面向AUV水下移動(dòng)對(duì)接的實(shí)時(shí)路徑規(guī)劃方法
2020-11-27 06:47:46時(shí)常鳴劉開周趙寶德
艦船科學(xué)技術(shù) 2020年5期
關(guān)鍵詞:規(guī)劃
時(shí)常鳴,劉開周,趙 洋,趙寶德
(1. 中國(guó)科學(xué)院沈陽自動(dòng)化研究所 機(jī)器人學(xué)國(guó)家重點(diǎn)實(shí)驗(yàn)室,遼寧 沈陽 110016;2. 中國(guó)科學(xué)院機(jī)器人與智能制造創(chuàng)新研究院,遼寧 沈陽 110016;3. 中國(guó)科學(xué)院大學(xué),北京 100049)
0 引 言
自主水下機(jī)器人(Autonomous Underwater Vehicle,AUV)是探索海洋空間的有力工具之一,在海洋科學(xué)考察和海底資源勘測(cè)等領(lǐng)域獲得廣泛應(yīng)用。利用水下對(duì)接平臺(tái)對(duì)AUV進(jìn)行自主對(duì)接,可以實(shí)現(xiàn)AUV能源補(bǔ)充、數(shù)據(jù)上傳和使命下載,從而增強(qiáng)AUV的續(xù)航力與作業(yè)能力,降低AUV的應(yīng)用成本。而AUV與移動(dòng)對(duì)接平臺(tái)之間的實(shí)時(shí)路徑規(guī)劃技術(shù),是AUV與水下對(duì)接平臺(tái)自主對(duì)接的使能技術(shù)之一。
Ken T等[1-2]提出一種基于TSK模糊理論的AUV對(duì)接控制方法,利用AUV與水下固定式對(duì)接平臺(tái)之間的橫向誤差、縱向誤差、AUV的期望縱向速度和艏向角建立相應(yīng)的模糊策略,通過仿真實(shí)驗(yàn)和實(shí)際實(shí)驗(yàn)結(jié)果證明,該方法可使AUV在沒有障礙物和海流未知的情況下回收到水下固定對(duì)接平臺(tái)內(nèi);Jantapremjit P等[3-4]將對(duì)接階段分為2個(gè)階段,利用切換加權(quán)系數(shù)的人工矢量場(chǎng)法,使AUV沿著水下固定對(duì)接平臺(tái)的中軸線運(yùn)動(dòng),達(dá)到對(duì)接所需方向和位置最終實(shí)現(xiàn)AUV的安全對(duì)接;李曄和姜言清等[5-6]提出一種基于3次B樣條和遺傳算法的AUV小范圍靜態(tài)路徑規(guī)劃方法,該方法滿足AUV對(duì)接過程中所需的終端約束和運(yùn)動(dòng)約束。上述方法都是AUV與水下固定對(duì)接平臺(tái)之間的路徑規(guī)劃方法,存在容易陷入局部極值或運(yùn)算復(fù)雜規(guī)劃時(shí)間長(zhǎng)等缺點(diǎn),無法滿足環(huán)境未知的情況下,AUV與水下移動(dòng)平臺(tái)對(duì)接的實(shí)時(shí)性需求。
本文針對(duì)復(fù)雜動(dòng)態(tài)環(huán)境下AUV與水下移動(dòng)平臺(tái)對(duì)接的實(shí)時(shí)性和終端姿態(tài)需求,研究了一種基于混合整數(shù)線性規(guī)劃[7](Mixed Integer Linear Programming,MILP)的AUV與水下移動(dòng)平臺(tái)對(duì)接路徑規(guī)劃方法,根據(jù)對(duì)接階段的需求設(shè)計(jì)了不同的目標(biāo)優(yōu)化函數(shù),實(shí)現(xiàn)了移動(dòng)對(duì)接目標(biāo)函數(shù)建模,對(duì)障礙物約束和AUV本體約束進(jìn)行了相應(yīng)的線性化,建立起由線性化約束和目標(biāo)函數(shù)組成的線性規(guī)劃模型,在相對(duì)速度坐標(biāo)系下實(shí)現(xiàn)對(duì)AUV加速度的優(yōu)化,實(shí)時(shí)規(guī)劃出AUV相應(yīng)的縱向速度和艏向角,并充分考慮AUV實(shí)際的動(dòng)力學(xué)模型,最終在AUV與水下移動(dòng)平臺(tái)之間得到滿足所有約束且目標(biāo)函數(shù)最優(yōu)的實(shí)時(shí)優(yōu)化路徑,利用仿真實(shí)驗(yàn)驗(yàn)證該方法的有效性。
1 問題描述
本文將對(duì)接過程分為2個(gè)階段:歸航階段和終端導(dǎo)引階段[8-9]。第1階段,AUV通過超短基線等傳感器快速到達(dá)對(duì)接平臺(tái)前方一定距離位置[10];第2階段,AUV通過高精度傳感器(聲、光、磁等)進(jìn)行精確導(dǎo)航定位,根據(jù)當(dāng)前的位置和艏向,以及水下對(duì)接平臺(tái)的位置及艏向,最終以期望的航向姿態(tài)完成欠驅(qū)動(dòng)AUV與水下移動(dòng)對(duì)接平臺(tái)之間的精確移動(dòng)對(duì)接。
MILP是在線性規(guī)劃(Linear Programming,LP)的基礎(chǔ)上發(fā)展而來的一種優(yōu)化方法,它融入了整數(shù)變量,可以解決具有復(fù)雜邏輯關(guān)系的實(shí)數(shù)-整數(shù)混合優(yōu)化問題。為了利用MILP優(yōu)化方法更好地解決AUV與水下移動(dòng)平臺(tái)之間的實(shí)時(shí)優(yōu)化路徑規(guī)劃問題,在此,進(jìn)行相關(guān)假設(shè)和簡(jiǎn)化:

圖 1 AUV與水下移動(dòng)平臺(tái)對(duì)接過程示意圖Fig. 1 Diagram of docking process between AUV and underwater mobile platform
1)設(shè)AUV、障礙物和水下對(duì)接平臺(tái)的當(dāng)前時(shí)刻的相對(duì)位置和相對(duì)速度已知,且下一時(shí)刻的相對(duì)位置和相對(duì)速度未知;
2)設(shè)在極小時(shí)間周期內(nèi),障礙物和水下移動(dòng)平臺(tái)的速度保持不變;
3)設(shè)對(duì)接階段水下對(duì)接平臺(tái)航行速度小于AUV的速度;
4)設(shè)水下對(duì)接平臺(tái)沿著水下移動(dòng)平臺(tái)的中軸線方向移動(dòng)。
2 約束建模
2.1 障礙物約束的線性化
如圖2所示,設(shè)E-ξη為固定坐標(biāo)系,點(diǎn)A表示AUV,點(diǎn)O表示為障礙物的圓心;VA和VO分別表示為AUV和障礙物的當(dāng)前速度矢量,VAO表示為AUV和障礙物之間的相對(duì)速度矢量,VAO=VA-VO;LAO表示為AUV和障礙物之間的相對(duì)位置矢量; γAO表示為之間的夾角,以VAO在LAO右側(cè)為正,取值范圍為 (-π,π], 同理,與邊界AM或AN的夾角,表示為單位時(shí)間內(nèi)γAOC的改變量。

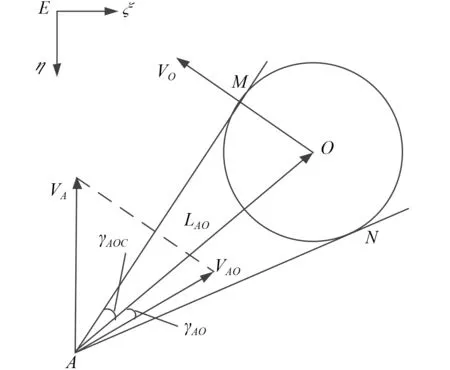
圖 2 AUV-障礙物示意圖Fig. 2 Diagram of AUV-obstacle
為了使AUV可以避開多個(gè)障礙物,障礙物約束的線性化模型可以寫成:

