基于無載波脈沖UWB通信的室內高精度定位系統
2020-11-30 09:31:41王建威房興剛石統照
中小企業管理與科技·下旬刊 2020年10期
關鍵詞:技術
王建威 房興剛 石統照
【摘? 要】超寬帶(UWB)定位技術憑借其穿透力強、功耗低等優點成為現今室內定位中最具發展前景的技術。論文基于超寬帶(UWB)技術的原理與優缺點對其進行優化,設計了硬件系統和軟件系統,即一種在室內沒有障礙物的情況下定位精度小于10cm的無線定位系統。
【Abstract】Ultra wide band (UWB) positioning technology has become the most promising indoor positioning technology due to its strong penetration, low power consumption and other advantages. The paper optimizes ultra wide band (UWB) technology based on its principle, advantages and disadvantages, this paper designs the hardware system and software system, that is, a wireless positioning system with positioning accuracy less than 10 cm when there are no obstructions in doors.
【關鍵詞】室內定位技術;超寬帶(UWB)技術;無線通信技術;高精度定位
【Keywords】indoor positioning technology; ultra wide band (UWB) technology; wireless communication technology; high precision positioning
【中圖分類號】P228.4;TN925? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?【文獻標志碼】A? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?【文章編號】1673-1069(2020)10-0178-02
1 引言
隨著移動設備和大型娛樂場所的增加,室內定位系統和導航成為剛需,在復雜的室內環境中這一需求特別明顯,時刻需要了解用戶、移動設備、各類器材和一些特殊物品在復雜的室內環境中的具體位置。
新型無線網絡技術不斷發展,各種技術都存在著自己的優缺點,所以應取其精華去其糟粕,打造穩定性能強、適應性良好、精度高的短距離室內定位系統。
2 UWB技術概述
UWB技術從20世紀就已經開始存在,它的發展備受矚目,開始僅限用于軍事領域,并不能完全應用于日常生活,這也限制了它的發展。隨著科技的不斷創新,UWB技術也開辟了新的道路,獲得了民用產業應用的許可,在利益的推動下,該技術迅猛發展。隨著社會不斷地發展,我國的移動設備與大型商場日益激增,其定位與導航有了巨大的需求量,更因為該技術擁有發射功率低、穿透性強、安全系數高及不敏感于信道衰落的特點,在復雜的短距離傳播室內場所可以得到廣泛的應用。
3 定位系統整體設計方案
3.1 無線定位技術
最初的無線定位系統主要是針對室外環境所開發的,隨著科技的發展,物聯網技術的興起,移動端設備數量急劇增加,這種情況下無線定位技術才逐漸應用于室內定位,其原理為:通過已知的數據信息經過算法分析與計算,測出其所需要的移動端的位置信息,從而達到無線定位。而且還可利用IR-UWB技術和多頻帶復用技術方案:使用多頻帶技術和正交頻分復用技術(Orthogonal Frequency Division Multiplexing,OFDM)結合的實現方案。綜合多種方案進行分析實驗最后得出結果。
3.2 系統整體設計
定位系統主要由幾部分組成:基站節點、標簽節點和上位機。定位系統的硬件層由基站的節點和標簽節點組成,基站A1與A2所在直線與A2和A3所在的直線相互垂直,構成一個笛卡爾坐標系,經過優化的卡爾曼濾波實現定位算法,最后得出標簽節點的坐標。之后標簽節點與硬件設備之間通過無線通信交換數據,通過延時計算得出信號飛行時間,通過網關傳輸給計算機中的上位機。
3.3 系統功能模塊選擇
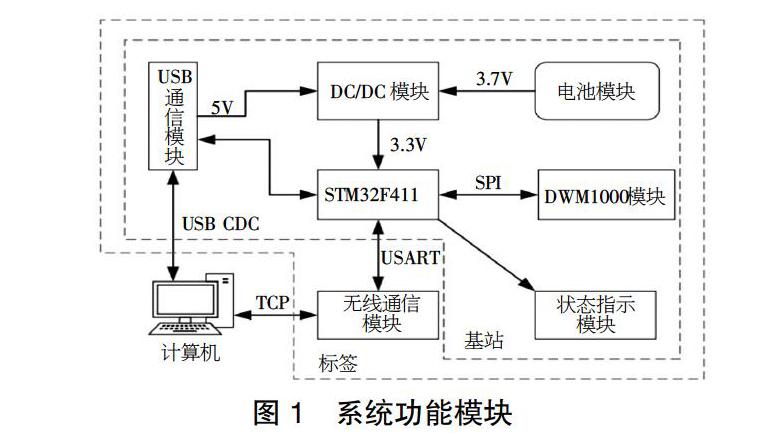
定位系統的電路設計包含所有必需的電路,在本設計中只采用必要的模塊(見圖1)。
其中,系統包括STM32F411主控中心、DWM1000模塊、控制器運行電路、電源模塊等模塊。
4 軟件設計
