虛擬多觸角探測的高超聲速滑翔飛行器再入機動制導
2020-12-01 07:15:54高楊蔡光斌徐慧楊小岡張勝修
航空學報 2020年11期
高楊,蔡光斌,2,*,徐慧,楊小岡,張勝修
1.火箭軍工程大學 導彈工程學院,西安 710025 2.西北工業大學 航天學院,西安 710072
近年來,高超聲速滑翔飛行器的再入機動制導過程受到各個軍工大國的高度關注,其制導性能也是各大科研機構研究的重點[1-8]。高超聲速滑翔飛行器一般以一定的彈道為基礎在再入階段進行制導,制導過程中受到多種約束的限制,除去飛行任務限定的始末端點約束外,還有傳統路徑約束和空間約束。
傳統路徑約束包括熱流率約束、動壓約束和過載約束。在離線的狀態下,目前已經有很多成熟的算法,其中,以高斯偽譜法為代表的數值優化求解方法已漸趨成熟,可以在滿足以上約束條件的情況下,求解出不同優化目標的最優軌跡[9-13]。另一部分學者針對準平衡條件的“軟約束”提出了飛行通道的研究思路,能夠將多維優化問題簡化成一維搜索問題[14-18]。其中Harpold與Graves對Space Shuttle飛行器提出了阻力-速度飛行通道[1],飛行通道上限由3種傳統路徑約束計算得出,下限由準平衡條件計算得出。Roenneke和Markl針對飛行器能量這一變量,提出了阻力-能量通道[14]。而后,這種制造飛行通道所使用的剖面方法被展開研究,出現了速度-高度剖面、速度-航跡角剖面等剖面方法,用以形成不同性能的飛行通道[15-18]。現階段的高超聲速滑翔飛行器設計再入過程制導律時,多是在標準軌跡的基礎上,通過預測反饋的結果,在飛行通道內搜索并調整控制指令,跟蹤最優軌跡的動力學剖面。但是,高超聲速滑翔飛行器在通道中飛行時,機動性會受限,在面對諸如禁飛區和路航點等多變空間約束環境時,有可能出現任務失敗的情況。
為了減少對標準軌跡的依賴,部分學者探索了離線彈道庫的方法和在線優化軌跡方法以解決飛行中復雜多變的環境問題與標準軌跡的較大偏移問題[19-21]。其中,離線彈道庫的方法雖然能夠大幅度減少飛行時的計算量,但是飛行器在空域內遇到的情況復雜多變,離線彈道庫的方法本身存在一定的漏洞;而以偽譜法和凸優化方法為代表的最優軌跡求解方法,雖然能夠求解出較為精確的優化軌跡,但是隨著軌跡精度的提高以及約束復雜性的增加,求解優化軌跡的計算量將變大,而高超聲速滑翔飛行器具有飛行速度大、狀態變化快等特點,離線的軌跡優化方法很難實現在線的高精度軌跡優化,尤其是優化出的橫向剖面控制指令連續多變,不利于高超聲速滑翔飛行器這種強非線性系統的控制[22-23]。
考慮路航點約束的軌跡優化研究通常應用于無人機等低速飛行器,但是考慮到實際的位置匹配和導航需求,路航點約束也被應用到了高超聲速滑翔飛行器的任務規劃中[24]。而隨著各國反導系統以及航空識別區的建立,禁飛區(No-Fly Zones,NFZ)約束也成為研究中不容忽視的考慮因素。目前大多數針對禁飛區約束的研究多是在離線狀態下用已知的禁飛區信息求解軌跡優化的最優解。當遇到多變的禁飛區時,也有研究人員基于鄰域控制的方法略微改變控制變量進行規避[25]。這類研究雖能解決部分禁飛區問題,但是針對的都是禁飛區信息已知的情況,并且要在離線狀態下或者在機動制導交接點前計算軌跡,當禁飛區較小且移動速度較快或者禁飛區分布較為復雜時,這類方法的計算時間會變長且計算精度低,可靠性變差[26-29]。
