水中高速運動體內置測速渦輪裝置空化特性研究
2020-12-18 03:14:14丁文政
工程力學 2020年12期
陳 勇,丁文政,卞 榮
(南京工程學院,南京211167)
水中高速運動體可采用渦輪裝置作為測速、測距的方法[1]。在周圍流場速度、壓力達到空化條件,運動體特定位置將發生空化。周圍流場受到空化的影響發生改變,從而對渦輪的轉動產生影響。研究三維空間內的敏感機構的空化特性,對提升運動體的水中環境感知能力的提升具有重要意義[2]。
目前,對流場中空化現象的研究,在微觀層面,空化現象的產生與變化機理并未完全為人們所了解。在宏觀層面,空化現象在大多數情況下產生并發展于流場的劇烈變化的區域,對實驗測試條件要求苛刻,其產生的影響難以通過理論分析進行完整、具體地闡述[3?4]。盡管如此,近年出現了大量針對空化的實驗和仿真研究。其中,空化實驗對不同類型的空化形態、對應的流場壓力分布、特殊結構對空化的影響都做了非常詳細的研究[5?7];針對翼型葉片、圓盤空化器等空化的數值研究內容與實驗研究基本一致,研究方法目前已經發展到使用LES(大渦模擬)湍流模型進行分析,仿真結果已能夠展示流場空化的細微結構[8?10]。葉柵結構的非定常空化流場包含交變空化、存在遷移速度比的旋轉空化現象,體現了葉片間的相互作用對空化流動特性的影響,具有重要的意義[11]。對三維空間的流場結構來說,流場邊界對空化特性的影響機理更為復雜。例如,Guo等[12]通過優化渦輪葉片參數抑制空化的發生,取得了明顯的效果。該葉片參數在優化前后的變化非常細小。Zhao等[13]通過SBO優化方法和數值仿真模型對航空燃油泵內部整體流場的多個關鍵參數的微小調整。Lee等[14]通過對流場邊界結構的細微改變抑制空化的發生。可以看出,不管是單一葉片、葉柵,還是三維渦輪結構,關鍵部位的流場結構參數直接影響流場空化情況。
