無人機課程姿態解算教學難點突破
2020-12-23 04:19:54高國剛宋強閆景富姚彥博
教育教學論壇 2020年47期
高國剛 宋強 閆景富 姚彥博
[摘 要]在無人機課程教學中,姿態解算是教學重點之一。但由于基本概念多、數學推導繁復、內容枯燥、學生理解吃力,這使其教學變得非常困難。為使學生更好的學習和掌握無人機姿態解算和姿態變化過程,文章以自主開發的模擬仿真平臺為基礎,與數學教育軟件GeoGebra相配合,實現了算法可視化教學,有效地幫助學生理解了相關算法在實際工程中的物理意義,成功突破了這個難點。
[關鍵詞]無人機課程教學;姿態解算;算法可視化
[基金項目]2020年中國石油大學(北京)克拉瑪依校區教育教學改革項目“基于虛擬儀器的電工電子學實驗教學改革”(JG2020013);2017年新疆維吾爾自治區綜合教改項目“政校企協同育人機制下的機械專業創新創業人才培養新模式”(2017JG027);2017年教育部產學合作協同育人項目“虛擬儀器機電聯合實驗室建設”(201702008089)
[作者簡介]高國剛(1988—),男,甘肅酒泉人,碩士,中國石油大學(北京)克拉瑪依校區工學院實驗師,主要從事自動控制、無損檢測等研究。
[中圖分類號] G642[文獻標識碼] A[文章編號] 1674-9324(2020)47-0-03[收稿日期] 2020-08-15
一、引言
近年來,隨著無人機技術和產業的快速發展,以及我國對“新工科”“雙創”等政策的大力支持,各種電子設計大賽、創新創業項目中涉及無人機的課題越來越多,大學生對無人機的關注度也持續攀升[1-2]。為了更好地提高高校學生對前沿科技的了解,增強學生的創新能力和實際應用能力,一些高校已經針對無人機展開了項目式教學[3-6]。姿態解算是無人機教學中的重點內容,其中需要理解的知識點較多、理論推導和計算繁復,學生通過閱讀文獻較難理解飛行器的姿態變化和解算過程,因此在課堂講授中時常會出現教師難教、學生難學的現象。鑒于此,筆者結合自身教學實踐和科研經歷,以自主開發的無人機姿態解算模擬仿真平臺為基礎,對教學方法和手段進行了改革探索,目的是使學生能夠直觀的了解和學習相關算法,激發學生思考數學公式所表達的實際工程意義,培養學生的求知能力,進而突破教學難點,改善教學效果。
二、教學工具簡介
目前國內用于教學的無人機平臺不多,大疆等公司生產的無人機功能多,種類齊全,性能穩定,但代碼不開源,無法在教學中使用;以PX4、APM或STM32為核心開源飛控,采用C語言編程,結合Matlab/Simulink軟件平臺進行仿真驗證,入門起點較高,不利于初學快速更改控制算法和參數。
LabVIEW是一款用圖形化符號代替文本編程語言的虛擬儀器開發平臺,具有操作簡單,易于理解和掌握等特點。myRIO是NI公司針對教學和學生創新應用推出的嵌入式系統開發平臺,其作為可重復配置和使用的教學工具,具有以下特點:①編程簡單,代碼開源,易于上手使用;②板載資源豐富,硬件交互擴展能力強;③安全便捷,容易攜帶。利用LabVIEW和myRIO開發飛行器姿態解算仿真平臺,把相關算法集成到平臺中,軟件架構簡單易懂,計算結果實時可見。學生在熟悉相關算法后,可以利用平臺驗證不同參數對姿態解算結果的影響,進而加深對相關算法的理解。
