一種雷達(dá)導(dǎo)引頭天線罩斜率誤差實(shí)時估計方法
2020-11-26 07:39:44周荻李君龍袁宇祺
現(xiàn)代防御技術(shù) 2020年5期
關(guān)鍵詞:測量
周荻,李君龍,袁宇祺
(1.哈爾濱工業(yè)大學(xué) 控制工程系,黑龍江 哈爾濱 150001;2.北京電子工程總體所,北京 100854)
0 引言
導(dǎo)引頭天線罩對電磁波的折射和反射作用影響導(dǎo)引頭天線的測量精度,使其指向一個虛假的目標(biāo)方向,造成瞄準(zhǔn)誤差,引起導(dǎo)彈脫靶增加。
李瑞等人[1]通過對控制系統(tǒng)的合理簡化,提出了一種基于比例導(dǎo)引律的導(dǎo)引頭天線罩瞄準(zhǔn)線誤差斜率的簡化計算方法。祁琪等人[2]建立了基于抖動信號的天線罩誤差估計模型。顧炳良[3]運(yùn)用二維射線軌跡法計算了天線罩的瞄準(zhǔn)線誤差和傳輸系數(shù)。Zarchan等[4]利用無損高頻抖動信號來估計和補(bǔ)償瞄準(zhǔn)線誤差。Rong等人[5]基于平面波譜曲面積分?jǐn)?shù)字仿真的方法來計算瞄準(zhǔn)線誤差。陳意芬等人[6]通過遺傳算法尋找一個導(dǎo)引控制器。繆雪佳等人[7]提出了一種負(fù)反饋偏置的補(bǔ)償方法,在導(dǎo)引頭輸出處加上一個與天線罩誤差斜率相關(guān)的正的彈體姿態(tài)角速率信號,以減弱正反饋的影響。曾憲偉等[8]建立了視線角速度估計模型,提出了一種天線罩誤差斜率修正的視線角速度估計算法。劉元云[9]、居加祥[10-11]等人選擇尋零法測試天線罩的電性能,采用分段二階線性擬合的方法得到天線罩誤差補(bǔ)償模型。劉軍等人[12]介紹了一種基于DSP處理器的導(dǎo)彈天線罩瞄準(zhǔn)線誤差補(bǔ)償系統(tǒng)。Yueh[13]提出了一個帶有內(nèi)部學(xué)習(xí)程序的卡爾曼濾波器組合。Lin等[14]通過引入帶通濾波器機(jī)制來預(yù)測天線罩誤差,并在導(dǎo)彈制導(dǎo)回路中加入無損高頻抖動信號來對誤差進(jìn)行補(bǔ)償。安相宇等人[15]提出了一種基于推廣卡爾曼濾波的方法估計天線罩誤差斜率。Gurfil等[16]則把兩步濾波方法應(yīng)用于天線罩誤差斜率估計問題。Han S K[17]、Lin[18]等人利用交互式多模型卡爾曼濾波方式估計天線罩誤差。宗睿[19-20]基于極點(diǎn)配置自校正理論提出了一種天線罩寄生回路的在線補(bǔ)償方法。
本文提出在極坐標(biāo)系中建立精確的目標(biāo)-導(dǎo)彈相對運(yùn)動模型和測量模型,采用推廣Kalman濾波器對天線罩誤差斜率和視線角速率進(jìn)行聯(lián)合估計,從而獲得較高的制導(dǎo)精度。
1 考慮導(dǎo)引頭天線罩誤差斜率的目標(biāo)-導(dǎo)彈相對運(yùn)動問題數(shù)學(xué)描述
1.1 考慮導(dǎo)引頭天線罩誤差斜率的相對運(yùn)動問題三通道數(shù)學(xué)描述
1.1.1 目標(biāo)-導(dǎo)彈相對運(yùn)動模型
目標(biāo)-導(dǎo)彈視線運(yùn)動動力學(xué)方程投影到視線坐標(biāo)系可以表示為[21]
(1)