近年來,部分學者應用生物學中的觸角方法對高超聲速滑翔飛行器的探測反饋再入制導進行了探索與改進[3-4,30]。基于觸角的探測反饋方法首先應用在機器人的路徑規劃中,通過濃密的觸角覆蓋周圍區域并探測周圍地形[31-32]。高超聲速滑翔飛行器制導策略若采取濃密的觸角探測反饋,計算時間過長,無法應用于機動制導中的精細計算。梁子璇等在觸角末端威脅評估方法的基礎上探索了基于雙觸角探測的傾側角逆轉制導策略[3-4,30]:在禁飛區信息未知的情況下,僅僅判斷觸角末端的禁飛區情況,結合航向角約束,通過實時獲得觸角的剩余地面距離和時間,計算2個方向觸角的威脅程度,選擇較為安全的方向進行機動制導,并采用不同的禁飛區模型進行了方法的實用性和魯棒性檢驗。在這一基礎上,文獻[3]與文獻[4]增加前向飛行的觸角探測,并將航向角約束的計算方法進行改進,同時使用傾側角轉換延時濾波器,討論了多禁飛區約束情況,減少了傾側角的轉換次數,增加了飛行器無橫向機動飛行時間在總飛行時間的比例。文獻[4]中,增加了基于相鄰時刻觸角信息的實時識別禁飛區動態的預警區域模型,針對跟蹤型禁飛區情況進行了仿真實驗。但是,這類觸角方法在飛行器再入飛行的初始階段時用于探測的觸角長度比后期觸角長度大很多,在計算耗時上遠大于后期觸角探測過程,影響飛行器再入初期階段的機動性能。
綜上所述,當前的關于高超聲速滑翔飛行器的機動制導研究雖然相對全面,但是在禁飛區信息未知情況下進行機動制導的觸角方法仍有不足。為此,本文在速度-航向角約束的基礎上,改進成為速度-剩余地面距離-航向角約束,并且采取雙模式多觸角探測反饋的方法進行機動制導策略的設計。一方面通過多觸角粗略預測的結果快速獲得臨時目標點;另一方面,在臨時目標點的基礎上基于三觸角的精細預測進行機動制導,并在多禁飛區模型和禁飛區通道模型情況下進行了仿真實驗,仿真結果表明,該方法對于高超聲速滑翔飛行器的再入機動制導過程有指導意義。
1 高超聲速滑翔飛行器再入過程建模
1.1 高超聲速滑翔再入飛行動力學模型
針對高超聲速滑翔飛行器的再入過程,忽略地球自轉角速度的影響,在地心赤道旋轉坐標系內,建立以下動力學模型[33-35]:
(1)

(2)

(3)
(4)
(5)

(6)
式中:r為飛行器的地心距;V為飛行器的地球相對速度;ψ與γ分別為飛行器的航向角與航跡角;飛行器所處的經度θ和緯度φ是判斷飛行器路徑約束的主要因素;m和g為飛行器的質量和當前地心距的重力加速度;飛行器的傾側角σ與攻角α分別控制飛行器制導策略中的橫向、縱向制導剖面;D=ρV2SrefCD/2與L=ρV2SrefCL/2為飛行器在飛行過程中的氣動阻力與升力,其中ρ為飛行器當前高度的空氣密度,Sref為飛行器的參考橫截面積,CL與CD分別為與飛行器攻角有關的空氣動力學參數。
不同的高超聲速飛行器可根據飛行試驗和參數辨識來獲得不同的空氣動力學參數,本文選用Common Aero Vehicle-HPMARV(CAV-H)高超聲速滑翔飛行器作為研究對象,該飛行器的空氣動力學參數來源于文獻[33]與文獻[35]。
1.2 常規約束與禁飛區約束
高超聲速滑翔飛行器在臨近空間的飛行過程中,要面臨多種約束的限制。本文中CAV-H沿標準軌跡規避禁飛區進行機動制導,主要考慮飛行器飛行任務中的始末兩端的端點約束以及多種路徑約束。始末兩端的端點約束是根據任務條件給出的,其中初始端點約束是任務的初始狀態,也是生成的標準軌跡和機動制導的開始狀態。令X=[r,θ,φ,V,γ,ψ]T為飛行器狀態矩陣,εX為較小的常值矩陣,維數與X相同。終端約束模型為
(7)
式中:上標i表示矩陣第i個元素;下標f代表終端狀態;tf表示終端時間。εX越小,飛行器標準軌跡與機動制導的終端狀態越接近任務的終止狀態,機動制導的結果越精確。
常規路徑約束,包括熱流率約束、過載約束和動壓約束,其數學模型分別為[36]
Q=KQρ0.5V3.15≤Qmax
(8)
(9)
(10)

