磁鉸鏈約束下的微納聚合體衛(wèi)星柔順變構(gòu)控制
2020-12-14 11:45:14康國華劉奇弦吳佳奇
哈爾濱工業(yè)大學(xué)學(xué)報(bào) 2020年12期
康國華,劉奇弦,吳佳奇,王 強(qiáng)
(南京航空航天大學(xué) 航天學(xué)院,南京 210016)
微納聚合體衛(wèi)星是由多個(gè)立方體微納模塊通過磁力鉸鏈機(jī)構(gòu)相互吸附而形成的組合體航天器.磁力鉸鏈機(jī)構(gòu)分布于各模塊的12條棱上,微納模塊在磁力鉸鏈的約束下以棱為轉(zhuǎn)軸進(jìn)行轉(zhuǎn)動(dòng),從而實(shí)現(xiàn)微納聚合體衛(wèi)星的構(gòu)型重構(gòu).圖1為變構(gòu)過程的原理示意圖.
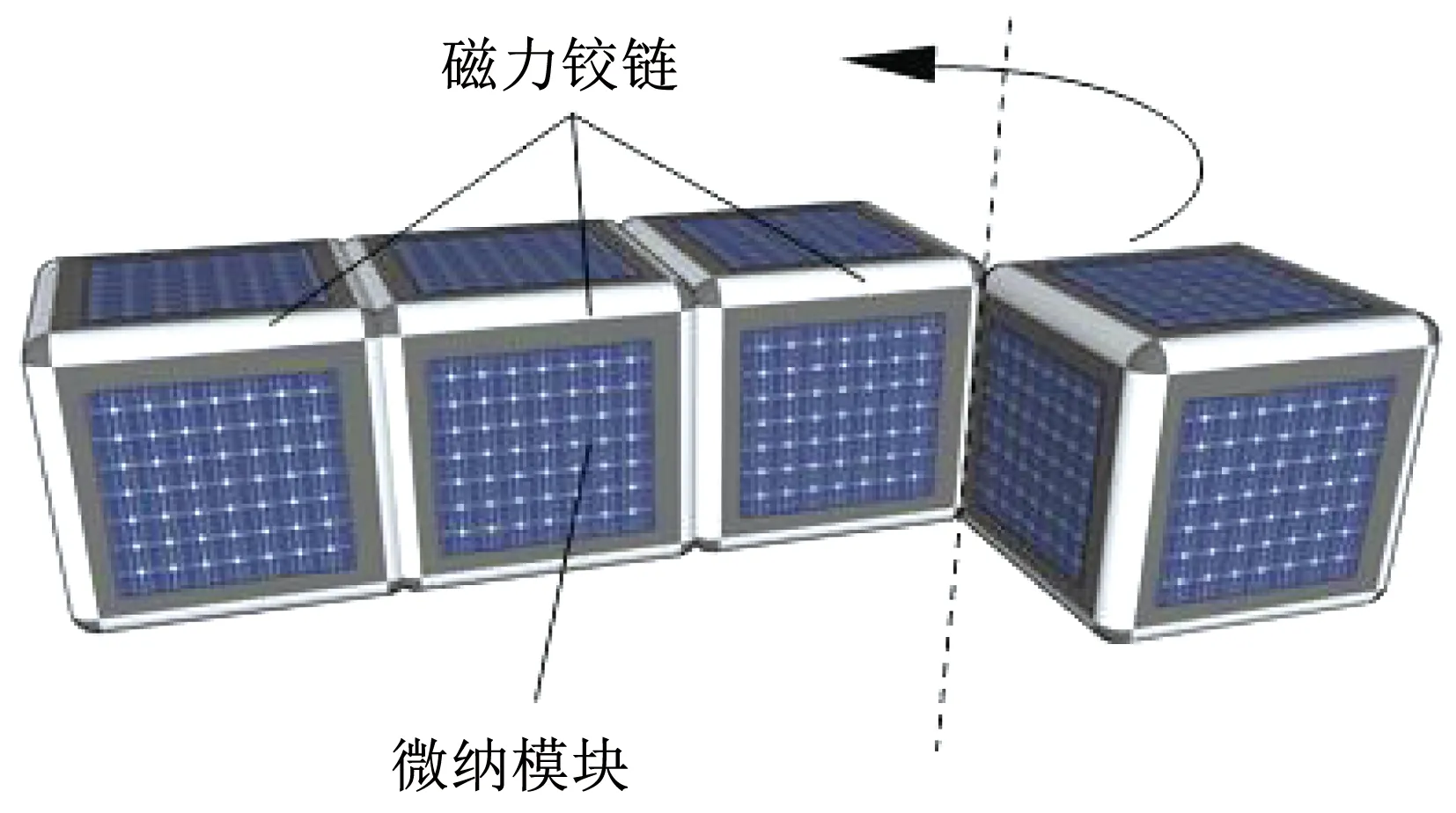
圖1 微納聚合體衛(wèi)星變構(gòu)原理
構(gòu)型可重構(gòu)的模塊化航天器由于具有較強(qiáng)的可擴(kuò)展性、適應(yīng)性,可滿足不同的任務(wù)需求,近年來引起了各國研究人員的關(guān)注.日本開展了板塊延展衛(wèi)星(panel extension satellite, PETSAT)計(jì)劃[1-2],但衛(wèi)星面板之間通過機(jī)械鉸鏈連接,連接方式在地面確定,無法在軌更改,因而無法實(shí)現(xiàn)任意形態(tài)的重構(gòu).英國薩里大學(xué)的可重構(gòu)太空望遠(yuǎn)鏡自主拼接(autonomous assembly of a reconfigurable space telescope, AAReST)項(xiàng)目,計(jì)劃通過多顆衛(wèi)星模塊的分離與再拼接實(shí)現(xiàn)不同望遠(yuǎn)鏡構(gòu)型之間的變換,以滿足不同的成像需求[3-4].但分離后再拼接的策略在控制上面臨姿軌耦合問題的挑戰(zhàn),姿軌耦合控制也會(huì)導(dǎo)致相對較多的燃料消耗.