4.1 MCU軟件設計
本室內定位系統MCU軟件開發環境采用由ST公司免費提供的跨平臺單片機開發軟件atolloc TrusStudio。該款軟件是由ST公司開發的,對STM32單片機客戶提供免費使用的嵌入式集成開發環境。
MCU程序的運行流程包含如下幾步:MCU的系統寄存器復位、配置程序預設的主頻等參數、初始化使用到的外設接口、配置SPI與USART接口的工作方式、中斷事件處理等,還需要對預先設置的外部的UWB芯片、數據指示模塊等外部器件進行初始化,并按設計需求對定位芯片內部寄存器進行合理的配置,使其運行在適當的模式中。當定位基站中的UWB模塊收到來自其他節點傳送的通信請求,MCU通過程序預設指令判斷收發數據包是否合法,是來自哪一個節點并判斷目的,并返回相應數據包。接下來主程序將請求內容執行后的結果進行處理,通過預置算法測算出時間差等參數,并將結果數據打包成合法數據包傳送回去。為了使測量出來的結果更加精確,程序在計算結果的過程中進行了適當的數據擬合,并通過實驗結果對擬合參數進行了合理的修正。
4.2 定位算法
系統使用改進優化后的定位算法,MCU會持續對測算的結果進行矯正,用矯正的基站標簽節點的測量結果預測目標的位置。結合優化后的TODA算法,將其與卡爾曼濾波算法合理地結合后可以計算出良好的定位坐標,采用此算法可以快速地預測出標簽節點的具體坐標,最終實現理想的定位效果。
4.3 上位機設計
定位系統的上位機軟件開發中,我們使用Python中的一個圖形界面庫編寫。PyQt5提供了一種特殊的安全類型來替代傳統的回調方式,該類型為信號槽方式,這一特殊功能大大提高了UI界面中各個組件之間的協調性,使圖形界面的布局開發過程簡單明了。系統穩定運行時,PC端接收并解析來自標簽的數據包,將解析出來的基礎數據分配給2D繪圖線程。上位機程序與MCU程序可相互配合,可以在線修改MCU程序內置的固定參數,也可通過有線的方式對基站與標簽實現在線固件升級等操作。
5 測試與誤差分析
5.1 誤差曲線擬合與補償
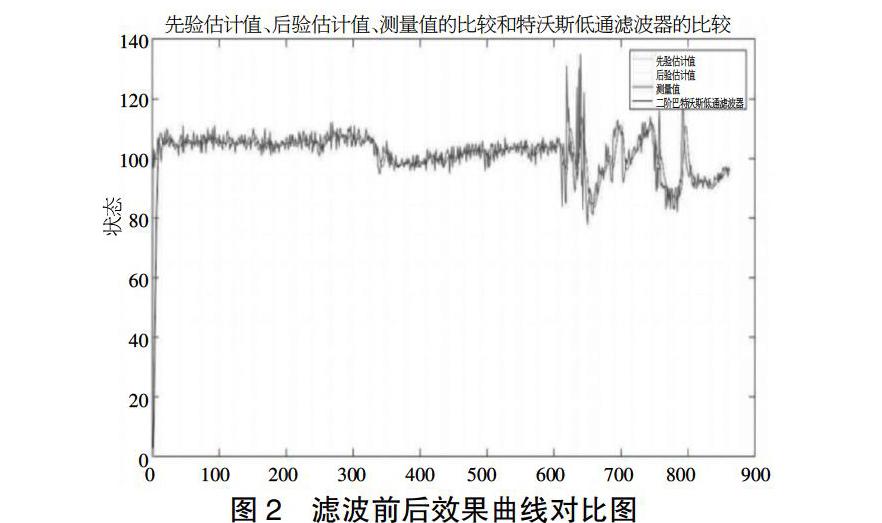
在進行實驗測試的過程中,發現在通信過程中偶爾會出現幾個測量數據差距較大的情況,使實際的定位結果產生較大誤差。為了減小類似的誤差,對模塊進行再次校準,對定位算法優化,之后對實驗數據進行擬合。結果如圖2所示。
5.2 測試結果分析
在實驗室內搭建完成定位實驗的環境,通過多次的實驗所得到的數據對實驗結果進行分析,再將定位算法、濾波算法中的具體參數進行了多次調整并優化控制器的程序,最終成功使定位系統穩定高效地運轉,測距定位效果與抗干擾能力都達到預期的精度。
6 結論
本文設計的系統針對的是目前復雜的室內環境,而傳統定位系統具有不易攜帶、設備成本高、體積大、定位精度較低等方面的問題,本文設計的定位系統可以有效解決以上問題。
取得的主要研究成果如下:①本文分析了多種定位算法的優劣,在傳統定位算法基礎上進行了適當的優化,并對優化后的算法在MATLAB中進行了模擬測試,采用卡爾曼濾波對傳輸數據進行處理,同時,提高了系統定位精度。②定位系統的硬件核心是DWM1000模塊,輔以STM32F411控制器對定位數據進行處理。采用PyQt5開發定位監控軟件,通過WiFi與定位目標進行數據交互,同步標簽節點進行位置監測。③在實驗室內模擬了實際環境,對移動目標進行了定位和追蹤,發現該定位系統運行狀態優良,出錯率較低,并且定位精度達到了10cm。
【參考文獻】
【1】趙紅梅.超寬帶室內定位系統應用技術[M].北京:電子工業出版社,2017.
【2】余艷偉,徐鵬飛.近距離無線通信技術研究[J].河南機電高等專科學校學報,2012,20(3):18-20.
【3】張和平.淺析短距離無線通信技術[J].信息時代,2012(2):53-54.
【4】張凡,陳典鋮,楊杰.室內定位技術及系統比較研究[J].廣東通信技術,2012(11):73-79.
猜你喜歡
中國科技博覽(2016年19期)2016-10-19 12:44:57
中國科技博覽(2016年19期)2016-10-19 12:07:10
中國科技博覽(2016年19期)2016-10-19 11:56:58
中國科技博覽(2016年18期)2016-10-19 11:28:27
中國科技博覽(2016年18期)2016-10-19 11:16:57
中國科技博覽(2016年18期)2016-10-19 11:12:23
中國科技博覽(2016年18期)2016-10-19 09:33:57
中國科技博覽(2016年18期)2016-10-19 09:04:19
中國科技博覽(2016年18期)2016-10-19 08:55:40
科技視界(2016年21期)2016-10-17 20:00:58
