基于改進FCM的極化SAR圖像機場跑道區域檢測
2020-11-30 09:05:59王海松鄭成學趙洪鵬郭子赫程爭
科技資訊 2020年27期
王海松 鄭成學 趙洪鵬 郭子赫 程爭

摘? 要:該文提出了一種基于改進FCM的極化SAR圖像機場跑道區域檢測方法。針對傳統FCM算法對噪聲敏感、未考慮相鄰像素間的關聯的問題,該文引入Wishart距離替代歐式距離,并用鄰域像素信息對原始隸屬度函數進行加權,提高了算法的分類性能。接著根據跑道區域的弱散射特性從模糊聚類結果中提取感興趣區域。最后利用跑道的結構特征對感興趣區域進行辨識。實驗結果表明,該文算法能夠有效檢測出機場跑道區域,結構較完整。
關鍵詞:FCM? 極化SAR? 跑道區域檢測? 結構特征? Wishart距離
中圖分類號:TN957? ? ? ? ? ? ? ? ? ? ? ? ? 文獻標識碼:A? ? ? ? ? ? ? ? ? ? 文章編號:1672-3791(2020)09(c)-0011-03
Abstract: An improved FCM-based airport runway area detection method for polarimetric SAR image is proposed in this paper. Aiming at the problem that the traditional FCM algorithm is sensitive to noise and does not consider the correlation between adjacent pixels, Wishart distance is introduced to replace euclidean distance, and the original membership function is weighted with neighborhood pixel information, both of which can improve the classification performance of the algorithm. Then the regions of interest are extracted from the fuzzy clustering results according to the weak scattering characteristics of the runway region. Finally, the region of interest is identified by utilizing the structural features of runway. The experiment results show that the algorithm can effectively detect the airport runway area with complete structure.
Key Words: FCM; Polarimetric SAR; Runway area detection; Structure characteristics; Wishart distance
極化合成孔徑雷達(Polarimetric synthetic aperture radar, PolSAR)因其全天時、全天候的工作特性,以及可提供豐富的極化信息,在目標檢測、地物探測、環境監測、變化檢測等領域得到了廣泛應用。機場是一項重要的軍用和民用基礎設施,其自動檢測研究具有重要的應用價值,受到了廣泛關注。目前機場檢測方法可以大致分為兩類:基于直線特征檢測的方法和基于圖像分類的檢測方法。但極化SAR圖像中存在強烈的相干斑噪聲,增加了直線特征提取的難度,使得前者的性能不甚理想[1-2]。后者先對圖像進行分類,再提取感興趣區域,最后利用機場跑道的結構特征對感興趣區域進行辨識,確定機場跑道區域的位置。這種方法適用于復雜場景情形下機場跑道檢測。傳統的分類方法采用Wishart分類器對極化圖像分類,這種方式認為像素只能隸屬于某一指定的類中。受成像分辨率的限制,圖像中的單一像素可能是多種地物的混合,硬性的劃分會導致像素的誤分類,進而影響機場跑道檢測算法的性能。針對這個問題,該文擬采用改進的模糊C均值(Fuzzy C-Means,FCM)算法先對原始極化圖像分類,以提高算法后續檢測的性能。
1? 算法描述
1.1 改進的FCM算法
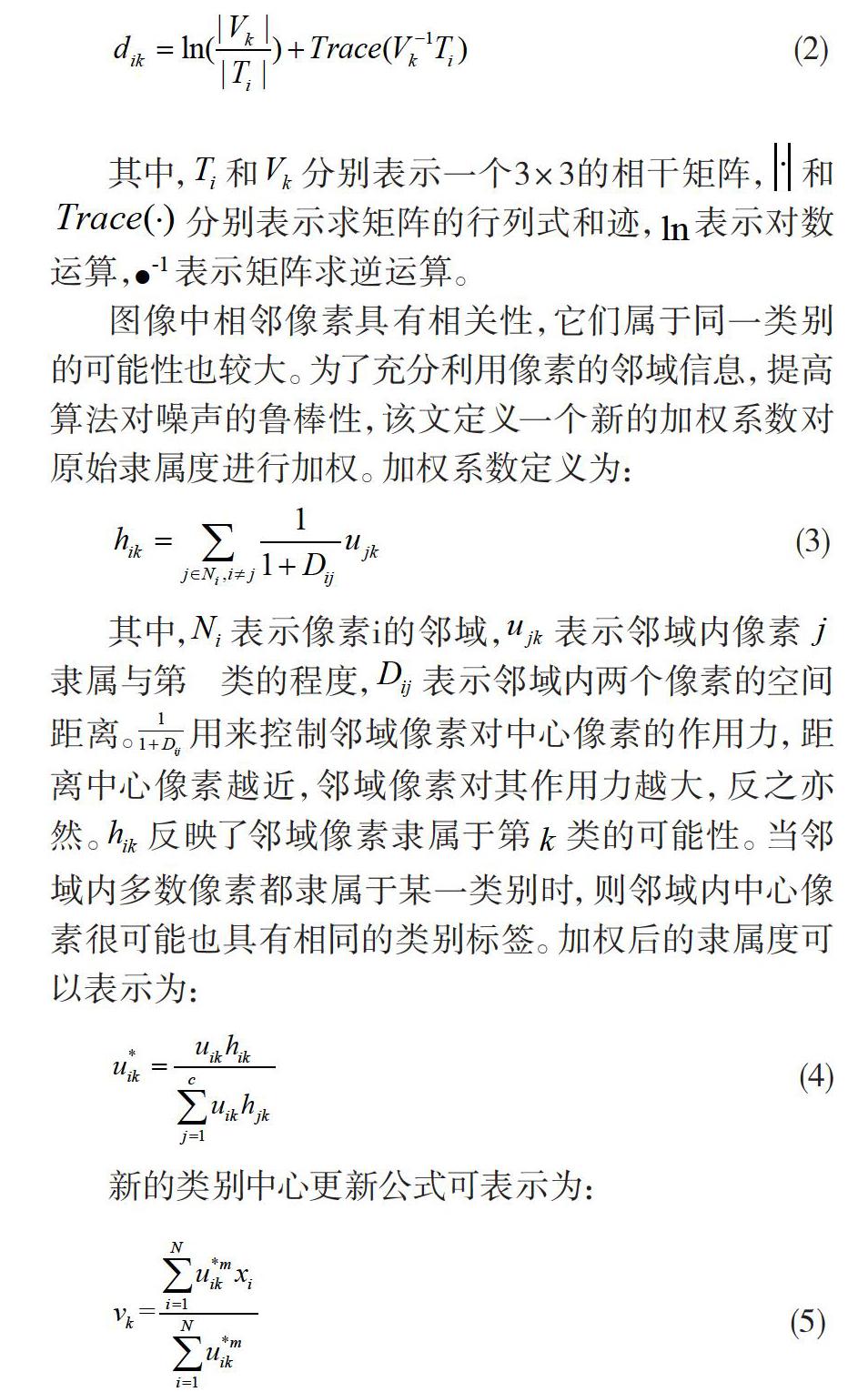
