圓柱陣多波束漁用聲吶波束形成性能分析
2020-12-24 13:39:34宗艷梅李國棟諶志新唐學大尹項博湯濤林
漁業現代化 2020年6期
宗艷梅,李國棟,,諶志新,,唐學大,尹項博,湯濤林,
(1 青島海洋科學與技術試點國家實驗室,山東 青島 266237;2中國水產科學研究院漁業機械儀器研究所,上海 200092)
為了獲得更高的探測能力和空間分辨率,漁業聲學探測技術向著多波束[1-2]、多頻[3-4]和寬帶[5-7]等技術方向快速發展。多波束漁用聲吶作為海洋漁業精準、高效捕撈的重要水聲助漁設備之一,在獲取海洋漁業資源的豐度及數量等信息方面有著廣泛的應用[8-10]。中國漁用聲吶技術水平與世界先進水平相比,在魚群高分辨率、遠距離探測等諸多領域還存在著較大差距。近年來,隨著微電子、新材料、新工藝以及信號處理技術的迅速發展,為研制智能魚群識別、精準高效捕撈的高性能多波束漁用聲吶帶來了新的發展方向[7,11]。
換能器基陣的指向性是反映多波束漁用聲吶探測性能的重要指標之一,圓柱型基陣在垂直和水平方向均具有指向性,且能實現空間全方位掃描,因此廣泛應用于海洋漁業聲吶系統中。但由于換能器陣各種元器件在結構、工藝上的誤差并不是完全一致的,基陣中的每個通道也存在不一致性,導致信號通過每個陣元的輸出存在一定幅度、相位和頻移的偏差[12]。由于上述偏差的存在,影響到換能器陣的波束指向性,并降低多波束漁用聲吶的探測性能。
本研究從多波束漁用聲吶工作原理出發,建立256路稀疏圓柱陣的三維模型,對圓柱陣在垂直和水平方向波束形成進行仿真,重點研究陣元幅度偏移、相位偏移及頻移和不同工作頻點對圓柱陣垂直和水平方向波束形成性能的影響。
1 多波束漁用聲吶基本原理
漁用聲吶(探魚儀)作為一種水下聲波探測設備,實質是一種主動聲吶系統,利用聲波在水中的傳播和遇到物體反射原理來探測水下目標并獲取其距離、深度及數量等信息[13-14],其早期主要用于垂直探測漁船下方的魚群目標。為不斷擴大探測目標范圍,提高探測效率,漁用聲吶由單波束向多波束方向發展,其工作示意圖如圖1所示。
單波束是指聲學基陣的自然方向圖形成后,利用其在θ=0°方向上的極值點進行定向。由于單波束的波束寬度較小,若要搜索360°的水平空間,需要轉動這個波束,因搜索整個空間速度太慢,導致探測效率低下[13]。多波束漁用聲吶通過對發射信號的全向發射提高探測范圍,對回波信號定向接收來準確定位魚群位置,大大提高了魚群探測效率[4-5,13]。多波束的形成是利用改變陣元間接收信號的時間差(τ)或補償一定相位的方法,形成在某一方向上的極大值,基陣由多個扇區對應多個信號通道,空間可以形成多個極大值,即形成多個波束。多波束形成原理如圖2所示。