磁力鉸鏈的示意圖如圖2所示,基于磁力鉸鏈的微納聚合體衛(wèi)星利用了鉸鏈約束的特性,可將微納模塊的轉(zhuǎn)動(dòng)轉(zhuǎn)化為位置的改變,磁力鉸鏈分布于微納模塊的12條棱上,通過電流的通斷決定鉸鏈的吸附與分離,這使得微納模塊可實(shí)現(xiàn)在3個(gè)方向的轉(zhuǎn)動(dòng).這意味著通過不同模塊的多次運(yùn)動(dòng)可實(shí)現(xiàn)任意兩構(gòu)型之間的變換.磁鉸鏈機(jī)構(gòu)在可重構(gòu)模塊化機(jī)器人領(lǐng)域已有成功應(yīng)用[5-6],在航天領(lǐng)域有較大潛在應(yīng)用價(jià)值.
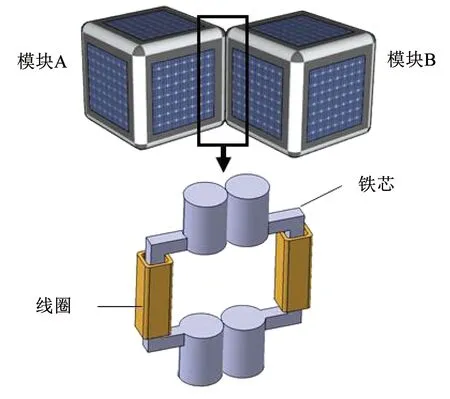
圖2 磁力鉸鏈?zhǔn)疽?/p>
在微納聚合體衛(wèi)星變構(gòu)過程中,運(yùn)動(dòng)中的模塊與組合體中其他部分構(gòu)成了一個(gè)漂浮基多剛體系統(tǒng),兩者在動(dòng)力學(xué)上是耦合的:當(dāng)某個(gè)模塊轉(zhuǎn)動(dòng)時(shí),由于角動(dòng)量守恒,其余剛體會(huì)發(fā)生與之方向相反的轉(zhuǎn)動(dòng),即某個(gè)剛體位置與姿態(tài)的變化會(huì)影響其他剛體的位置與姿態(tài),且磁鉸鏈處除約束內(nèi)力與力矩外,還有由磁力導(dǎo)致的主動(dòng)力與力矩作用于各剛體,對變構(gòu)過程造成干擾,這給變構(gòu)過程的柔順控制帶來了挑戰(zhàn).對于漂浮基多剛體系統(tǒng)的控制研究主要集中在空間漂浮基機(jī)械臂的控制、空間站艙段轉(zhuǎn)位控制等方面. 西北工業(yè)大學(xué)李磊等[7]針對空間站艙段轉(zhuǎn)位的場景,設(shè)計(jì)了全程滑模控制器,對核心艙、功能艙以及空間機(jī)械臂各關(guān)節(jié)都進(jìn)行了控制,實(shí)現(xiàn)了功能艙的轉(zhuǎn)位與核心艙的姿態(tài)穩(wěn)定.但任務(wù)需求與控制器特性決定了該控制方法除了對機(jī)械臂進(jìn)行控制外還需為核心艙提供控制力矩.吉林大學(xué)趙永佳[8]利用神經(jīng)網(wǎng)絡(luò)的方法對漂浮基空間機(jī)械臂進(jìn)行控制,該方法不需要精確的系統(tǒng)動(dòng)力學(xué)模型,在基座不受控的情況下實(shí)現(xiàn)了機(jī)械臂的軌跡跟蹤,但控制器設(shè)計(jì)較為復(fù)雜.
因此,本文采用一種量化因子在線調(diào)節(jié)的模糊控制器對微納聚合體衛(wèi)星變構(gòu)過程進(jìn)行控制,該方法不依賴于系統(tǒng)動(dòng)力學(xué)模型,只需對參與變構(gòu)的模塊進(jìn)行控制,且控制器的設(shè)計(jì)基于直觀的模糊規(guī)則,設(shè)計(jì)過程簡單明了.
1 動(dòng)力學(xué)模型
1.1 運(yùn)動(dòng)關(guān)系分析
微納聚合體衛(wèi)星變構(gòu)存在多種方式:串行變構(gòu)和并行變構(gòu),前者每次只有一個(gè)模塊參與變構(gòu)運(yùn)動(dòng),或者有多個(gè)模塊同時(shí)變構(gòu).本文主要研究串行變構(gòu)下的控制問題,因此,在每一次變構(gòu)過程中,整個(gè)組合體可看作一個(gè)兩剛體系統(tǒng),即由參與變構(gòu)運(yùn)動(dòng)的模塊(以下稱為運(yùn)動(dòng)模塊)與組合體中的其他部分(以下稱為本體)兩個(gè)剛體組成的系統(tǒng).
變構(gòu)時(shí),立方體運(yùn)動(dòng)模塊繞磁力鉸鏈做一個(gè)自由度的轉(zhuǎn)動(dòng),則在垂直于轉(zhuǎn)軸的平面上建立一個(gè)平動(dòng)坐標(biāo)系O-xy,坐標(biāo)系原點(diǎn)與系統(tǒng)總質(zhì)心C重合,坐標(biāo)軸可為平面內(nèi)任意方向;O1-x1y1與O2-x2y2分別為本體與運(yùn)動(dòng)模塊的本體系,與O-xy共面,原點(diǎn)分別與兩者質(zhì)心重合,坐標(biāo)軸分別平行于本體與模塊的邊線,如圖3所示.忽略重力梯度,在C點(diǎn),運(yùn)動(dòng)引起的慣性力與萬有引力平衡,則系統(tǒng)為不受外力的漂浮基多體系統(tǒng),O-xy可視為慣性基[9].
C2為運(yùn)動(dòng)模塊質(zhì)心,其到C的距離為l2,設(shè)運(yùn)動(dòng)模塊質(zhì)量為m2,繞慣性主軸(過質(zhì)心且垂直于O1-x2y2平面)轉(zhuǎn)動(dòng)的慣量為J2.本體可等效為一質(zhì)心為C1,質(zhì)量為m1,繞慣性主軸(過質(zhì)心且垂直于O1-x1y1平面)轉(zhuǎn)動(dòng)的慣量為J1的長方體剛體,C1到C的距離為l1.R1,R2分別為C1,C2到轉(zhuǎn)軸的距離.θ1為x1軸相對于x軸的逆時(shí)針夾角,θ2為x2軸相對于x1軸的逆時(shí)針夾角,即運(yùn)動(dòng)模塊相對于本體轉(zhuǎn)動(dòng)的角度.θ為連線C1C2與x軸的夾角,β為連線C1A與C1O的夾角.由于變構(gòu)全過程系統(tǒng)不受外力作用,則坐標(biāo)系O-xy始終可視為慣性系.