綜上所述,研究本測速裝置的防空化特性,對合理設計裝置機械結構、明確流場結構優化目標具有關鍵作用。經過驗證的仿真模型能夠彌補實驗研究的不足,對復雜環境下的渦輪特性分析提供支撐。因此,本文將基于數值仿真和實驗分析,研究水中高速運動體內置測速渦輪裝置周圍的空化流場,以獲取該渦輪裝置的空化特性。
1 渦輪裝置空化的產生環境
水中運動體周圍流場特點如圖1所示。運動體在水中高速運動時,渦輪受到水流的驅動而旋轉,如圖2所示,水流通過流道入口沖擊流道內的錐形渦輪使其發生轉動,錐形渦輪后側鑲有小磁體,霍爾器件通過探測錐形渦輪轉動過程中的磁場頻率變化獲取渦輪轉速。對水中的高速運動體來說,忽略水的自由流動,自身運動速度便是水流的相對運動速度,而該相對速度與渦輪轉速存在一定關系,從而實現運動體的自主測速。在運動體的實際高速運動中,來流方向跟測速裝置可能形成一定的偏差,通常情況下,該偏差不大且固定,形成的偏差角度為偏差角α。表1、表2及圖3為渦輪裝置的參數取值和示意圖。
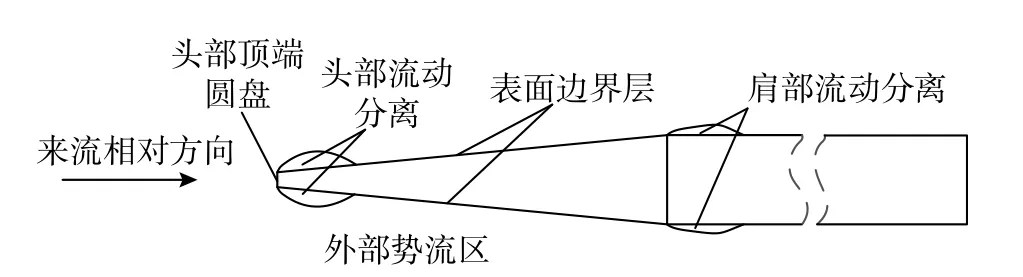
圖1 水下運動體周圍流場特點Fig.1 Flow field around underwater moving body
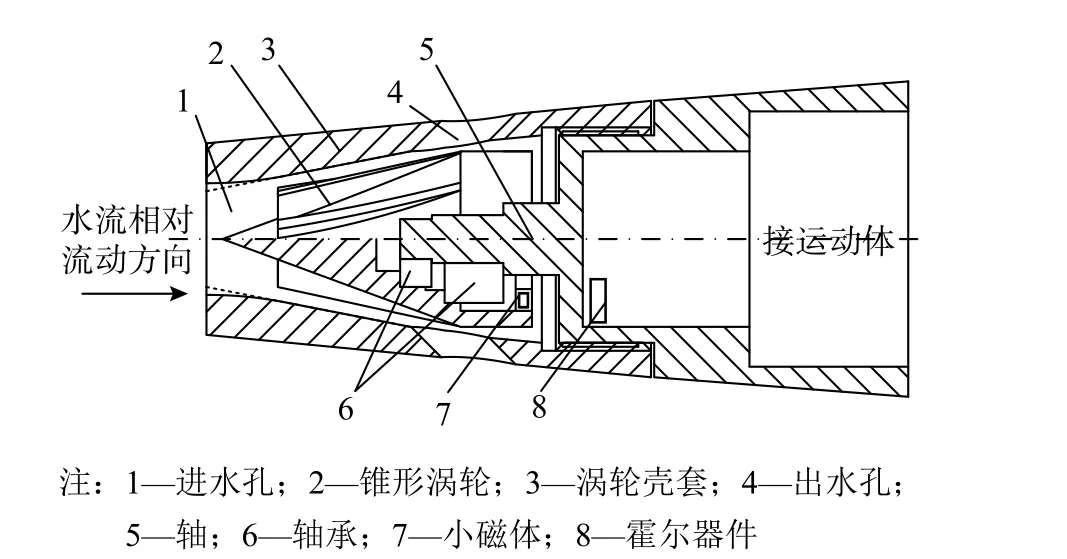
圖2 測速裝置原理示意圖Fig.2 Velocity measure unit principle schematic diagram

表1 渦輪葉片參數及取值Table 1 Turbine parametersand values(blade)

表2 渦輪輪轂與內流道參數及取值Table 2 Turbine parameters and values(hub and flow channel)
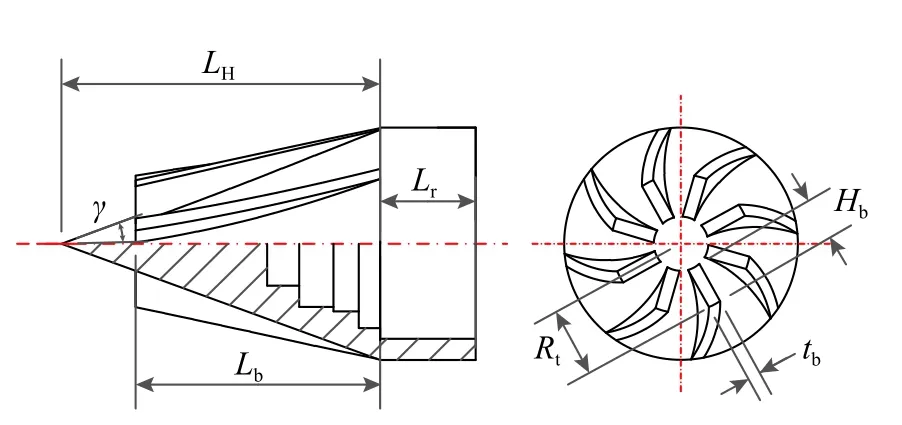