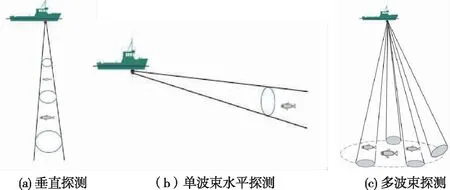
圖1 漁用聲吶工作示意圖

圖2 多波束形成原理框圖
多波束技術的發展為波束形成系統提供了360°全方位、實時跟蹤的能力,同時,布陣方面進展也較快,基陣的幾何形狀由直線和圓發展到平面陣、圓柱陣及球形陣[15]。多波束漁用聲吶采用圓柱型換能器布陣,可以實現以漁船為中心水平360°及垂直70°掃描。其發射采用基于電子掃描技術的掃描旋轉定向發射,即在一個扇區內發射多個波束,然后水平旋轉第二個扇區發射多個波束,保證不同方位角扇區都可以被掃描覆蓋,同時采用多個陣元同步接收[15-17]。
2 圓柱多波束漁用聲吶空間建模及波束形成
2.1 圓柱陣多波束漁用聲吶空間建模
根據技術要求,圓柱陣多波束漁用聲吶換能器采用縱向陣元錯開排列方式,垂直方向上每列M個陣元,組成均勻線陣,共N列,水平方向每行N個陣元,組成均勻圓陣,共M行,共計256個陣元組成圓柱陣。其三維建模參數如下:垂直方向陣元數(M)為8個,水平方向陣元數(N)為32個,有效陣元數(L)為256個,圓柱陣高度(H)為0.357 m,垂直陣元間距(D)為0.042 m,圓柱陣直徑(R)為0.370 m。為便于分析,以圓柱陣中心O為原點,建立如圖3所示的坐標系。為更直觀的分析基陣波束形成指向性,將圓柱陣分為8個虛擬扇區,取水平方向X軸正向左右各四列陣元為第一扇區,XOY平面逆時針旋轉,向后旋轉四列為第二扇區,即相鄰扇區之間相差45°,且有四列陣元與前一個扇區重合,其扇區劃分如圖4所示。
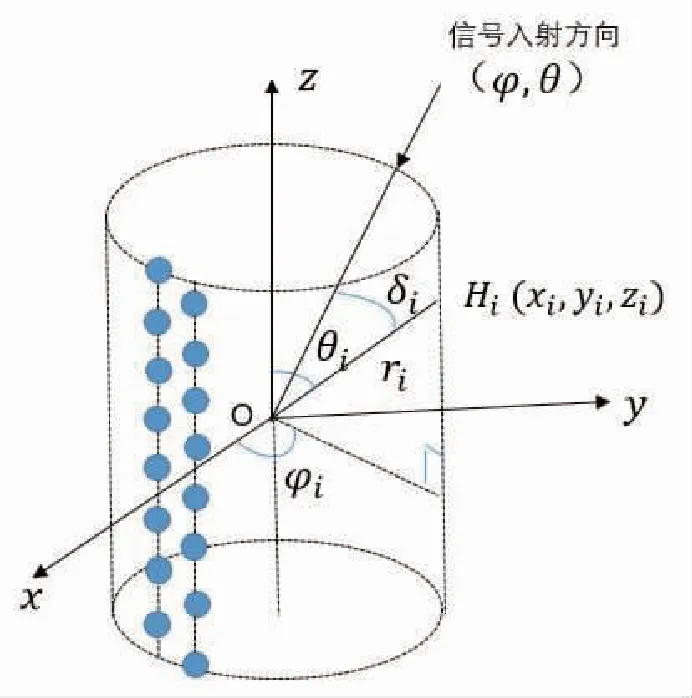
圖3 圓柱型離散陣坐標系
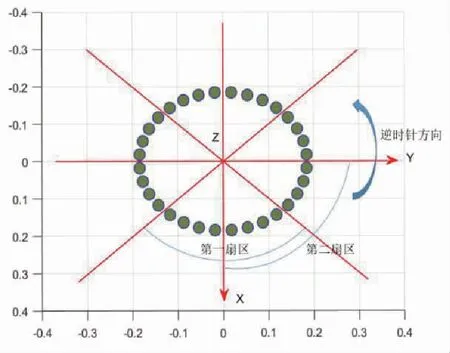
圖4 圓柱陣扇區劃分示意圖
依此類推共將圓柱陣分為8個虛擬扇區,水平方向一個扇區包含8個陣元。以圖3坐標系為參考,根據圓柱陣的布陣方式及上文三維建模參數建立256路圓柱陣三維模型,即水平方向32個陣元,垂直方向8個陣元,共計256路,如圖5所示;第二扇區三維模型,即水平方向8個陣元,垂直方向8個陣元,一個扇區共計64路,如圖6所示。以下研究均以第二扇區進行仿真分析。

