一種低成本高可靠性IPMSM啟動方法
2020-11-26 09:21:12范立榮黃景鵬
通信電源技術 2020年15期
范立榮,黃景鵬
(廣東交通職業技術學院 汽車與工程機械學院,廣東 廣州 510650)
0 引 言
永磁同步電機由于沒有轉子繞組,相比直流同步電機,具有體積小、重量輕、效率高、慣量小和控制精度高特點[1],使其在冶金、橡膠以及家電等領域獲得了廣泛應用。而對永磁同步電機的控制主要采用無位置速度傳感器實現,既可以降低成本,也可以提高系統的可靠性。
在永磁同步電機的多種控制方案中,最簡單實用的是進行矢量控制。由于引入了坐標變換,電機的轉矩分量和勵磁分量得以獨立控制[2]。但是,由于矢量控制在低速啟動時電機定子上存在壓降,會導致無法獲得足夠大的啟動轉矩。因此,對永磁同步電機的控制需要在啟動方法上進行加以引導,使其能順利切換至閉環運行。
1 轉子初始預定位法
傳統無位置傳感器控制算法在零速和低速情況下無法準確檢測轉子位置。在永磁同步電機位置估算方法中,多數控制算法是利用電機中高速時的電機反電動勢來估算轉子位置。因為反電動勢里包含轉子位置信息,但在低速情況下同步電機旋轉所產生的反電動勢非常小,甚至低于逆變器的開關損耗壓降。因此,低速情況下無法通過反電動勢估算轉子位置[3]。電機在啟動過程中若檢測不到轉子位置,很容易造成失步或過流而造成啟動失敗。因此,針對永磁同步電機常規啟動出現的問題進行了優化,提出了一種低成本高可靠性的轉子預定位+I/F電流開環矢量控制系統,具體控制方法如圖1所示。