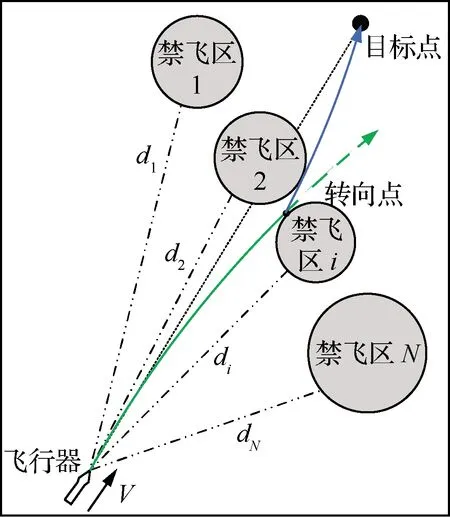
圖1 多圓柱形禁飛區模型Fig.1 Multi-cylinder no-fly zone model
本文中的禁飛區均考慮為垂直于地球表面的柱形禁飛區,其橫截面可以是不同的形狀。假設禁飛區有N個,如圖1所示,飛行器距離第i個禁飛區邊界的最小距離為di(i=1,2,…,N),當飛行器在禁飛區外,di為正,如果存在di不為正,則飛行器沒有成功規避禁飛區。因此,高超聲速滑翔飛行器應根據飛行任務及時轉彎并規避禁飛區。
1.3 航向角約束
在飛行器機動制導過程中,采用航向角約束可以避免飛行器機動后無法到達任務目標。飛行器要根據其在機動過程中的速度和剩余地面距離來確定這種約束,使得飛行器能夠有足夠的距離通過對傾側角和攻角的控制,把飛行器制導到終點或者臨時終端位置。在基于觸角探測反饋的傾側角橫向瞬變制導策略中,任務目標僅僅是最終位置,只需要速度這一種變量作為航向角約束的參考值。本文考慮加入與飛行器距離較近臨時路航點,減少探測反饋時間,因此將距離終點或者臨時路航點的剩余地面距離也作為航向角約束的參考變量。
首先,將航向角約束定義為在經緯平面中飛行器當前位置指向目標點的向量與飛行器初始位置指向目標點向量的夾角,如圖2所示。然后,求出飛行器在滿足初始任務中速度、高度條件下的最大轉彎軌跡,在該軌跡上求出各個軌跡點Pj(j=1,2,…,m)的速度、方向、位置與剩余地面距離。令軌跡點到終點連線與速度方向的夾角Ψi(i=1,2,…,m)為當前航向角誤差,順時針為正方向,即
Ψi=|ψi+arctan((θi-θf)/(φi-φf))-π/2|
(11)
式中:θi、φi和ψi為當前軌跡點Pi位置的經緯度坐標和航向角;θf、φf為終點的經緯度坐標。最后,航向角誤差與速度、剩余地面距離的關系如圖3中所示。其中,航向角誤差為飛行器實時位置的航向角與初始航向角之間的偏差。
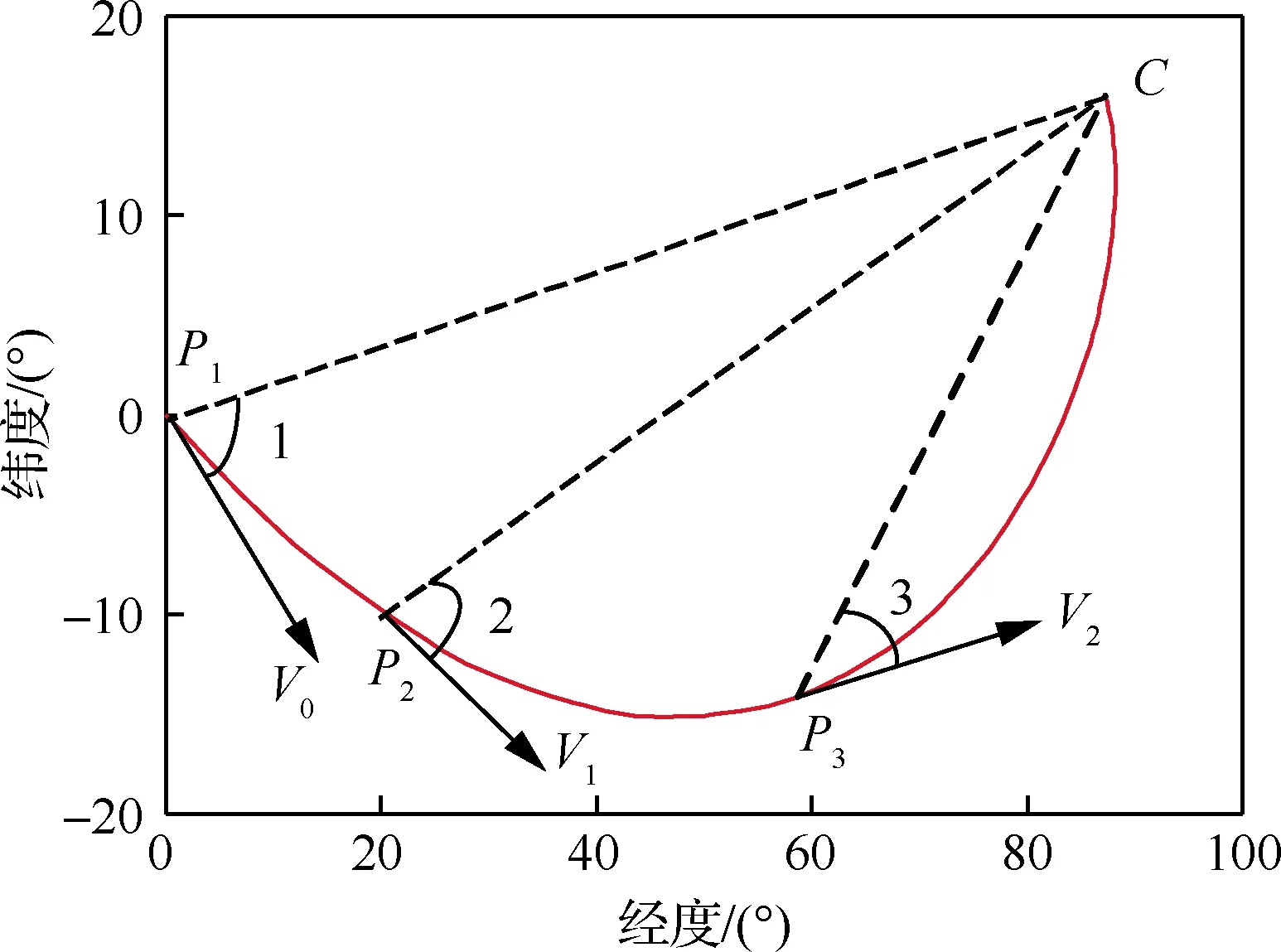
圖2 飛行器最大轉彎軌跡Fig.2 Maximum turning trajectory of vehicle

圖3 航向角誤差約束Fig.3 Heading angle error constraint
2 基于觸角的探測反饋模型
本文在研究禁飛區條件下飛行器機動制導前,通過高斯偽譜法在沒有禁飛區的條件下獲得最優路徑[37-38],之后根據最優路徑的信息在滿足其他路徑約束的情況下規避禁飛區,機動制導到終點區域。首先建立基于多觸角的分段定點探測反饋機制,之后根據多觸角的反饋,實現臨時終端點的確定,最后在分段制導的過程中,采取基于三觸角的探測反饋機制進行機動制導。在基于觸角的探測反饋機制中,按方向劃分制導策略,分為縱向制導策略和橫向機動制導策略,縱向制導策略通過線性二次調節器(Linear Quadratic Regulator, LQR)方法實現,橫向機動制導策略由基于多觸角探測的傾側角瞬變制導方法實現。
2.1 基于LQR方法的縱向跟蹤制導策略
由于標準軌跡是由高斯偽譜法等優化方法得到的時間上不等間距的狀態點,在實施LQR方法跟蹤標準軌跡時,在時間軸上,第i時刻要跟蹤的第(i+1)時刻的狀態,必須要提前計算出第(i+1)時刻的狀態。為此,就要將標準軌跡的狀態信息進行線性差值,獲得一系列等間距的狀態點。令飛行器在標準軌跡中距離出發點的經緯度距離為線性化過程中的自變量,由于標準估計沒有進行機動,航向角不變,因而線性化的狀態信息只有[>r,V,ψ]T3個變量,最后根據經緯度距離最近的兩個標準軌跡點對該經緯度距離的狀態進行線性化估計,即
(12)

Δαi=K(s)(Xi-Yi)