式中:r為目標(biāo)-導(dǎo)彈相對距離;qε為視線俯仰角,表示視線(Ox4軸)與慣性參考系側(cè)向平面Oxz之間的夾角。若視線在側(cè)向平面之上,則qε為正,反之為負(fù);qβ為視線偏航角,表示視線在慣性參考系側(cè)向平面Oxz上的投影與Ox軸之間的夾角。迎Oy軸頂視,若Ox軸逆時針轉(zhuǎn)到投影線上,則qβ為正,反之為負(fù);ar,aε和aβ分別為導(dǎo)彈加速度在視線坐標(biāo)系3個軸上的分量,可以用慣導(dǎo)系統(tǒng)測量得到;atr,atε和atβ分別為目標(biāo)加速度在視線坐標(biāo)系3個軸上的分量。針對固定目標(biāo),atr=0,atε=0,atβ=0。
1.1.2 導(dǎo)引頭測量模型

(2)
(3)
式中:C0→4為從慣性系到視線系的轉(zhuǎn)換矩陣。
根據(jù)各坐標(biāo)系之間的轉(zhuǎn)換關(guān)系
(4)
式中:C0→1為從慣性系到彈體系的轉(zhuǎn)換矩陣。
視線相對于彈體系所成的角度可表示為
Δqε=arcsinc1y=arcsin[C0→1(2,1)cosqεcosqβ+
C0→1(2,2)sinqε-C0→1(2,3)cosqεsinqβ],
(5)
(6)
在考慮導(dǎo)引頭天線罩斜率誤差的情況下,導(dǎo)引頭測量的視線相對于彈體系所成的角度可以描述為
Δqε=(1+bε)arcsin[C0→1(2,1)cosqεcosqβ+
C0→1(2,2)sinqε-C0→1(2,3)cosqεsinqβ],
(7)
(8)
式中:bε和bβ分別為俯仰通道和偏航通道的天線罩瞄準(zhǔn)誤差斜率。
在實(shí)際飛行中,由于環(huán)境因素的影響,天線罩瞄準(zhǔn)誤差斜率是隨機(jī)變化的,所以將其變化過程視為隨機(jī)高斯白噪聲,即
(9)
(10)
式中:wε和wβ分別為導(dǎo)引頭測量機(jī)構(gòu)俯仰通道和偏航通道的高斯白噪聲。
1.1.3 狀態(tài)方程
狀態(tài)方程包括以下內(nèi)容:
(11)
(12)
1.1.4 測量方程
導(dǎo)引頭的測量量為r,Δqε和Δqβ,考慮式(8)和(9),測量方程寫作
(13)
1.2 縱向通道考慮天線罩誤差斜率的目標(biāo)-導(dǎo)彈相對運(yùn)動問題數(shù)學(xué)描述
1.2.1 縱向通道考慮天線罩誤差斜率的目標(biāo)-導(dǎo)彈相對運(yùn)動數(shù)學(xué)模型
由完整的數(shù)學(xué)模型(12)和(13),忽略式(12)中偏航通道狀態(tài)量x7對俯仰通道的影響,可得仰通道的狀態(tài)方程為
(14)
測量方程為
(15)
式中:qβ視作外來的已知量。
如果忽略側(cè)向通道的視線運(yùn)動和姿態(tài)運(yùn)動,即假設(shè)qβ,ψ和γ均約等于0,則俯仰通道測量方程可以簡化為
(16)
1.2.2 縱向通道聯(lián)合估計視線角速率和天線罩誤差斜率的數(shù)學(xué)模型
對俯仰通道考慮天線罩誤差斜率的目標(biāo)-導(dǎo)彈相對運(yùn)動數(shù)學(xué)模型(14)和(15)進(jìn)一步做簡化處理。
(17)
測量方程降低到1維,即只有角度測量信息:
y1=(1+x3)arcsin[C0→1(2,1)cosx1cosqβ+
C0→1(2,2)sinx1-C0→1(2,3)cosx1sinqβ],
(18)
而在忽略側(cè)向通道的視線運(yùn)動和姿態(tài)運(yùn)動,即假設(shè)qβ,ψ和γ均約等于0的情況下,式(18)簡化為
y1=(1+x3)(x1-?).