教具由上位機和下位機組成。其中,慣性測量單元MPU6050模塊和myRIO-1900構成下位機,其任務是采集原始數據采集和計算飛行器姿態,計算結果通過用戶數據報協議通信(UDP,User Datagram Protocol)發送至上位機。上位機是一臺裝有LabVIEW軟件的PC機,其功能是實時顯示飛行器姿態數據和飛行器模型在3D場景中的位置。
另外,考慮到學生的數學基礎良莠不齊,可在教學中利用Geogebra軟件進行輔助教學。GeoGebra是一款集數值計算、符號計算、函數繪圖等功能的數學教育軟件,具有界面簡潔化、命令可視化等優點,能夠輕松實現函數表達式和圖像的同步變化,從而提升學生對知識點的理解能力。
三、教學內容概述及教學過程
無人機姿態解算內容廣泛、概念龐雜,但核心問題是要理解旋轉矩陣、歐拉角和四元數三種姿態表示的變化與機體角速度的關系。課程內容由淺入深,可分為3個部分:①基本概念;②坐標變換及其實現;③姿態解算與仿真。每部分內容都將以前續內容為基礎不斷增加難度,旨在培養學生對算法的理解能力。
(一)基本概念講解
在教學開始時,教師務必要把一些基本概念介紹清楚,否則學生容易在學習過程中感到理解困難,體會不到知識的實際作用。在講解基本概念時,應適當加以歸納整合,形成一個簡明的理論體系,可以從實際生活案例出發,增加學生的感性認識,并以此為基點開展相關概念講述[7]。教師需講述的基本概念如下:
右手定則:右手拇指指向X軸正方向,食指指向Y軸正方向,中指所指的方向即是Z軸正方向。要確定旋轉正方向,用右手的大拇指指向軸的正方向,彎曲四指,則四指的指向即是旋轉正方向。
慣性坐標系(i系):原點位于地球中心,坐標軸相對于恒星無轉動,軸向定義為OXi,OYi,OZi。其中OZi的方向與地球極軸的方向一致。
載體坐標系(b系):它是一個與特定物體相關聯的獨立正交坐標系,并隨物體姿態的變化而改變。為了便于理解和計算,在選擇坐標系時,教師可以引導學生將i系和b系的坐標軸方向保持一致。
歐拉角:假定載體的初始狀態為標準方位,即b系與i系重合,某一時刻載體相對于參考坐標系的姿態,可以通過繞不同坐標的3次連續轉動來確定。因此,從i系到b系的轉換關系可表示為:繞Z軸轉動ψ角;繞新坐標系的Y軸轉動θ角;繞新坐標系的X軸轉動φ角。
(二)坐標變換教學
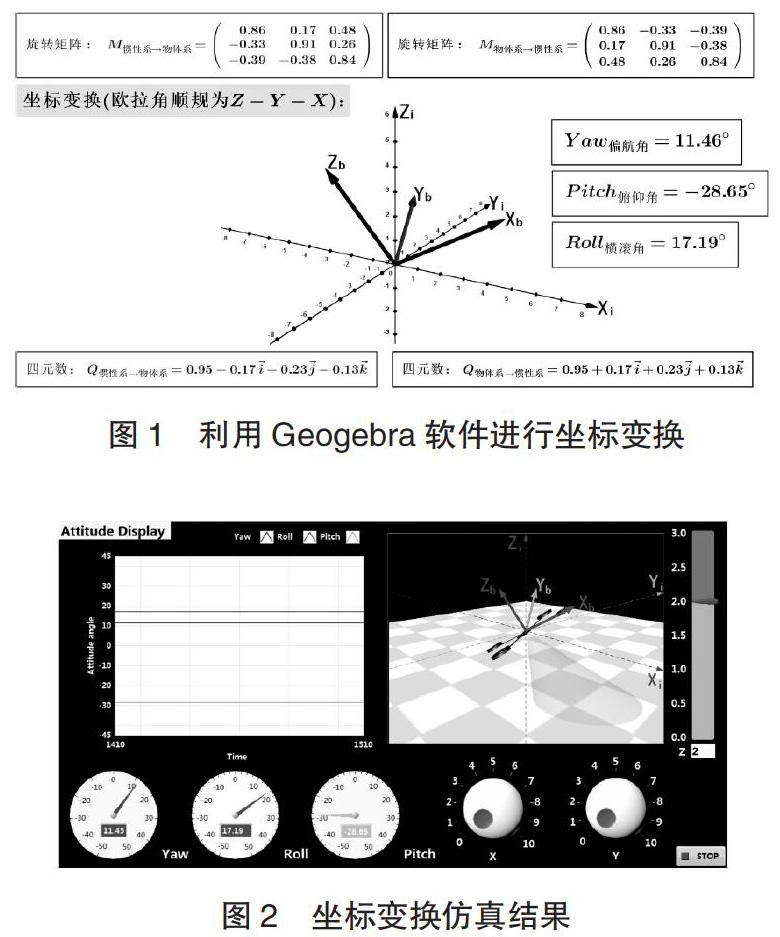
坐標變換的講解可先從簡單的2D環境中物體繞原點的旋轉講起,循序漸進過度至3D環境中,使學生了解在不同環境中進行坐標變換的邏輯性關系。在3D空間中,要確定或描述一個物體的方位至少需要三個數,描述物體坐標方位的常用方法有三種:①方向余弦矩陣;②歐拉角;③四元數。三種表示法能夠相互轉換,以Z-Y-X旋轉順規為例,當物體系相對于慣性系發生姿態變化時,歐拉角與旋轉矩陣、歐拉角與四元數的關系如文獻[8]所述。方向余弦矩陣反映了b系相對于i系的映射關系,實際物理意義是:若方向余弦矩陣已知,那么通過該矩陣便可找到b系相對于i系發生的姿態變化。
教師在授課時,可在Geogebra軟件中以列表的形式設置3個長度相等的方向向量表示b系,以便直觀的展示坐標變換過程。當姿態發生變化時,方向向量與旋轉矩陣相乘便可得到b系相對于i系變化后的姿態。圖1展示了當ψ=0.2rad、θ=-0.5rad、φ=0.3rad時的變換結果。當學生利用四元數進行坐標變換時,需提醒其注意四元數運算與傳統運算的區別。
