針對間隙非線性環節的水輪機調節系統穩定性分析
2020-12-02 07:53:25廖溢文楊威嘉趙志高李旭東慈曉虎楊建東
水利水電快報 2020年8期
廖溢文 楊威嘉 趙志高 李旭東 慈曉虎 楊建東


摘要:間隙環節是機械系統中典型的非線性環節,亦存在于水輪機調節系統中;隨著水輪發電機組服役年限的增加和執行機構的老化,間隙特性的影響也愈加明顯。推導了孤網運行工況下水輪機調節系統各部分的傳遞函數,運用描述函數法表示系統執行機構內的間隙特性,建立了具有間隙非線性環節的水輪發電機組模型。通過理論分析,基于Nyquist穩定判據分析了間隙特性對系統穩定性特征的影響,并采用時域數值仿真,模擬了在頻率調節模式下負荷擾動的小波動過渡過程。結果表明:間隙特性能使機組瞬態性能惡化,甚至使系統產生極限環振蕩,系統穩定性特征受到間隙死區大小、間隙特性與調速器參數匹配規律等因素的影響。分析結果可為具有典型間隙非線性環節的水輪機調節系統小波動穩定運行提供理論支持。
關鍵詞:水輪機調節系統;間隙非線性環節;穩定性;Nyquist穩定判據;極限環
中圖法分類號:TK73
文獻標志碼:A
DOI: 10.15974/j.cnki.slsdkb.2020.08.007
1 研究背景
作為電力系統調峰調頻的骨干電源,水電站在一個合理的能源結構中占據不可或缺的地位。然而,水電站水輪機調節系統的時變、非線性、非最小相位等特點[1-2]使其調節過渡過程中的安全穩定性問題尤為突出,直接影響到電網安全及網源協調[3-4]。
水輪機調節系統是水機電多子系統耦合的非線性復雜系統[5],確保其運行穩定性及具備良好的調節品質是水電站引水發電系統設計中一項傳統且重要的課題[6-8]。文獻[9]指出基于非線性水輪機模型的調節系統是研究水力系統與電力系統相互作用的最精確模型。雖然在小波動情況下,可以將系統簡化為線性處理[10]剛,但在特定工況下,系統的某些非線性因素仍然有可能影響到整個水輪機調節系統的性能和動態品質。對于系統中非線性特性引發的混沌現象,前人已開展了許多研究。文獻[11]引入水輪機非線性傳遞系數,綜合分析了水輪機調節系統參數變化時系統的非線性動力學行為特性。文獻[12]考慮了彈性水擊效應的影響,建立了水輪機調節系統的非線性模型并進行了理論分析。文獻[13]通過非線性建模與分析,對水電站中所觀察到的持續振蕩現象給出了一種可能的理論解釋。文獻[10]說明了線性化系統的穩定參數中一定包含了令非線性系統強穩定的控制器參數。
針對具體的非線性環節,文獻[14]指出在水力發電系統瞬態過程中,機械系統內傳動機構的非線性響應不利于水力發電系統的運行穩定性。文獻[15]分析了小波動情況下限幅死區和轉速死區對水輪機調節系統動態過程的影響。文獻[16]考慮了飽和特性的非線性動力學行為,對水輪機調節系統的分叉現象進行了分析。已有研究成果為非線性水輪機調節系統的控制器參數整定及穩定運行提供了理論依據。間隙環節是各類機械系統中典型的非線性環節[17],亦存在于水輪機調節系統中。隨著水輪發電機組服役年限的增加和執行機構的老化,間隙特性的影響也愈加明顯。然而,針對執行機構內間隙特性對系統影響的研究還相對較少,特別是從理論角度進行的定量分析仍需進一步展開。
本文以孤網運行的PI型水輪機調節系統為研究對象,在小波動條件下,通過數學建模、理論分析和仿真模擬相結合的方法,對考慮存在間隙非線性環節的系統進行了動力學特征和穩定性影響因素的研究。結果表明:間隙特性會使系統調節過渡過程性能惡化,但當間隙特性與調速器參數之間滿足一定的匹配規律時,系統能獲得較好的動態特性。
2 方法與模型
2.1 線性水輪發電機組模型
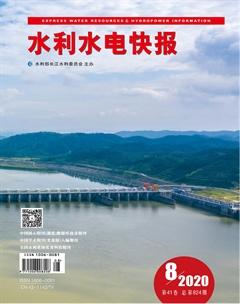