對圖1中的控制流程進行算法控制。首先,程序開始進行預定位,令θ=-90°,Id為一定正值,Iq=0。其次,設定定時時間,使其在定時時間內角度平滑遞增至0°,再進行I/F開環啟動至合適速度切換至閉環運行,軟件控制流程如圖2所示。
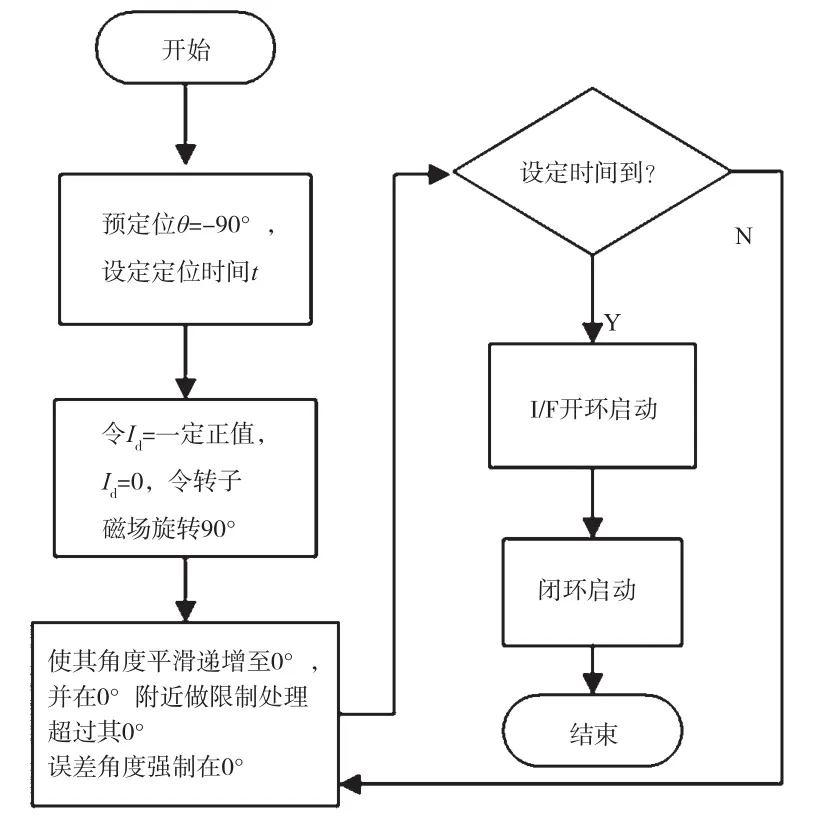
圖2 預定位軟件算法流程
2 MATLAB/Simulink仿真模型的搭建
為了驗證此算法有效,下面進行MATLAB/Simulink系統的搭建并仿真。系統采用無位置速度傳感器矢量結構,由轉速電流雙閉環構成,外環為轉速環,內環分為Id、Iq電流環,分別控制磁場轉矩和電磁轉矩,而估算的轉子角度θest及ωest分別由系統采樣電機定子電流變換而來的Vα、Vβ、Iα、Iβ得到。系統整體運行結構如圖3所示。
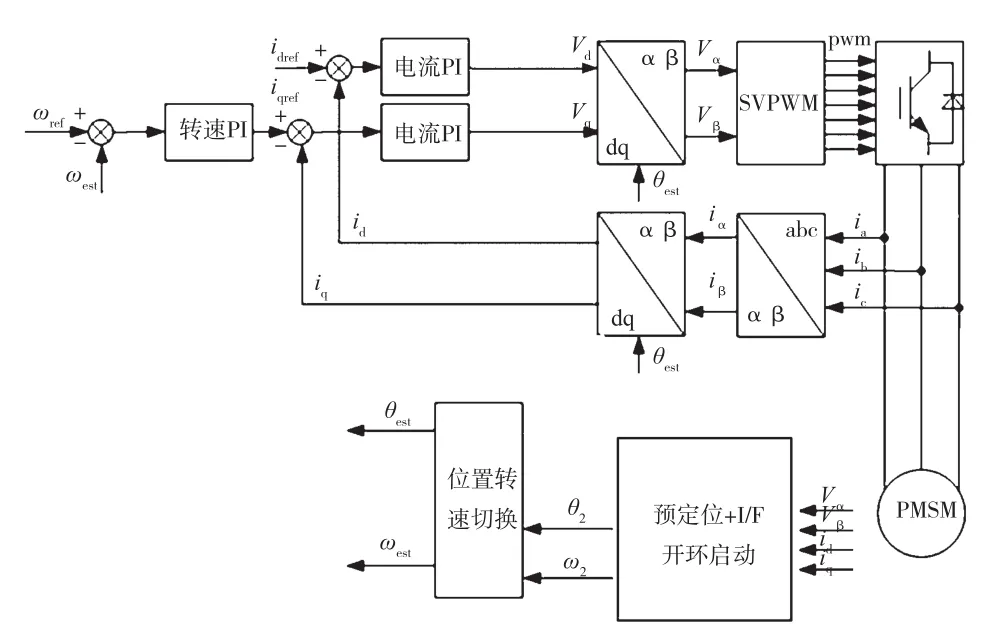
圖3 基于預定位+I/F無位置速度傳感器矢量控制系統框圖
該系統搭建的MATLAB/Simulink仿真系統,如圖4所示。
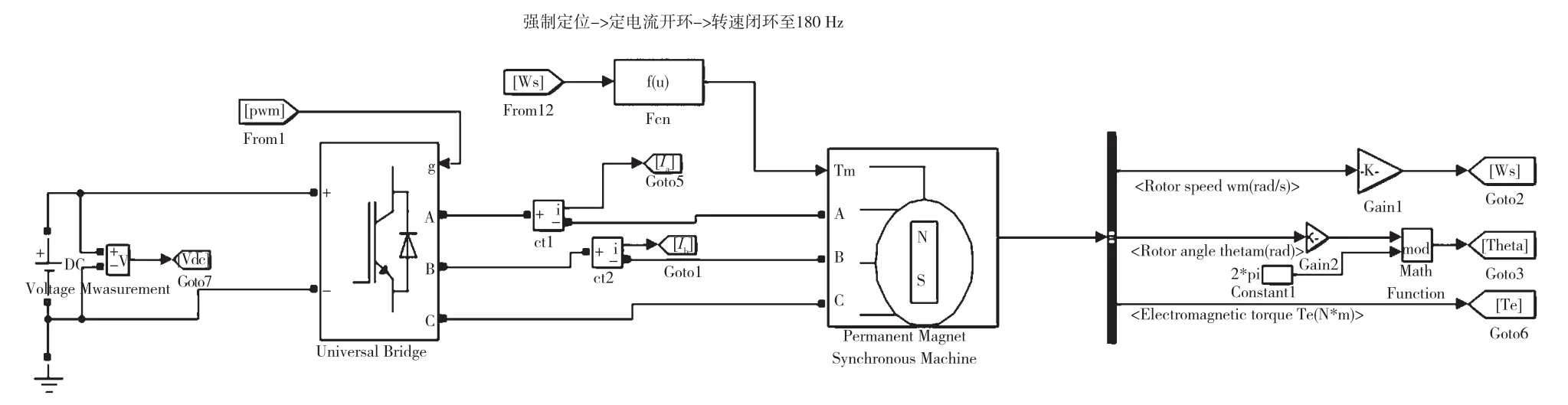
圖4 預定位無位置速度傳感器矢量控制仿真系統
