智能鍛造系統的研究現狀及發展趨勢
2020-12-08 06:01:00徐文臣徐佳煒卞紹順陳偉浩鄧磊單德彬
精密成形工程 2020年6期
徐文臣,徐佳煒,卞紹順,陳偉浩,鄧磊,單德彬
(1.哈爾濱工業大學 金屬精密熱加工國家級重點實驗室,哈爾濱 150001;2.連云港杰瑞自動化有限公司,江蘇 連云港 222006;3.華中科技大學 材料成形與模具技術國家重點實驗室,武漢 430074)
近年來我國制造業發展迅速,目前產值已經超過美國和德國,居世界第一,然而,自主核心技術與裝備的缺乏,導致我國制造業仍處于大而不強的狀態[1—2]。縱觀全球,機器學習、大數據分析以及機器人的普及應用,掀起了新一輪的產業革命浪潮,推動了制造業向智能化和信息化發展。在這樣的智能浪潮下,各個國家都將智能制造列為發展重點,美國2011 年提出了“Advanced Manufacturing Partnership Plan”(先進制造聯盟計劃)的戰略,而德國也于2013 年正式提出了工業4.0 戰略[3]。中國作為制造大國,急需進一步做大做強制造業,擺脫低端制造的困境,抓住這次智能產業革命的機遇,對提升我國制造業的智能化水平具有重要意義[4]。特別是鍛造行業作為我國制造業的重要組成部分,目前在鍛件產量上已躍居世界第一,但是仍然以人工鍛造為主,與歐洲、美國和日本等發達國家存在較大差距。隨著我國由制造大國向制造強國的方向轉變,迫切需要對傳統的鍛造技術與裝備進行升級換代,推動鍛造行業向自動化、數字化和智能化的方向發展[5]。
鍛造行業由于生產環境惡劣、危險性高、勞動強度大等問題,并面臨勞動力成本激增的壓力,通過使用機器人來代替高溫環境下的人工操作,完成連續的上料、鍛造、翻轉和搬運等危險性高和勞動強度大的工作,是實現智能鍛造技術的基礎[6]。在智能鍛造過程中,使用機器人進行鍛件抓取可能會導致設備之間的干涉,以及由于工序設置不當,造成鍛件熱量散失的問題,因此需在鍛件生產之前對機器人、壓力機以及傳輸機構的運動進行時序規劃。通過優化機器人運動路徑以及各設備的運動速度,可實現鍛件高效穩定的生產[7]。智能鍛造產線啟動以后,需實時記錄產線數據,例如坯料溫度、模具溫度、成形噸位、模具速度以及鍛件尺寸等工藝參數,并對采集到的數據進行實時分析,判斷產線處于的狀態并觸發相應狀態的事件[8]。智能鍛造技術不僅包含鍛件鍛造過程的智能管控,也包括了新鍛件的工藝開發。通過使用CAPP(Computer aided process planning,計算機輔助工藝設計)系統快速開發鍛造工藝,有利于實現設計工藝文件的規范標準化,提高工藝設計的效率,并保證產品質量的可靠性[9]。
事實上,機器人自動化鍛造生產線是智能鍛造的初級階段,而在自動化鍛造生產線上如何實現產線數據實時分析及新工藝推理,則需要開發面向未來的智能鍛造系統。總體來看,智能鍛造系統可分為4 個模塊,包括機器人自動化生產線及集成控制系統、多機器人協作優化系統、鍛造產線實時數據存儲及分析系統和新鍛件工藝快速開發系統,4 個模塊之間相互交叉和關聯。文中總結了這4 個模塊的最新研究成果和應用情況,并簡要分析了智能鍛造存在的問題及解決思路。
1 機器人自動化生產線及集成控制系統
當前的工業發展,智能化已經是必由之路,而實現智能化的前提必然有自動化的應用需求,工業機器人作為自動化產線的重要裝備,一直備受關注[10]。對于工業機器人的研究,大致可分為3 個階段[11]。