(19)
2 天線罩誤差斜率及視線角速率聯(lián)合估計問題的可觀性分析
2.1 非線性狀態(tài)模型可觀性分析
首先,研究俯仰通道考慮天線罩誤差斜率的目標(biāo)-導(dǎo)彈相對運(yùn)動數(shù)學(xué)模型和所構(gòu)成的觀測系統(tǒng)的可觀性。
經(jīng)驗證,該矩陣秩為5,所以該系統(tǒng)可觀。
2.2 線性時變狀態(tài)模型可觀性分析
由公式(17)和(19)觀測系統(tǒng)的可觀性模型。
(20)
經(jīng)驗證,該矩陣秩為3,所以系統(tǒng)可觀。
3 天線罩誤差斜率及視線角速率聯(lián)合估計推廣Kalman濾波器設(shè)計
3.1 縱向通道聯(lián)合估計視線角速率和天線罩誤差斜率Kalman濾波器
(21)

令狀態(tài)向量Xε=[x1x2x3]T,uε=aε。將式(2)這一線性時變系統(tǒng)離散化后得到
Xε(k+1)=Φε(k)Xε(k)+Βε(k)uε(k),
其中,
由于模型誤差等原因,在上式中加入一個零均值高斯隨機(jī)過程向量ηε(k),得到
Xε(k+1)=Φε(k)Xε(k)+Βε(k)uε(k)+ηε(k).
(22)
測量方程取導(dǎo)引頭測量得到的視線相對彈體系所成的角度:
y1=(1+x3)arcsin[C0→1(2,1)cosx1cosqβ+
C0→1(2,2)sinx1-
C0→1(2,3)cosx1sinqβ]+υ(k),
(23)
式中:υ(k)為一個零均值高斯隨機(jī)過程。
將式(23)這個非線性測量方程寫作
yε(k)=h(Xε(k))+υ(k).
(24)
式中:
h(Xε(k))=(1+x3)arcsin[C0→1(2,1)cosx1cosqβ+