圖5 圓柱陣三維建模
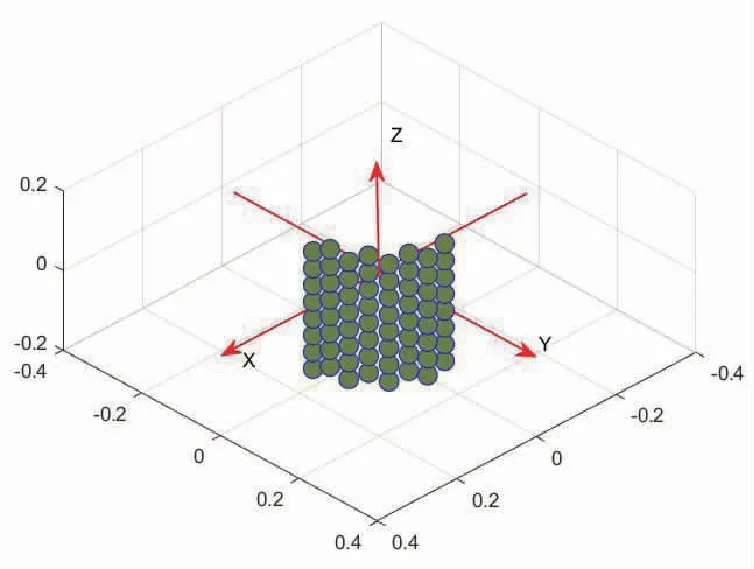
圖6 第二扇區三維建模
2.2 圓柱陣多波束漁用聲吶波束形成算法
結合典型多波束漁用聲吶和技術要求,圓柱陣波束形成仿真參數如下:目標強度為0 dB,工作頻率為(20~30) kHz,中心頻率為25 kHz,脈沖寬度為0.004 s,窄帶信號帶寬為0.25 kHz,聲速為1 500 m/s,陣元開角為78°。
根據圖3坐標系和圓柱陣三維建模參數及波束形成仿真參數,圓柱陣有效陣元個數為L,Hi表示第i個陣元,其直角坐標系坐標為(xi,yi,zi),球坐標為(θi,φi,γi),兩者關系如下:
(1)
式中:xi,yi,zi分別為直角坐標系下第i個陣元在X軸、Y軸、Z軸的坐標,m;θi,φi,γi分別為球坐標系下第i個陣元的俯仰角、水平角及距離,m。
OHi與坐標Ox,Oy,Oz軸的夾角分別是αi,βi,ri,假定入射信號方向為(θ,φ),與Ox,Oy,Oz軸的夾角分別是α,β,γ,可推導出:

(2)
式中:θ為俯仰角;φ為水平角。
信號入射方向與向量OHi之夾角用δi來表示,可推導陣元Hi與參考點O的聲程差為:
di=γicosδi=xicosα+yicosβ+zicosγ=xisinθcosφ+yisinθsinφ+zicosθ
(3)
對L個陣元求和,得到基陣空間指向性函數一般表達式:
(4)
式中:Ai為第i個陣元的加權值;Δζi=ζi-ζi0,ζi為相位差;ζi0為期望波束方位為(θ0,φ0)時,Hi信號應當被補償的相位,其表達式如下:
(5)
式中:λ為波長,m;(θ,φ)為來波方向;(θ0,φ0)為期望方向。
由式(4)計算得到的指向性函數是一個二維函數,通常在某一個截面上觀測。根據上述空間指向性函數的求解原理,運用乘積定理把圓柱陣空間指向性的計算簡化為平面指向性的計算[7]。參照式(1)~(5)基陣空間指向性原理和波束形成仿真參數,根據技術要求,每個陣元開角78°,期望波束方向(θ0,φ0)為(90°,0°),對圓柱陣指向性進行仿真,得到圓柱陣第二扇區的空間指向波束圖,如圖7所示。

圖7 圓柱陣第二扇區空間波束圖
從圖7可看出,圓柱型基陣在垂直和水平方向均具有指向性,波束主瓣方向為期望方向(θ0,φ0),為(90°,0°)。改變基陣指向方向可以使基陣波束主瓣出現在期望方向,加陣元指向后,旁瓣降低,第一旁瓣下降至-13 dB,主瓣指向性更突出。