主電路由輸入直流DC經過3相逆變后驅動永磁同步電機。電機參數:額定功率P=1.25 kW;額定電壓=380 V;極對數=2;定子電阻RS=0.35 Ω;定子d軸電感Ld=5.2 mH;定子q軸電感Lq=11.9 mH;磁鏈ψ=0.113 493 wb,轉動慣量J=0.004 06 kg·m2。此外,設置初始角頻率、轉子角度、定子電流均為0,具體設置如圖5所示。
預定位+I/F算法由Control Unit模塊實現,系統輸入參數由輸入母線電壓Vdc、系統采樣得到的電機定子輸入電流Ia和Ib、轉子實際轉速Ws及轉速θ構成。常數模塊Const=100 Hz作為設定電機電頻率(由于極對數為2,實際機械頻率為50 Hz)。具體實現框圖如圖6所示。
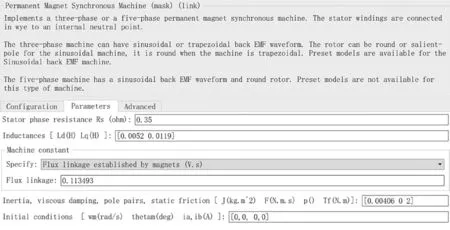
圖5 永磁同步電機參數設置
系統采樣離散仿真,開關器件開關頻率設為10 kHz,死區時間設為2 μs。為了控制變量范圍,輸入輸出變量均采用標幺值進行換算。電壓標幺基準值為500 V,電流標幺基準值為25 A,具體設置如圖7所示。
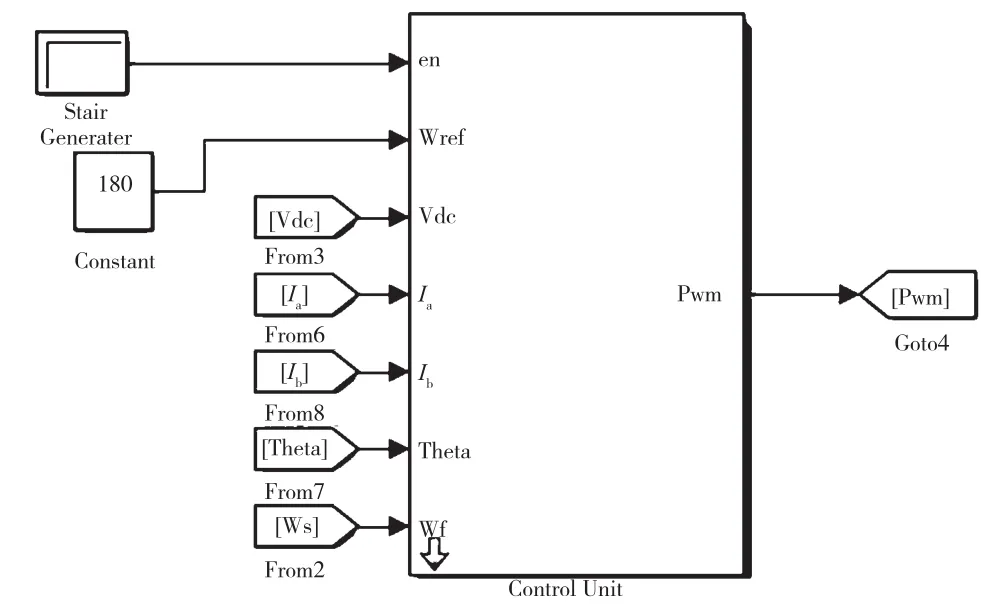
圖6 預定位I/F算法框圖
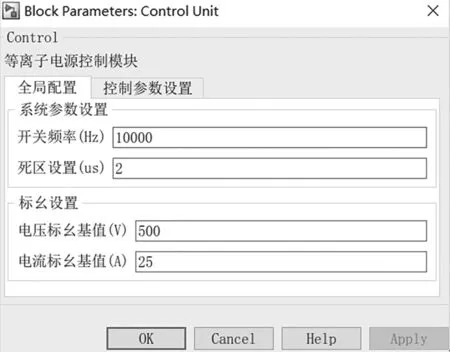
圖7 預定位I/F算法框圖
3 系統仿真