本文的研究對象是帶有執行機構間隙的PI型水輪機調節系統,采用該調節系統的水輪發電機組框圖如圖1所示。為了便于對非線性系統進行研究,通常可將閉環系統視為非線性環節與線性系統相串聯的形式[18-21]。首先建立線性水輪發電機組模型,其各部分數學模型由下文中的等式描述。
在小波動過渡過程分析計算中,通常采用的是頻率調節模式[12]。在頻率調節模式下的PI型調速器傳遞函數Ge、引水管道傳遞函數Gh、水輪機及引水系統傳遞函數Gt分別為
式(6)為機組綜合自調節系數的含義;式(7)為系統總傳遞函數,該式表示的系統框圖可表示為圖2;式(8)為式(7)的傳遞函數表達式。
2.2 間隙非線性的描述函數表示
描述函數法主要用以分析無外作用情況下非線性系統的穩定性和自振蕩問題[23]。運用描述函數法分析非線性系統時應滿足以下應用條件[18.24]:①系統能簡化成一個非線性環節和一個線性閉環系統連接的典型結構形式;②非線性環節具有時不變性且非線性特性關于原點對稱;③系統的線性部分具有較好的低通濾波性。分析可知,具有間隙環節的水輪機調節系統滿足以上應用條件[25]。
間隙環節具有如下的輸入輸出關系:當輸入量的方向改變時,輸出量保持不變,直到輸入量的變化超出一定的數值(間隙)后,輸出量才跟著變化[26]。間隙特性具有非光滑、局部記憶和多值映射的特性[27],如圖3所示。間隙特性的數學描述如式(10)所示[28]。
由上述推導可知,圖1所示考慮間隙特性的水輪發電機組可化簡為圖4中帶有描述函數環節的形式。
3 帶間隙環節水輪機調節系統穩定性研究
本節將采用上文建立的水輪發電機組模型,研究考慮了執行機構間隙的水輪機調節系統的穩定性特征。
3.1 參數設置和工況選擇
表1為我國一大型水電站的主要參數值。在表1主要參數值條件下,線性部分開環傳遞函數G。(s)如式(14)所示,其中C1-C8為常數,可知G。(s)取決于調速器參數。
將選取使系統穩定、不穩定和處于臨界穩定狀態附近的3組調速器參數進行分析,3組調速器參數的取值見表2,其相對位置見圖5。針對每一組調速器參數設計不同的間隙特性如表3所示,使系統具有不同的開環傳遞函數。
3.2 穩定與失穩狀態下間隙特性影響
當調速器參數設置取組合1(Kp=4.0,K=0.5)和組合2(Kp=5.0,Ki=2.0)時,此時距穩定域邊界較遠。當調速器參數設置為組合1,表明穩定狀態下的水輪機調節系統具有較大的穩定裕量;當調速器參數設置為組合2,系統將處于不穩定的狀態。表3中工況1~6的Nyquist曲線ΓGH和一1/N(A)曲線如圖6所示,雖然式(14)存在一個積分環節,但其Nyquist曲線對本系統分析沒有影響,故補充的虛線在本文圖中均不予顯示。根據Nvquist穩定判據,由圖6可知,工況1~6的Nvquist曲線ΓGH與曲線一1/N(A)不存在交點,可以判斷系統將處于恒為穩定或恒為不穩定的狀態。圖7和圖8分別為在頻率調節模式下,工況1~3和工況4~6情況下系統在10.0 s時發生有功功率2.5%階躍變化的時域數值模擬響應曲線。當調速器參數取組合1(即工況1~3)情況下,系統在受到擾動后很快趨于穩定;當調速器參數取組合2(即工況4~6)情況下,系統逐漸發散。理論分析和時域數值模擬實現了良好的一致性。仿真結果表明:無論是處于穩定工況還是不穩定工況下,水輪機調節系統中的間隙特性會使系統的超調量變大,振蕩持續時間延長,并發生相位滯后,而且隨著間隙死區的增大,系統的調節性能會進一步惡化。
3.3 臨界穩定狀態附近的間隙特性影響
當調速器參數設置在穩定域邊界附近,即調速器參數取組合3 (Kp= 3.0,Ki= 1.2)時,表3中工況7~9下的Nyquist曲線1-GH和曲線-1/N(A)如圖9所示。