其中:i=1,2,...N。
為了解決AUV避開障礙物時(shí)的轉(zhuǎn)向問題,可以將式(2)寫成:
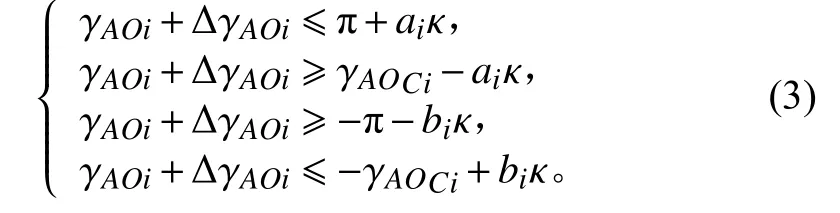
其 中ai+bi=1,ai和bi都 為 二 進(jìn) 制 變 量 ,κ 為 遠(yuǎn) 大 于 不等式左側(cè)的正實(shí)數(shù)。
當(dāng)ai=0,bi=1時(shí),式(3)中前2個(gè)等式成立,表示AUV從障礙物的右側(cè)避開障礙物;
當(dāng)ai=1,bi=0時(shí),式(3)中后2個(gè)等式成立,表示AUV從障礙物的左側(cè)避開障礙物。
2.2 AUV本體約束
考慮 AUV動(dòng)力學(xué)模型,由于螺旋槳的轉(zhuǎn)速極限約束,欠驅(qū)動(dòng)AUV航速不會(huì)太大,由AUV操縱性知識(shí)可知,過低的航速會(huì)導(dǎo)致方向舵失效。假設(shè)在單個(gè)采樣周期Δt內(nèi)自主水下機(jī)器人的速度和加速度保持不變,且滿足約束:
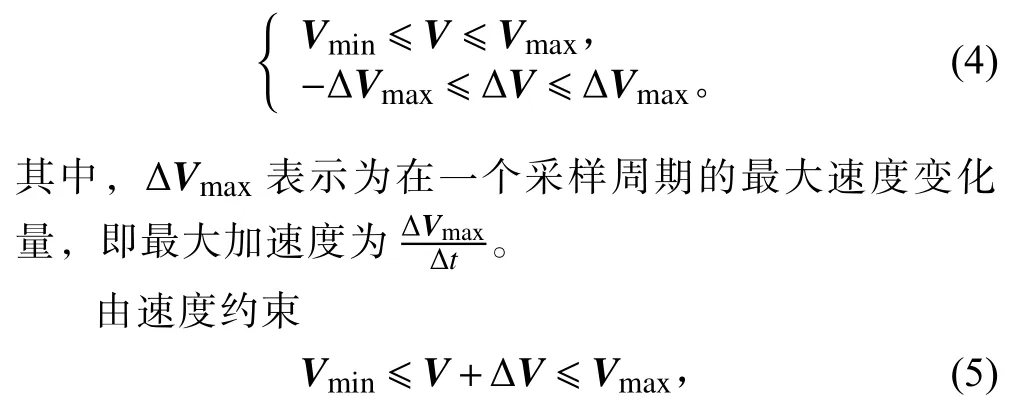
聯(lián)立式(4)和式(5)得加速度分量約束如下:

3 目標(biāo)函數(shù)建模
目標(biāo)函數(shù)是根據(jù)AUV與水下移動(dòng)平臺(tái)對(duì)接的任務(wù)需求來確定的。在AUV回收的第1階段,目的是盡快縮短AUV與水下移動(dòng)平臺(tái)的距離,并快速到達(dá)大致預(yù)定位置,這里與其他AUV路徑規(guī)劃問題類似,只需要解決目標(biāo)點(diǎn)的到達(dá)問題;第2階段,目的是AUV以期望的航向姿態(tài)盡快與水下移動(dòng)平臺(tái)完成對(duì)接,這里與其他AUV路徑規(guī)劃問題不同的是,不僅需要解決目標(biāo)點(diǎn)的到達(dá)問題,還要保證AUV是以期望方向到達(dá)目標(biāo)點(diǎn)。
3.1 距離收斂
為了使AUV與水下移動(dòng)平臺(tái)之間的距離越來越近(見圖3),即,則可以寫作:

其中,分別表示為AUV與水下移動(dòng)對(duì)接平臺(tái)之間的相對(duì)位置矢量和相對(duì)速度矢量,表示在單個(gè)采樣周期內(nèi)的變化量。
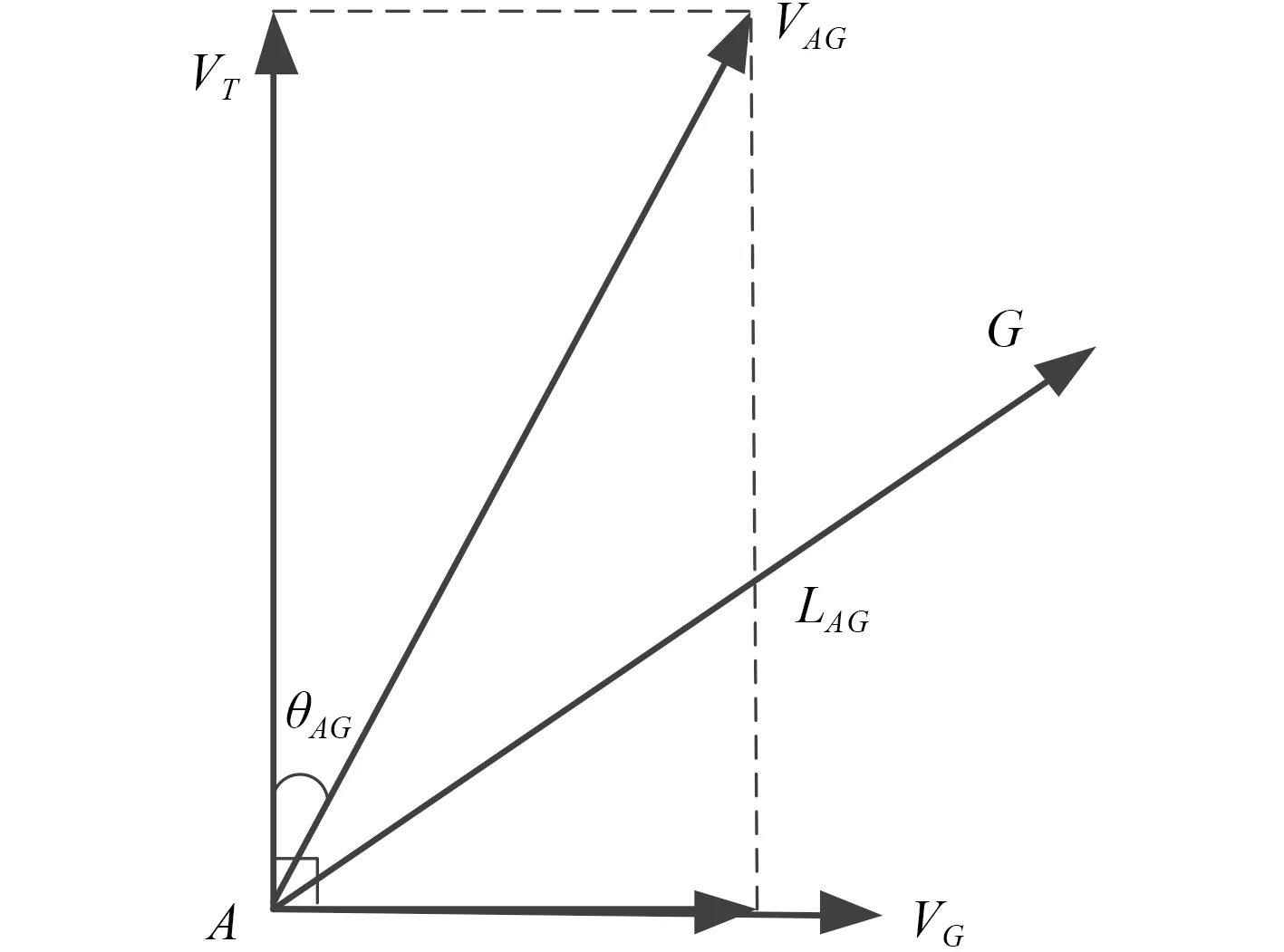
圖 3 相對(duì)速度的速度分解Fig. 3 Velocity decomposition of relative velocity
為了方便計(jì)算,式(7)寫作:

其中,j表示維數(shù)。
3.2 時(shí)間最優(yōu)
為了盡快縮短AUV與水下移動(dòng)對(duì)接平臺(tái)之間的相對(duì)距離,AUV與目標(biāo)的相對(duì)速度VAG在沿著相對(duì)位置矢量LAG上的分量應(yīng)該最大,即

經(jīng)過線性化[11]以及為了與距離收斂目標(biāo)函數(shù)式(8)相對(duì)應(yīng),式(9)最終為:

3.3 姿態(tài)最優(yōu)
為了使AUV以期望的航向姿態(tài)與水下移動(dòng)平臺(tái)完成對(duì)接,AUV與目標(biāo)的相對(duì)速度VAG沿垂直于水下移動(dòng)平臺(tái)移動(dòng)速度VG的分量應(yīng)該最大,即

設(shè)n為VT的 單 位 向 量 , 為 了 使的 同一側(cè),則n可表示為:

令

根據(jù)泰勒公式可知:

其 中 , ?f=n表 示 函 數(shù) f(VAG) 的 梯 度 ,o(||ΔVAG||)表 示泰勒余項(xiàng)。
忽略高階項(xiàng),以及為了與距離收斂目標(biāo)函數(shù)式(8)相對(duì)應(yīng),式(11)最終為,

3.4 移動(dòng)對(duì)接目標(biāo)函數(shù)建模
在AUV與水下移動(dòng)平臺(tái)對(duì)接的第1階段,只需要考慮目標(biāo)點(diǎn)到達(dá)問題;在第2階段,不僅需要考慮目標(biāo)點(diǎn)達(dá)到問題,還要保證AUV是以期望方向到達(dá)目標(biāo)點(diǎn)。同時(shí)根據(jù)子目標(biāo)函數(shù)的分析,可得總的目標(biāo)函數(shù):

其中,i=1,2,…M,表示維數(shù),這里取M=2,表示二維平面 , ωi,ωv1,ωv2≥0 為權(quán)值 , φAG為VG與LAG之間 的 夾角,為開始進(jìn)行AUV與水下移動(dòng)平臺(tái)對(duì)接的第二階段的最小距離, φmin為AUV與水下移動(dòng)平臺(tái)最終對(duì)接時(shí)允許的最小姿態(tài)偏差。
4 算法流程
AUV與水下移動(dòng)對(duì)接平臺(tái)的精確對(duì)接系統(tǒng)的實(shí)時(shí)路徑規(guī)劃流程圖如圖4所示。具體的算法流程如下:
1)通過傳感器數(shù)據(jù)獲得水下移動(dòng)平臺(tái)和障礙物的位置信息和速度信息;
2)對(duì)傳感器約束和本體約束進(jìn)行線性化,獲得相應(yīng)模型;
3)根據(jù)規(guī)劃策略公式(14)設(shè)計(jì)相應(yīng)的目標(biāo)函數(shù);
4)利用MILP規(guī)劃器實(shí)現(xiàn)對(duì)AUV加速度的優(yōu)化,并得到 期望的速度ud和 航 向ψd:

其中, (V+ΔVΔt)η, (V+ΔVΔt)ξ分別為速度矢量在η,ξ方向上的分項(xiàng)量;
5)將航行控制器作用于AUV的實(shí)際動(dòng)力學(xué)模型上,得到實(shí)際的速度u和 航向 ψ;
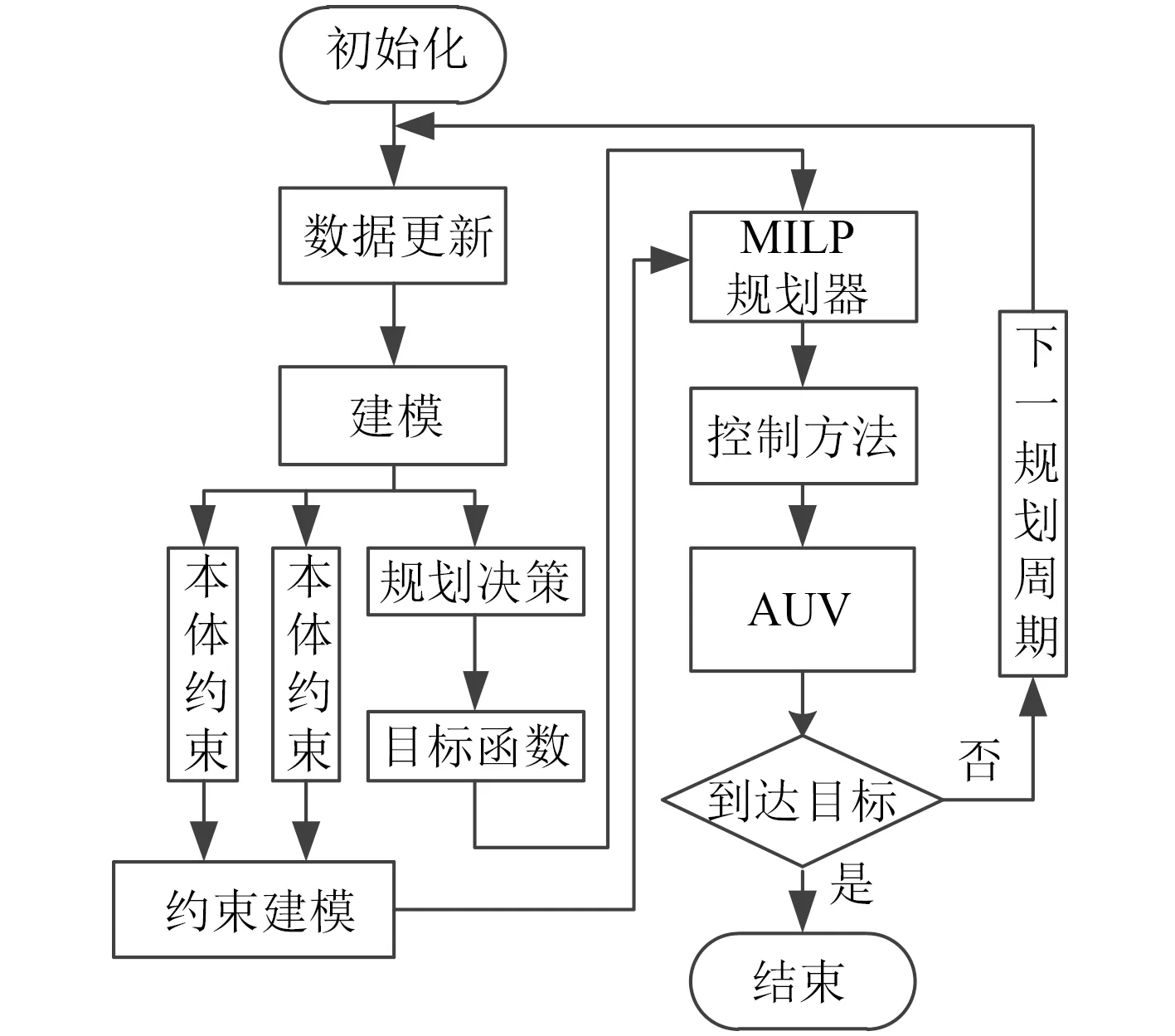
圖 4 算法流程圖Fig. 4 Flow diagram of algorithm
6)根據(jù)實(shí)際的速度u和航向 ψ ,得到下一時(shí)刻AUV的位置,即