圖3 渦輪參數示意圖Fig.3 Turbine parametersillustration
2 數值仿真方法
2.1 空化流場網格劃分
從實現繞流場計算域中運動的角度出發,首先采用一個圓臺體封閉渦輪(交界面1以內,內部旋轉區域),以完成渦輪的轉動,然后再采用一個圓柱體將測量模型封閉(交界面2以內,外部流場區域1),以完成運動體偏轉運動。網格劃分如圖4所示。同時,為滿足流場對網格質量要求,使網格劃分能夠適應渦輪裝置的復雜外形,以提高其通用性和實用性,將包裹渦輪的圓臺區域(交界面1以內)和包裹流道外殼的圓柱體區域(交界面2以內)采用適應性較強的非結構網格進行劃分,并局部加密。

圖4 流場計算區域Fig.4 Flow field computational domain
通過采用邊界層與尺寸函數控制網格的疏密布置,對邊界層網格加密和相應調整。渦輪轉動區域部分的渦輪頭部在軸向方向上,近壁面在垂直于壁面的高度方向上進行網格加密,其他區域網格相對稀疏。為控制計算量,在保證網格質量的同時須控制網格總數。按照網格無關性實驗要求,設置3組網格進行分析,對比3個網格算例得到的渦輪葉片總力矩系數,通過網格收斂指數判斷,3種網格無顯著性差異。完成后的渦輪表面邊界網格劃分如圖5所示,網格總數為77萬。
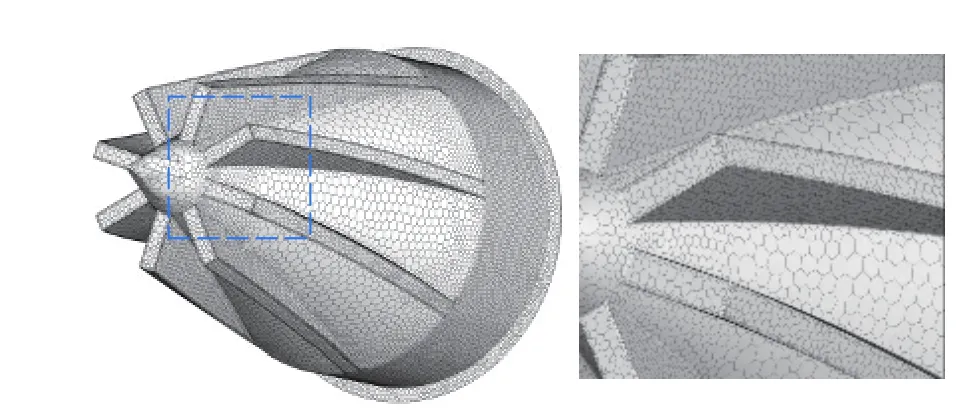
圖5 渦輪表面邊界網格劃分Fig.5 The turbinesurface boundary meshing
2.2 空化模型與求解算法
空化流是含有氣相、液相和蒸汽相,并伴有相變發生的流體。多相流體的模擬需要合適的多相流數值模型,而相間質量傳輸需要建立合適的空化模型。在本文中采用混合相模型(Mixture)和相應的空化模型來實現空化的模擬。