SVPWM發生模塊是實現矢量控制的關鍵模塊,由輸入電機定子電流Ia和Ib進行clark變換、Park變換及反Park變換,將與clark變換后得出的三相交流正弦矢量電壓ton作為調制波。作為與三角載波相比較的輸入信號,輸出的調制波與三角載波比較延遲后,得出6路SVPWM波形。SVPWM具體實現框圖如圖8 所示[4]。
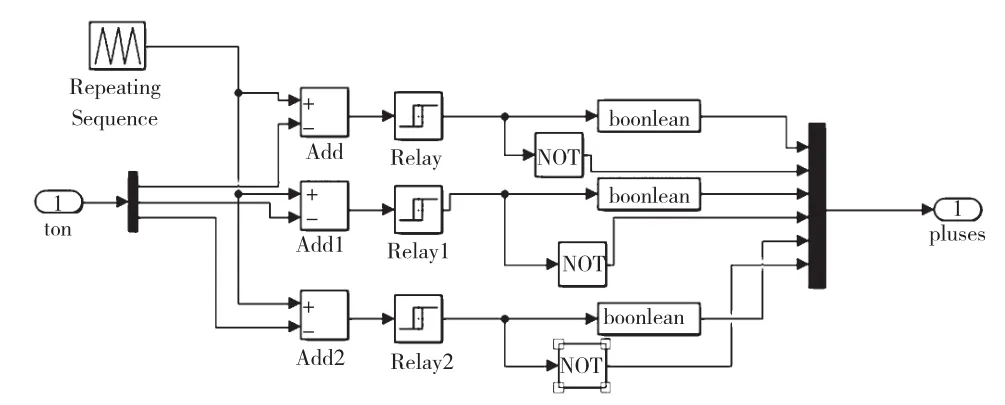
圖8 SVPWM發生模塊
所有上述參數設置及模塊完成后,設置仿真為Discrete仿真,時間為1e-6,負載隨頻率變化函數。為滿足最高頻率能在滿負荷工作,設定負載TL=0.54×10-4×f2N·m,終止仿真時間為10 s,仿真結果如圖9所示。其中,圖9(a)為永磁同步電機定子電流Ia和Ib的仿真波形,圖9(b)為電機電頻率波形,圖9(c)為電機轉子角度波形,圖9(d)為電磁轉矩波形圖。
從圖9(a)~圖9(d)可以看出,定子電流從0~1 s強制定位,角度都集中在0°附近。而1~4 s I/F為指定電流大小,進行開環運行后切換至閉環運行,轉子角度無突變,轉速波動小,對應電磁轉矩除啟動時有些脈動,穩定后脈動很小;4 s直接切換至閉環反電動勢觀測器運行;4~8 s后,升頻轉矩增大,至8 s后穩定。定子電流從定位→開環→閉環運行,切換過程無過沖失步,拖拉開環啟動過程中相電流的頻率和大小保持不變,使得壓縮機在負荷輕或負荷重的情況都能可靠啟動,充分驗證了提出的預定位無位置速度傳感器矢量控制算法的可靠性與可行性。