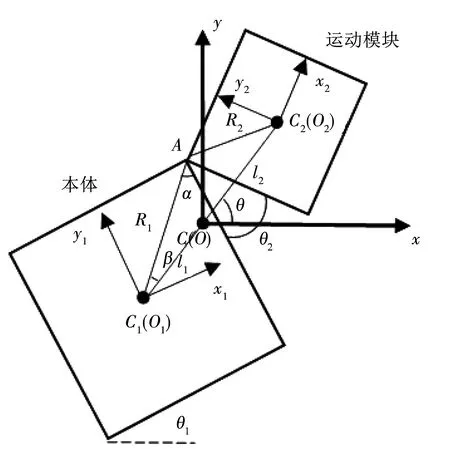
圖3 運(yùn)動(dòng)關(guān)系示意
由此可得到C1,C2位置關(guān)系為:
(1)
(2)
(3)
(4)
式中l(wèi),θ由下式所示的幾何關(guān)系確定:
(5)
(6)
(7)
1.2 磁力鉸鏈力學(xué)模型
磁力鉸鏈需要提供足夠大的磁力以保證變構(gòu)過程中模塊吸附于本體上,因此也會(huì)給運(yùn)動(dòng)模塊的轉(zhuǎn)動(dòng)帶來一定的阻礙,需要在動(dòng)力學(xué)建模和控制中將這一因素納入考慮.這一阻礙作用表現(xiàn)為一對磁力矩分別作用于運(yùn)動(dòng)模塊與本體上,如圖4所示.
該力矩是由磁力鉸鏈接觸面相互擠壓導(dǎo)致的形變產(chǎn)生的,與滾動(dòng)摩擦形成的機(jī)理類似,故套用摩擦力的建模方式對其建模.Mf1與Mf2大小相等,方向相反,該力矩的建模采用靜摩擦與庫倫摩擦模型的近似建模方法[10-12],將摩擦力矩在相對運(yùn)動(dòng)角速度零點(diǎn)的特性用具有一定斜率的直線線性表示,直線斜率由角速度界限D(zhuǎn)與最大靜摩擦力矩Mfs決定,Mfc為動(dòng)摩擦力矩,摩擦力矩與相對運(yùn)動(dòng)角速度的關(guān)系如圖5所示.
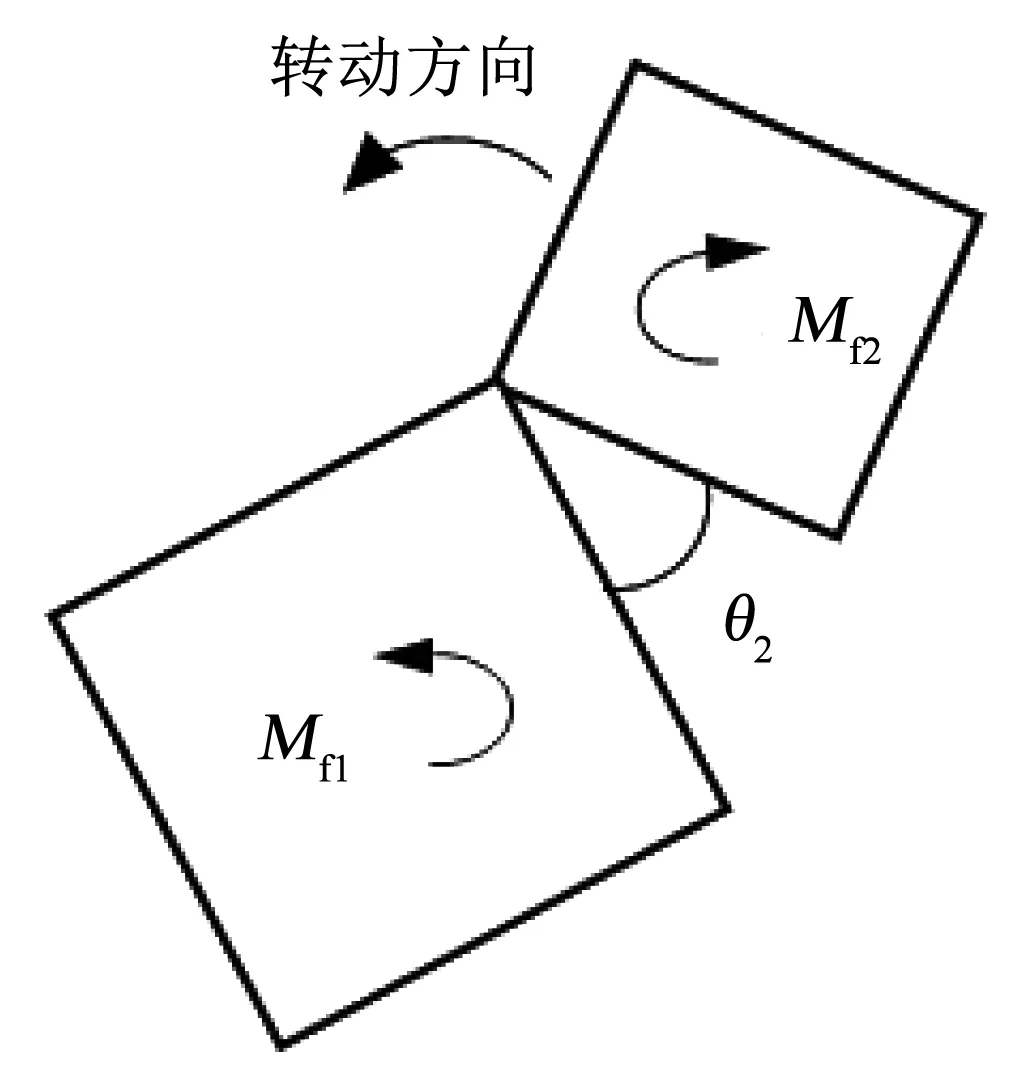
圖4 阻力矩示意
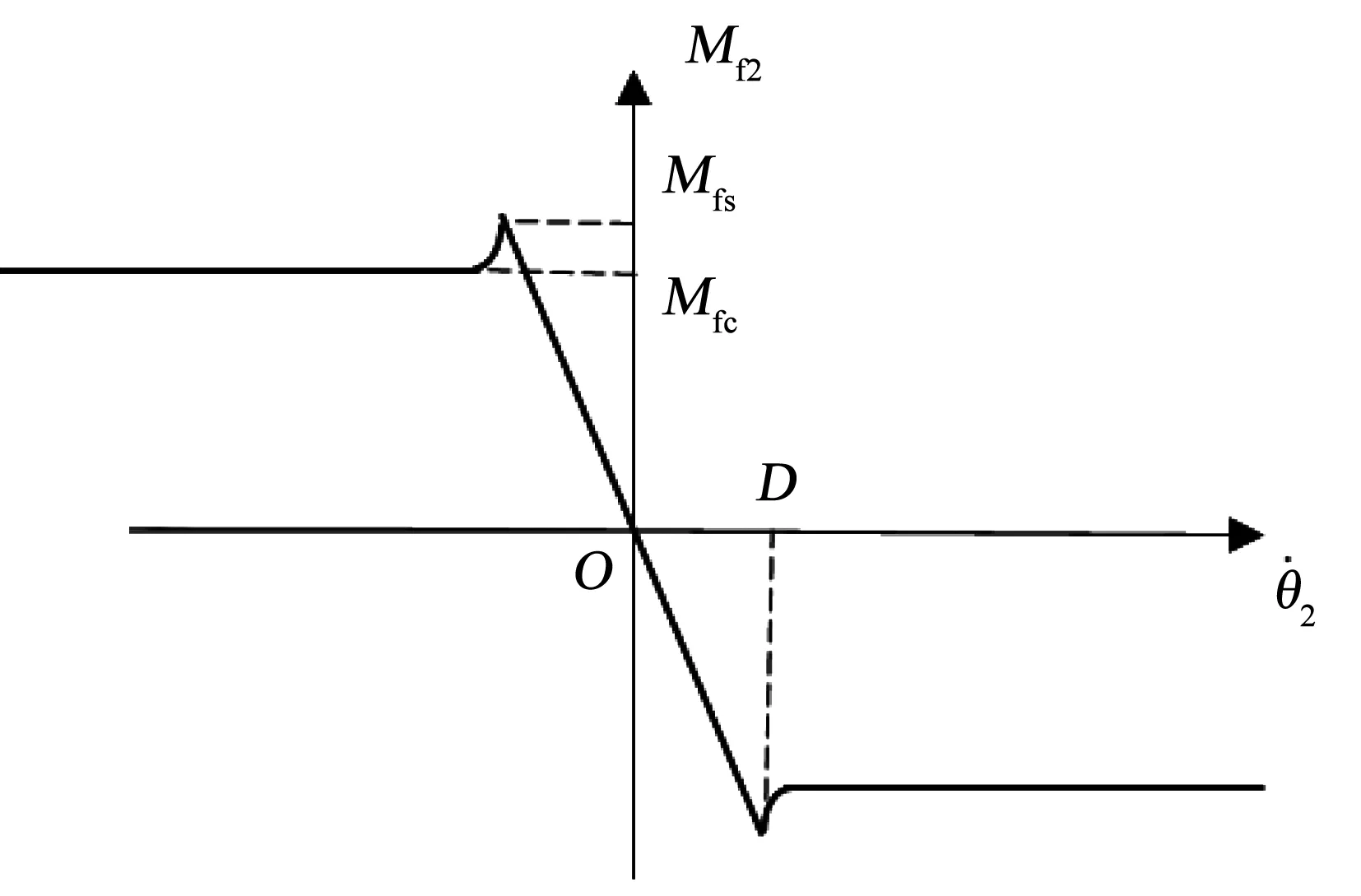
圖5 摩擦力矩與相對角速度的關(guān)系
1.3 系統(tǒng)動(dòng)力學(xué)方程
采用第2類拉格朗日方程對系統(tǒng)進(jìn)行動(dòng)力學(xué)建模,由式(1)~(7)可求得本體與運(yùn)動(dòng)模塊的質(zhì)心位置,微分可得到兩者質(zhì)心平動(dòng)速度v1與v2,則本體的動(dòng)能為
