手持式激光雷達觀測玉蘭物候期葉傾角變化
2020-12-05 01:55:18孫統漆建波黃華國
遙感信息 2020年5期
關鍵詞:測量
孫統,漆建波,黃華國
(北京林業大學 林學院,北京 100083)
0 引言
植被主要通過葉片進行光合作用,其光能吸收強弱決定了冠層生產力[1]。影響葉片光能吸收的因素有葉面積大小、葉傾角分布、光能轉換效率等。其中,葉傾角分布的影響最為復雜,它關系著植被冠層對太陽輻射的削弱作用以及太陽輻射穿透植被冠層的概率,定量表達為消光系數和孔隙率。常利用消光系數和孔隙率并根據比爾定律來估測冠層葉面積指數[2]。因此,深入了解植被冠層葉傾角分布對理解太陽輻射傳輸和植被生理過程具有重要意義。
葉傾角定義為植株葉片平面與水平面的夾角,常用葉片法向量與垂直方向夾角計算求得。葉傾角的測量方法基本可以分為直接測量和間接測量2類。直接測量精度較高,但費時費力:利用量角器、尺子、羅盤組成的簡單儀器逐葉片測量[3];或者由高精度電位器和機械臂組成的機械裝置進行測量[4]。基于圖像的間接測量方式快速方便,但也需要搭建平臺以拍攝不同角度照片[5]。近年來,激光雷達的快速發展為葉傾角的準確測量提供了一種新的技術途徑。
對于激光雷達來說,不同的數據獲取平臺和掃描方式決定了所獲取的三維點云數據在采樣間距、密度和所包含結構細節的豐富程度等方面差異明顯。林業上常用的地基激光雷達分為全方位掃描和線陣掃描2類,全方位掃描儀視場廣、分辨率高,但儀器本身較為笨重、掃描時間長;線陣掃描儀垂直視場窄、分辨率較低,但優勢在于儀器輕便,作業速度快。線陣掃描儀結合SLAM(simultaneous localization and mapping)算法進行實時拼接,理論上也可以實現近似全方位掃描儀的效果[6]。目前,市場上已有成熟的此類產品出現,而以此來研究植株葉傾角的實驗尚未發現。
許多研究表明,植株葉傾角分布在不同冠層高度[7-8]、光照環境[9-11]和生長季節[12-13]下可能會有差異。差異原因主要在于物理和生物2個方面,如樹干結構、樹枝傾角、葉柄形變、生長過程、向光性、重力和風等諸多因素[14]。本文通過手持式激光雷達對玉蘭物候期葉傾角變化進行觀測,并與手工測量進行對比以驗證該方法的準確性,在此基礎上利用激光雷達所測葉傾角探究了玉蘭不同冠層高度在不同時期的葉傾角分布變化規律。
