衛星對接捕獲的地面微重力驗證系統
2020-12-24 01:35:56楊海濤安升輝
機械與電子 2020年12期
豐 飛,楊海濤,安升輝
(1.江蘇集萃華科智能裝備科技有限公司,江蘇 無錫 214000;2.華中科技大學無錫研究院,江蘇 無錫 214000)
0 引言
近幾十年來,全世界每年都有各種類型的航天器(衛星等)發射進入太空,同時,由于各種原因大量航天器也會發生失效或報廢,如某些組件失靈或燃料在完成其任務之前耗盡,這些情況往往會造成巨大的經濟損失[1- 2]。基于上述原因,航天器在軌服務(在軌維修和在軌維護)具有非常廣泛的應用需求,各國科學家都在圍繞這一主題開展相關關鍵技術研究。衛星在軌服務正在成為航天工業領域中一個非常具有挑戰性和重大意義的課題和研究方向。
衛星在軌對接捕獲操作是實現其在軌服務任務最關鍵的一步,對衛星在軌服務任務來說至關重要。衛星在軌服務的主要目的是實現其壽命延長、故障維修、在軌維護、在軌組裝和在軌燃料加注等空間任務。
2007年德國宇航局(DLR)提出了一項新的在軌維修任務,被稱為“德國軌道服務任務”(DEOS)[3-4]。其主要目的是通過安裝在自由飛行服務衛星上的機械臂系統,來演示在軌交匯和捕獲翻滾的非合作目標衛星的任務。德國宇航局的另一項在軌維修任務計劃是軌道壽命延長飛行器(OLEV)[5-7],該系統用于在軌維修正在遭受推進劑耗盡的對地靜止通信衛星并延長其在軌使用壽命。美國國防高級研究計劃局(DARPA)資助了軌道快車項目,主要用于驗證搭載空間機械臂的服務衛星進行航天器在軌維修任務的技術可行性,驗證內容包括了衛星在軌交匯、捕獲、維修、器件更換和補充燃料等空間技術[8-9]。日本成功發射了國際上第1個自由飛行空間機器人系統——“工程測試衛星VII”任務(ETS-VII),這是世界上第1個配備了機械臂的衛星,其發射成功是空間在軌服務的一個重要里程碑事件,極大推動了世界各國空間在軌服務項目的研究[10-11]。
1 衛星對接系統及其動力學特性
1.1 衛星對接系統
目前,在軌航天器絕大多數都是非合作目標衛星,不具備在軌維修的專用捕獲或對接接口。為了解決衛星的對接或捕獲問題,需要預先確定衛星對接或捕獲接口以設計專門的對接或捕獲工具。考慮到大多數衛星上所具有的共性特征,衛星的發動機噴嘴大小和形狀非常適合用作理想的衛星對接或捕獲接口。