Singhal空化模型是考慮了湍流和不凝結氣體的影響,在氣泡動力學Rayleigh-Plesset 方程、氣液兩相質量守恒方程和相關物理假設的基礎上推導而來的。本文采用在Singhal 空化模型基礎上進一步發展起來的Schnerr 和Sauer 空化模型[15],最終的模型形式如式(1)、式(2)所示:
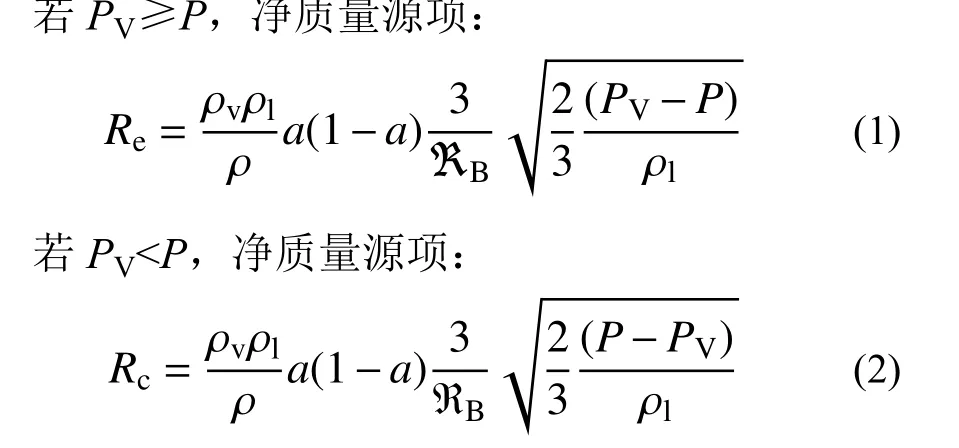
式中:P為各處壓力;ρ為各相密度;α 體積分數;R為質量傳輸率; RB為氣泡半徑。
模型的求解在FLUENT 求解器中進行,其求解壓力-速度耦合方程的基本算法是SIMPLE (Semiimplicit method for pressure linked equations)算法。SIMPLE 算法需要預定義流場壓力,本文中默認初始壓力值設為100 kPa(出口壓力、表壓)。湍流模型采用Realizable k-ε 模型,近壁處理采用標準壁面函數。湍流強度設為0.5%,湍流粘性比設為5。單元中心的變量梯度基于單元體的最小二乘法插值(Least Squares Cell Based 方法)。對流項的插值采用QUICK 格式。此格式適用于本六面體網格,對旋轉流動有用,在均勻網格上能達到三階精度。
3 實驗設備和方法
3.1 實驗樣機和實驗設備
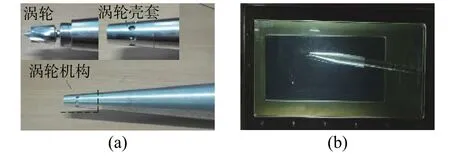
圖6 原理樣機及其安裝在水洞中Fig.6 Prototypeand installation in thewater tunnel
本實驗在一閉式空化水洞中進行。設計兩套原理樣機:一套為含有渦輪裝置的樣機;另一套為相同外形尺寸無渦輪裝置的對比樣機。如圖6(a)所示。將原理樣機通過支桿安裝在水洞實驗段,如圖6(b)所示。水洞試驗段為0.6 m×0.6 m正方形截面,含有四個方向的透明玻璃觀察窗,總長為2.5 m。水洞最大水流速度為12 m/s,空化數最低可達0.2,試驗段湍流度1.4%和相對含氣量在0.39~0.41范圍。轉速脈沖信號線從尾部支桿中穿出。