考慮到拼接點云數據可能存在的偏差,首先對比手工測量和點云計算2種不同方式提取的葉傾角數據,較好的一致性是進一步分析的前提;然后比較不同層次葉片在不同時期的平均傾角和分布特征,并結合實際情況做出合理解釋;最后分析該方法存在的誤差原因,說明當前葉傾角定義在研究過程中的局限性。
1 材料和方法
1.1 研究對象
以北京林業大學校園內生物樓前一株玉蘭樹為研究對象,胸徑23.5 cm,樹高約15 m。樹冠近似圓錐體,長勢良好。
玉蘭(MagnoliadenudataDesr.),為木蘭科、木蘭屬落葉喬木。葉紙質,寬倒卵形或倒卵形,先端突尖,長10~18 cm,寬6~12 cm。花先葉開放,花期為3~4個月。落花后開始進行物候觀測以及數據采集工作,不同時期植株照片見圖1。可以看到在4月中旬至5月中旬,玉蘭葉片生長變化明顯,之后逐漸趨于穩定。
1.2 數據獲取
本實驗所用激光雷達儀器為美國KAARTA公司的Stencil系列產品,型號為2-16,具體參數見表1。Stencil系列集成KAARTA 3D SLAM技術,標配一個特征點捕捉相機,在算法上結合激光掃描的點云數據和攝像頭采集的影像數據,從而保證其自主定位和數據拼接效果。
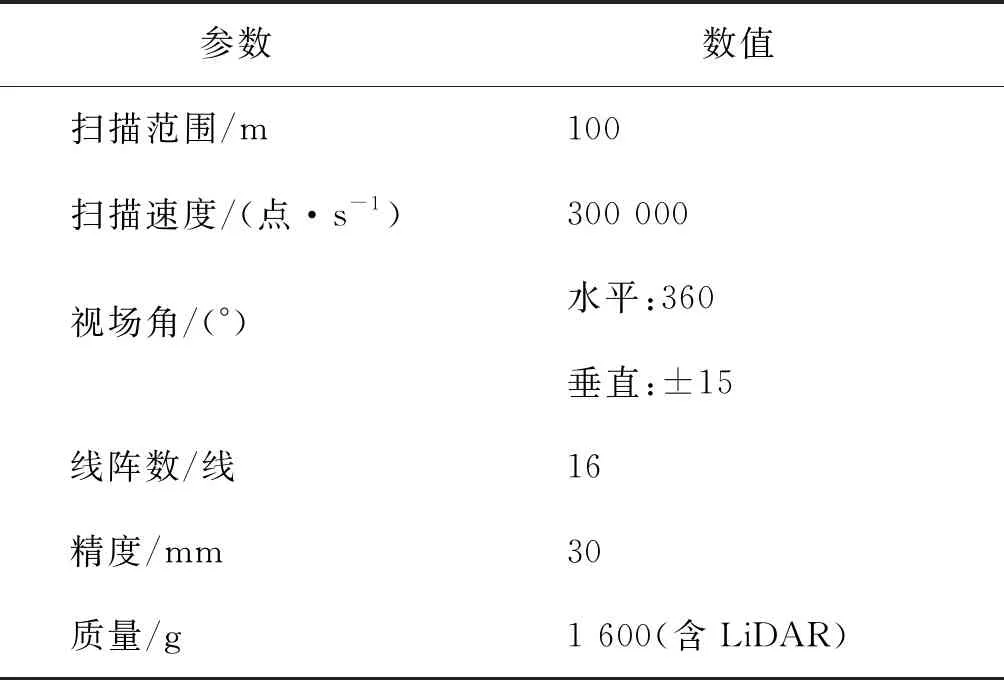
表1 手持式激光雷達儀器參數
選擇晴朗無風天氣下進行掃描,3次觀測日期分別為4月11日、5月10日和6月17日。相比其他地基激光雷達儀器,Stencil產品不需要復雜的架設儀器及數據拼接過程,使用方便,效率極高。采樣前首先連接主產品、蓄電池與顯示器。開機后進行初始化特征點捕捉操作,初始化完成后即可開始測量。此時可以斷開顯示器連接,手持主體和蓄電池繞樹行走進行掃描。由于激光雷達視場角較小,掃描時應注意拉遠距離并抬升儀器角度以獲取冠層上部信息。行走3至4周,并不斷變換位置和角度,以盡可能獲取完整植株信息。掃描完成后自動處理并保存,整個過程耗時在10 min以內。
手工測量葉傾角所用工具由一把帶臂量角器和一根鉛垂線組成。鉛垂線有2個作用:一是保證工具處于豎直方向,量測時應使垂線緊貼量角器同時又不至于彎折;二是充當指針,對應刻度與90°的差值便為葉傾角。尺臂不僅可以用來手持,也可以在葉片間隙較小時伸入,以避免碰觸枝條。測量方法如圖2所示。

圖2 激光雷達儀器與手工測量工具
