汽車儀表的雙全H橋步進電機驅動功能實現
2020-12-23 04:23:54陸敬泉
汽車科技 2020年6期
陸敬泉


摘 ?要:構建了汽車組合儀表的步進電機軟、硬件驅動方案,重點設計了雙全H橋步進電機的微步電壓的實現方式以及脈沖序列的實現方法,繪制了電機空載回零的理想變速曲線。通過詳細設計、計算分析與實驗驗證,該驅動能可靠滿足汽車組合儀表步進電機驅動指針在各種變速、勻速過程中的平穩、順滑運行。同時能滿足全自動化生產線對電機驅動空載回零和自動校正的生產工藝要求。該設計具有可靠性高、易實現、低成本、可移植的特點,該設計的應用在某種程度上使公司在組合儀表步進電機驅動技術上實現了突破,從而提高公司的產能和產品質量。在取代競爭對手為公司創造良好經濟效益的同時。該驅動方法可推廣移植應用于其他汽車組合儀表設計上,實現該技術的持續增盈。
關鍵詞:汽車儀表;步進電機;驅動
中圖分類號:U463.2 ? ? 文獻標識碼:A ? ?文章編號:1005-2550(2020)06-0092-08
Abstract: The software and hardware drive scheme of the stepper motor of the automobile combination instrument is constructed, and the realization method of the micro-step voltage of the double full H-bridge stepper motor and the realization method of the pulse sequence are designed with emphasis, and the ideal speed curve of the motor returning to zero without load is drawn. Through detailed design, calculation analysis and experimental verification, the drive can reliably meet the smooth and smooth operation of the stepper motor driving pointer of the automobile combination meter in various variable speed and uniform speed processes. At the same time, it can meet the production process requirements of the fully automated production line for the motor drive no-load return to zero and automatic correction. The design has the characteristics of high reliability, easy implementation, low cost, and portability. The application of this design has enabled the company to achieve a breakthrough in combination instrument stepper motor drive technology to some extent, thereby improving the company's production capacity and product quality . While replacing competitors to create good economic benefits for the company. This driving method can be popularized and transplanted to other automobile combination instrument design, and realize the continuous profit increase of this technology.