3.2 空化圖像的獲取與處理
為了方便分析大量空化圖片的周期性變化規律,設計了基于SSIM算法的圖像信息提取。該算法用均值作為亮度的估計,標準差作為對比度的估計,協方差作為結構相似程度的度量[16]:
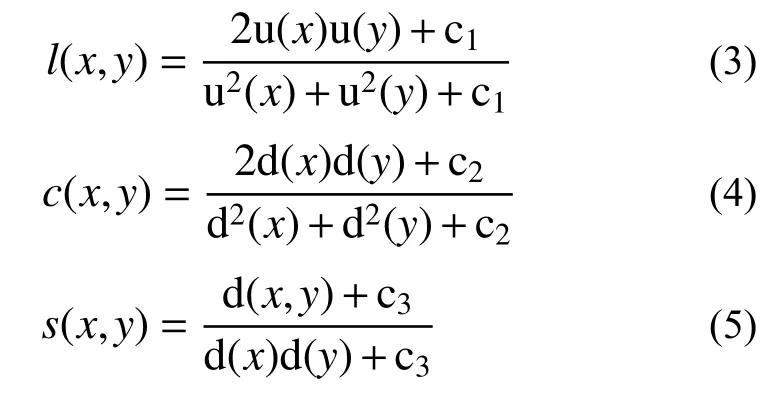
式中:l(x,y)為亮度比較函數;c(x,y)為對比度比較函數;s(x,y)為結構比較函數;u(x)u(y)為圖像的灰度均值;d(x)d(y)為圖像的灰度方差;d(x,y)為圖像的灰度協方差。引入常量c1、c2、c3是為了避免當分母十分接近零時出現的不穩定性,本文取各值均為0.01。則綜合上述因素的圖像指標可寫為:

利用編程軟件對空化圖像進行批量處理。取α、β 為小量0.1,γ 仍取值1。
4 結果和討論
4.1 空化區分布
從頭部外置渦輪的空化情況(表3所示)可以看出,位于頭部的流動分離區空化是導致外置渦輪轉動失效的根本原因。與前期研究的外置渦輪裝置相比[1?2],對處于內流場的內置渦輪機構來說,可以有效避免頭部的流動分離,從而減小空化對渦輪轉動的影響。
分別對有、無偏角,不同空化數下的內置渦輪結構進行空化水洞實驗和仿真研究,得到了表3~表5中不同工況下的空化圖像。從表中可以看出,在一些空化數下,頭部分離區、出水孔分離區均出現了空化。對比無渦輪裝置相同工況(表3)根據各工況下的空化結果,頭部開孔的渦輪測速裝置具有如下空化特性,對空化區域的形成產生了如下影響:
1)相比之下,頭部空化區域明顯變短,但初生空化數基本一致。
2)在空化數為1.0~0.6的范圍內,空化區域并未達到出水孔,頭部流動分離區產生的空化并未對出水孔產生直接的影響。
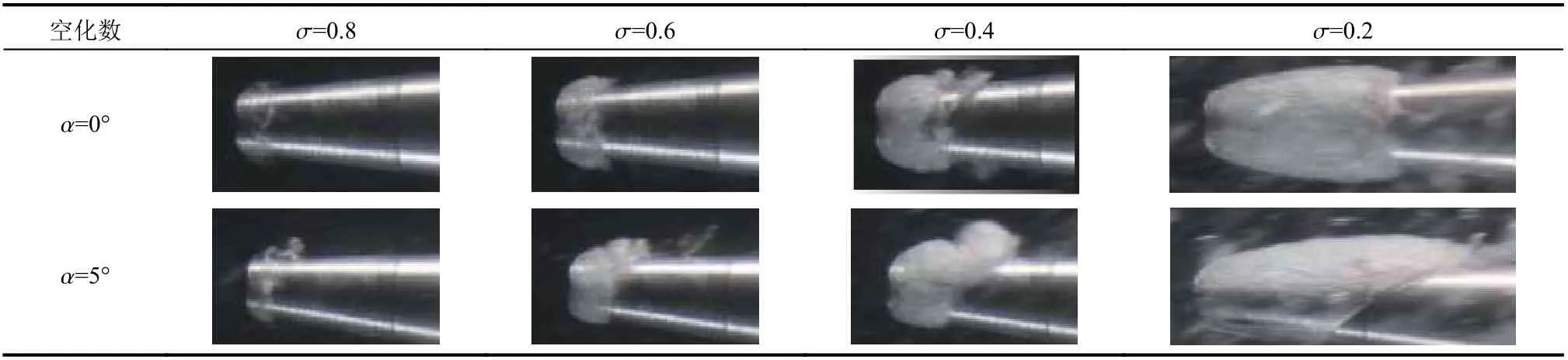