C0→1(2,2)sinx1-
C0→1(2,3)cosx1sinqβ].
(25)
又設(shè)
(26)
(27)
設(shè)計俯仰通道推廣Kalman濾波器為
(28)

(29)

(30)
3.2 側(cè)向通道聯(lián)合估計視線角速率和天線罩誤差斜率Kalman濾波器設(shè)計

(31)
(32)
(33)
(34)
而導(dǎo)引頭天線罩誤差斜率的初始估計值取bε=0。
4 天線罩誤差斜率及視線角速率聯(lián)合估計問題的數(shù)學(xué)仿真
4.1 仿真條件
考察1條對地攻擊導(dǎo)彈的末制導(dǎo)飛行彈道。末制導(dǎo)初始時刻(t0=120 s)導(dǎo)彈在慣性系中的初始位置x,y,z,速度vx,vy,vz,俯仰角?,偏航角ψ,滾轉(zhuǎn)角γ,以及姿態(tài)角速度ωx,ωy,ωz如表1所示。
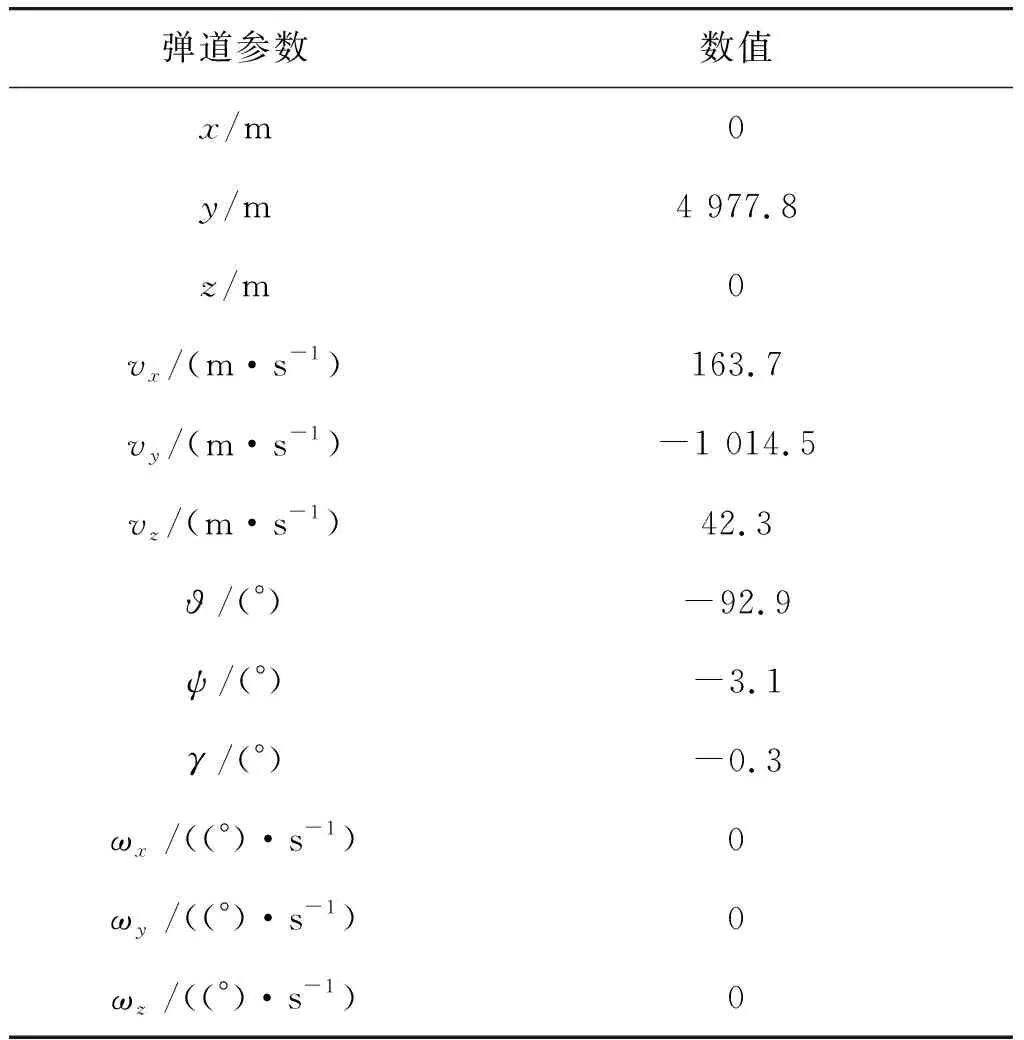
表1 末制導(dǎo)初始時刻導(dǎo)彈狀態(tài)Table 1 Missile status at the initial instant of terminal guidance
導(dǎo)彈慣導(dǎo)系統(tǒng)的數(shù)據(jù)更新周期為2.5 ms,控制周期為2.5 ms,慣導(dǎo)系統(tǒng)的3個初始姿態(tài)角誤差分別用均方根為0.05°的高斯白噪聲描述,慣導(dǎo)系統(tǒng)的初始速度在慣性參考系中的3個分量的誤差用在-0.2~0.2 m/s之間均勻分布的白噪聲描述,加速度計的誤差用標(biāo)準(zhǔn)差為4×10-5g的零均值高斯白噪聲描述。