Key Words: Automobile Instrument; Stepper Motor; Drive
1 ? ?技術背景
根據東風商用車有限公司的需求。為其東風新天龍D320設計一款24V電氣系統的5寸彩屏組合儀表,該款組合儀表包含有車速表、轉速表、油量表、水溫表四個表頭電機。該項目是我公司重點項目,且由于公司生產工藝的進步,公司引進了自動化儀表組裝生產線。其中包含全自動壓指針工位和指針自動校準工位,結合具體的生產工藝要求,在儀表上電后,儀表電機需要在未壓入指針的情況下通過上電自檢過程,將電機自動運行到零位(機械零位)。且在電機運行時不能有抖動、回零誤差、指針回彈等現象。否則就會產生指針指示誤差范圍大,儀表生產線產品通過率低等隱患。
2 ? ?策略設計
根據技術背景可知,此款組合儀表的電機的自檢回零(機械大回零)驅動功能,必須滿足在電機空載(未壓入指針)的狀態下針軸能夠從任意位置回到零位(機械零位)。由于此時并未壓入指針,電機的轉動慣量非常低。普通的回零變速曲線已經無法滿足需求,需要優化調整。且在電機運行過程中,電機的驅動力要達到最優,既不能過大也不能過小。如果過小,在空載狀態下電機是無法通過電磁力驅動針軸同步轉動,產生失步;而如果過大,電機的運行又不夠平滑,同時電機在機械零位的堵轉過程中也會產生較大的噪音和抖動。影響用戶體驗。
通過以上分析,儀表的步進電機驅動功能設計為:
1.儀表電機的微步電壓設計:將理論電壓值調整到步進電機的優化范圍上限。以便提高電機驅動力。同時要考慮儀表微控制器(MCU)的電機驅動外設內阻。將實際的微步電壓與理論計算得出的微步電壓進行比對和校正。
2.儀表電機的大回零變速曲線設計:速度變化量不能過大,角加速度要盡量保證一致,且不能過低或過高。同時,電機的最大角速度又不能太高。防止丟步。
3 ? ?步進電機基本驅動原理設計
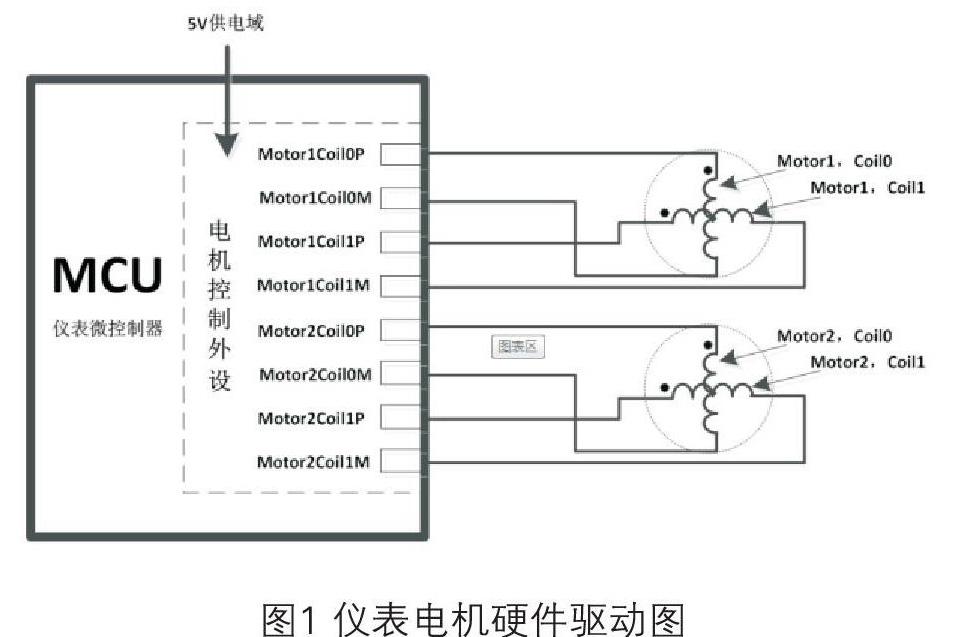
儀表電機驅動硬件電路如圖1所示:
圖示中,儀表微控制器(mcu)內部包含一個步進電機驅動外設,該外設可以同時驅動4個步進電機(圖示中只標出了兩組)。每組分別驅動一個步進電機。在雙全H橋驅動模式下,每個步進電機由4根硬線信號控制,分別驅動步進電機內部的兩個橋線圈(Coil),從而產生兩個相互垂直的電磁力,驅動電機轉子。電機內部結構如圖2所示,x,y分別指示左右線圈(Coil0,Coil1)。
線圈通電產生電磁合力驅動轉子轉動,轉子到指針的傳動比為180:1(跟電機型號相關),即轉子轉動180度,指針轉動1度。線圈上通過大小方向不同的電流控制轉子轉動的快慢與方向,進而驅動電機的指示。電機的等效模型如圖3所示。轉子本身也是一個指南針,當與線圈產生的合力磁場有偏差時,轉子轉動。
兩線圈電路Lx,Ly大小方向可變,同時作用可產生不同的電磁合力。合力如圖4所示:
若兩線圈電流為輸入為相位差60°的正弦信號,可保證電磁合力Fr的大小恒定方向勻速變化,既可以得到勻速平滑的轉子轉動。運動圖示如圖5所示:
4 ? ?步進電機詳細驅動設計
4.1 ? 微步電壓驅動實現
由于是采用24微步步進電機,需要將一個正弦周期24等分,每個等分點成為一“步”,對應的電壓值為Vi。如圖6所示:
vi/V即該路線圈PWM控制的占空比。如在相位為30°時vi/V=0.5,則輸出的占空比為50%;而在相位為120°時vi/V=-0.5,輸出的電流反向,占空比為50%。若占空比勻速變化,電機勻速轉動;若占空比加速改變,則電機做加速運動;若占空比減速變化,則電機做減速運動。
根據項目使用的步進電機其線圈推薦值最大電流Imax=15.30mA,其線圈內阻為280+/-20 Ohms。因此得正弦波峰值電壓為15.30×280≈4.28V,根據其技術手冊各個微步線圈電流計算如表1:
將線圈內阻代入之后可得到理論微步電壓值如表2:
通過控制每個線圈上的PWM占空比即可控制線圈的驅動電流或電壓。我們可以將線圈“電壓值”與“PWM占空比”成線性關系對應起來。由于單片機的電機驅動外設為5V供電域,其能提供的最大電壓為5V(線圈上的PWM占空比為100%),而其PWM的最大分辨率為8bit,因此就可以通過設置其PWM占空比控制寄存器來實現控制各個微步的電壓值(公式1)。并通過公式1計算出全周期的所有占空比寄存器的值,如表3。
因此我們在程序中做了如下參數定義,用來實現24微步的控制
/* the microstep stage of motor moving */
#define LEVEL6 218
#define LEVEL5 211
#define LEVEL4 189
#define LEVEL3 139
#define LEVEL2 80
#define LEVEL1 41
#define LEVEL0 0
static const sint16 PWM1_WaveData[24]=
{LEVEL4,LEVEL3,LEVEL2, LEVEL1,LEVEL0, -LEVEL1, -LEVEL2,-LEVEL3, -LEVEL4, -LEVEL5, -LEVEL6, -LEVEL5, -LEVEL4, -LEVEL3, -LEVEL2,-LEVEL1, LEVEL0,LEVEL1, LEVEL2, LEVEL3, LEVEL4, LEVEL5,LEVEL6, LEVEL5};
static const sint16 PWM2_WaveData[24] =
{LEVEL4, ?LEVEL5, LEVEL6, LEVEL5, LEVEL4, LEVEL3,LEVEL2, LEVEL1, LEVEL0, -LEVEL1, -LEVEL2, -LEVEL3,-LEVEL4, -LEVEL5, -LEVEL6, -LEVEL5, -LEVEL4,-LEVEL3, -LEVEL2, -LEVEL1,LEVEL0, ?LEVEL1, ?LEVEL2, ?LEVEL3};
在邏輯控制中,我們會計算出微步的位置信息,然后調用微步位置的更新程序,利用上表中定義的參數更新寄存器,從而控制輸出波形。
4.2 ? 大回零變速曲線設計
電機指針角速度從0加速到最大值后,一般需要保持最高速度運行,整個行程超過表盤最大刻度,在最大速度運行到機械停止位后,電機發生堵轉停止。由于驅動速度超過電機啟停速度,電機指針堵轉后將不會回彈。加速過程數據如表4:
由此可見,電機指針的最大角速度為450度/秒,并高速撞向電機擋塊,指針回彈較小,噪聲較小,同時又遠遠大于啟停速度(該電機為190度/秒)。角加速度小于30000度/秒^2,滿足帶指針時的變速需求,不會導致電機失步。
5 ? ?步進電機驅動優化計算分析
基于以上理論分析,結合實際生產情況,實際使用以上驅動參數并不能有效地適應產線相關工位的工藝要求,主要體現為自動壓針工位出現指針壓入后脫離電氣零點,在指針指示矯正工位出現指針運行不平滑。針對以上問題,需要對微步電壓和大回零變速曲線進行深入分析和矯正,以滿足實際生產需求。
5.1 ? 微步電壓驅動優化計算
通過實際軟件仿真,我們可以直接測量出電機內部線圈24個微步中的每個電壓值,并與理論的電壓數據進行比較,實際測量和比對結果如表5:
由實際測量的數據可知,實際輸出的微步電壓值小于理論值,且電壓越大,微步電壓值差距越大。結合曲線分析,應該是儀表微控制器(MCU)的電機驅動外設存在內阻,根據歐母定理可知,電壓越大,線圈上的電流越大,單片機內阻產生的壓降隨即增大,所以要滿足理論值重合,必須要考慮單片機的內阻。如圖7所示:
由于電機線圈電阻R2為280歐姆,根據公式2,我們可以根據每個微步的理論與實際電壓差值計算出電機外設的內阻值R1。最終計算結果為14歐姆。
公式2 單片機電機外設內阻計算公式
將內阻代入后,我們重新調整單片機占空比寄存器的值,從而得到了與理論微步電壓值向匹配的測試結果。同時考慮到提高電機的驅動力,我們需要將表一中的最大電流PM調整為16.01mA。從而提高電機在空載運行中的驅動力和鎖緊力,最終結果如表6所示:
相應的程序參數更新為:
/* the microstep stage of motor moving */
#define LEVEL6 242
#define LEVEL5 234
#define LEVEL4 210
#define LEVEL3 152
#define LEVEL2 85
#define LEVEL1 44
#define LEVEL0 0
static const sint16 PWM1_WaveData[24]=
{LEVEL4,LEVEL3,LEVEL2, LEVEL1,LEVEL0, -LEVEL1, -LEVEL2,-LEVEL3, -LEVEL4, -LEVEL5, -LEVEL6, -LEVEL5, -LEVEL4, -LEVEL3, -LEVEL2,-LEVEL1, LEVEL0,LEVEL1, LEVEL2, LEVEL3, LEVEL4, LEVEL5,LEVEL6, LEVEL5};
static const sint16 PWM2_WaveData[24] =
{LEVEL4, ?LEVEL5, LEVEL6, LEVEL5, LEVEL4, LEVEL3,LEVEL2, LEVEL1, LEVEL0, -LEVEL1, -LEVEL2, -LEVEL3,-LEVEL4, -LEVEL5, -LEVEL6, -LEVEL5, -LEVEL4,-LEVEL3, -LEVEL2, -LEVEL1,LEVEL0, ?LEVEL1, ?LEVEL2, ?LEVEL3};
5.2 ? 大回零變速曲線優化計算
為了滿足產線空載回零的工藝要求,我們除了要調整微步電壓設置,同時還要對大回零變速曲線進行優化和調整,原有的變速曲線指針的最大角速度為450度/秒,角加速度小于30000度/秒^2。結合實際生產要求,需要將變速曲線的指針最大角速度降低為400度/秒,將角加速度調整到6000度/秒^2以下。如表7所示:
6 ? ?效果驗證
D320步進電機總成效果圖如圖8所示:
按照以上策略調整電機驅動參數,提高微步電壓值,消除單片機內阻產生的電壓差,同時降低指針的最大角速度和維持電機角加速度保持在5000-6000度/秒^2的范圍內,電機運行更加平穩。同時在空載狀態下,單機能從任意指示位置回到機械零點,并同時消除電機堵轉時的噪音和指針回彈現象,指示準確不丟步,完全滿足了自動化生產線的工藝要求,產品生產通過率接近100%。獲得工藝技術部的一致認可。該東風新天龍D320 儀表項目已經于2018年10月實現量產,且根據市場訂單,預計2019年實現銷售額1500萬元。
7 ? ?結束語
以上基于優化后的步進電機驅動功能,可靠、快速的響應了公司對東風商用車D320組合儀表的重點項目投產需求,為公司創造了良好的經濟效益的同事,該驅動優化算法可推廣移植應用于其他自動化生產線的儀表項目設計中去,以實現技術的持續增盈。
參考文獻:
[1] 朱玉龍. 汽車電子硬件設計[M]. 北京:北京航空航天大學出版社. 2011. 第1版.
[2] 譚浩強. C程序設計. 北京:清華大學出版社. 2005. 第3版.