基于STC89C52單片機的多地形智能輪椅的控制設計
2020-12-04 07:48:58陳毅博
無線互聯科技 2020年16期
陳毅博
(華北電力大學 控制與計算機工程學院,北京 102206)
0 引言
如今,基礎公共設施越來越完善,人們的生活也越來越便利,但是很多歷史遺留的設施造成人機不和諧的問題依然存在,在一定程度上限制了行動障礙人士獨立出行,不利于社會主義和諧社會的發展。本設計在現有的可以爬平整樓梯的智能輪椅基礎上,對生活中更為復雜的地面情況進行數字化分析及處理,結合特定結構的底盤履帶模型來解決此類問題,以設計出可以應對更多復雜地形的多地形智能輪椅。
1 設計方案
鑒于在市面上現有履帶式爬樓輪椅爬樓的穩定性分析及非均勻樓梯上爬樓平穩性樣機試驗數據[1],并且考慮到輪椅的平穩性、舒適性和多用性的發展需求,本設計采用分段履帶與四輪相結合的方式,主要采用履帶式結構來應對地形的變化,簡化模型為履帶小車,平地四輪結構采用現已有輪椅結構即可。為應對多變化地形,硬件方面,設計了一種3段履帶式結構,盡可能加大對地形的適應能力和對智能軟件的容錯能力,攀爬時,調整輪椅背面前進方向,手動啟動攀爬模式即可。軟件方面,采用成本較低、操作較為簡單的STC89C52單片機作為主控芯片,利用超聲波傳感器、紅外傳感器對地形的關鍵數據進行測量分析,維持自身穩定性與安全性。
2 硬件設計
2.1 底盤模型
本輪椅底盤分為前中后3段,前后兩段相互對稱。前后兩個端點處設有方便攀爬的梯形探手構造,加強穩定性。測算估計出大體中段履帶的長度,并結合內部螺釘等有關結構,最后測算出每段長為479.2 mm,具體結構參數如圖1所示。為提高裝置在階梯上的穩定性,前后兩端探手角度采用普遍的梯形端設計[2],前后兩段長度較中段有所縮短,整個底盤模型長1 159.08 mm,具體數值如圖2所示。在普通平地地形上時,后端履帶向上緊靠輪椅后背,縮短體積,減少輪椅的空間占用。在準備攀爬時,用背面的后端探手搭上第一個階梯,完成初始準備操作。
2.2 準備模塊
準備模塊分為測算、鑒定兩項操作。測算是通過超聲波傳感器[3]和紅外傳感器來判斷裝置自身相對于地形障礙所處的位置,然后通過鑒定操作來決定是否需要通過移動輪椅來保證輪椅的安全和準備的成功。
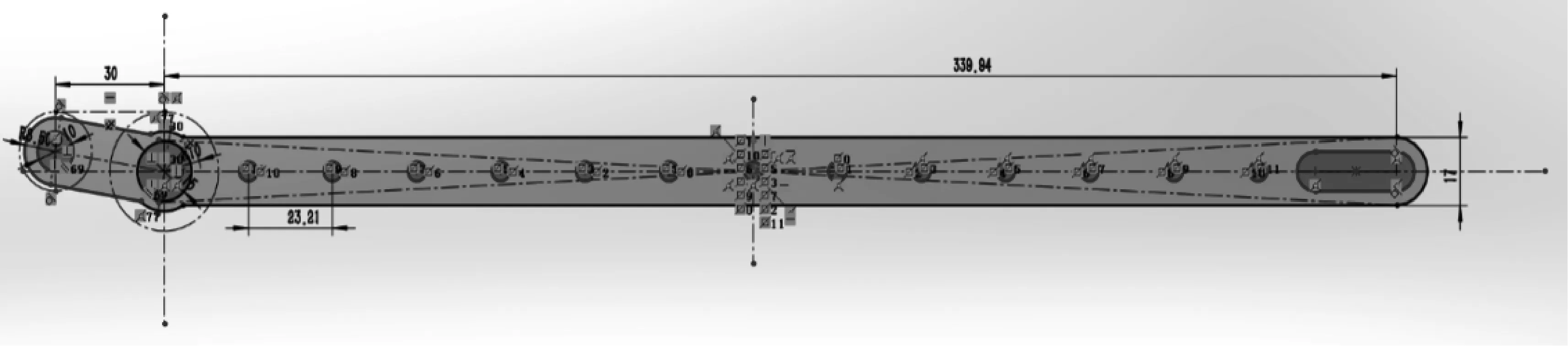
圖2 前后段外板結構
2.2.1 測算操作
為確保裝置能夠順利進入準備姿態,需要測量出裝置后底部據第一階右上角的距離,HC-SR04超聲波模塊感應角度不大于15°,探測距離為2~450 cm。其采用IO觸發測距,觸發信號大于10 us的高電平信號,并且模塊自動會發送8個40 kHz的方波,自動檢測是否有信號返回,若有信號返回,通過I/O輸出一高電平,高電平持續的時間就是超聲波從發射到返回的時間,通過公式計算得出水平距離[2]。
測試距離 =[高電平時間×聲速(340 m/s)] /2
E18-D80NK紅外光電傳感器為NPN型光電開關,它集信號接收與發射于一體,檢測距離為3~80 cm,直接為數字量輸出,不需要使用ADC信號轉換。使用方便、成本低、容易安裝、不易受到日常光源的影響,比較適合本設計使用[4]。紅外測距傳感器有一對紅外信號發射與接收二極管,紅外測據傳感器發射一束紅光,經物體反射接收,利用信號發送與接收的時間差,處理后獲得物體的距離[5]。