第一階段是關于工業機器人的運動學以及機械結構性能的研究。機器人的運動學主要研究機器人位置正解和位置逆解。位置正解是通過計算機器人每個坐標軸的變化,從而確定其運動的最終位置,而位置逆解則是定好其運動的最終位置,逆向求解所需坐標軸的變化。由于逆向求解可能性較多,難以找到適當的解,為了解決這一難題,學者們提出了空間多自由度多環并聯機構學這一理論,制造了并聯機器人[12—13]。第二階段是為機器人增加了外部感知能力,這種外部感知力的實現主要憑借傳感器。第三階段是機器人的智能化,通過多個不同類型的傳感器集成,能夠完成對周邊環境比較完整的感知,從而輔助系統進行智能判斷與決策,例如,利用視覺傳感器和超聲波傳感器進行自動識別并抓取鍛件[14]。
在國外,工業機器人應用已經較為成熟,比較著名的公司有日本的FANUC、YASKAWA,瑞典的ABB以及德國的KUKA 等[15]。國內工業機器人研究起步較晚,很多核心零部件以及操控系統目前大多依賴國外進口。對于鍛造行業,由于其工作環境惡劣,機器人會受到鍛造生產環境中壓力機的循環振動和鍛造過程中沖擊碰撞等階躍/交變外載荷作用,這對機器人的穩定性和可靠性提出了挑戰。不僅如此,由于鍛件種類復雜,鍛件溫度較高,機器人末端夾持機構需實現高溫下長軸類、盤餅類、枝芽類等異形鍛件的空間定位與夾持,滿足鍛造機器人在其作業空間內的靈活操作要求。濟南大學針對熱加工過程中機器人的熱防護問題,利用ANSYS 軟件對機器人進行溫度場分析,精準確定了需要防護的零件并設計了隔熱結構。在面對夾持端的熱變形問題上,挑選Q235 作為夾持器骨架并利用有限元分析優化了夾持器的設計,圖1為其熱加工搬運機器人的三維造型圖[16]。沈陽新松機器人自動化股份有限公司針對曲軸自動化鍛造生產線中的機器人夾持器進行了設計,在考慮了工件的溫度后選用耐熱不銹鋼制作鉗口與工件接觸部分,由于曲軸帶有飛邊,通過V 型結構完成鍛件抓取[17]。
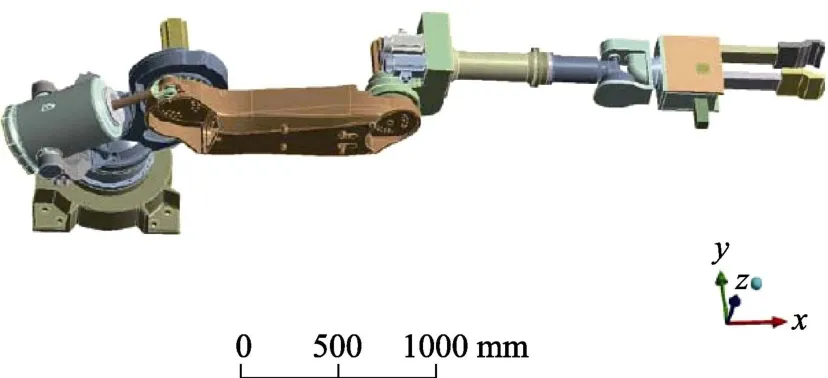
圖1 熱加工搬運機器人三維造型[16]Fig.1 Three-dimensional model of robot for handling hot forgings
對于大多數鍛件,基本都是多工步的,例如輪轂鍛件工序多為鐓粗、預鍛、終鍛、沖孔和切邊,而連桿鍛件工序多為輥鍛、預鍛、終鍛、沖孔、切邊和精整,此時已不再是一臺機器人和一臺壓力機的配合,而是多臺機器人與多臺壓力機的協同工作,這對鍛造產線的集成控制系統提出了很高的要求[18—20]。通過使用虛擬仿真技術,建立多個機器人與設備的實體模型,調試編寫的集成控制軟件是否存在問題,是現在一種非常高效便捷的措施[21]。北京科技大學和北京機電研究所合作,完成了曲軸智能鍛造產線的搭建,實現了曲軸鍛造的質量智能控制[22]。濰柴動力股份有限公司將多個工業機器人和熱模鍛壓力機串聯起來,完成了連桿從輥鍛到校形的所有鍛造工步[23]。連云港杰瑞自動化有限公司和哈爾濱工業大學等單位合作,針對輪轂和連桿兩種鍛件分別設計了串聯產線和并聯產線,如圖2 和圖3 所示。輪轂生產線由于各工序生產節拍較接近,設計了串聯生產線以確保各工序時序匹配,效率最高。連桿生產線由于輥鍛制坯節拍快,為了和后續工序匹配,設計了并聯產線加快生產節拍。此外,當連桿產能增加時并聯生產線可以充分發揮其作用,也可通過關閉生產線的并聯功能來降低產能以適應訂單變化。