運(yùn)動(dòng)模塊的動(dòng)能為
忽略系統(tǒng)重力勢能的變化,利用下式拉格朗日方程:
L=E1+E2,
可得到如下形式的系統(tǒng)動(dòng)力學(xué)方程:
(8)
式中,q=[θ1,θ2]T,為廣義坐標(biāo);τ為控制力矩;Mf為鉸鏈摩擦力矩.
當(dāng)m1=m2=m,J1=J2=J,R1=R2=R,α=π/4時(shí),式(8)可簡化為下式:
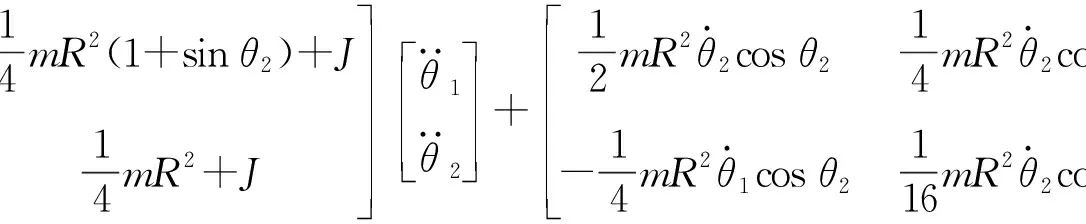
(9)
2 控制器設(shè)計(jì)
2.1 控制方法的選擇
由方程(9)可知,運(yùn)動(dòng)模塊與本體之間動(dòng)力學(xué)高度耦合,作用于運(yùn)動(dòng)模塊和本體上的力矩都會(huì)對兩者的姿態(tài)同時(shí)產(chǎn)生影響.因此,對于在設(shè)計(jì)過程中依賴于系統(tǒng)動(dòng)力學(xué)模型的控制方法來說,要想實(shí)現(xiàn)變構(gòu)過程的控制,需要同時(shí)對本體和模塊作用控制力矩,即兩者的動(dòng)量輪均需要工作.對于單純的變構(gòu)這一過程,對本體的姿態(tài)控制是不必要的,這會(huì)帶來更多的能量消耗,因此,需要一種不依賴于精確的系統(tǒng)動(dòng)力學(xué)模型,僅在運(yùn)動(dòng)模塊上作用一個(gè)控制力矩就可以完成變構(gòu)控制的方法,而模糊控制滿足該要求.
模糊控制利用模糊集合理論,模擬人的思維方式對被控對象進(jìn)行有效控制.因此,該控制方法不依賴于系統(tǒng)動(dòng)力學(xué)模型[13-14],只需獲取誤差與誤差變化率等信息,并可通過調(diào)節(jié)量化因子等參數(shù)改善控制效果,達(dá)到柔順控制的目的.因此,本文采用模糊控制的方法對變構(gòu)過程進(jìn)行控制.