(13)
式中:K(s)由LQR算法求得;Δαi為實時求得的第i時刻的攻角變化量。
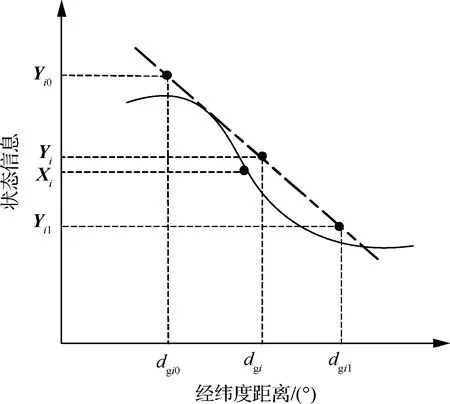
圖4 第i時刻狀態變量線性化Fig.4 Linearization of state variable at i th moment
2.2 觸角的產生與停止
在高超聲速滑翔飛行器沿標準軌跡進行機動制導的過程中,前方路徑中的禁飛區約束情況是未知的,同時由于機動制導帶來的常規路徑約束是否超出限值也是未知的,因此需要產生多個觸角對前方路徑進行探測。而后,飛行器在觸角探測反饋后會根據觸角終點的信息選擇其中一個觸角進行跟蹤飛行。
所有的探測觸角均采用同一方法產生,每一個觸角擁有不變的傾側角,每一個觸角的出發點是一致的,假設飛行器處于第i時刻,以當前控制指令仿真積分一個時間步長ΔTLat后,令積分后的第i+1時刻的狀態為預測起點,當這一預測周期結束、獲得相應的信息并計算出控制指令后,飛行器也剛剛飛至第i+1時刻的狀態,由于積分時間步長固定且較小,預測起點與實際狀態誤差較小,并且在飛行過程中,這一極小的誤差可以由2.1節中的跟蹤制導模型彌補。每個觸角的終止條件如下[4,30]:
C1:觸角的積分時間與已飛行時間之和超過任務最大飛行時間,本文最大任務時間設為3 000 s。
C2:存在觸角末端在任意禁飛區邊緣或者內部。
C3:存在觸角上的狀態信息經過計算后超出了熱流率約束、動壓約束和過載約束3個路徑約束的最大值。
C4:觸角的末端超出了根據速度或剩余地面距離獲得的航向角限制。
C5:觸角末端到達終端區域。
其中,前4個條件屬于禁忌條件,飛行器的機動制導過程都應避免沿著這4種條件的觸角飛行,而C5屬于容許條件,飛行器在規避禁飛區并且滿足其他路徑約束條件時要盡量選擇這種觸角。
3 雙模式的觸角探測反饋制導策略
在高超聲速滑翔飛行器機動制導過程中,如果只有一個距離較遠的終點,飛行器若使用2個或者3個觸角實時探測前方未知情況,初始階段計算耗時較大。為了降低初始階段的觸角探測耗時,采用2種觸角探測模式:① 多觸角大積分步長的粗略探測,進行總任務的分段定點,得到臨時路航點;② 三觸角小積分步長精細探測,用于分段后指向臨時路航點的機動制導,兩種方法在飛行器沿標準軌跡制導的過程中同時進行。
3.1 觸角探測中的多觸角粗略探測定點策略
圖5為多觸角探測臨時路航點的示意圖。飛行器在O點發出多條紅色的大步長觸角進行探測,判斷觸角狀態后,最終選擇綠色的觸角末端作為臨時路航點。
圖6為多觸角探測臨時路航點獲取的流程圖。首先要使用大步長的多觸角進行探測,令飛行器從出發點開始以時間為預測周期,產生p條大步長觸角,第k條觸角的傾側角為
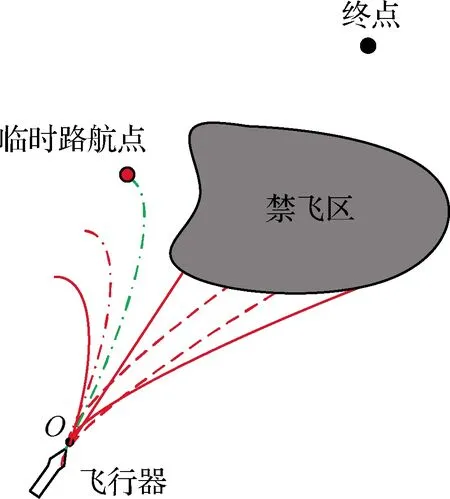
圖5 多觸角臨時定點策略Fig.5 Multi-tentacle temporary fixed point strategy
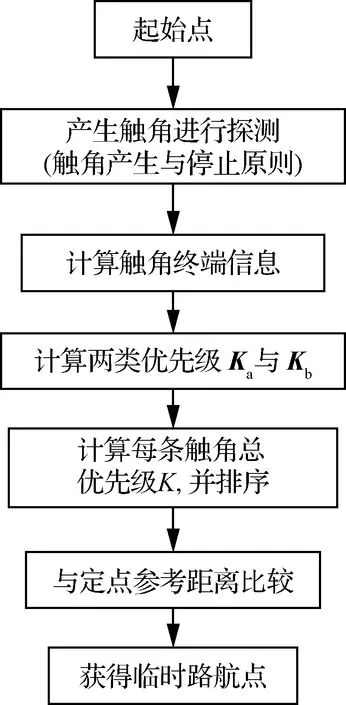
圖6 多觸角臨時路航點獲取Fig.6 Multi-tentacle temporary waypoints acquisition
σk=-σmax+2σmax(k-1)/(p-1)
(14)
式中:σmax為傾側角最大值。當預測的觸角停止后,得到所有觸角的停止條件集合和停止端點的狀態信息。參考優先級計算方法,計算停止優先級矩陣Ka和末端狀態優先級矩陣Kb[4]。
令5種停止條件的停止優先級矩陣Ka為[a1,a2,a3,a4,a5],第k(k=1,2,…,m)條觸角的停止優先級為Kak。然后,根據各個觸角的末端經緯度計算末端狀態優先級Kb,假設當前所有觸角的出發點經緯度為[φ0,ψ0],第k條觸角的末端經緯度為[φk,ψk],終點的經緯度為[φf,ψf],計算距離dgk:
(15)
之后,把所有觸角的dgk由小到大排列,按照大小順序分別賦予末端狀態優先級,形成的第k個觸角的末端狀態優先級Kbk分別為{b1,b2,…,bm}K=1,2,…,m將每一條觸角的兩種優先級做乘法,即總優先級為Kk=-KakKbk,通過比較所有的總優先級,得到應該選擇的機動制導傾側角,即
σ=σcKc=max(Kk)
(16)
Kmax=max{K1,K2,…,Km}
(17)
(18)
式中:σc為通過比較總優先級獲得的傾側角,c是當前預測周期內被選擇的那條觸角序號;Dc為被選擇的觸角的始末距離。
為保證總優先級合理,設置2種優先級矩陣Ka和Kb的關系式為
a2=a3>a4>a1>a5>0
(19)
0 (20) (21) 其中:式(19)與式(20)的下標分別代表禁忌條件編號和末端狀態優先級的從小到大賦值編號,并不代表觸角編號。式(19)強調的是Ka中禁忌條件與允許條件之間的關系;式(20)強調的是同一種停止條件下根據末端狀態的優先級關系,且所有元素小于1是保證Ka中較小的觸角不會因為Kb較大而總優先級小于Ka中較大的觸角;式(21)是為了優先考慮停止條件優先級,避免Ka中較為禁忌的觸角由于Kb較小而總優先級大于Ka中較小的觸角,ka代表產生上述可能的臨界值。本文選擇的Ka和Kb矩陣分別為[0.1,1,1,0.4,0.05]和bi=0.75+0.01i,其中i是Kb矩陣根據末端狀態優先級從小到大排列后的序號,滿足式(19)~式(21)的限制條件。 最后,設定分段定點模式中的地面距離固定為Dg。令Dg與Dc比較,如果Dg大于Dc,則選擇Dc所代表的位置為臨時路航點,即分段點;如果Dg小于等于Dc,選擇第c條觸角距離觸角出發點距離Dg的點為臨時路航點。由于觸角生成終止的規則中已經考慮到了多種典型的再入約束,如果生成的觸角不滿足再入約束,是不會引入到觸角探測候選的,因此得到的臨時航路點也能滿足再入約束。臨時路航點選擇后,將作為分段制導模式下的三觸角橫向探測反饋機動制導的臨時終點,即更換了2.2節中的觸角終止條件C5的終點,同時也改變了條件C4中參考剩余地面距離的航向角約束。 將3.1節中產生的臨時終點作為三觸角探測反饋的“終點”進行機動制導,當飛行器的經緯度位置與臨時終點的距離小于與任務終點的距離,則將任務終點作為機動制導終點直到最后,可以達到節省制導計算時間的目的。 首先,確定三觸角模式的預測周期T2,該模式下,預測時的積分周期遠小于多觸角探測定點模式,即三觸角模式下每一個預測周期只取3個觸角,并令p=3,他們的傾側角分別為[-σmax,0,σmax]。Ka和Kb矩陣分別為[0.1,1,1,0.4,0.05]和[0.75,0.76,0.77],滿足3.1節的優先級規則。 然后,在初步確定了第i個預測周期的傾側角σi后,為了避免經過此過程產生的傾側角在一段時間內產生高頻率的震蕩或者不必要的左右搖擺,引入延時濾波器如下[4]: σr= (22) 式中:T為延時濾波器的時間常數;σr為第i時刻最終輸出的傾側角值,濾波器從第(T+1)時刻開始工作,因此T選取的值過大會導致飛行器無法及時機動制導并規避約束,式(22)中的kσ為T的三分之一。 本文研究的飛行器是CAV-H,其質量為907.2 kg,氣動力橫截面積為0.484 m2,最大熱流率為4 MW/m2,最大動壓為60 kPa,最大過載為2.5g,其飛行任務數據如表1所示[4,30,40]: 為了驗證本文算法的適用性,首先在沒有禁飛區約束的情況下根據始末狀態設計標準軌跡,設計標準軌跡的過程中,控制飛行器橫向機動的傾側角為0,如圖7所示。