7)判斷AUV是否到達(dá)水下移動(dòng)對(duì)接平臺(tái)位置,如果到達(dá),則規(guī)劃算法結(jié)束,否則返回步驟2進(jìn)行下一周期規(guī)劃。
5 仿真實(shí)驗(yàn)
仿真實(shí)驗(yàn)在Matlab R2015b下進(jìn)行,采用PID控制器對(duì)某型AUV進(jìn)行航行控制。MILP的規(guī)劃周期Δt=1s,開始進(jìn)行AUV與水下移動(dòng)平臺(tái)對(duì)接的第二階段的最小距離dmin=50m, 允許的最小姿態(tài)偏差 φmin=15°,表1給出了仿真實(shí)驗(yàn)中AUV、障礙物和水下移動(dòng)對(duì)接平臺(tái)的位置信息和速度信息等信息。
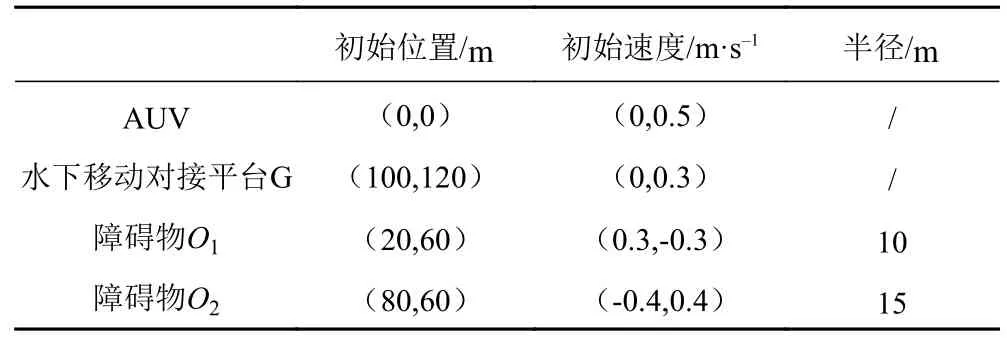
表 1 仿真實(shí)驗(yàn)初始值Tab. 1 Initial value of simulation experiment
根據(jù)仿真結(jié)果可知,MILP單步規(guī)劃時(shí)間約為0.18 s,可以滿足AUV與水下移動(dòng)平臺(tái)之間路徑規(guī)劃的實(shí)時(shí)性需求。由圖5可知,AUV可以有效避開障礙物O1和障礙物O2,AUV在位置 (83.20,103.01)處進(jìn)入AUV與水下移動(dòng)平臺(tái)對(duì)接的第2階段,最終在(100.00,166.50)處完成對(duì)接任務(wù)。由圖6可知,AUV的縱向速度越來越大,在60 s左右達(dá)到Vmax,AUV在114 s左右進(jìn)入AUV與水下移動(dòng)平臺(tái)對(duì)接的第2階段,在160 s左右完成對(duì)接任務(wù)。由圖7可知,AUV最終以航向角偏差φAG≈3°的航向姿態(tài)與水下移動(dòng)平臺(tái)完成對(duì)接,滿足對(duì)接要求。
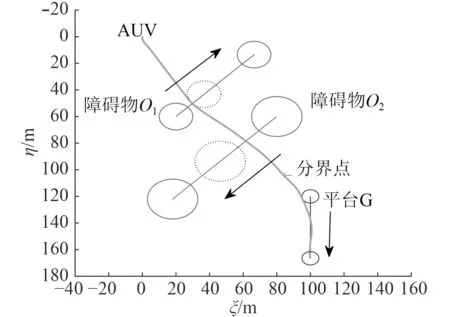
圖 5 實(shí)時(shí)規(guī)劃路徑圖Fig. 5 Real-time path planning map