2.2 組合體變構(gòu)模糊控制器
變構(gòu)控制采用的模糊控制器的基本框架如圖6所示.
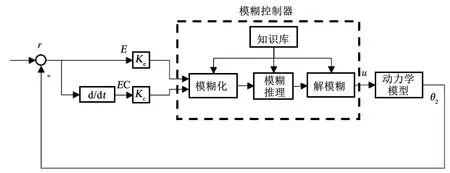
圖6 控制系統(tǒng)
A={ZE,S,M,B},
B={NB,NM,NS,ZE,PS,PM,PB},
C={NB,NM,NS,ZE,PS,PM,PB}.
式中:S、M、B分別為小、中、大;NB、NM、NS、ZE、PS、PM、PB分別為負(fù)大、負(fù)中、負(fù)小、零、正小、正中、正大.三者的隸屬度函數(shù)如圖7(a)~圖7(c)所示.
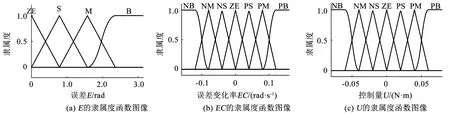
圖7 隸屬度函數(shù)圖像
模糊控制規(guī)則基于以下幾條原則進(jìn)行設(shè)計(jì):
1)誤差E較大時(shí),提供較大正向控制力矩或較小負(fù)向控制力矩;
2)誤差變化率EC為負(fù)且較大時(shí),提供較小的正向控制力矩或較大負(fù)向控制力矩,EC為正且較大時(shí),提供較大正向控制力矩或較小負(fù)向控制力矩;
3)由于鉸鏈摩擦的阻礙作用,E極小且EC極小時(shí),適當(dāng)正向增大控制力矩.
模糊規(guī)則表見表1.對上述的模糊控制器采用min-max模糊推理方法,并利用重心法實(shí)現(xiàn)解模糊.
2.3 量化因子模糊調(diào)節(jié)器
為改善控制系統(tǒng)的動(dòng)態(tài)特性,達(dá)到柔順變構(gòu)的效果,需要對量化因子Ke與Kc進(jìn)行在線的調(diào)節(jié).量化因子Ke與Kc對系統(tǒng)的動(dòng)態(tài)性能的影響主要表現(xiàn)為:Ke越大,系統(tǒng)輸出的上升速率越大,調(diào)節(jié)時(shí)間越長,會(huì)產(chǎn)生更大的超調(diào);Kc越大,響應(yīng)速度越慢,調(diào)節(jié)時(shí)間越短,超調(diào)量越大[15].
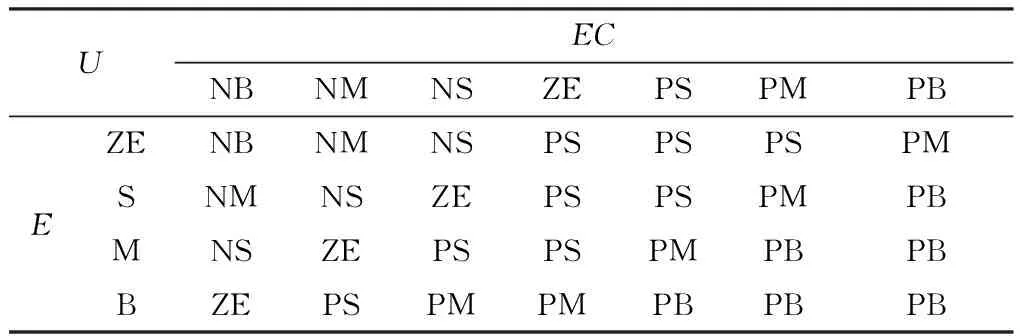
表1 模糊控制器的模糊規(guī)則表
將θ2由0變化到30°的階段定義為起動(dòng)段,將θ2達(dá)到150°之后的階段定義為末段.柔順控制主要關(guān)注的是這兩個(gè)階段,則變構(gòu)過程的“柔順”主要包含以下幾點(diǎn)含義:
基于以上要求,量化因子調(diào)節(jié)器的調(diào)節(jié)規(guī)則如下,改進(jìn)后控制系統(tǒng)的框架如圖8所示.
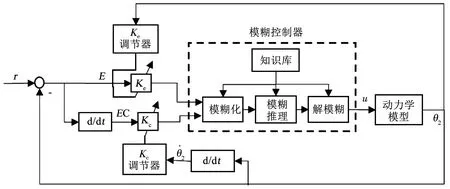
圖8 改進(jìn)后的控制系統(tǒng)

3)末段的Kc相對于起動(dòng)段的Ke較小.
4)其他階段. 量化因子為定值.
THETA={S,M,B},
DTHETA={ZE,S,M,B},
KE={S,M,B},
KC={S,M,B}.


表2 起動(dòng)段Ke的調(diào)節(jié)規(guī)則

表3 末段Ke的調(diào)節(jié)規(guī)則

表4 起動(dòng)段與末段Kc的調(diào)節(jié)規(guī)則
3 數(shù)學(xué)仿真
圖3中標(biāo)注的各幾何參數(shù)以及其他仿真參數(shù)設(shè)置見表5.

表5 仿真參數(shù)設(shè)置
模糊推理方法仍為min-max方法,解模糊方法仍為重心法.