在軌服務衛星的對接捕獲系統如圖1所示,該系統包括目標衛星和服務衛星。目標衛星上是在軌服務任務的目標,其本身具有發動機噴嘴以及火箭對接環,可以用作對接捕獲接口。服務衛星用于執行在軌服務任務,其衛星本體上安裝有太陽能帆板、全色高分辨率相機,以及專門針對目標衛星發動機噴嘴而設計的對接捕獲機構。
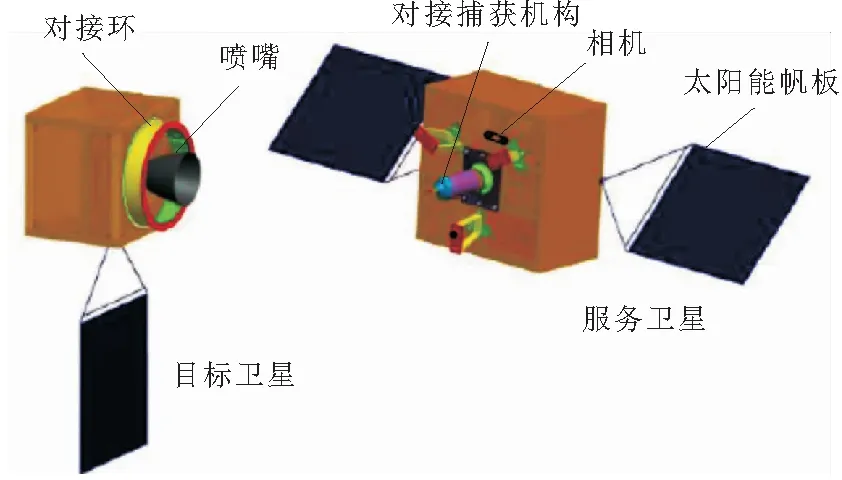
圖1 服務衛星和目標衛星系統
1.2 服務衛星和目標衛星對接捕獲動力學
為了簡化兩衛星在軌對接捕獲過程中接觸碰撞的動力學分析,可以考慮將目標衛星假定為自由漂浮的單剛體,暫時不考慮其軌道動力學。假設服務衛星在對接捕獲過程中接觸碰撞單剛體目標衛星。在接觸碰撞過程中,采用牛頓-歐拉方法分別建立服務衛星和目標衛星的動力學模型為:
(1)
(2)
MS和MT分別為服務衛星和目標衛星的廣義質量矩陣;VS和VT分別為服務衛星和目標衛星的廣義速度矢量;FeS和FeT分別為服務衛星和目標衛星的廣義外力矢量;FfS為服務衛星的科里奧利力、阻尼力和離心力等力矢量;FfT為目標衛星的科里奧利力、阻尼力和離心力等力矢量;JS和JT分別為服務衛星和目標衛星的雅克比矩陣;FC為服務衛星和目標衛星在對接過程中由于碰撞沖擊引起的廣義力矢量。
2 衛星對接捕獲地面驗證系統方案
衛星對接捕獲的地面微重力驗證系統,是用于驗證服務衛星在太空中對接捕獲目標衛星過程中運動狀況,目前采用硬件在環仿真方法來實現。該地面驗證系統的組成架構如圖2所示,主要包括實際硬件結構和軟件系統。該系統的實際硬件主要由2臺地面工業機器人、六維力/力矩傳感器、視覺相機、對接捕獲機構、服務衛星模擬器和目標衛星模擬器組成。軟件主要包括重力補償、接觸動力學、末端運動學等效和衛星的動力學模擬軟件等,主要用于模擬及計算服務衛星和目標衛星的在軌實際運動狀態。
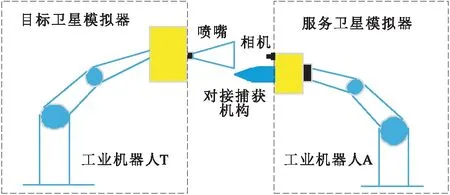
圖2 地面微重力驗證系統組成