同時,令飛行器以標準軌跡為基準在4種具有代表性的禁飛區情況下完成機動制導仿真實驗。 1) 由左右2個半圓分布的圓柱形禁飛區形成的包圍分布禁飛區。 表1 CAV-H飛行始末狀態條件Table 1 Initial and terminal conditions of CAV-H 圖7 標準軌跡高度、速度時間變化Fig.7 Altitude and velocity of standard trajectory 2) 均勻分布在始末兩端中間的三列圓柱形禁飛區。 3) 由兩個矩形禁飛區構成的飛行走廊。 4) 正弦曲線形狀的禁飛區構成的通道。 仿真實驗中,在沒有禁飛區的情況下獲得標準軌跡后,飛行器是在提前不知道禁飛區具體形狀的情況下,僅通過觸角的探測反饋得出某一點有禁飛區并且不能通過。 根據表1中的飛行數據以及4種禁飛區約束條件,使用基于觸角探測的雙模機動制導策略,獲得了地面制導軌跡路線與控制指令,如圖8和圖9 所示。其中圖8為4種禁飛區情況下的經緯度軌跡路線圖,圖8(a)與圖8(b)中的黑色圓圈代表的是半徑為0.5°(3 198 km)和0.6°(3 826.8 km)的圓柱形禁飛區,紅色圓圈表示的是在每一個分段定點周期內,選擇的臨時終端點。仿真實驗中,多觸角探測定點模式的積分周期設置為10 s,而三觸角機動制導模式的積分周期設置為1 s,每100 s執行一次多觸角探測定點模式,每1 s執行三觸角機動制導模式,各個任務中的定點參考距離設置為18°(115 128 km)。 由圖8看出,針對每一個禁飛區任務,算法一方面由多觸角探測定點模式產生臨時終端點,另一方面通過藍色的觸角在臨時終端點的基礎上進行機動制導。在每一個任務的初始階段,臨時終端根據分段定點模式7條觸角的末端位置進行不斷地更新,產生了較為連貫的臨時終端點;當飛行器距離真實終點的距離即將達到分段距離Dg時,臨時終點基本都聚集在終點位置[100,0]。 圖9為4種禁飛區任務中的控制指令隨時間的變化圖,其中藍色的虛線代表的是由縱向跟蹤制導策略產生的攻角指令,攻角指令變化次數較多,實現對標準軌跡的跟蹤,紅色實線代表的是經過延時濾波器濾波后的傾側角。可以明顯看到,飛行器在規避各種復雜的禁飛區任務時,采取的傾側角瞬變次數較少,能夠有效規避禁飛區和航向角限制。并且,4種任務中,當飛行器需要由一個帶有傾側角的機動方向轉到反方向機動時,即飛行器在經歷傾側角正負逆轉時,延時濾波器會令傾側角在這期間經歷一段歸零的過程,防止傾側角的變化過大、切換頻率過快造成飛行器失穩。 圖10為3種路徑約束在機動過程中隨時間的變化圖,其中每張路徑約束變化圖從上到下分別為動壓、過載、熱流率約束變化。在觸角停止條件中加入的三大路徑約束停止條件,有效地避免了飛行器在加入傾側角機動后產生路徑約束上可能超出的情況。在圖10中,紅色虛線代表3種約束的上限值,藍色實線代表實際的約束變化。由圖10可見飛行器在4種禁飛區任務下的機動制導過程,完全滿足熱流率、動壓和過載約束。 圖9 4種禁飛區情況下的控制指令Fig.9 Control commands in four NFZs 圖10 4種禁飛區情況下的路徑約束Fig.10 Path constraints in four NFZs 為了驗證算法在初始狀態離散的情況下的魯棒性,將以上4種任務中的初始狀態和飛行器本身參數采用蒙特卡洛方法進行隨機離散。其中,對于狀態矩陣中的變量采取表1中的3σ原則進行離散,飛行器的質量、空氣動力學系數分別按照10%和5%的比例進行離散。