機器人自動化產線集成控制系統相對于其他3個模塊,是最接近鍛造執行端的模塊,它將計劃層和執行端緊密集合到了一塊。集成控制系統一方面將從新鍛件工藝快速開發系統和多機器人協作優化系統獲得的鍛件工藝參數作為指令下達給產線設備,另外又實時監視底層設備信息,將采集到的產線數據經處理后提交給鍛造產線實時數據存儲及分析系統和多機器人協作優化系統,以觸發新事件[24]。
2 多機器人協作優化系統
在智能鍛造產線中,由于鍛件通常為多工步鍛造,必然需要多臺機器人進行相互配合,但多機器人系統容易產生節拍沖突問題。當發生沖突問題,輕則減慢生產節拍,重則導致設備受損、系統崩潰。通常解決沖突的辦法主要包括3 種[25]:第一種是調整速率法,就是當發生沖突時,調整機器人間的相對速度甚至暫停某一機器人運動;第二種是調度控制法,就是預先考慮可能產生沖突的原因,然后針對這些原因設計出合理的結構和通信方式來防止發生沖突;第三種是交通規則法,就是在路徑上設置規則,讓所有機器人遵守這些規則,從而避免沖突的產生。

圖2 汽車輪轂機器人鍛造串聯自動化產線布局示意圖Fig.2 Schematic diagram for the layout of the serially automatic production line for automotive wheel robot forgings
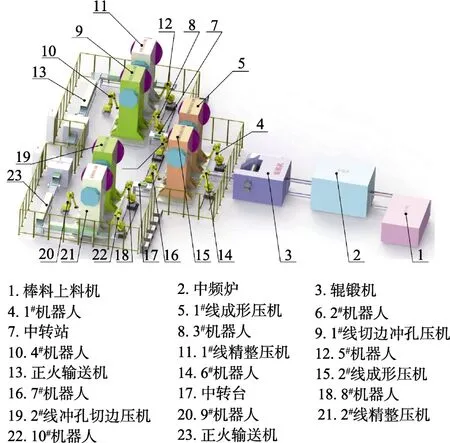
圖3 汽車連桿機器人鍛造并聯自動化產線布局示意圖Fig.3 Schematic diagram for the layout of the parallel automatic production line for automotive connecting rod robot forging
多臺機器人協調規劃方法通常分為兩種,包括集中式規劃和分布式規劃。集中式規劃是指在所有的機器人構形空間中直接規劃每一臺機器人的軌跡,此規劃方法雖然高效,但因為多機器人的構形空間屬于高維空間,計算難度較大。相對于集中式規劃,分布式規劃會單獨規劃產線的每一臺機器人的軌跡,然后通過協調的方法,調整機器人的預定義路徑、時間延遲和運行速度等,達到協調規劃的目標。此種方法雖然高效,但是會失去一定的完整性[26—27]。在機器人自動化鍛造工藝中,在生產線設備之間不發生任何干涉的基礎上,多采用分布式的規劃方法,規劃機器人與壓力機等運動設備的控制參數,協調各部件運動關系,以產線的生產節拍為指標,不斷優化機器人的運動軌跡。機器人的運動路徑規劃通過采用3 種算法,包括廣度優先算法、深度優先算法、A*算法[28—30]。由于鍛件材料不同,其始鍛溫度和終鍛溫度各不相同,如何保證在始鍛溫度和終鍛溫度范圍內完成鍛件的鍛造,是機器人協調規劃的另一關鍵指標。此外,由于鍛造溫度越高,材料流動性越好,鍛件越容易充填滿,如何優化機器人運動軌跡以減少鍛件熱量散失非常重要。
搭建智能鍛造生產線時必須構建滿足其生產需要的多機器人協作優化系統。華中科技大學通過機器人運動仿真平臺,構建復雜產線的運動仿真模型,并進行機器人運動路徑仿真,產線實體模型圖示例如圖4 所示,機器人運動仿真示例如圖5 所示。在建立大量的實例仿真的基礎上,通過數據分析獲得生產線時序及空間規則知識,結合鍛件熱量散失模型完成推理知識庫的搭建,當從新鍛件工藝快速開發系統獲得鍛件工藝時,時序規劃系統會根據推理知識庫里的知識,利用多目標優化算法,迭代優化出符合鍛件生產節拍且鍛件熱量散失較少的機器人運動路徑,將其提供給產線集成控制系統用于下達命令。當從集成控制系統接收到產線數據后,多機器人協作優化系統會將產線數據和預設定參數進行比對分析,從而決定是否對產線設備的運動參數進行調整。