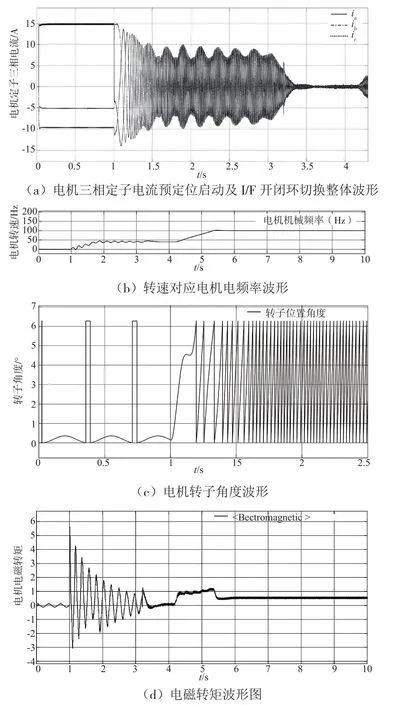
圖9 電機定子電流、轉速、轉子角度及電磁轉矩波形
在powergui中進行FFT頻譜分析,分析從電機穩定運行至額定頻率100 Hz即起始時間從9 s開始后的5個周期(即從切換到閉環至穩定運行時間段)。基準頻率選取100 Hz(2對極,機械頻率為50 Hz),分析至最大2 kHz,即分析40次諧波。ScopeData是一個矢量,存儲了定子電流Ia、Ib。隨機抽取一個定子電流input1,在其運行穩定后對其做FFT分析,定子電流的諧波分析頻譜圖如圖10所示。
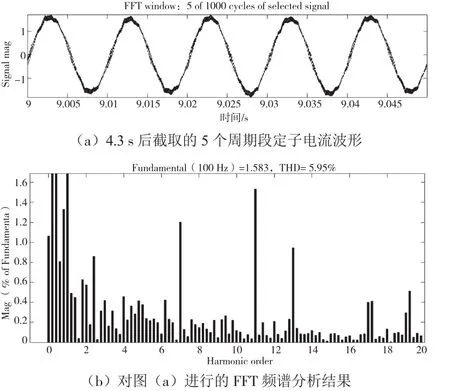
圖10 定子電流諧波頻譜圖
從圖10可以看出,諧波含量是0.059 5,基波幅值1.583 A,諧波含量低,對EMC造成的干擾及系統振動較小。
4 結 論
提出的轉子初始預定位+I/F開閉環無位置速度傳感器矢量控制系統,在MATLAB上編寫C語言程序搭建模型進行仿真,驗證了電機各關鍵參數波形運行良好。電機定子電流預定位→開環→閉環切換平穩,啟動過程電流無沖擊,電機轉矩波動小,能適應不同負載下的啟動,對永磁同步電機應用企業有很強的實踐指導意義。從仿真結果可以看出,基于轉子初始預定位+I/F開閉環無位置速度傳感器矢量控制系統,定子電流波形為正弦波,電流諧波和轉矩脈動小,可見該方案在永磁同步電機調速系統中具有可行性。