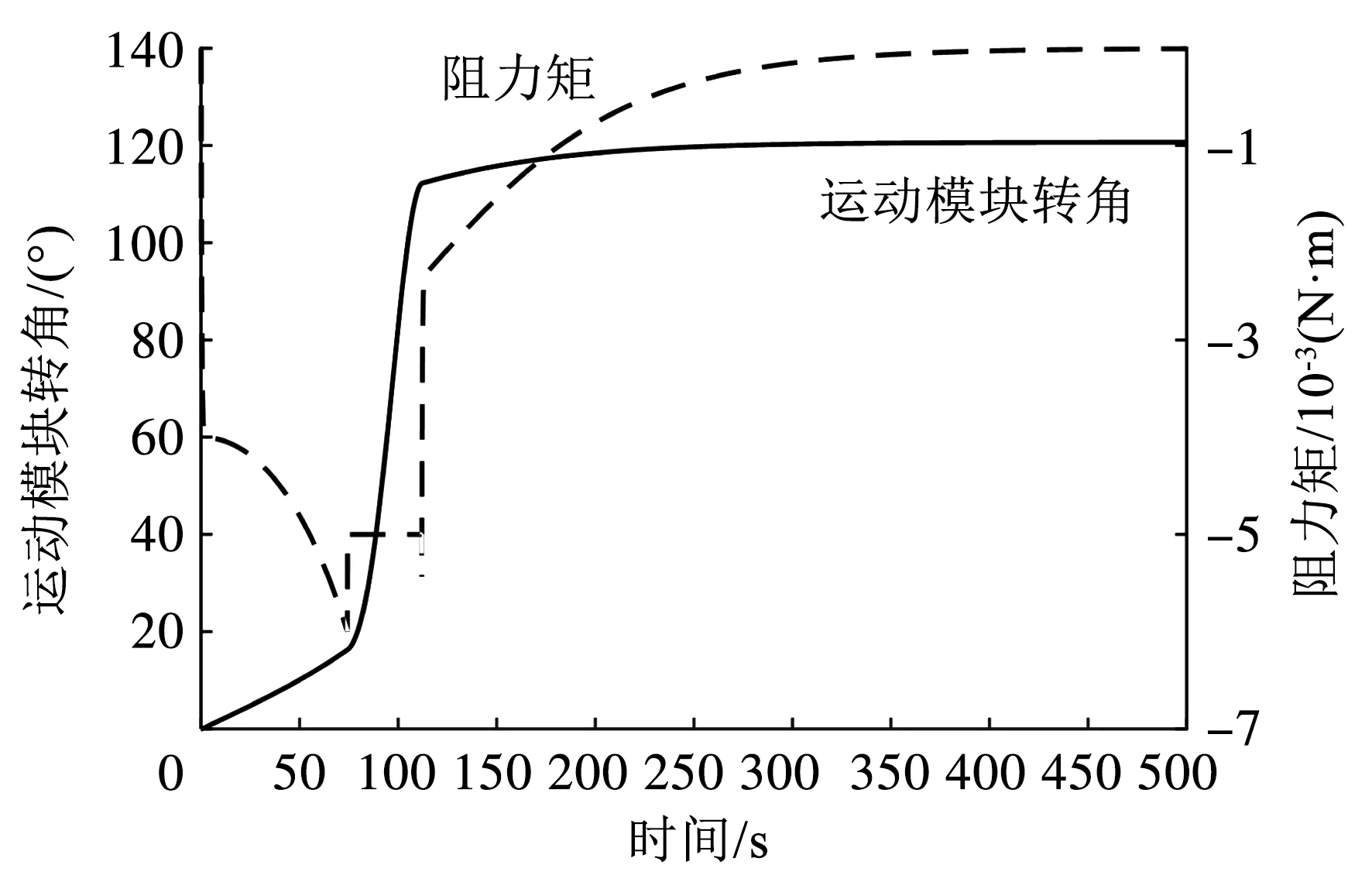
圖9 鉸鏈摩擦對變構(gòu)的影響

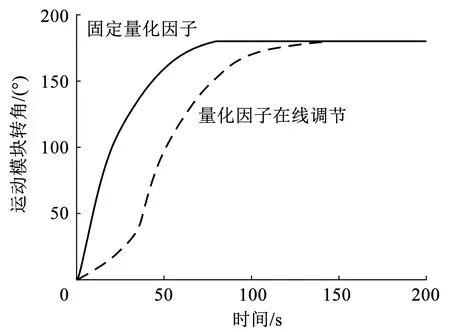
圖10 運(yùn)動(dòng)模塊轉(zhuǎn)角隨時(shí)間變化的曲線
圖11 相對角速度隨時(shí)間變化的曲線
量化因子恒為1和量化因子在線調(diào)節(jié)兩種情況下本體姿態(tài)角θ1變化曲線如圖12所示.
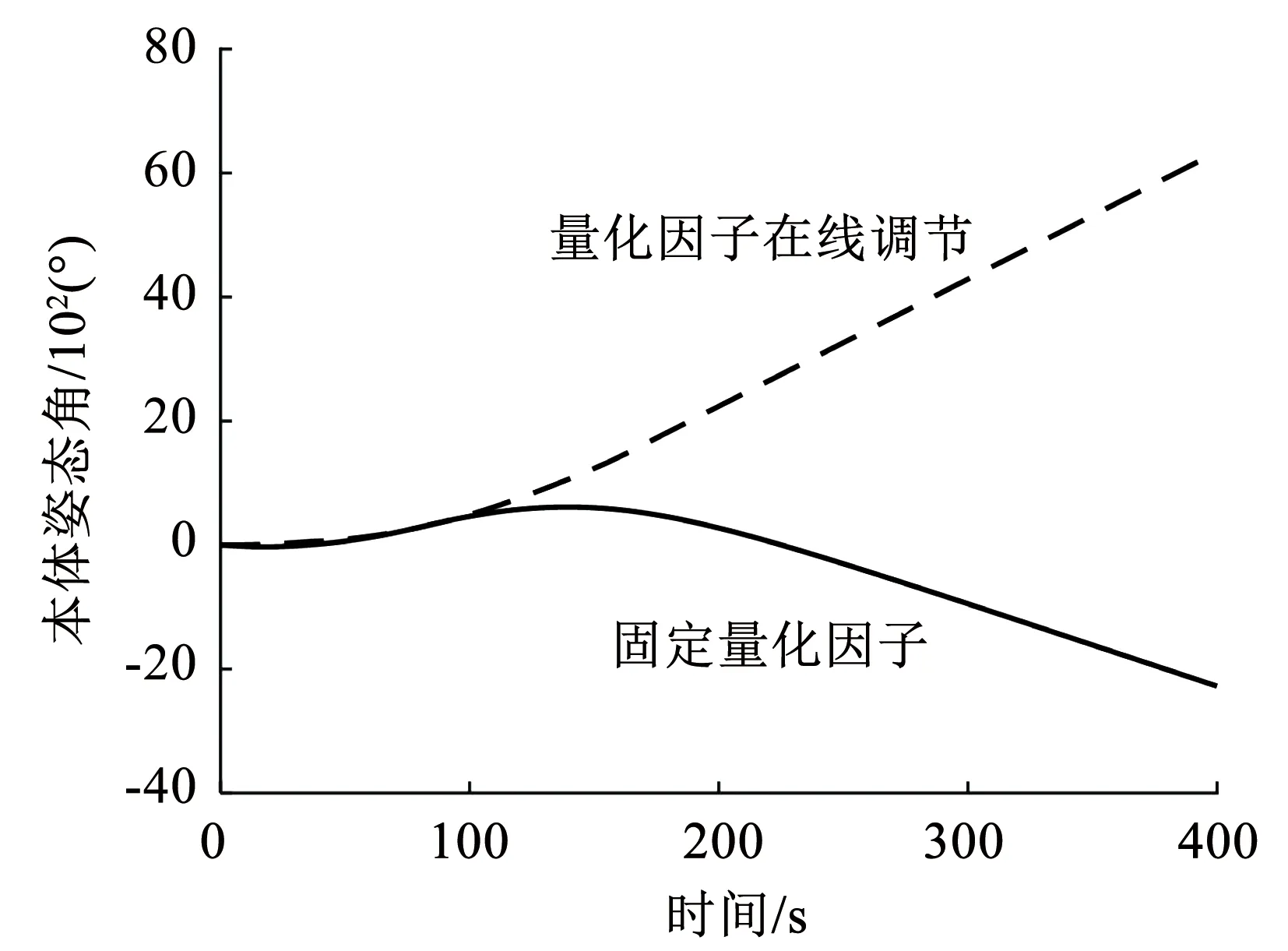
圖12 本體姿態(tài)角隨時(shí)間變化的曲線
由圖10、11仿真結(jié)果可知,所設(shè)計(jì)的控制器能輸出足夠大的控制力矩以抵抗磁力矩的阻礙,且量化因子在線調(diào)節(jié)的控制中,相對角速度變化相比于固定量化因子的控制更平緩.由圖12可知,兩種控制方法下,本體姿態(tài)在變構(gòu)結(jié)束后均線性變化,即本體勻速轉(zhuǎn)動(dòng),但量化因子在線調(diào)節(jié)情況下,變構(gòu)結(jié)束前θ1正向增加,說明本體角速度與模塊轉(zhuǎn)動(dòng)同向,再次表明兩者相對角速度較小,碰撞沖擊較小.為了量化變構(gòu)過程的柔順程度,引入以下兩個(gè)評(píng)價(jià)參數(shù):
2)變構(gòu)完成瞬間(即θ2首次達(dá)到180°瞬間時(shí)刻)模塊相對于本體的角速度大小,記為ωend.

(10)
(11)
式(10)反映了相對角速度變化的平緩程度,式(11)反映了變構(gòu)完成時(shí)運(yùn)動(dòng)模塊與本體碰撞的沖擊程度.兩個(gè)指標(biāo)在采用固定量化因子和在線調(diào)節(jié)量化因子兩種控制方法下的值見表6.