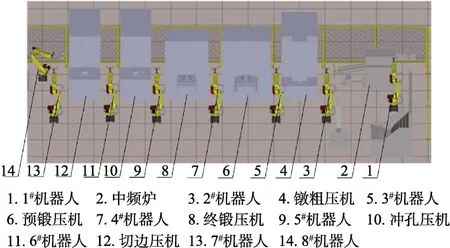
圖4 機器人產線運動仿真模型Fig.4 Simulation model of production line about robotic motion

圖5 機器人上下料運動仿真示例Fig.5 Simulation example of moving billet with robot
3 鍛造產線實時數據存儲及分析系統
智能鍛造系統核心部分便是數字化,如何利用好智能鍛造產線中采集到的數據以及如何在鍛造過程中采集更多的數據是實現智能鍛造的關鍵[31—32]。鍛件尺寸是衡量鍛件是否合格的關鍵指標。在鍛造生產過程中,由于設備振動,鍛件處于高溫環境下,尺寸數據很難準確獲取,華中科技大學采用高速投影與振動補償方法來保證鍛造振動環境下數據的穩定測量,利用視點虛擬規劃方法解決熱鍛件尺寸測量難以現場規劃問題,并通過多視圖數據融合與背景去除方法優化了關鍵尺寸難以提取的問題[33]。沈陽農業大學分析了高溫農機鍛件中氧化皮、燒蝕、碳化等因素對鍛件邊緣尺寸檢測的不利影響,構建了邊緣檢測算子以減小鍛件圖像噪聲對邊緣尺寸檢測的干擾,利用機器視覺算法研究了熱鍛件形位公差在線非接觸測量的問題[34]。機器視覺算法的發展不僅使得熱鍛件尺寸在線檢測成為可能,也提高了模具磨損檢測和位置精度檢測的準確性[35—36]。北京科技大學使用視覺識別傳感器抓拍鍛造過程中鍛件位于模具的位置,將圖片處理后與定位精確的鍛件位置圖像作對比,若有偏差則發出錯誤信號,提醒需要人工修復。在模具磨損檢測方面,利用非接觸測量技術構建磨損后模具的三維模型,然后通過點云與磨損前的模具模型對比,從而獲知模具磨損程度并推測模具壽命[22]。
通過溫度傳感器和非接觸測量技術,使鍛造產線的數據越來越多樣化,但如何利用好產線上采集到的數據是需要研究的問題。利用產線數據分析產線運行情況,是進行鍛造生產線預知性維護的核心。在智能鍛造生產的過程中,會出現各種因素干擾生產過程的穩定,通過采集到的實時產線數據經由計算機算法分析出產線擾動的因素,并進行智能產線調節,是智能鍛造數據分析研究的重點[37]。常用的算法主要有神經元算法、決策樹算法、回歸算法和聚類算法,其中神經元算法和決策樹算法都需要比較完整的輸入,必須包含影響輸入量的各個因素,因而需要傳感器數量較多,產線成本會大大提升。聚類算法則是利用模型的點與中心點的相似度進行決策,其所需數據種類相對其他兩種算法較少,適合于對已有的產線數據進行分析,判斷所處工況,但是聚類算法無法實現對數據未來趨勢的判斷,因而在鍛造數據實時分析時,多采用非線性回歸算法,根據采集到的數據對未來工況進行預測,從而對產線下達相應的指令來實現產線的智能調節[38—39]。
鍛造產線實時數據存儲及分析系統是智能鍛造系統的核心,通過分析產線集成控制系統收集到的產線實時數據,并結合多機器人協作優化系統的分析結果,將最終決策提供給產線集成控制系統以下達命令,然后再接收產線調整后的反饋數據并分析,再將決策提交給產線集成控制系統,如此往復,從而使產線處于最佳運行狀態。
4 新鍛件工藝快速開發系統