為驗證點云提取葉傾角精度,在6月17日激光雷達掃描后同時進行手工測量工作。由于樹木較高,只能在下層進行取樣。實測選擇的葉片需要與點云精確對應,因此在測量時還需拍攝多張照片輔助后期判別。舍棄了個別由于自身晃動造成點云判別不清的葉片,最終保留24片葉子實測數據。
1.3 數據處理
使用CloudCompare軟件對3期點云數據進行處理操作:首先剔除周圍環境,只保留目標玉蘭樹;然后將玉蘭樹冠按高度平均分為上中下3層,考慮到上層樹冠逐漸減小,采用分層隨機抽樣時上層選擇30片葉子,中層40片,下層50片。為降低人為選擇的主觀性,將上中下3層分別再均分為3、4、5個小塊區域,每小塊區域選擇10片,盡可能保證均勻隨機分布(圖3)。3期葉片均為獨立隨機選取,并不是相同葉片。
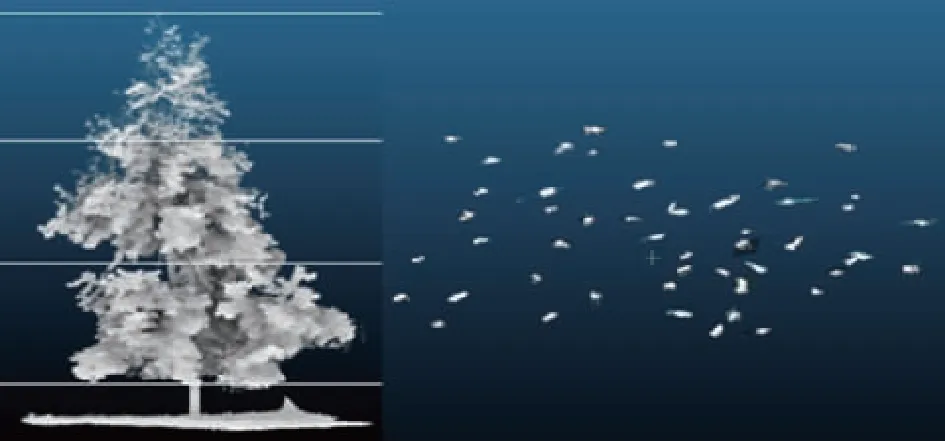
圖3 點云數據(整株與部分提取葉片)
以目視勾繪的方法選擇葉片,每片葉子選擇完成后,使用軟件中的平面擬合工具進行擬合,得到擬合平面法向量(x,y,z),進而通過公式(1)計算求出葉傾角θ。
(1)
2 結果與分析
2.1 點云計算與手工實測數據對比
以24片葉子手工實測葉傾角為驗證數據,在與點云一一對應后,對比點云計算角度與手工實測角度。如圖4所示,相關系數R2為0.78,均方根誤差(root mean square error,RMSE)為6.09°。雖然擬合優度可能略低于其他一些葉傾角實驗,但其他實驗多采用精度更高的全站掃描儀獲取數據[15-16]。本文的研究對象是室外的高大成熟植株,而不是幼樹或者室內的假樹,對象本身和室外環境的復雜性都增加了實驗結果的不確定性。
由圖4可以看到,回歸直線近乎平行1∶1線,走勢非常穩定,2種方法得到的葉傾角均值相差2.8°(點云計算:27.3°,手工實測:24.5°),這也證明了本文測量和計算方法的可靠性。在之后不同層次葉傾角均值的對比中,所選葉片至少有30片。隨著樣本數量的增加,結果會更具說服力。因此,該實驗方法的精度能夠基本滿足本文深入分析的要求。
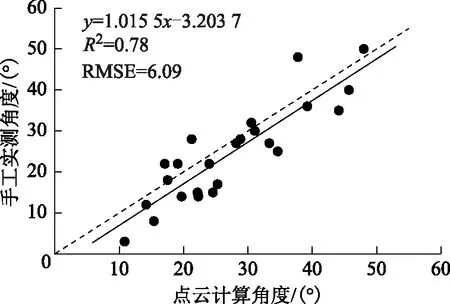
圖4 手工實測和點云計算結果對比
2.2 不同高度層葉傾角變化
不同時期樹冠各層次根據點云計算的葉傾角均值見表2。最大值為6月17日下層(28.6°),最小值為同日上層(16.9°),其他數據多為20°~25°。從日期上看,4月11日葉傾角為下層<中層<上層,上層與下層相差接近5°;5月10日不同層次葉傾角相差較小;6月17日葉傾角為下層>中層>上層,上層與下層相差超過10°。從層次上看,下層葉傾角隨時間變化逐漸增大,而中層和上層逐漸減小,其中上層變化幅度高于中層和下層。對于植株整體來說,葉傾角均值幾乎不變。