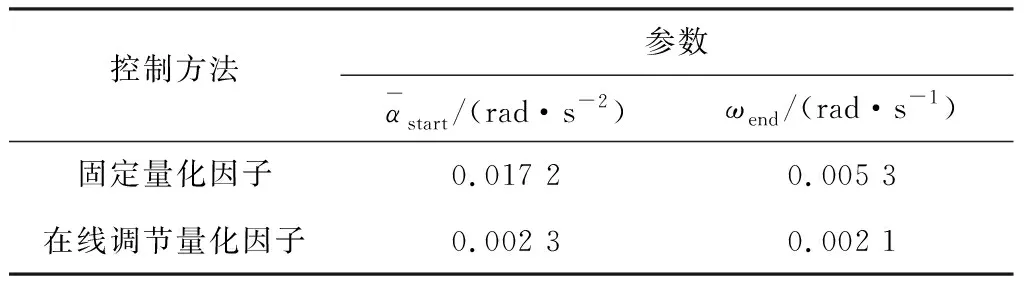
表6 柔順程度指標(biāo)對比
由表6可知,量化因子在線調(diào)節(jié)的控制方法中兩個(gè)指標(biāo)均低于固定量化因子的方法,說明量化因子在線調(diào)節(jié)的方法能有效增加變構(gòu)控制的柔順程度,達(dá)到了控制目標(biāo).
4 物理試驗(yàn)驗(yàn)證
為進(jìn)一步驗(yàn)證控制方法的有效性,在三自由度平面氣浮臺(tái)上進(jìn)行了物理仿真試驗(yàn).試驗(yàn)所用的平面氣浮臺(tái)如圖13所示.

圖13 物理試驗(yàn)平臺(tái)
如圖13所示,用兩個(gè)平面氣浮臺(tái)分別模擬變構(gòu)過程中的本體與運(yùn)動(dòng)模塊,兩者之間由銷釘機(jī)構(gòu)的鉸鏈替代磁鉸鏈進(jìn)行連接.銷釘鉸鏈阻力矩來源滑動(dòng)摩擦,與磁鉸鏈的滾動(dòng)摩擦在動(dòng)力學(xué)模型形式上相同,均可由圖5所示曲線進(jìn)行描述.
氣浮臺(tái)2上的單軸偏置動(dòng)量輪提供變構(gòu)控制所需的力矩,最大輸出力矩為0.1 N·m.兩個(gè)氣浮臺(tái)的姿態(tài)信息由動(dòng)作捕捉系統(tǒng)測量.物理試驗(yàn)方案如圖14所示.

圖14 物理試驗(yàn)方案
分別對固定量化因子和量化因子在線調(diào)節(jié)兩種方法進(jìn)行試驗(yàn),得到的實(shí)驗(yàn)結(jié)果如圖15、16所示.