智能鍛造系統不僅僅要在鍛造過程中體現鍛件質量智能管控,還要在新鍛件工藝開發上體現自動化與智能化。計算機輔助工藝過程設計(Computer aided process planning,CAPP)是實現自動化和智能化設計的重要技術,可分為3 種類型[40]。
第一種為派生式CAPP,它是將相似特征的鍛件分組歸類,每類選用一個標準件,將其標準件的工藝存儲至鍛件工藝庫中,如若設計人員設計相似鍛件工藝時,僅需要輸入這類鍛件的編碼,便可快速檢索到標準鍛件的工藝,在此基礎上結合實際鍛件要求,利用人工或計算機修改生成新的工藝卡片[41]。第二種為創成式CAPP,它是利用存儲的專家知識自動生成鍛件工藝,此方法基本不要人工干預,但由于鍛件種類繁多,鍛件特征復雜,系統沒有獲取知識的能力,設計精度較差[8]。第三種為CAPP 專家系統,其主要由推理機和知識庫組成,知識庫存儲的是關于鍛件的工藝知識,而推理機是針對現有問題,利用存儲的專家知識,按照一定推理策略推理出鍛件的工藝。相對于創成式CAPP,CAPP 專家系統能自主獲取更新知識,因而設計精度較高[42]。
從上述3 種類型的CAPP,不難發現其正向著知識化和智能化的方向發展。上海交通大學將案例推理(Case-based reasoning,CBR)應用于冷鍛設計過程中[43]。CBR 過程如圖6 所示,其解決問題步驟主要是涉及實例表示、實例檢索、實例修改、實例存儲。使用CBR 首先需對于冷鍛鍛件的特征進行分類,其特征包括特征名、特征名義尺寸、尺寸公差、形位公差等,再進行實例檢索,利用特定的搜索算法比如k-鄰近算法、知識索引算法或推理索引算法等將新鍛件的內部外部特征和實例庫中鍛件進行比較,找到最相關的鍛件;然后,利用知識庫進行修改,修改完成后進行案例評估,如果可以則直接將該實例存儲到實例庫作為一個新的實例,如果不能則再次提交知識庫進行實例修改,直到修改成功,然后將修改后的案例存儲到實例庫中。山東大學將三層 BP(Back propagation)神經網絡用于冷擠壓工藝的自動化設計,在使用神經網絡之前,必須對擠壓鍛件特征進行編碼,其特征包括形狀特征、關系特征、幾何特征和精度特征。在完成二進制編碼后將其特征編碼的組合作為輸入變量,所使用坯料的特征編碼作為輸出變量進行神經網絡訓練,除此之外還利用人工神經網絡進行了知識的自動獲取[44]。在CAPP 中,鍛件工藝優化是非常關鍵的問題,通用的設計過程是將設計完后的鍛件通過有限元仿真的方式進行局部優化[45—49]。有限元仿真耗時長,而且需要反復修改三維造型圖然后輸入到有限元模型中進行模擬,這降低了設計效率。為此,華中科技大學借助齒輪預鍛件元模型,修改模型上的關鍵尺寸,獲得了大量預鍛件尺寸與成形噸位的實驗樣本,并將極限學習機與遺傳算法相結合,利用樣本進行了訓練,最終達到了不用通過有限元模擬也可實現優化預鍛成形力的效果[50]。上海交通大學利用近似替代模型,并將多種優化算法相結合,從而減少高速鍛造工藝優化的模擬次數,利用較少的模擬量獲取精度較高的優化結果。除此以外,還將CAD 和CAE 集成至多工位高速鍛造工藝智能優化系統里,實現了從CAD 到CAE 的智能建模以及鍛件成形載荷、充填質量和折疊的分析[51]。
對于智能鍛造系統,CAPP 處于鍛件工藝設計優化層面,但這并不意味著與實際智能鍛造生產過程割裂。通過從鍛造產線實時數據存儲及分析系統里提取數據進行分析,從而智能優化鍛件工藝設計,并將優化設計算法以及知識相應的更新以便于新鍛件的設計,從而提高已有的產品和新產品的合格率,才是與智能鍛造系統相匹配的CAPP。
