六自由度機械臂的運動學分析與Matlab仿真
2020-12-14 04:35:10夏亞飛魏國春吝健全
軟件導刊 2020年9期
夏亞飛 魏國春 吝健全


摘 ?要: 本文以我公司6自由度機械臂為例,按照改進的D-H方法構建了6自由度機械臂工作運動的數學模型,對機械臂的正運動學、逆運動學進行分析。結合機械臂關節軸的典型幾何結構,正向運動學分析通過各關節的關節角度求取末端機構的位置和姿態,逆運動學則利用代數法推導出封閉解,并給出了機械臂正逆工作方程的數學函數公式和運算求解的過程。通過MATLAB軟件中的Robotics Toolbox,分別運算了機械臂的正、逆工作方程,進行了仿真實驗。結果表明,函數測算結果與公式推導的數值基本一致,證實了模型結構和預算方法的一致性,對同類機械臂的研究具有很大的借鑒和參考價值。
關鍵詞: 6自由度;機械臂;D-H;正運動學;逆運動學;MATLAB
中圖分類號: TP241 ???文獻標識碼: A ???DOI:10.3969/j.issn.1003-6970.2020.09.033
【Abstract】: In this paper, taking the 6-DOF manipulator of our company as an example, according to the improved D-H method, the mathematical model of the working motion of the 6-DOF manipulator is constructed, and the forward kinematics and inverse kinematics of the manipulator are analyzed. Combined with the typical geometric structure of the joint axis of the manipulator, the position and attitude of the end mechanism are obtained by the joint angle of each joint in the forward kinematics analysis, and the closed solution is derived by the algebraic method in the inverse kinematics, and the mathematical function formula of the forward and inverse working equations of the manipulator and the process of calculation and solution are given. Through the robotics toolbox in MATLAB software, the forward and reverse working equations of the manipulator are calculated, and the simulation experiment is carried out. The results show that the calculation results of the function are basically consistent with the values derived from the formula, which confirms the consistency of the model structure and budget method, and has great reference value for the research of the same kind of manipulator.