3 圓柱陣多波束漁用聲吶波束形成性能分析
3.1 幅度偏移對圓柱陣波束指向性影響性能分析
在幅度和相位偏移的研究中,一個常見的假設是誤差可以用一個隨機過程來描述,假定誤差服從均勻分布或正態分布,用一個特征函數來表示幅度和相位的偏移量[18-21]。假定幅度偏移服從均勻分布,用特征函數δ表示標準幅度偏移量,分別研究不同幅度偏移下對波束指向性的影響。在圓柱陣第二扇區,垂直方向由相鄰兩列交錯排布的16個陣元組成一個直線陣(如圖8左),水平方向由相鄰兩行交錯排布的8個陣元組成一個圓弧陣(如圖8右)。
每個換能器陣元分別增加幅度偏移,分別仿真圓柱陣垂直和水平方向幅度偏移量系數為-20 dB、-10 dB、10 dB、20 dB時對第二扇區波束指向性的影響,仿真結果圖9所示。
從圖9可看出,幅度偏移對垂直和水平方向波束指向性主瓣略有影響,主瓣變寬,對旁瓣影響較大。為進一步分析幅度偏移對其第一旁瓣的增益影響,在幅度偏移量系數在-20~30 dB范圍內進行多次迭代并取平均值,從仿真結果圖10可看出,幅度偏移對圓柱陣垂直方向第一旁瓣影響較大,偏差在3 dB以上,在偏移量小于-15 dB時影響較大,可達6 dB以上;對水平方向第一旁瓣影響略小,當偏移量在-5~20 dB范圍內時可控制第一旁瓣偏差在3 dB以內。
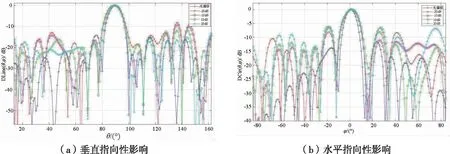
圖9 幅度偏移對圓柱陣波束指向性影響
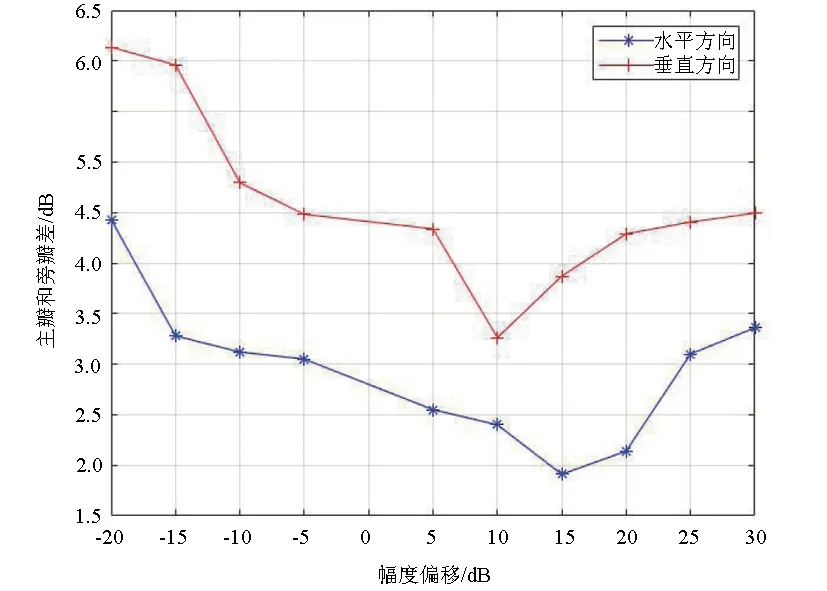
圖10 幅度偏移對主瓣和旁瓣差影響
3.2 相位偏移對圓柱陣波束指向性影響性能分析
假定相位偏移服從均勻分布,用特征函數ζ表示標準相位偏移量[22-23],每個換能器陣元在垂直和水平方向分別增加相位偏移,分別仿真圓柱陣垂直和水平方向相位偏移量系數為-20 dB、-10 dB、10 dB、20 dB時對第二扇區波束指向性的影響。仿真結果如圖11所示。
從圖11可看出,相位偏移對垂直和水平方向波束指向性主瓣略有影響,旁瓣影響較大,主瓣變寬,旁瓣增大。為進一步分析相位偏移對其第一旁瓣增益影響,對相位偏移系數在-20~30 dB范圍內進行多次迭代并取平均值,仿真結果如圖12所示。
從圖12可看出,相位偏移對圓柱陣第一旁瓣影響較大,偏移量在-5~15 dB范圍內時第一旁瓣偏差在3 dB左右,超出此范圍,偏差可達3 dB以上。