表3 無渦輪裝置樣機頭部空化(10 m/s)Table 3 Head cavitation of prototype without turbine (10 m/s)
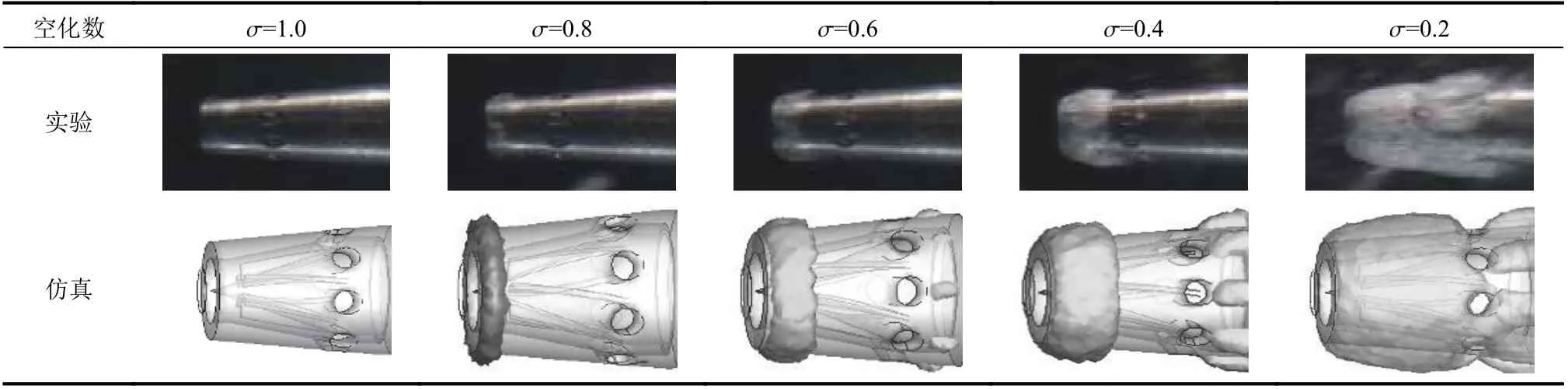
表4 渦輪裝置空化(10 m/s,α=0°)Table 4 Cavitation of the turbinedevice (10 m/s,α=0°)
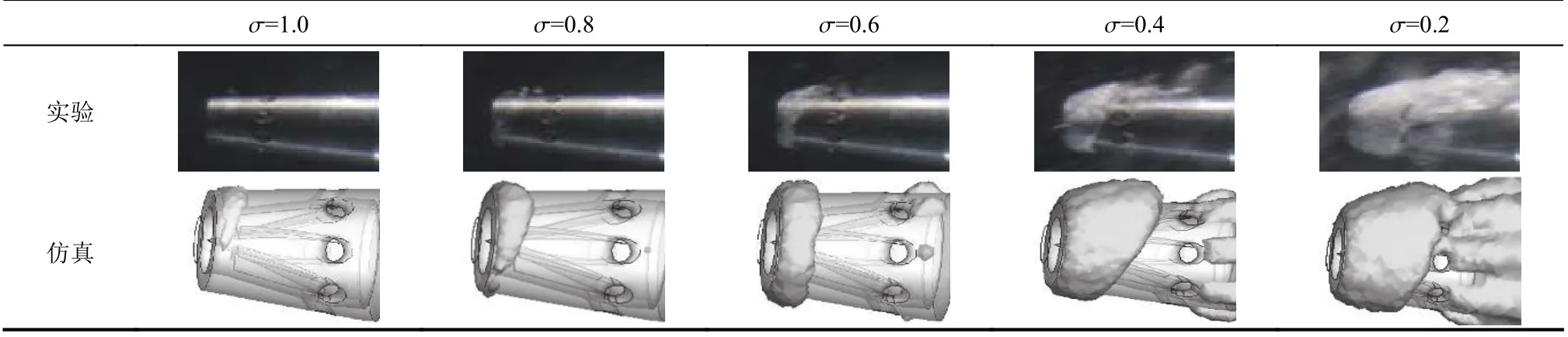
表5 渦輪裝置空化(10 m/s,α=5°)Table 5 Cavitation of the turbine device (10 m/s,α=5°)
3)在空化數降至0.8時,出水孔外的分離區明顯出現了空化。在空化數降至0.4或更低的時候,頭部分離區產生的空化尾部達到出水孔位置。
4)在空化數達到0.2的時候,外部分離的空化區已完全包括了出水口,出水孔外的分離區也產生了強烈的空化,已很難觀察到出水孔之間以及出水孔與空化區之間的縫隙。
5)該渦輪裝置改變了原有的空化形態。通當σ=0.4 時,原本在背流面的空化結構受到了出水孔水流的影響,改變了頭部空化的末端。當σ=0.2時,渦輪裝置的頭部分離區空化與出水孔分離區空化連為一體,在前端形成了固定的空化區域。
4.2 空化區動態特性
圖7和圖8為渦輪裝置外部瞬態空化情況。與無渦輪裝置相同工況(10 m/s,σ=0.4)進行對比可以發現,在該空化數下,出水通道已經對運動體頭部表面的空化區域產生了影響,改變了原有空化的周期性變化和形態。出水口的空化情況隨時間發生變化,這是由于不同時刻渦輪與殼體之間的流道受到葉片位置的影響,即出水流道和出水孔之間存在動靜干擾,最終造成了出水孔在不同時刻的流速存在周期性變化,從而對出水孔分離區內的空化情況產生影響。