FCM算法具有簡單、易計算的特點,且不需要先驗信息,在極化遙感圖像處理領域中得到了廣泛的應用[3]。由于傳統的FCM算法未考慮像素的鄰域信息,其對含噪聲嚴重的圖像進行分類時,結果不甚理想。并且傳統的FCM算法采用歐氏距離作為像素與類中心的非相似性測度,學者們研究表明歐式距離并不適用于極化SAR數據。針對以上問題,該文對FCM算法進行了兩點改進:首先是根據極化SAR數據服從復Wishart分布的特性,采用Wishart距離替代歐式距離;其次是根據像素與其鄰域像素具有相關性的特點,引入像素的鄰域信息到目標函數中,提高算法對噪聲的魯棒性。
1.2 感興趣區域提取
研究表明,機場跑道區域具有弱散射隨機特性,其在圖像中呈暗色。因此該文在利用改進的FCM對原始極化SAR圖像迭代聚類結束后,根據分類結果,計算各類的平均功率。然后找出最小功率對應的類別標簽,將該類中的像素作為感興趣區域。由于河流、道路、海洋等與機場跑道區域的散射特性相似,因此提取的感興趣區域中包含一些干擾目標,需要進一步辨識。
1.3 感興趣區域辨識
在整個機場區域中,跑道具有穩定且典型的特征。因此該文采用跑道的結構特征[5],如長寬、直線特征,對感興趣區域進行辨識,確定機場跑道區域的位置。
2? 實驗結果與討論
為了驗證該文算法的性能,采用了真實的極化SAR數據進行實驗。實驗數據由美國UAVSAR系統在Gulfcoast地區采集的,圖像分辨率為7.2m×4.9m(距離向×方位向),大小為800×1000,如圖1(a)所示。實驗結果如圖1(b)~(d)所示。從圖1(b)中可以看出,經過改進的FCM算法對極化SAR圖像聚類后,機場跑道區域與周圍地物大致可以區分出來。圖1(c)是感興趣區域的提取結果,從圖中可以看出,提取的機場跑道區域結構比較完整。但是圖中包含了河流、道路等與機場散射特性相似的干擾目標,需要進一步辨識。采用機場跑道的結構特征對感興趣區域進行辨識,結果中只保留了機場跑道區域,干擾目標被篩選剔除了,如圖1(d)所示。整個檢測流程耗時113.27s,檢測速度較快。
3? 結語
該文采用Wishart距離替代歐氏距離,并引入像素的鄰域信息改進了傳統的FCM算法,提高了算法對極化SAR圖像的分類性能。接著根據機場跑道的散射特性提取感興趣區域,并用跑道的結構特征對感興趣區域進行篩選,確定了跑道區域的最終位置。對UAVSAR系統采集的數據進行實驗,結果驗證了算法檢測的有效性。
參考文獻
[1] Nengyuan LIU, Zongyong CUI, Zongjie CAO, et al. Airport Detection in Large-scale SAR Images via Line Segment Grouping and Saliency Analysis[J]. IEEE Geoscience and Remote Sensing Letters, 2018,15(3):434-438.
[2] Wentao LV, Kaiyan DAI, Long WU, et al. Runway Detection in SAR Images Based on Fusion Sparse Representation and Semantic Spatial Matching[J]. IEEE Access,2018(6):27984-27992.
[3] Zheng CHENG, Ping HAN, Binbin HAN, etal. Classification of Polarimetric SAR Image based on Improved Fuzzy Clustering[C]//2019 Asia-Pacific Signal and Information Processing Association Annual Summit and Conference (APSIPA ASC).2019:584-589.
[4] Licheng Jiao, Fang Liu. Wishart Deep Stacking Network for Fast POLSAR Image Classification[J]. IEEE Transactions on Image Processing, 2016,25(7):3273-3286.
[5] 程爭,韓萍,韓紹程.基于RFCM的PolSAR圖像機場跑道區域檢測方法[J].中國民航大學學報,2019,37(5):30-34.
[6] 盧曉光,藺澤山,韓萍,等.自適應無監督分類的PolSAR圖像機場跑道區域快速檢測[J].遙感學報,2019,23(6):1186-1193.