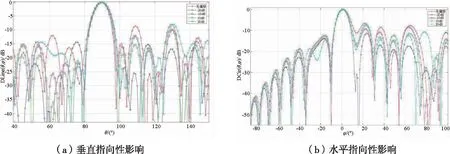
圖11 相位偏移對圓柱陣波束指向性影響
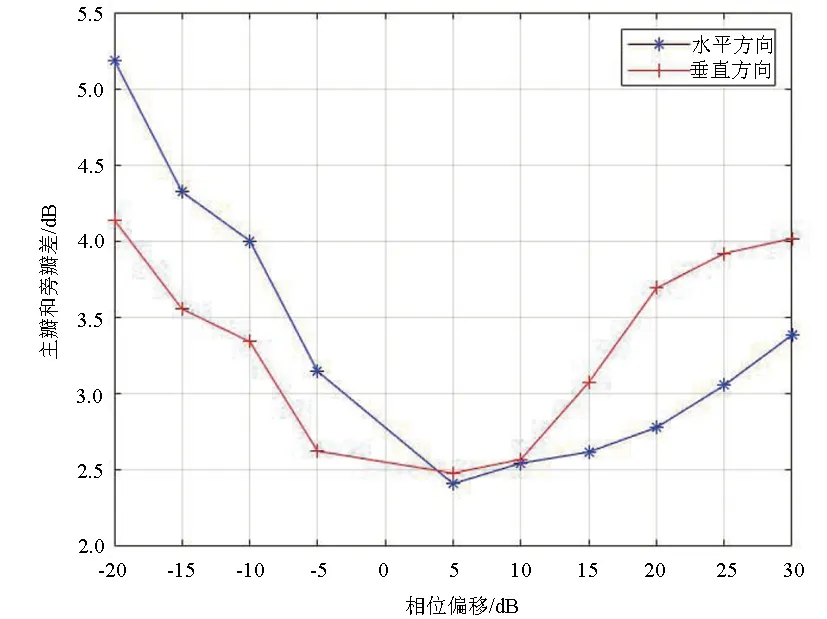
圖12 相位偏移對主瓣和旁瓣差影響
3.3 頻移對圓柱陣波束指向性影響性能分析
圓柱陣多波束漁用聲吶的指向性除了會受到幅度和相位偏移的影響,通常與工作頻率的選取也有很大關系。為了獲得最佳的波束指向性,選擇頻率時要考慮探測距離、目標大小、搜索范圍及目標自身的反射強度(目標強度)[24-25]等多方面因素,這就要求根據給定的技術指標,選擇最佳頻率。對于一般近程小目標(如探魚聲吶),頻率一般可取幾十千赫到幾百千赫[24]。根據技術要求,文中分析了(20~30) kHz范圍內共計11個工作頻點下單個頻點對圓柱陣垂直和水平方向波束指向性的影響。
通過仿真可知工作頻點對波束指向性有較大影響,尤其對主瓣寬度及旁瓣均有影響。為進一步分析頻點對主瓣寬度影響,對(20~30) kHz頻點下進行仿真,仿真結果如圖13所示。
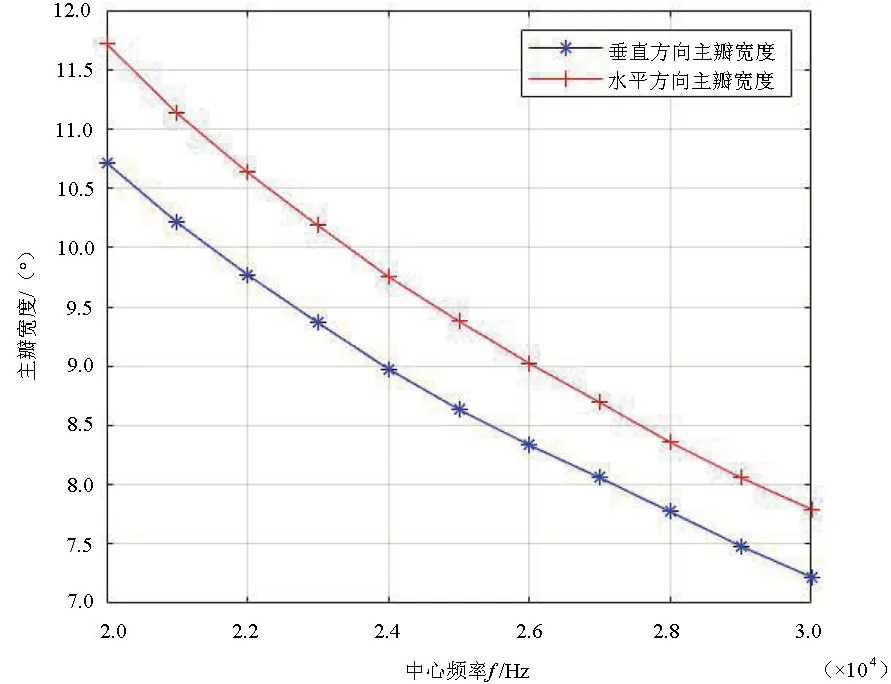
圖13 工作頻點對圓柱陣指向性主瓣寬度影響
從圖13中可以看出,圓柱陣垂直和水平方向波束寬度都隨著頻率的增大而逐漸減小,垂直方向頻點為20 kHz時主瓣寬度為10.72°,水平方向頻點為20 kHz時主瓣寬度約為11.72°,頻點在(20~30)kHz之間變化時,垂直方向主瓣寬度約偏移3.5°,水平方向約偏移3.9°。研究結果表明,圓柱陣垂直和水平方向的主瓣寬度隨中心頻率增大而變小,但在實際的海洋傳輸信道上,由于存在復雜的波導效應,最佳頻率并不是越低越好,還要根據海區水深、海底類型以及探測目標等多種因素綜合考慮[24]。
由于振動源與目標之間有相對運動,換能器基陣所收到的聲波頻率與振動源的頻率會有所偏移,即多普勒頻移。在漁用聲吶實際工作時是隨船而運動的,所以聲源的速度就是船速,根據多普勒效應原理,漁用聲吶實際接收到的回波頻率為:
(6)
實際C>>u、C>>v,得多普勒頻移為:
(7)
式中:f為聲源振動頻率,Hz;u為聲源移動速度,m/s:v為目標移動速度,m/s;C為海水聲速,m/s。
