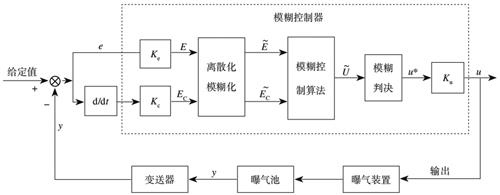

摘? 要:文章將模糊控制引入曝氣量控制中,使用MATLAB軟件輔助設計模糊控制器,并通過Simulink仿真驗證,使得污水處理過程中溶解氧值在工藝要求范圍內波動,證明了模糊控制器在曝氣量控制方面具有良好的控制效果。
關鍵詞:污水處理;曝氣量控制;模糊邏輯控制;DO值控制
中圖分類號:X703? ? ? ? ?文獻標志碼:A? ? ? ? ?文章編號:2095-2945(2020)26-0023-03
Abstract: In this paper, the fuzzy control is introduced into the aeration control, and the fuzzy controller is designed with the aid of MATLAB software, and verified by Simulink simulation, the dissolved oxygen value in the sewage treatment process fluctuates within the process requirements, which proves that the fuzzy controller has a good control effect in aeration control.
Keywords: sewage treatment; aeration control; fuzzy logic control; DO value control
引言
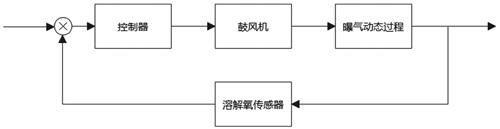
隨著我國經濟發展,社會對生態文明建設的不斷推進,對各種污染物排放標準也在不斷提高,這要求污水處理廠必須對現有工藝與控制方法進行改進。活性污泥法污水處理技術是污水處理常用的一種工藝,而其中曝氣量的控制有著重要意義。曝氣量不足容易使水質下降,達不到環保要求,而曝氣量過多,一則是使得污水硝化,水質品質下降,再則使得能耗增高,增加支出,經濟效益減低。由于污水處理動態過程復雜,一般控制方法難以達到要求。在實踐中,一般依靠人工經驗進行曝氣量的判斷,結果是能耗較大且控制效果不穩定。
智能控制是人們在探索傳統控制方法無法有效解決的一些工程問題時所發展的若干理論。而模糊控制是智能控制中應用較為廣泛的一種,該方法以模糊數學為理論基礎,將人們的實踐經驗用模糊數學的方法描述,使得該方法在一些非線性的領域具有不錯的控制效果。
本文將模糊控制引入曝氣量控制中,與傳統控制方法相比,模糊控制可以更自然有效地將人的控制策略和經驗轉換為機器可執行的控制策略[1]。……
登錄APP查看全文