【Key words】: 6-DOF; Manipulator; D-H; Forward kinematics; Inverse kinematics; MATLAB
0 ?引言
機器人技術是一門綜合性的應用技術,涵蓋了機械、自動控制理論、機器視覺等諸多的科學領域。自20世紀90年代以來,隨著機器人制造成本降低和人工勞動力成本的不斷增加,機器人開始廣泛的應用于工業、醫療等領域,提高了產品的質量和效率,也是未來發展的必然趨勢,因此對機械臂關鍵技術的研究具有極其重要的科研意義[1-2]。機械臂是工業機器人中最重要的一種類型,由許多剛性連桿組成,連桿間由關節串聯[3-5]。運動學分析是機械臂控制的關鍵因素之一,直接影響到軌跡規劃和控制的精度。
機器人仿真技術在機械臂的設計和研究中具有重要意義。1955年Danevit[6]和Hartenberg基于D-H坐標變換的數學模型提出了一種相對位姿矩陣方法,但存在參數不易辨別、奇異點等問題。Stone[7]等人對該模型進行改進,克服了奇異點等問題。李艷[8]等人介紹了一種三自由度移動機器人動力學模型,其活動空間比較小。王立權[9]等人給出了6R型機械臂的運動學建模方法,研究分析了多解、漏解、增根等情況。
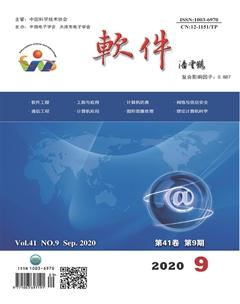
本文的研究對象是我公司智能分揀系統的六自由度KUKA機械臂,通過改進的D-H模型對其進行運動學分析和求解,并通過Matlab進行可視化仿真,為后續的機械臂軌跡規劃和控制系統設計奠定基礎。
1 ?機械臂結構參數
六自由度KUKA機械臂有6個旋轉關節,最大負荷210kg,最大作用范圍2700mm。通過分析機械臂各關節之間的相互關系,結合D-H約定方法,建立關節坐標系,推導齊次變換矩陣,計算出相關位姿參數,得到各關節坐標系之間的位置與姿態[10-12]。按照改進的D-H法建立機械臂坐標系,如圖1所示,連桿D-H參數如表1所示。
2 ?機械臂運動學正解
機械臂的正運動學求解是在己知機器人的各關節變量(i=1,2,3,…,6)的情況下,計算出機器人末端執行器的位置。對機械臂建立連桿坐標系后,通過矩陣運算可以導出相鄰連桿間坐標系變換的一般形式[13-17]。連桿的齊次變換矩陣為:
3 ?機械臂逆解
機械臂逆解是已知機器人末端相對于機器人基坐標系的位姿即,通過數學計算求解出各關節轉動的角度[18-21]。
5 ?結論
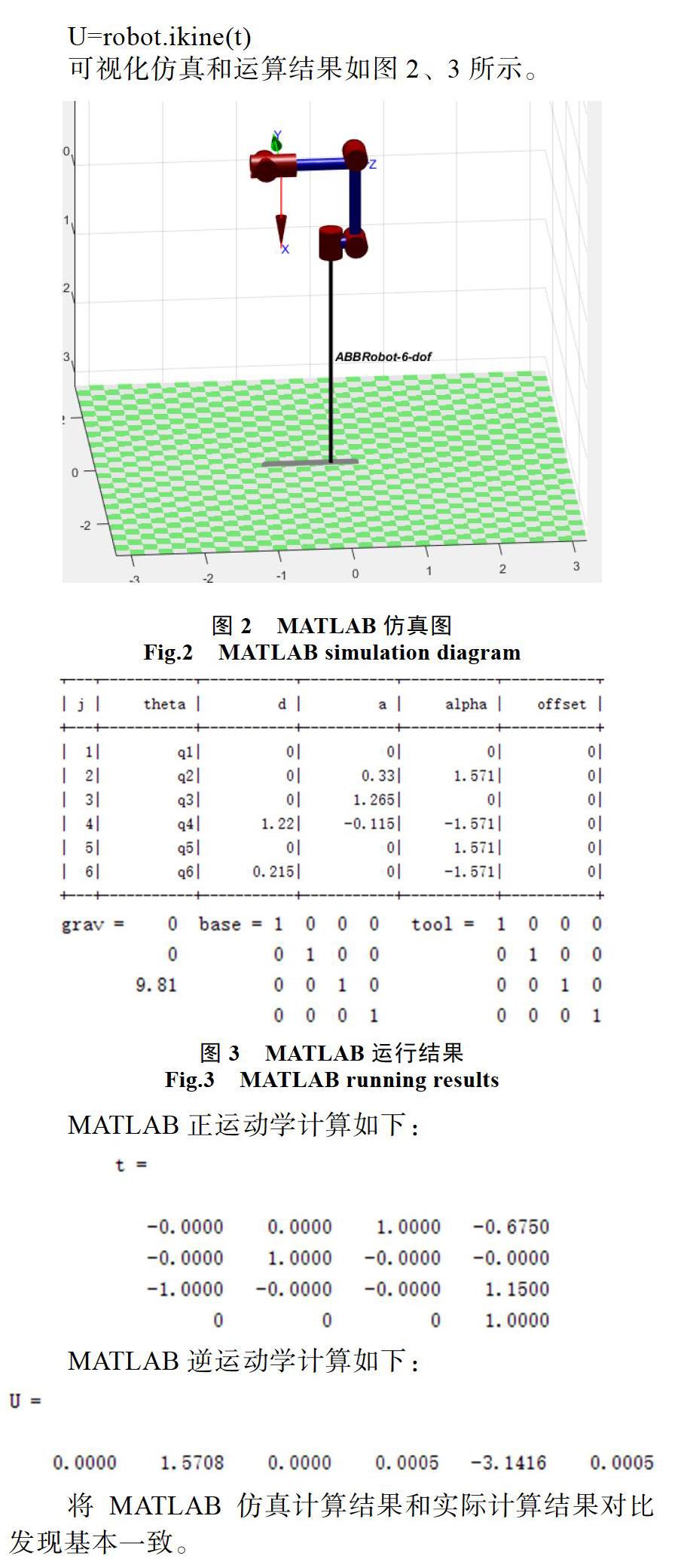
針對KUKA 6自由度機械臂,按照改進的D-H方法構建了運動的數學模型,并分析了正運動學、逆運動學,并給出了機械臂正逆工作方程的數學函數公式和運算求解的過程。通過MATLAB軟件中的RoboticsToolbox,分別仿真、計算了機械臂的正、逆工作方程。結果表明,測算結果與公式推導的數值基本一致,證實了模型結構和預算方法的一致性,對同類機械臂的研究具有很大的借鑒和參考價值。
參考文獻
[1]李珺茹, 齊立群, 韓文波. 六自由度機械臂運動學分析與軌跡優化[J]. 長春理工大學學報(自然科學版), 2019, 42(01): 68-73.