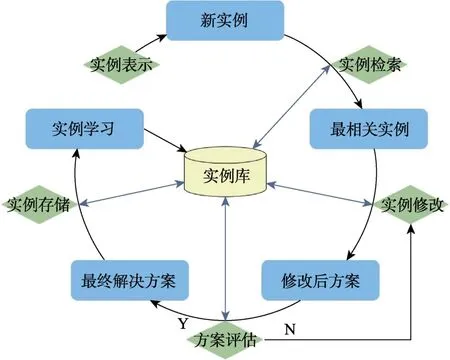
圖6 CBR 推理過程Fig.6 Deductive diagram of CBR
5 結語
智能鍛造系統在機器人自動化產線的基礎上,加上了產線數據采集和數據反饋的功能,通過數據分析結果實時調節產線設備及機器人的運動,使產線能夠穩定高效的運行,在設計層面對產線大數據進行分析,從而優化已有的鍛件設計,更新鍛件設計知識庫。目前,智能鍛造系統雖然在CAPP 專家系統、實時數據采集分析、非接觸性測量技術、多機器人協作和集成控制系統等方面有了一定的發展,但目前仍然存在不少問題。
1)大部分鍛造企業使用的設備較為老舊,仍以人工操作為主,缺少數字接口,導致鍛造過程中關鍵參數無法采集,僅能憑工人經驗進行產線調整,因而同一批次產品尺寸波動范圍較大,產品合格率較低。若更新設備需要投入大量的資金,并且智能化產線對產品的多樣性仍然受限,對于多品種產品的制造不如人工操作靈活,這在一定程度上阻礙了智能產線的布置與推廣。
2)由于缺乏系統理論指導,鍛件和模具尺寸以及鍛造工步設計多依賴于設計人員的經驗及產線上的問題反饋。然而由于企業鍛件種類多,大多數設計人員設計時僅憑人工經驗,難以充分參考同類產品的設計,導致設計出的各類鍛件公差差異性較大,不利于CAPP 專家系統知識庫的構建。
3)鍛造過程中許多數據無法實時獲取,例如模具磨損,而且鍛造過程中鍛件尺寸的檢測數據具有一定的滯后性,這對產線的實時數據分析以及智能調控帶來了一定的挑戰,如何利用可獲取的實時數據對鍛件的生產狀態及時進行在線判斷預測和調整是急需解決的問題。
針對上述問題,可先從以下方面入手。
1)對于企業設備的老舊以及更新所需的資金量大的問題,可以先升級部分產線設備,進行產線數據的積累。例如在多工序鍛造輪轂鍛件時,由于預鍛和終鍛對產品精度影響較大,因此可以在預鍛和終鍛工序處使用帶有數字接口的電動螺旋壓力機,并放置兩臺機器人用于坯料的精準定位。通過采集預鍛和終鍛打擊能量、打擊程以及初始坯料溫度,分析這些參數對產品尺寸波動的影響,從而進行工藝優化,并為以后的產線全自動化和智能化積累豐富的鍛造生產過程數據。
2)對于企業鍛件種類繁多,同類鍛件的設計經驗無法高效利用的問題,可先將企業所存儲的鍛件圖冊進行分類,每類鍛件選取幾個較為典型的案例進行鍛件設計研究,并將設計規則存儲到知識庫中,然后由一般到特殊,在原有的設計規則基礎上增加新的規則。
3)對于鍛造過程中數據無法實時獲取的問題,可先用擬合好的數學模型來進行數據預測,當獲得真實的檢測數據后,比對預測數據和真實數據的誤差,從而對數學模型進行調優。
綜上所述,要想解決上述問題,加快智能鍛造行業的發展,就必須建立企業、高校和研究所緊密結合的產學研團隊,比如高校開展鍛造過程中數學模型的建立和優化,研究所負責智能裝備的研制應用,企業負供鍛件的生產數據和應用場地。在三者通力合作的基礎上,以智能鍛造技術應用中的典型問題為導向進行攻關,培養交叉復合型人才,為促進智能鍛造持續向更深更廣的領域發展提供支撐。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
山東冶金(2019年6期)2020-01-06 07:45:54
世界農藥(2019年2期)2019-07-13 05:55:12
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32