隨后將離散后的初始條件代入模型進行驗證實驗,每一個任務分別進行1 000次實驗,各禁飛區任務的軌跡簇如圖11 所示,每一個任務中的高超聲速滑翔飛行器機動制導過程均獲得成功。 圖11(a)中,有2次實驗的機動制導軌跡略微偏離大部分軌跡,是因為在多觸角定點策略中采用的是7條粗略預測觸角,如果在定點模式中增加探測觸角的數量,軌跡簇會更為集中。 如圖12所示,在蒙特卡洛仿真實驗中,將4個任務的1 000次蒙特卡洛實驗中熱流率、動壓和過載3種約束的最大值數值和出現的時間點分別進行記錄。圖12中,每一個任務的熱流率、動壓和過載約束都符合飛行器的設計要求,并且在動壓約束方面,各個任務的動壓最大值分布較為集中,體現了模型的魯棒性。圖13中展示的是蒙特卡洛實驗中,4種任務共4 000次仿真實驗的飛行器速度跟蹤情況,可見模型的LQR算法使得飛行器在機動制導過程中的速度參考經度這一變量基本上跟蹤上了標準軌跡的飛行器速度。因此,本文提出的多觸角探測下高超聲速滑翔飛行器再入機動制導方法具有很好的魯棒性和穩定性。 圖11 4種禁飛區情況下軌跡簇Fig.11 Trajectories in four NFZs 為了檢驗算法用于高超聲速滑翔飛行器機動制導時在計算時間上的有效性和可靠性,在飛行器進行4種禁飛區任務雙模式的機動制導過程中,記錄每一次多觸角探測定點的計算時間以及三觸角探測機動制導的計算時間,研究中采用的電腦和軟件分別是CPU:3.2 GHz的臺式機和MATLAB 2018a。獲得整個任務的計算時間集合后,分別作兩種計算時間隨飛行時間的變化圖。 圖13 魯棒性實驗速度跟蹤情況Fig.13 Robustness experiment speed tracking 如圖14所示,實線的4條曲線是多觸角分段定點模式的計算時間,其中每一次飛行任務中的多觸角探測定點次數由定點時間間隔決定。圖14中,多觸角探測定點策略的計算時間符合由大到小的趨勢,因為在任務初始階段,飛行器飛行任務的剩余地面距離較大,觸角的探測距離較長。 任務一中在400 s左右和1 300 s左右各出現一次大的計算時間的反彈,是由任務一中禁飛區的特征決定的,飛行器在這兩個時間段應恰好經過由圓柱形禁飛區構成的兩道包圍圈,這兩個階段是觸角探測長度的臨界變化階段。在任務二中,由于飛行器經過均勻分布的禁飛區時,左右的禁飛區時有時無,多觸角探測的距離也是相應的時長時短,直接造成了任務二中多觸角探測定點時間的常態波動。相反,任務三和任務四的禁飛區形狀較為整齊,所得到的多觸角探測定點計算時間隨飛行時間的增大,下降趨勢明顯。另外,圖14 中的4條點劃線代表4種任務中三觸角機動制導模式的計算時間,可見機動制導模式的耗時遠小于分段定點模式的耗時。 圖14 雙模式計算時間變化Fig.14 Dual mode computing time variation 圖15和圖16為蒙特卡洛實驗中4 000次實驗2種觸角探測反饋模式的計算時間特性,在每一次蒙特卡洛實驗中,分別記錄該實驗中2種模式的計算時間最大值、最小值以及出現這些值的飛行時刻。再計算每一次實驗中2個模式的計算時間平均值,找出與平均值相類似的計算時間時刻點并進行記錄。由圖15與圖16可見,2種模式的計算時間均很短,基于多觸角探測反饋的機動制導策略能夠在時間上滿足高超聲速滑翔飛行器機動制導的要求。 圖15 分段定點模式耗時特點Fig.15 Time-consuming characteristics of segmented fixed point mode 圖16 機動制導模式計算時間變化Fig.16 Time-consuming characteristics of maneuvering guidance mode 在分段定點模式中,臨時路航點的選取不僅由禁飛區信息決定,也受到定點參考距離和定點時間的影響。