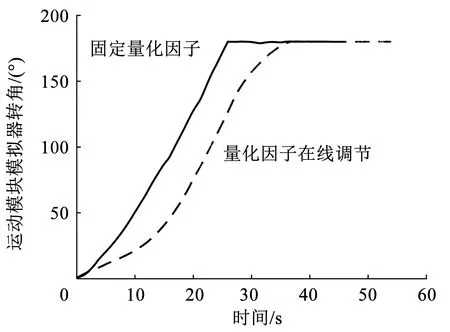
圖15 運(yùn)動(dòng)模塊模擬器轉(zhuǎn)角隨時(shí)間變化的曲線
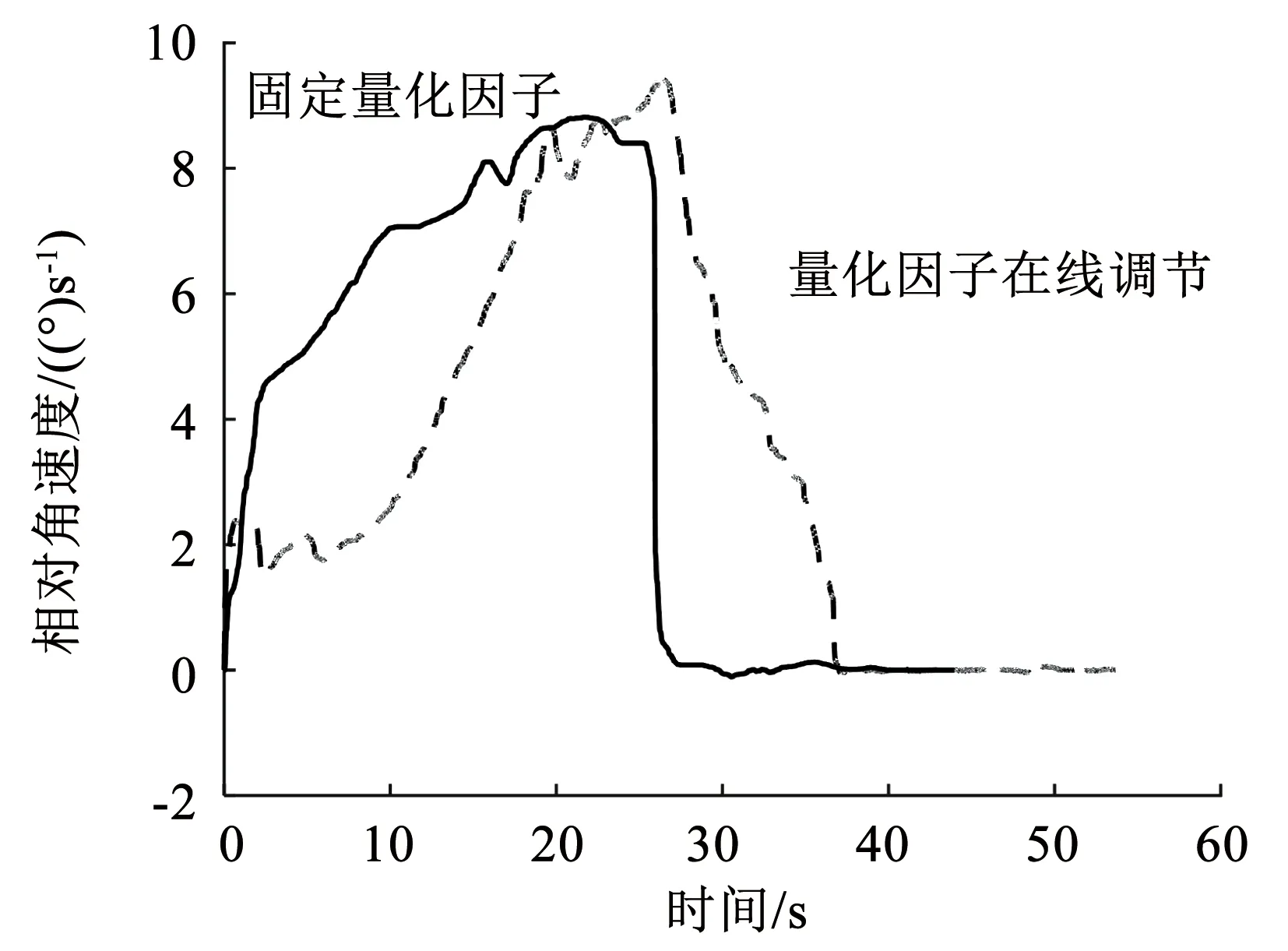
圖16 相對角速度隨時(shí)間變化的曲線
仍采用上述的柔順程度評(píng)價(jià)參數(shù)對實(shí)驗(yàn)結(jié)果進(jìn)行評(píng)估,則兩個(gè)指標(biāo)在兩種控制方法下的值見表7.
由實(shí)驗(yàn)結(jié)果可知,量化因子在線調(diào)節(jié)的模糊控制器相比于固定量化因子的模糊控制器,柔順指標(biāo)均更優(yōu),相對角速度變化更平緩,變構(gòu)控制的柔順程度更高,證明了控制算法在柔順控制上的有效性.
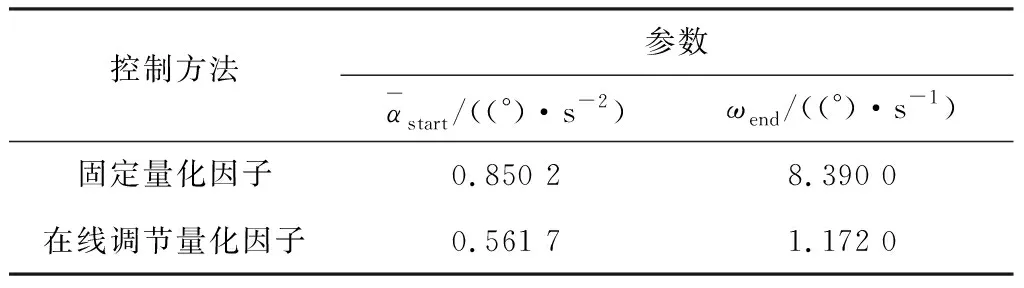
表7 柔順程度指標(biāo)對比
5 結(jié) 論
1) 為解決磁鉸鏈機(jī)構(gòu)約束下的微納聚合體衛(wèi)星變構(gòu)過程的柔順控制問題,設(shè)計(jì)了變構(gòu)過程的模糊控制器,并在控制器中引入量化因子在線模糊調(diào)節(jié)器用于改進(jìn)原控制器以達(dá)到更柔順的控制效果.
2)變構(gòu)過程的動(dòng)力學(xué)仿真結(jié)果表明,由于磁鉸鏈處阻力矩的存在以及空間多體系統(tǒng)各部分間的動(dòng)力學(xué)耦合,變構(gòu)過程會(huì)受到一定阻礙.
3) 通過數(shù)學(xué)仿真與氣浮臺(tái)物理仿真實(shí)驗(yàn)對控制方法進(jìn)行驗(yàn)證.驗(yàn)證結(jié)果表明:改進(jìn)后的控制器可抵抗磁鉸鏈阻力矩的影響,成功實(shí)現(xiàn)變構(gòu);相比于未改進(jìn)控制器,控制效果柔順程度明顯增強(qiáng),可減小變構(gòu)過程中磁鉸鏈脫附的可能性與模塊間的碰撞沖擊.