衛星對接捕獲的地面微重力驗證系統的實現方案如圖3所示。目標衛星的運動模擬是通過工業機器人T的運動實現的。目標衛星在自由空間運動可以按照在微重力環境下單剛體運動來進行運動軌跡規劃。當服務衛星的對接捕獲機構接觸碰撞到目標衛星的噴嘴后,通過重力補償后,運動控制系統將接觸力和力矩信息,以及目標衛星運動信息傳遞給目標衛星動力學模擬器,目標衛星動力學模擬器將其運動狀態通過工業機器人末端對目標衛星的運動學等效,計算得到工業機器人末端的運動狀態。最后通過工業機器人T的逆運動學得到其關節伺服運動信息,從而通過工業機器人T的運動實現對目標衛星的運動模擬。
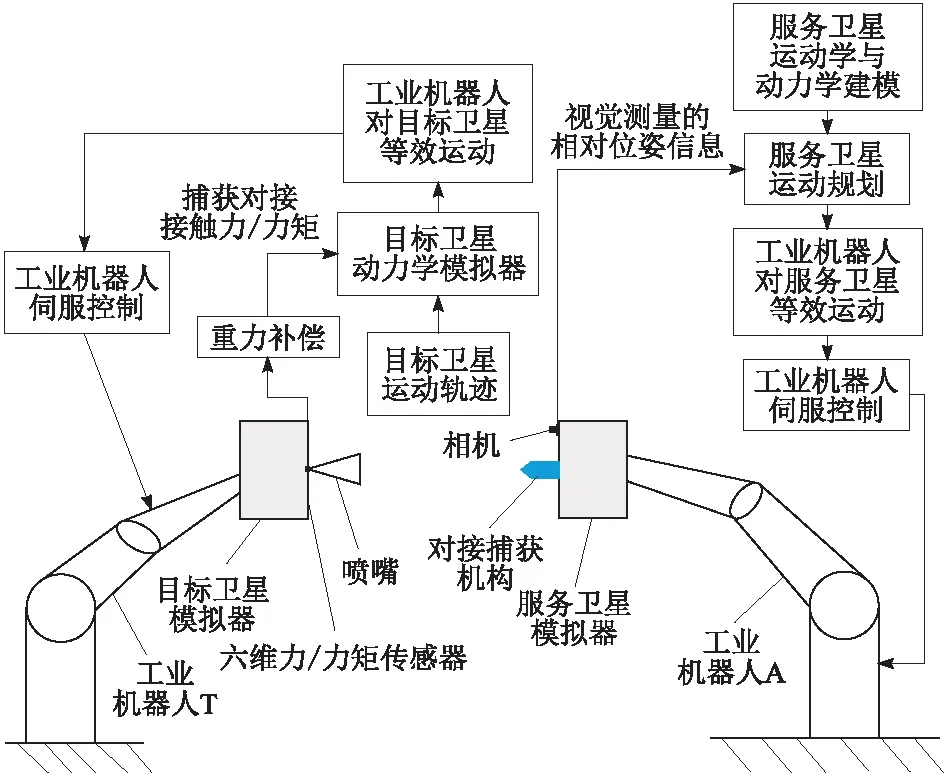
圖3 地面微重力驗證系統方案
服務衛星的運動模擬是通過工業機器人A的運動來實現的。服務衛星通過視覺相機測量服務衛星的對接捕獲機構相對于目標衛星的火箭發動機噴嘴的位姿信息,將相機測量的相對位姿信息通過服務衛星的運動學規劃和動力學模擬計算,得到服務衛星的運動信息。同樣,通過運動學等效實現工業機器人A末端對服務衛星的運動模擬,得到工業機器人A末端的運動狀態。通過工業機器人A的逆運動學得到其關節伺服運動信息,從而通過工業機器人A的運動實現對服務衛星的運動模擬。
3 坐標系轉換及運動學等效
在地面微重力驗證系統中,非常關鍵的一步是將兩衛星在太空中的運動與工業機器人末端在地面上的運動進行運動學等效。
運動學等效實現的基礎,是將衛星在太空的慣性坐標系和地面工業機器人的基坐標系進行坐標系轉換。坐標系轉換示意如圖4所示。

圖4 坐標系轉換示意
為推導工業機器人基坐標系與服務衛星慣性坐標系的轉換關系,設定工業機器人A的末端坐標系與服務衛星對接捕獲機構的末端坐標系相重合,則有
OAE=OSE
(3)
OAE為工業機器人A的末端坐標系;OSE為服務衛星對接捕獲機構的末端坐標系。
通過式(3)推導出工業機器人基坐標系與服務衛星慣性坐標系的轉換矩陣為
OAB=OSI·STTSE·(ABTAE)-1
(4)
OSI為服務衛星的慣性坐標系;OAB為工業機器人A的基坐標系;SITSE為服務衛星從慣性坐標系到對接捕獲機構末端坐標系的轉換矩陣;ABTAE為工業機器人A從基坐標系到末端坐標系的轉換矩陣。
同理,可以獲得目標衛星與工業機器人T的坐標系轉換關系。
服務衛星與工業機器人A的運動學等效過程如下:首先得到當前服務衛星相關的位姿及運動狀態信息,然后通過運動學轉換得到對接捕獲機構末端在工業機器人末端的等效位姿信息,最后利用工業機器人運動學逆解,得到等效的工業機器人關節角指令,從而實現對工業機器人A的運動控制。即通過運動學等效保證服務衛星和工業機器人A在操作空間的位姿是等同的。