學生熟悉相關算法后,即可用LabVIEW編寫坐標變換算法,并在上位機程序中將3個表盤設置為輸入控件。程序運行后,調節相應表盤指針便可動態查看飛行器坐標變換過程。圖2展示了當歐拉角分別設置為11.46°,-28.65°和17.19°時,飛行器坐標變化結果,對比Geogebra變換結果即可驗證算法的正確性。同理,也可學習和驗證其他順規的坐標轉換算法。
在講解坐標變換時,教師可同時展示出方向余弦矩陣、歐拉角和四元數法的變換結果,引導學生發現三種姿態表示方法的優劣:方向余弦矩陣的缺點是因數據冗余導致的計算效率降低;歐拉角法在處理坐標變換問題時有可能導致萬向鎖。因此,選用四元數法表達物體姿態,既能減小計算量,提高姿態解算效率,又能保證姿態解算精度。
(三)姿態解算教學
姿態解算涉及四元數微分方程的求解和誤差補償控制,授課可采用“程序填空”的方式進行。四元數中包含了物體的姿態信息,物體姿態的改變即為四元數的改變,實時的姿態計算需要實時更新四元數。因此,需要構建四元數關于時間的微分方程[9]來研究四元數的變化規律,并利用四階龍格—庫塔法求解微分方程[10]。在誤差補償控制方面,可通過構建PI控制器來控制誤差補償的大小和精度,其基本思想是:利用i系標準重力加速度可算得b系的理論重力加速度,飛行器的實際重力加速度可通過傳感器測得,此二者間必然存在誤差夾角β,根據向量叉乘運算法則可算出β的正弦值。由于β的變化范圍較小,故可將β近似為理論值與實際值之間的誤差。在PI控制器中,調節比例項可消除靜態誤差,利用積分項可控制傳感器的“可信度”,計算結果即為誤差補償值δ。通過δ修正陀螺儀的測量值,并用修正結果求解四元數微分方程便可得到相對準確的姿態。
使用LabVIEW開發的無人機姿態解算模擬仿真平臺,在求解四元數微分方程和誤差補償控制時都使用了MathScript節點,這樣做不僅提升了算法的執行效率,而且在教學中方便教師向學生提供程序框架,學生可以基于所學知識對程序進行補充完善,并隨即得到驗證。這種“程序填空”的學習形式不但可以減輕學生負擔,獲得最佳學習效果,而且還留有充分發揮和改進的空間。
四、教學效果分析
上述教學內容的授課對象是2017級的97名學生,經過教學實踐,教學效果得到明顯好轉。筆者在課程結束后對教學效果進行了問卷調查,調查內容包含5個方面:對教學效果的滿意程度、對課程內容的掌握程度、教師知識點講解清晰程度、教學手段優化程度以及教師對課程的準備程度。調查結果分為優秀、良好、一般、較差和很差5個等級。調查結果顯示,教師利用自主開發的教學工具能夠較清晰地描述課程中的相關算法,使抽象的算法得到更直觀的表達,突破了教師難教、學生難學的教學難點,加深了學生對教學內容的理解,對改善教學效果起到了促進作用。
五、結語
利用模擬仿真平臺,配合GeoGebra軟件進行算法可視化教學,可以引導學生逐步了解算法背后的物理意義,把學生從繁雜的數學公式中解脫出來,使枯燥的理論變得有趣。循序漸進的教學過程有助于完善學生的知識體系,提升學生的學習主動性以及對理論知識的理解能力。“填空”式的算法實現使學生在輕松愉快的氛圍下突破了學習難點,情感體驗得到升華。良好的教學效果使教師在傳道授業的過程中,充分體會到了自身工作的價值與意義。