表6為σ=0.4時,基于SSIM算法獲得的空化形態變化周期,可以看出,有渦輪裝置樣機的動態空化特性發生了明顯變化,云狀空化團脫落明顯加快。對比α=0°和α=5°下的渦輪裝置動態空化情況發現,有偏角情況下空化周期更長,云狀脫落范圍也更大。
4.3 臨界空化數
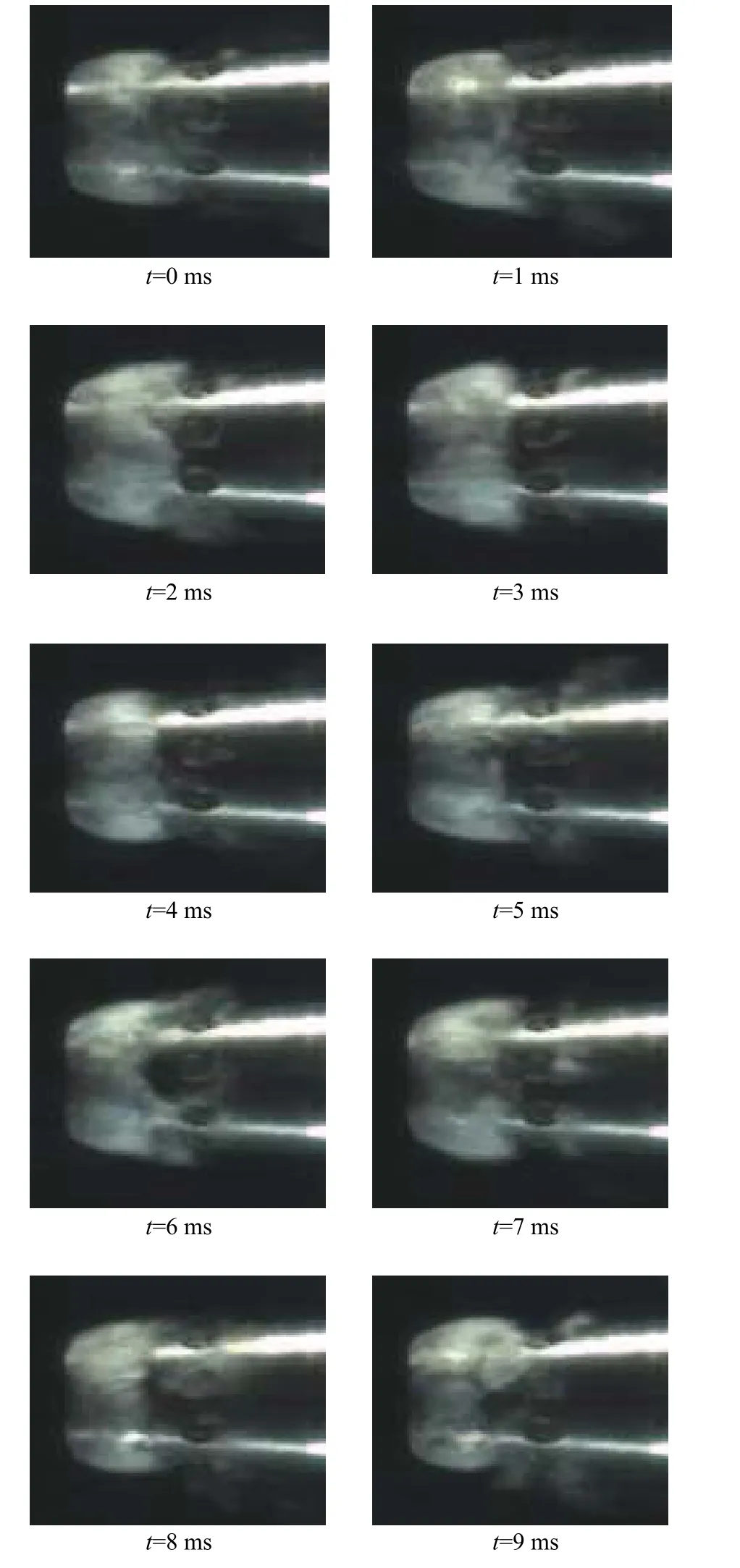
圖7 渦輪裝置外部瞬態空化(α=0°,10 m/s,σ=0.4)Fig.7 Transient cavitation of turbine device(α=0°,10 m/s,σ=0.4)
圖8 渦輪裝置外部瞬態空化(α=5°,10 m/s,σ=0.4)Fig.8 Transient cavitation of turbine device(α=5°,10 m/s,σ=0.4)

表6 空化脫落的平均周期(σ=0.4)Table 6 Turine parameters and values the turbine(σ=0.4)
隨著空化數的降低,渦輪最終會發生嚴重空化喪失升力而逐漸停轉。不過,這種情況是在空化非常嚴重的時候才會出現。對本渦輪裝置來說,實驗得到的初生空化數為0.9~1.1。但是,只有空化數降低到0.2時,傳感器性能才會有較明顯的變化,所以,存在相當大的空化數范圍,在該范圍內雖然部分空化一直存在但性能基本沒有變化。根據水輪機臨界空化的概念,效率出現一定量的下降的空化數即為臨界空化數。參考上述概念,本文定義在水洞減壓實驗時,渦輪轉速出現降低時的空化數作為渦輪裝置的臨界空化數σCr。