實際海洋探測中,船速與信號發射方向間有一個夾角(θ)存在,在魚群跟蹤時,θ在不斷變化,因此Δf也是隨探測角而變化。通常多普勒頻移只占探測頻率的1%左右,根據式(6)~(7),分析頻點為25 kHz時頻移對圓柱陣波束形成的影響,仿真結果如圖14所示。
從圖14可以看出,頻移控制在1%以內,對圓柱陣垂直和水平方向波束指向性影響較小,旁瓣約有1~3 dB變化,主瓣影響很小。現代電子技術已能從微小的多普勒頻移中推求出魚群移動速度的大小和方向,因此在混響環境中可利用多普勒頻移來提高目標的檢測能力。
綜上所述,圓柱陣多波束漁用聲吶探測性能受波束形成系統的影響,而波束形成系統作為其核心部件,性能又受到幅度、相位偏移和頻移等多方面因素的影響。其中,幅度和相位偏移對圓柱陣波束主瓣和旁瓣影響較大,應控制幅度、相位偏移在一定范圍內,盡可能縮小其偏移對圓柱陣指向性的影響。偏移過大會導致圓柱陣指向性主瓣變寬、旁瓣增大,從而導致基陣指向性變差、分辨率降低。工作在不同頻點下,波束主瓣寬度影響較大,頻移對波束指向性影響較小。因此,選擇最優的頻率,并從幅度和相位偏移對波束指向性角度考慮,將幅度、相位偏移控制在一定范圍內,將有益于提升圓柱陣多波束漁用聲吶探測性能。
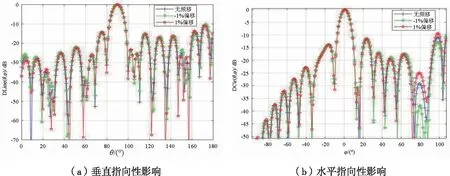
圖14 頻移對圓柱陣波束指向性影響
4 結論
在不同影響條件下對圓柱陣多波束漁用聲吶波束形成性能的仿真分析發現,其波束指向性受到陣元幅度偏移、相位偏移及頻移等多方面因素綜合影響。幅度和相位偏移對圓柱陣波束指向性影響較大,其波束指向性主瓣變寬,旁瓣變大,頻移對其波束指向性影響較小;頻點對波束主瓣影響較大。因此,提升圓柱陣多波束漁用聲吶探測性能,應綜合考慮波束形成系統幅度、相位偏移及頻移等因素,根據不同探測環境調整漁用聲吶的技術參數指標,以提升圓柱陣多波束漁用聲吶探測性能。
猜你喜歡
中學生數理化·八年級物理人教版(2022年3期)2022-03-16 05:55:08
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
當代陜西(2021年2期)2021-03-29 07:41:24
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
媽媽寶寶(2017年3期)2017-02-21 01:22:28
中國塑料(2016年3期)2016-06-15 20:30:00
通信電源技術(2016年3期)2016-03-26 07:13:38