參考文獻
[1]曹煦,馮士恩.無人機技術應用現狀和發展趨勢研究[J].計算機產品與流通,2020(07):107.
[2]周子棟,陳至坤,趙志佳.四旋翼無人機飛控算法綜述[J].網絡安全技術與應用,2019(09):33-36.
[3]溫凱,陳繆.全尺寸四旋翼無人機教學平臺設計與課程開發[J].實驗技術與管理,2018,35(09):100-103.
[4]王剛,陳龍,薛遠奎,等.四旋翼無人機控制理論與設計課程實踐教學[J].實驗科學與技術,2018,16(02):74-77.
[5]郁劍,張秋浩,鎮毅.基于四旋翼無人機的課程實踐教學[J].科技視界,2020(05):85-86.
[6]曾舒婷,夏慶鋒.高等學校無人機課程的跨學科教學研究[J].電腦知識與技術,2018,14(29):168-169.
[7]陳立鋼,牛娜,孫明禮,等.高等院校工科專業分析化學教學改革與實踐[J].化工高等教育,2019,36(02):76-79+99.
[8]秦永元.慣性導航[M].第2版.北京:科學出版社,2014: 4-7.
[9]盛廣潤,高國偉,張伯源.基于四元數的四旋翼飛行器姿態解算研究[J].現代電子技術,2020,43(14):8-12+16.
[10]史凱,劉馬寶.捷聯慣導四元數的四階龍格庫塔姿態算法[J].探測與控制學報,2019,41(03):61-65.
Abstract: In the UVA Course teaching, posture calculation is one of the key teaching points. However, due to the many basic concepts, complicated mathematical derivation, boring content, and difficult to understand for students, the teaching of the course becomes very difficult. In order to help students to better learn and master the UAV posture calculation and change process, based on the self-developed simulation platform and in combination with the mathematical software GeoGebra, this paper realizes the algorithm visualization teaching, which effectively helps students understand the physical significance of relevant algorithms in practical engineering, and successfully breaks through this difficulty.
Key words: UAV Course teaching; posture calculation; algorithm visualization