同理,可以實現目標衛星與工業機器人T的運動學等效。
4 衛星對接捕獲地面驗證系統的建立
為了模擬在太空微重力環境下兩衛星對接捕獲的接觸碰撞過程,搭建了基于硬件在環的衛星對接捕獲地面微重力驗證系統。該地面微重力模擬驗證系統主要由2臺六自由度工業機器人、六維力/力矩傳感器、目標衛星模型、目標衛星噴管、服務衛星模型、對接捕獲機構(對接裝置)、衛星動力學模擬器、ABB工業機器人IRC5控制柜和中央控制計算機等組成。
2臺6自由度ABB工業機器人的末端分別安裝服務衛星模型和目標衛星模型,分別用于模擬服務衛星和目標衛星在太空微重力環境下的三維空間對接捕獲過程的運動狀況。目標衛星噴嘴連接六維力/力矩傳感器安裝在目標衛星模型上,對接捕獲機構安裝在服務衛星模型上,通過對接捕獲機構可以實現服務衛星對目標衛星噴嘴的對接捕獲操作。動力學模擬器主要用于計算衛星在接觸碰撞后的運動狀態。ABB工業機器人IRC5控制柜用于實現2臺6自由度工業機器人末端的運動控制。中央控制計算機負責整個系統的通信和運動控制。
衛星對接捕獲驗證系統的中央控制計算機與工業機器人1和工業機器人2的控制器之間,采用TCP/IP通信進行數據和相關信息的傳輸;同樣,與視覺處理計算機、衛星動力學模擬計算機、對接捕獲機構控制計算機之間也采用TCP/IP通信。中央控制器與六維力/力矩傳感器之間采用PCI總線通信。對接捕獲機構計算機與對接捕獲機構采用點到點串口通信總線(PPSeCo),如圖5所示。
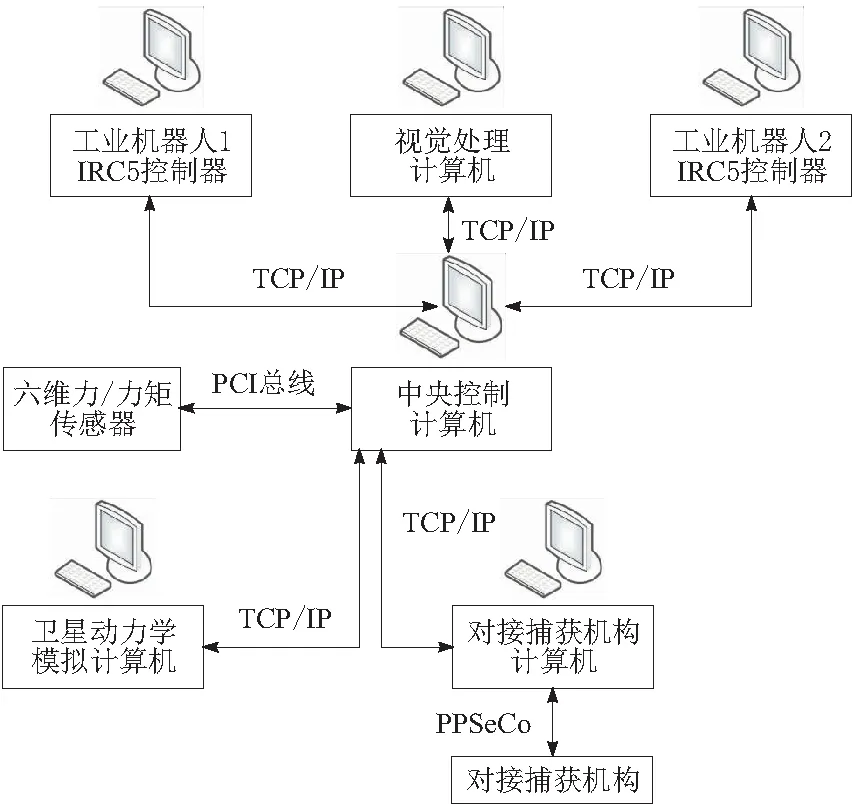
圖5 地面微重力驗證系統各功能模塊間的通信
5 衛星對接捕獲地面驗證實驗
在地面三維微重力驗證實驗中,六維力/力矩傳感器安裝在火箭發動機噴嘴與目標衛星模型之間。通過該傳感器可以實時測量在兩衛星捕獲對接過程中的接觸力/力矩信息,通過零力控制來實現在太空中微重力環境下,目標衛星與服務衛星在接觸碰撞過程中的自由漂浮運動狀態模擬。
在對接捕獲實驗過程中,首先通過視覺相機伺服引導服務衛星模型上的對接捕獲機構接近目標衛星模型上的火箭發動機噴嘴機構。