為驗證不同定點參考距離和不同定點時間對于分段定點模式路航點選取和對本文模型穩定性的影響,在任務一的禁飛區條件下,采取控制變量方法分別測試2種因素的作用。 一是采取6種不同的定點參考距離Δdr,分別取5°,15°,20°,30°,50°,70°,定點時間間隔固定為40 s,從圖17中可以發現,Δdr越小,得到臨時路航點越密集。雖然6種情況下的機動制導實驗都能順利完成,但當定點參考距過小或者過大時,軌跡不易收斂至中心軸線。圖18中展示了不同定點參考距離對于計算時間的影響,其中,計算時間最大值和最小值未受太大影響,而機動制導的平均預測時間隨著定點參考距離變大而變大。需要說明的是,在圖18和圖19中,為了使得時間大小的差別在作圖時表現的更為明顯,縱坐標的刻度采用了Matlab中log為底的對數形式進行尺度刻畫,但是每個小刻度對應的數值對于時間間隔仍是均勻的。 圖17 不同參考間隔的飛行軌跡Fig.17 Flight trajectories with different reference intervals 二是采取6種不同的定點預測時間間隔Δtr,分別是10 s,30 s,50 s,100 s,200 s,500 s,定點參考距離是18°,從圖20中可見,Δtr越小,得到臨時路航點越密集,當定點時間為500 s時,由于第一次定的臨時終端點在中軸線上,在下1次預測定點前,飛行器發出的觸角已經全部打在位于飛行器正前方的小禁飛區上。對比前面5種定點預測時間間隔的機動制導結果,飛行器的第1次臨時終端點雖然都相同,但是前5次實驗都因為分段定點的預測時間間隔較短,使得飛行器在未飛至第1次臨時終端點的時候就已經重新定點,而這5次實驗中更新后的臨時路航點均是在第一包圍圈外,使得飛行器能夠機動制導出去。由于預測時間間隔變化并不影響每次臨時路航點與飛行器之間的距離,因此不同定點預測時間間隔對于圖19中的計算時間影響較小。 圖18 不同參考間隔的耗時特性Fig.18 Time-consuming characteristics of different reference interval 圖19 不同定點預測時間的耗時特性Fig.19 Time-consuming characteristics of different fixed-point forecast time 本文通過對基于觸角的預測校正制導方法的改進,采取2種多觸角探測模式相結合的方法,提出了基于多觸角的高超聲速滑翔器再入機動制導策略。 1) 該制導策略極大地降低了預測反饋的計算時間,仿真中雙模式的計算時間特性體現了該方法滿足機動制導的要求。 2) 通過控制變量方法驗證不同定點參考距離和定點預測時間間隔對機動制導效果影響,從而得知,定點預測時間間隔對機動制導的影響較大。 3) 通過4種禁飛區任務的蒙特卡洛仿真實驗驗證了該方法的魯棒性。 綜上,本文提出的基于多觸角探測的再入機動制導策略能夠較好地應用在高超聲速滑翔飛行器的研究中。3.2 分段制導模式下的三觸角探測反饋制導策略
4 仿真算例與分析

4.1 不同禁飛區條件的飛行仿真
4.2 蒙特卡洛仿真與分析

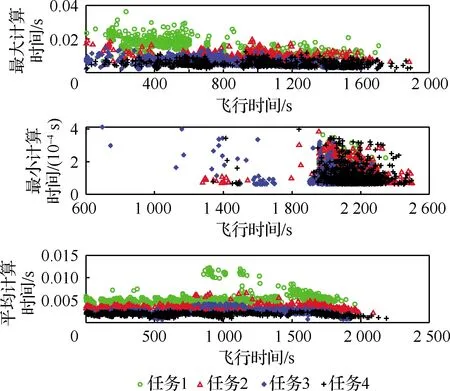
4.3 算法消耗時間分析

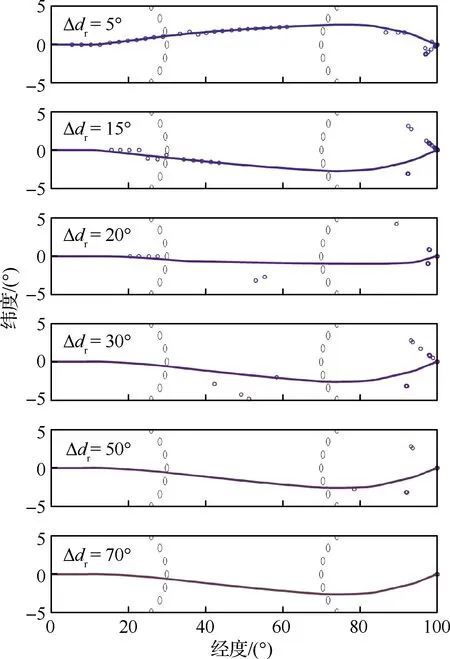
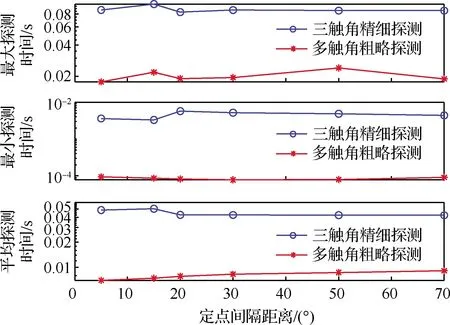
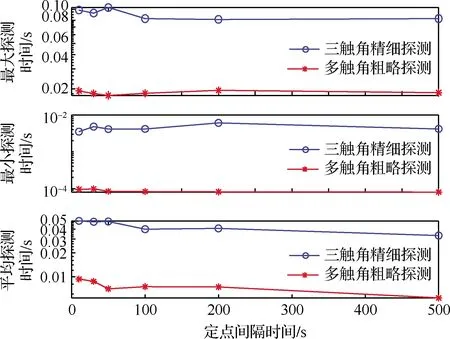
4.4 不同定點參考距離和定點時間影響分析
5 結 論