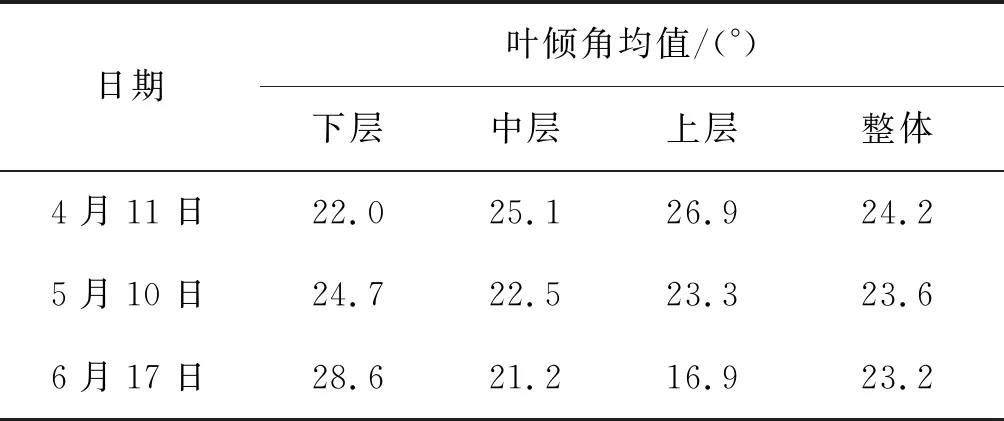
表2 不同時期各層次葉傾角均值
比較整體葉傾角分布,不同時期差異較小(圖5)。4月11日葉傾角分布峰值出現在20°~30°區間,而后來2次出現在10°~20°區間。10°~30°在3次觀測中一直是分布最多的區間。
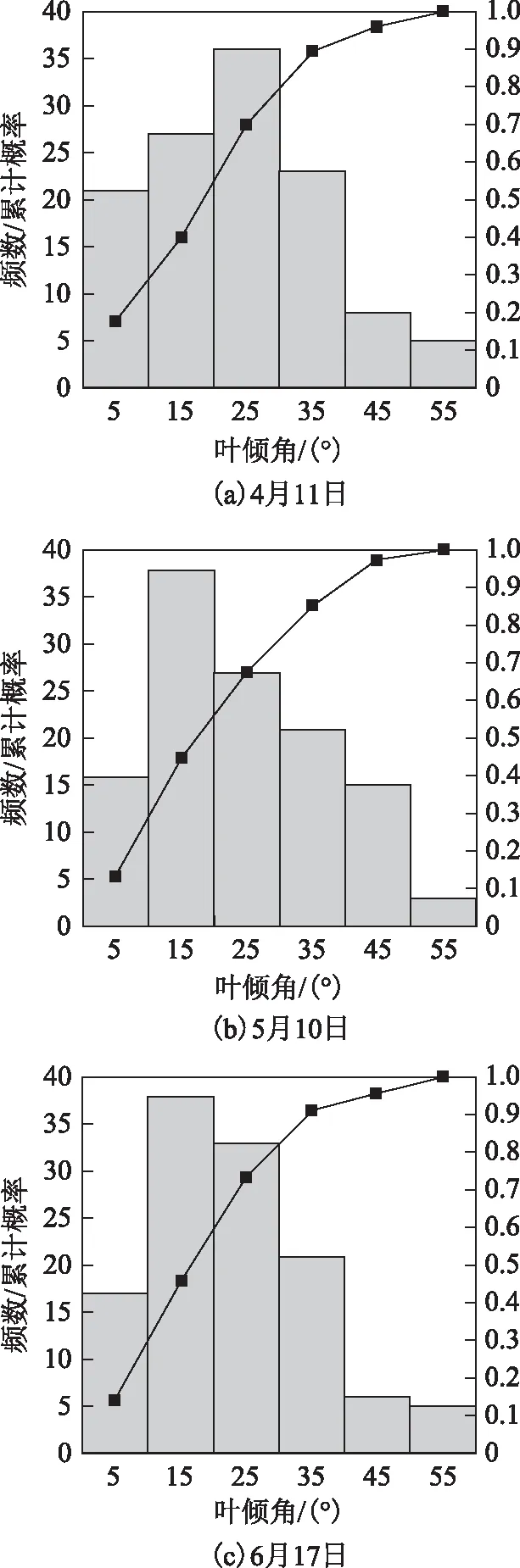
圖5 整株葉傾角分布直方圖和累計概率分布圖
本實驗中,同一植株不同層次葉傾角在物候期呈現出不同的變化規律,原因在于樹木實際形態和當前葉傾角定義。研究對象樹冠為圓錐型,頂端聚攏,底部平鋪。配合照片和點云仔細觀察發現樹冠上層葉片多“上揚”,下層葉片偏“下垂”,中層葉片則“混雜”。在葉片生長物候期內,體積和重量逐漸增加,受重力影響也愈發明顯。最終抑制上層葉片“上揚”(葉傾角變小),促進下層葉片“下垂”(葉傾角變大),中層葉片2種作用抵消(葉傾角變化不明顯)。但是當只比較葉傾角大小時,就會把葉片向上生長和向下生長等同視之,因而忽略了變化的實質原因。
3 討論
3.1 誤差分析
本文的實驗對象是校園內的一株高大成熟、長勢良好的玉蘭樹,盡管每次實驗都盡量選擇在無風天氣下進行,但實際上很難保證完全無風。葉片受氣流的影響遠大于人所能感知的程度,即使是細微的氣流擾動,也會造成葉片的上下漂移,反映在點云上便產生了“厚度”,使得葉傾角點云計算誤差變大。
受限于激光雷達自身穿透力不強的性質,在葉片密集或樹冠內部區域,較難獲取到完整的點云數據。因此,本文中獲取的實驗數據只反映了大部分被采樣冠層區域的葉傾角分布特征。該影響同樣表現在樹冠上層信息的獲取上。因為環境限制,采集數據時不可避免會受到周圍樹木遮擋,并且距離較遠,最終造成樹冠上層點云密度明顯小于中下層。當點云密度較小時,勾繪葉片需要的主觀判斷更為明顯,增加了結果的不確定性。
另外,雖然相比其他樹種,玉蘭葉片較為平整,但卷曲、彎折現象仍較為普遍。對于存在一定曲率的單個葉片來說,葉傾角反映的是平均傾角。通過點云擬合平面時,可以自動選擇均方根誤差最小的平面,進而根據法向量計算葉傾角。手工測量則需要人為判斷,并且不能觸碰葉片,還要滿足貼近葉片、保持垂直等測量條件。種種因素讓手工實測葉傾角始終是一種理論簡單,但操作困難且結果并不十分精確的驗證方法。