根據Nyquist穩定判據,在沒有間隙存在(即間隙死區b=0)時,FGH不包圍穩定點(一1,j0),此時系統穩定,與運用Hurwitz穩定判據判別結果一致。由圖9可知,當間隙死區逐漸增大,-1/N(A)曲線將大致沿著原來方向不斷延長,并會與Nyquist曲線1-GH相交于交點N1,此時系統將由穩定狀態變為不穩定狀態,并在N1點發生自激振蕩,即存在一個極限環,交點的幅值為A1,頻率為ω1。對系統進行時域數值模擬,在頻率調節模式下,使系統在10.0 s時發生有功功率2.5%的階躍變化,可繪制出圖10-11。圖10是工況7~9下的時域模擬響應曲線,圖11是系統狀態在頻率一開度平面上投影的相平面圖。由圖10可知,隨著間隙死區從0逐漸增大,系統將由穩定狀態向不穩定狀態發展,最終演變為持續等幅振蕩,振蕩幅度和相位滯后程度隨間隙死區逐漸加大。圖11清晰地顯示了系統中存在的極限環,隨著間隙死區的增大,系統極限環也不斷增大,極限環中的水平區段體現了系統間隙在執行機構換向時的局部記憶性特征。
由圖9可知,隨著負荷擾動幅度增大,-1/N(A)曲線將由被1-GH包圍的不穩定區域進入到1-GH之外的穩定區域,可以判斷系統在N1點存在的極限環是一個穩定極限環。
圖12是工況9(6=±0.5%,K=3.0,Ki=1.2)所對應的仿真結果,虛線表示系統減2.5%負荷時的時域響應,此時外界負荷擾動相對較大,大于A1,孤網水電站頻率振幅將在初始發散后不斷減小,最終穩定在[0.995,1.005] (pu)區間內振蕩;實線表示系統甩0.1%負荷時的時域響應,此時外界負荷擾動相對較小,小于A1,系統頻率振幅將逐漸增大,最終也穩定在[0.995,1.005] (pu)區間內振蕩。圖13為系統狀態在頻率一頻率的一階導數相平面上的投影,清晰地顯示了系統存在一個穩定極限環,環內外的軌跡均收斂于該極限環上,系統發生等幅振蕩現象。倘若合理選取調速器參數(如組合1),則能夠避免發生此類現象。
4 結論
本文運用描述函數法表示間隙非線性環節,建立了具有間隙環節的水輪發電機組的傳遞函數數學模型,運用Nyquist穩定判據對系統動力學行為進行分析,研究了間隙特性對水輪機調節系統穩定性的影響。得出以下結論:
(1)間隙特性使機組調節過渡過程性能惡化,其影響程度與間隙死區大小成正相關。
(2)間隙特性能使系統產生極限環,通過理論推導和分析找到了極限環特性與調速器參數的關系。可通過使間隙特性與調速器參數滿足一定的匹配規律消除極限環。
本文對考慮了執行機構間隙特性的水輪機調節系統的小波動穩定特征進行了初步研究,進一步驗證了間隙死區、調速器參數等因素對系統穩定性的影響,為水輪發電機組穩定運行提供了理論支持。
參考文獻:
[1]殷豪,孟安波,陳德新.S函數在水輪機非線性動態建模中的應用研究[J].華北水利水電學院學報,2003,24(4):38-40.
[2]趙志高,楊建東,楊威嘉,等.抽水蓄能機組電路等效實時精細化模型研究及應用[J].水利學報,2019,50(4):475-487.
[3]路曉敏,陳磊,陳亦平,等,電力系統一次調頻過程的超低頻振蕩分析[J].電力系統自動化,2017,41(16):64-70.
[4]程春田,勵剛,程雄,等.大規模特高壓直流水電消納問題及應用實踐[J].中國電機工程學報,2015 (3):549-560.
[5] 魏守平.水輪機調節系統一次調頻及孤立電網運行特性分析及仿真[J]水電自動化與大壩監測,2009,33(6):27-33.
[6]俞曉東,張健,劉甲春.聯合運行水電站水力機械系統小波動穩定性研究[J].水利學報,2017,48(2):234-240.
[7]Kishor N, Saini R, Singh S.A review on hydropowerplant models and control[J]. Renewable&SustainableEnergy Reviews, 2007( 11): 776-96.