當服務衛星的對接捕獲機構和目標衛星的噴嘴接觸碰撞后,目標衛星這邊的工業機器人T根據六維力/力矩傳感器測量的力/力矩信息,通過零力控制來實時調整工業機器人T末端的運動狀態。
圖6給出了服務衛星模型上的對接捕獲機構與目標衛星模型上的噴嘴,在對接捕獲過程中的接觸力/力矩信息。圖6中,Fx、Fy和Fz分別為兩衛星對接捕獲在x、y、z3個方向測量的實際接觸力;Tx、Ty和Tz分別為繞x軸、y軸和z軸測量的實際接觸力矩。由圖6中可以看出,在接觸碰撞最劇烈的情況下,碰撞的接觸力基本上保持控制在±20 N之內,接觸力矩基本上保持控制在±100 N·m之內,在后期對接捕獲完成后,接觸力/力矩基本都接近0。這說明在服務衛星在對接或捕獲目標衛星過程中,碰撞的接觸力/力矩是可控的。服務衛星可以成功地實現在太空微重力環境下對自由漂浮目標衛星的對接捕獲操作。
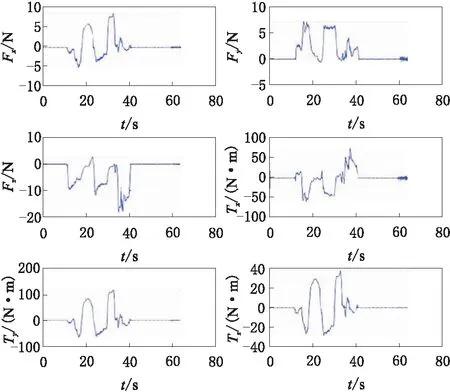
圖6 兩衛星對接捕獲的接觸力/力矩
服務衛星和目標衛星的對接捕獲地面微重力驗證實驗如圖7所示。通過該地面驗證系統,在圖7a中模擬再現了兩衛星在軌對接捕獲前的初始狀態,在圖7b中模擬再現了兩衛星對接捕獲后的最終狀態。

圖7 衛星對接的地面驗證實驗
6 結束語
本文研制開發了一套在太空中兩衛星對接捕獲操作的地面微重力驗證實驗系統。在該系統中,2個地面固定基座工業機器人采用運動學等效和動力學模擬的方法,來分別模擬服務衛星和目標衛星在太空微重力環境下的運動狀況。該系統可以驗證兩衛星在對接捕獲過程中的接觸碰撞情況以及運動狀態。通過地面微重力驗證系統的實驗結果,說明了服務衛星可以成功地在軌對接捕獲目標衛星。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
今日農業(2019年14期)2019-09-18 01:21:54
今日農業(2019年12期)2019-08-15 00:56:32
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
今日農業(2019年10期)2019-01-04 04:28:15
今日農業(2019年15期)2019-01-03 12:11:33
今日農業(2019年16期)2019-01-03 11:39:20