圖9為水洞實驗得到的內置渦輪樣機在不同空化數下的轉速變化。可以看出在空化數低于0.4后渦輪轉速升高,可以推測葉片開始出現空化。并可以進一步推測,在空化繼續發展后,內流道或渦輪葉片將產生較強空化并引起渦輪失效。對比α=0°和α=5°下的渦輪轉速,可以看出,與α=0°下的渦輪轉速相比,在未發生空化時,α=5°下的渦輪轉速偏高,而在發生空化后,α=5°下的渦輪轉速偏低。空化數為0.4時,渦輪轉速略有增加,但是仍然能夠保證一定的測速精度(經計算得到最大值與平均值的最大偏差為4.78%,滿足本裝置的使用要求),此時,外部的嚴重空化并未導致位于內部流道中渦輪轉動失效(即轉速降低并停轉),而傳統外置渦輪裝置在空化數低于1.0左右即進入失效狀態[1?2]。這進一步說明了相比傳統外置結構,內置渦輪機構具有一定抵抗空化的能力。
5 結論
本文利用流體仿真和空化水洞實驗研究了水中測速渦輪的空化特性,分析了其對渦輪轉動的影響。得到了如下結論:
(1)與無渦輪樣機相比,有渦輪樣機頭部空化形態改變,空化區域分為前后兩個部分,空化區域明顯加厚。空化數為0.4時,前端空化對后端產生影響,在空化數降低到0.2時,前后兩部分空化區域連成一體。同時,仿真結果能夠正確反映空化區域。
(2)與無渦輪樣機相比,有渦輪裝置樣機的動態空化特性發生了明顯變化,云狀空化團脫落明顯加快,云狀脫落范圍更小;有偏角相比無偏角情況下,空化變化周期更長,云狀脫落范圍也更大。
(3)實驗和仿真結果表明,外部嚴重空化并未導致位于內部流道中渦輪轉動失效,本渦輪裝置具有隔離外部空化的能力。在外界空化數高于臨界空化數(σCr=0.4)的情況下,渦輪測速裝置仍然在線性測量范圍內(最大誤差為4.78%),能夠保證渦輪裝置正常使用。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
光學精密工程(2016年6期)2016-11-07 09:07:19
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
核科學與工程(2015年4期)2015-09-26 11:59:03