圖 6 AUV速度曲線Fig. 6 The velocity curve of AUV
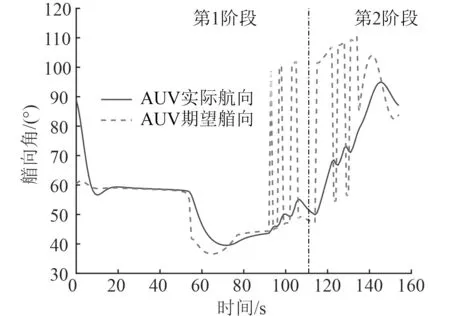
圖 7 AUV航向曲線Fig. 7 The heading curve of AUV
6 結(jié) 語
以往的大多數(shù)路徑規(guī)劃算法只考慮目標(biāo)點(diǎn)的到達(dá)問題,沒有考慮AUV到達(dá)目標(biāo)點(diǎn)的姿態(tài)需求。本文針對(duì)復(fù)雜動(dòng)態(tài)環(huán)境下AUV與水下移動(dòng)對(duì)接平臺(tái)的實(shí)時(shí)性和終端姿態(tài)需求,提出一種基于MILP的實(shí)時(shí)路徑規(guī)劃方法。充分考慮了障礙物約束、AUV本體約束,根據(jù)多個(gè)對(duì)接階段的需求設(shè)計(jì)了距離收斂、時(shí)間最優(yōu)和姿態(tài)最優(yōu)等不同的目標(biāo)優(yōu)化函數(shù),建立了移動(dòng)對(duì)接目標(biāo)函數(shù),形成相應(yīng)的多約束線性規(guī)劃模型,實(shí)現(xiàn)對(duì)AUV加速度優(yōu)化。仿真結(jié)果表明,該算法能滿足AUV與水下移動(dòng)對(duì)接平臺(tái)的實(shí)時(shí)性和終端姿態(tài)需求。
AUV的期望航向在路徑規(guī)劃的后半程存在劇烈變化,分析可知,這是由于AUV參數(shù)的設(shè)計(jì)不太恰當(dāng)導(dǎo)致的,需要進(jìn)一步改進(jìn)。下一步需要考慮海流對(duì)AUV和水下移動(dòng)對(duì)接平臺(tái)運(yùn)動(dòng)的影響,以便更好地滿足實(shí)際工程需要。
猜你喜歡
房地產(chǎn)導(dǎo)刊(2021年6期)2021-07-22 09:12:46
中國(guó)石油石化(2021年9期)2021-07-17 09:24:00
中國(guó)農(nóng)民合作社(2020年12期)2020-12-18 09:09:58
公民與法治(2020年11期)2020-07-25 02:02:06
河南水利年鑒(2020年0期)2020-06-09 05:43:30
領(lǐng)導(dǎo)決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
制造技術(shù)與機(jī)床(2017年3期)2017-06-23 08:11:34
中國(guó)衛(wèi)生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41