[2]李振雨, 王好臣, 王澤政. 工業機器人運動學分析和軌跡擬合研究[J]. 機床與液壓, 2018, 46(05): 25-28.
[3]韓亮亮, 葉平, 孫漢旭, 等. 基于QR分解的冗余度機械臂雅可比矩陣求逆方法[J]. 軟件, 2013, 34(11): 64-66+85.
[4]李瑞霞, 李粉霞, 楊潔明, 等. 基于D-H法的串聯機械手臂工作空間分析[J]. 機床與液壓, 2015, 43(21): 70-73+152.
[5]田海波, 馬宏偉, 魏娟. 串聯機器人機械臂工作空間與結構參數研究[J]. 農業機械學報, 2013, 44(04): 196-201.
[6]Denavit J, Hartenberg R. S. A kinematic notation for lower-pair mechanisms based on matrices. ASME Journal of Applied Mechanics, 1995, (5): 215-221.
[7]Stone H. W, Sanderson A. C. Statistical performance evaluation of the S-model arm signature identification technique. Proceedings of 1988 IEEE International Conference on Robotics and Automation, Washington: IEEE, 1988, 2: 939946.
[8]李艷, 林廷圻, 高峰. 一種3自由度移動機器人的動力學模型[J]. 機械科學與技術, 2004(04): 405-407.
[9]王立權, 劉秉昊, 吳健榮, 等. 6R關節型機器人運動學建模[J]. 智能系統學報, 2010, 5(02): 156-160.
[10]陸佳皓, 平雪良, 李朝陽. 基于MATLAB Robotic Toolbox的關節型機器人運動仿真研究[J]. 機床與液壓, 2017, 45(17): 60-62+81.
[11]周東輝. 七自由度機器人逆運動學研究[J]. 山東輕工業學院學報(自然科學版), 1995(04): 56-61.
[12]李鑫, 潘松峰, 尹寧寧, 等. 六自由度串聯機器人控制系統設計[J]. 青島大學學報(工程技術版), 2017, 32(02): 108-111.
[13]楊雄, 孔慶忠, 張海平. 五自由度關節型機器人結構設計及其動態仿真研究[J]. 機械設計與制造, 2009(08): 169-171.
[14]王海濱. 四自由度機器人機械系統的研究[D]. 哈爾濱工業大學, 2006.
[15]伍經紋, 徐世許, 王鵬, 等. 基于Adams的三自由度Delta機械手的運動學仿真分析[J]. 軟件, 2017, 38(06): 108-112.
[16]龐淑娟, 倪受東. 五自由度教學機器人的運動學分析及仿真[J]. 現代制造工程, 2007(06): 126-128.
[17]馮飛, 張洛平, 張波. 四自由度機器人Matlab仿真實例[J]. 河南科技大學學報(自然科學版), 2008(03): 24-26+108.
[18]印峰, 王耀南, 夏漢民. 多關節機器人逆運動學問題的實時求解[J]. 中國機械工程, 2010, 21(10): 1143-1148.
[19]汪明恒, 王允昌. 用于機器人逆運動學分析的幾何法及應用[J]. 機器人, 1989(03): 41-44.
[20]曾劍, 林義忠, 廖小平, 等. 6R型噴涂機器人運動學分析及仿真[J]. 機械設計與制造, 2010(06): 145-147.
[21]蔡勇, 劉宏昭. FANUC M-6iB關節型機器人運動學逆解研究及仿真[J]. 西安理工大學學報, 2009, 25(04): 420-424.
猜你喜歡
體育科技文獻通報(2022年3期)2022-05-23 13:46:54
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
當代工人(2020年8期)2020-05-25 09:07:38
科技傳播(2019年22期)2020-01-14 03:06:54
民用飛機設計與研究(2019年4期)2019-05-21 07:21:24
電子制作(2018年18期)2018-11-14 01:48:24
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
山東工業技術(2016年15期)2016-12-01 05:31:22
科技知識動漫(2016年8期)2016-07-29 20:40:09