2.2.2 鑒定操作
首先,裝置測算出距離l,x后,需要由軟件程序鑒定弦l長度是否合適及后段履帶能否順利搭上階梯,如圖3所示。其次,通過超聲波傳感器判定是否處于安全合適位置,鑒定模塊軟件流程如圖4所示。
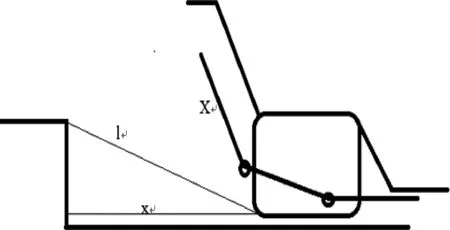
圖3 測算后鑒定狀態

圖4 鑒定模塊程序軟件流程
2.3 自檢模塊
當裝置完成準備模塊時,需要將兩段的履帶自我檢查是否已達到往下轉動的角度,并且將一直持續在輪椅攀爬運動過程中,確保裝置的安全和穩定。在本輪椅的前后兩段各適配一個紅外光電傳感器,可以檢測前后是否達到地形表面[6]。當前后兩端的紅外傳感器檢測到距離小于履帶前或后長度時,其信號端會輸出信號0,單片機I/O口會收到電壓信號,程序判斷單片機會控制裝置是否繼續驅動前進。
2.4 驅動模塊
驅動模塊L298為高電壓、高電流、四通道驅動,可接收DTL或者TTL邏輯電平,驅動感性負載和開關電源晶體管。L298N可直接對電機進行控制,無須隔離電路,可以驅動雙電機。當使能端為高電平時,輸入端IN1為PWM信號,IN2為低電平信號時,電機正轉;輸入端IN1為低電平信號,IN2為PWM信號時,電機反轉;IN1與IN2相同時,電機快速停止。當使能端為低電平時,電動機停止轉動[5]。
3 軟件設計
由于輪椅的特殊性,需要考慮裝置的安全性和穩定性,隨時利用自檢模塊對裝置自身進行檢查,來確定自身的安全性、穩定性。當輪椅啟動攀爬程序后,整個控制系統由供電模塊進行供電,單片機開始執行預設程序,進行各個模塊的初始化操作。由準備模塊開始負責輪椅最佳起手運行姿態,經過AD轉換,單片機將得到開啟攀爬模式時裝置離第一階的階棱的距離l,經程序把l與固定值X(在探手長度30 mm范圍內)比較,當大于X時,單片機會控制向后前進,由超聲波傳感器來傳遞移動值給單片機,直到移動值在15 mm左右時停止;當小于(X-30)mm時,會向前倒退15 mm,與上相同,移動后返回上一步測算操作,即重新初始化紅外傳感器數值與其所在角度,得到l1,繼續判定循環,直到ln滿足條件。若一開始滿足條件則繼續向下執行自檢模塊。準備結束后,單片機將得到程序指令開啟定時器,在第一秒時執行自檢模塊,開啟前后紅外傳感器,再經過AD轉換得到距離y1,y2當y1 本設計實現了對輪椅為適應多變地形的智能控制,硬件方面利用獨特的3段履帶式結構,大大減少了地形對用戶的危險,增加軟件的容錯率并簡化了操作;軟件方面輪椅能夠讓用戶切換攀爬模式,在攀爬模式下可以利用每一秒運行的自檢模塊時刻最大化地保證用戶的安全,為多地形智能輪椅的發展提供了更為實用的方向。4 結語
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
中國生殖健康(2019年3期)2019-02-01 06:12:26
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年19期)2017-02-02 07:08:27
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00