3.2 葉片上下傾問題
葉傾角定義為葉片平面與水平面的夾角,范圍從0°到90°。本文中的實驗數據也是在此定義下采集并分析的,然而在詳細描述不同物候期植株葉傾角變化過程中,此定義存在一定局限性。原因在于葉片有正反面之分,正面(上表面)葉綠素較多,用來進行光合作用;而背面(下表面)氣孔較多,用來控制水汽交換。葉片正面的不同朝向決定了不同傾斜方式對太陽光能的利用效率并不相同,以單個枝條的簡化圖示意(圖6(a)),左側上傾分布方式對于光能吸收效率低于右側下傾分布方式。
需要注意的是,前文提到的葉片向上生長和向下生長并不完全等同于產生不同光能吸收效率的上傾和下傾。向上生長和向下生長說明的是葉梢和葉基的相對位置,而對于整個植株來說,上傾和下傾需要通過觀察葉片正面是否朝向樹干中心軸來判斷。比如有些向上生長的葉片同樣產生了下傾的效果,如圖6(b)紅圈內所示。
利用植物葉片正面向上的特性,結合激光雷達獲取三維結構信息的優勢,提出一種應用于點云數據判斷葉片上下傾的通用方法:分離葉片點云,確定各個葉片距離樹干中心軸的最近點和最遠點,如果最近點垂直高度高于最遠點,則為下傾;反之則為上傾。隨著激光雷達硬件和算法的不斷完善,該方法可為實現激光雷達自動化區分并提取葉片上下傾角提供參考,并為葉片上下傾的深入研究奠定基礎。
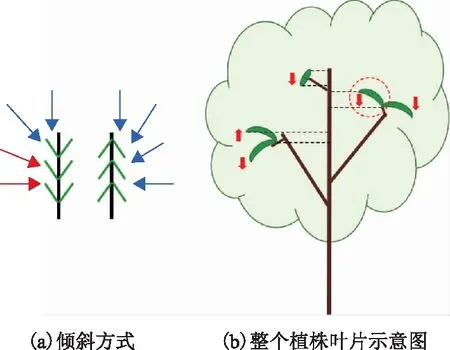
圖6 2種傾斜方式葉片示意圖
4 結束語
葉傾角分布作為關鍵的冠層結構參數,對植被冠層光線傳輸過程和光合有效輻射分布具有十分重要的影響。本文通過手持式激光雷達探究玉蘭不同冠層高度在不同時期的葉傾角分布變化規律,主要結論概括如下。
1)相比全方位掃描儀,手持式激光雷達配合SLAM算法在數據采集速度方面具有明顯優勢。雖然精度略低,但已可以基本滿足觀測葉傾角的要求。
2)玉蘭在葉片生長期(4—6月)受重力影響,上層樹冠平均葉傾角逐漸減小,下層逐漸增大,中層變化相對較小,整株平均葉傾角幾乎不變。
3)由于葉片正反面功能不同,相同葉傾角的上傾下傾朝向不同對于光合作用的影響也不相同。激光雷達具有自動化區分并提取葉片上下傾角的潛力。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00
