細圓柱體的夾持裝置結構設計
2020-11-29 14:06:08肖學才賈曉宇張海軍吳鋒杰
機電信息 2020年33期
肖學才 楊 琴 賈曉宇 張海軍 吳鋒杰
(1.嘉興學院機電工程學院,浙江嘉興314001;2.嘉興學院數理與信息工程學院,浙江嘉興314001;3.嘉興市第二醫院呼吸科,浙江嘉興314001)
0 引言
隨著醫療技術的進步,手術操作中的自動化、智能化程度要求越來越高,自動實現一些細圓柱體件(穿刺針桿等)的抓取顯得非常有必要。細圓柱體由于本身剛度低,夾持時如果用力過大,容易出現變形,另外還有可能出現翹曲、鼓形、錐度過大等現象,使器件報廢[1-2]。為此,設計一套細圓柱體的夾持裝置,輔助醫療手術操作,提高手術操作效率,成為醫療器械設計中一個迫切需要解決的研究課題。
細圓柱體件由于直徑尺寸較小,通常小于5 mm,傳統的夾持裝置難以實現有效夾持,用力過大,則使其變形,用力過小,則讓其滑落。本文首先給出夾持裝置的方案設計;其次,利用三維建模軟件,給出夾持裝置的結構模型;最后,對夾持裝置的執行部件自由度進行了計算,以驗證其運動的合理性。
1 方案設計
由于夾持物(細圓柱件)載荷較小,細圓柱體夾持裝置的驅動利用微型電機來實現,結構上主要由底板、支撐軸、微型電機、軸、齒輪減速部件、臂板等零部件組成。
首先,兩塊底板通過支撐軸連接在一起構成夾持裝置的底座,其中,支撐軸與底板之間利用螺栓來連接,如圖1所示。
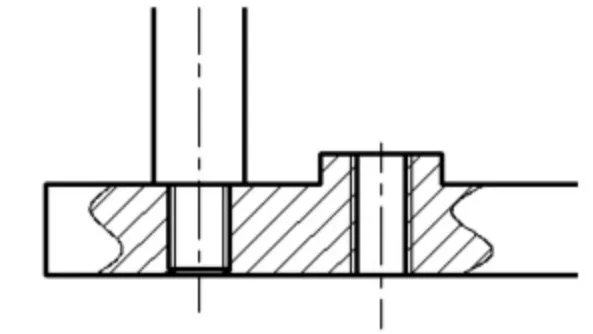
圖1 底座螺栓連接結構
其次,在底座上安裝微型電機加齒輪減速部件,通過電機輸出扭矩來帶動夾持裝置實現水平面內360°轉動,齒輪和夾持裝置通過4個M8螺釘連接固定,如圖2所示。齒輪減速部件中,小齒輪齒數取Z1=17,大齒輪齒數取Z2=3×17=51,傳動比為再次,在夾持裝置擺動關節處也采用電機與齒輪減速裝置來驅動,使臂板實現上下擺動,如圖3所示。

圖2 夾持裝置水平面360°轉動結構
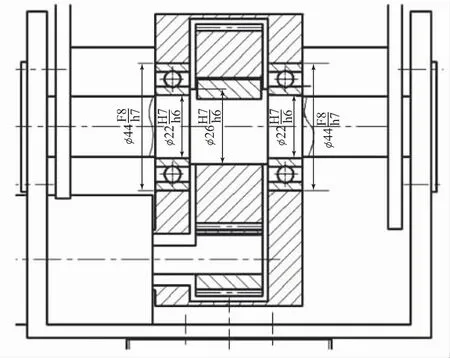
圖3 夾持裝置擺動關節處結構
最后,為實現對細長圓柱體件的有效夾持,通過微型電機帶動大齒輪,然后齒輪通過臂板帶動手爪,使兩只爪向中間運動,實現夾緊動作,如圖4所示。
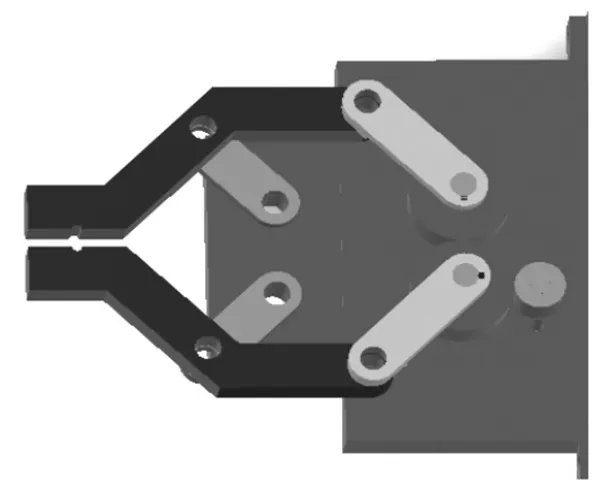
圖4 夾持裝置執行部件結構模型
與平面二維圖形相比,夾持裝置的三維結構模型更加直觀。根據上面的方案設計,利用三維建模軟件Solidworks繪制了整個夾持裝置的結構模型,如圖5所示。

圖5 夾持裝置結構模型
2 執行部件機構自由度
由機械原理[3]可知,機構要實現確定的運動,必須滿足一定條件,即機構原動件的數目與機構自由度數目相等。在細圓柱體夾持裝置中,執行部件機構最為關鍵。為此,根據前面繪制的執行部件結構模型,繪制其機構簡圖如圖6所示。
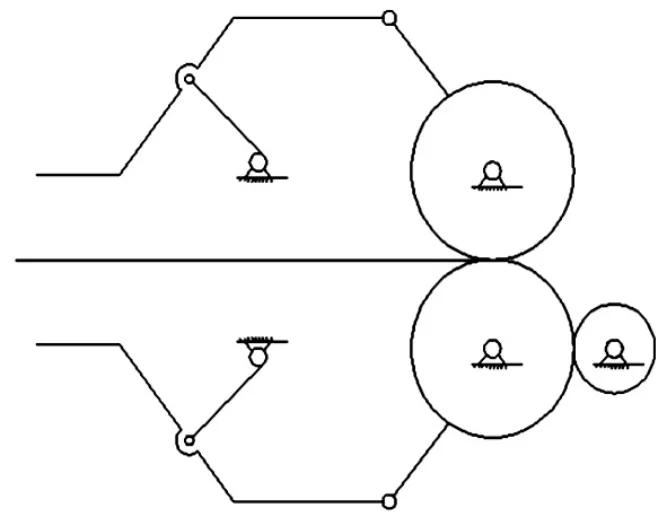
圖6 夾持裝置執行部件結構示意圖
容易看出,機構中具有7個活動構件、9個低副、2個高副,則根據機構自由度計算公式:

機構自由度與原動件的數目相等,表明機構具有確定的運動軌跡,驗證了機構設計的有效性。
3 結語
本文利用Solidworks三維建模軟件,完成了細圓柱體的夾持裝置結構設計,能夠實現細圓柱體的空間夾持功能,為細圓柱體的夾持裝置結構設計做了有益的探索。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
哲學評論(2021年2期)2021-08-22 01:53:34
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03
現代企業(2015年9期)2015-02-28 18:56:50