導(dǎo)引頭采樣周期為20 ms,測距誤差用σ=3 m的零均值高斯白噪聲描述,縱向和側(cè)向測角隨機(jī)誤差均用σ=0.103 125°的零均值高斯白噪聲描述。導(dǎo)引頭高低測量通道和方位測量通道均有天線罩斜率誤差。在仿真過程中的具體變化情況在后面的仿真結(jié)果圖中提供。
4.2 僅采用視線角速率估計Kalman濾波器無天線罩誤差補(bǔ)償?shù)姆抡娼Y(jié)果
縱向和側(cè)向通道狀態(tài)估計方差陣的初值取為Pε(k)=diag[0.1 0.1],Pβ(k)=diag[0.1 0.1],估量測噪聲方差取為Rε(k)=0.015,Rβ(k)=0.015。動態(tài)噪聲方差陣取為Qε(k)=diag[0 10-3],Qβ(k)=diag[0 10-3]。
在2個通道中均加入了天線罩斜率誤差(radom slope error,RSE)。由于天線罩斜率誤差的影響,制導(dǎo)濾波器乃至整個制導(dǎo)控制系統(tǒng)工作并不理想,最終脫靶量為19.767 m。飛行彈道如圖 1所示。圖2顯示了Kalman濾波器估計出來的視線角速率明顯振蕩,這種帶振蕩的估計值代入到制導(dǎo)律后導(dǎo)致導(dǎo)彈過載制導(dǎo)指令的振蕩和導(dǎo)彈過載的振蕩(見圖3),進(jìn)而又導(dǎo)致了視線角速率真實(shí)值的振蕩(見圖2)。所以,在圖2中,視線角速率真實(shí)值的振蕩滯后于視線角速率估計值的振蕩。
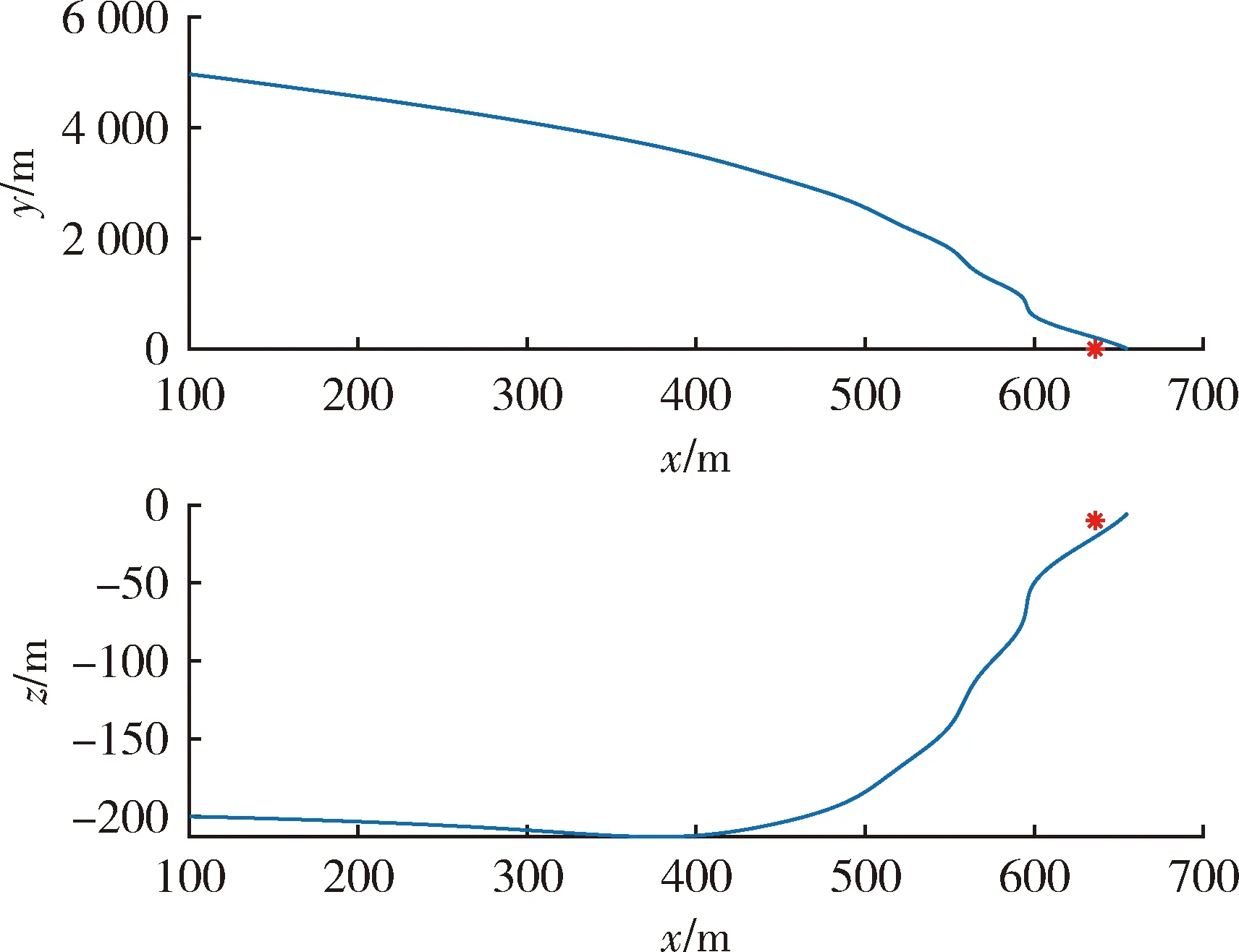
圖1 飛行彈道(無天線罩斜率誤差估計)Fig.1 Flight trajectory (without estimation for RSE)
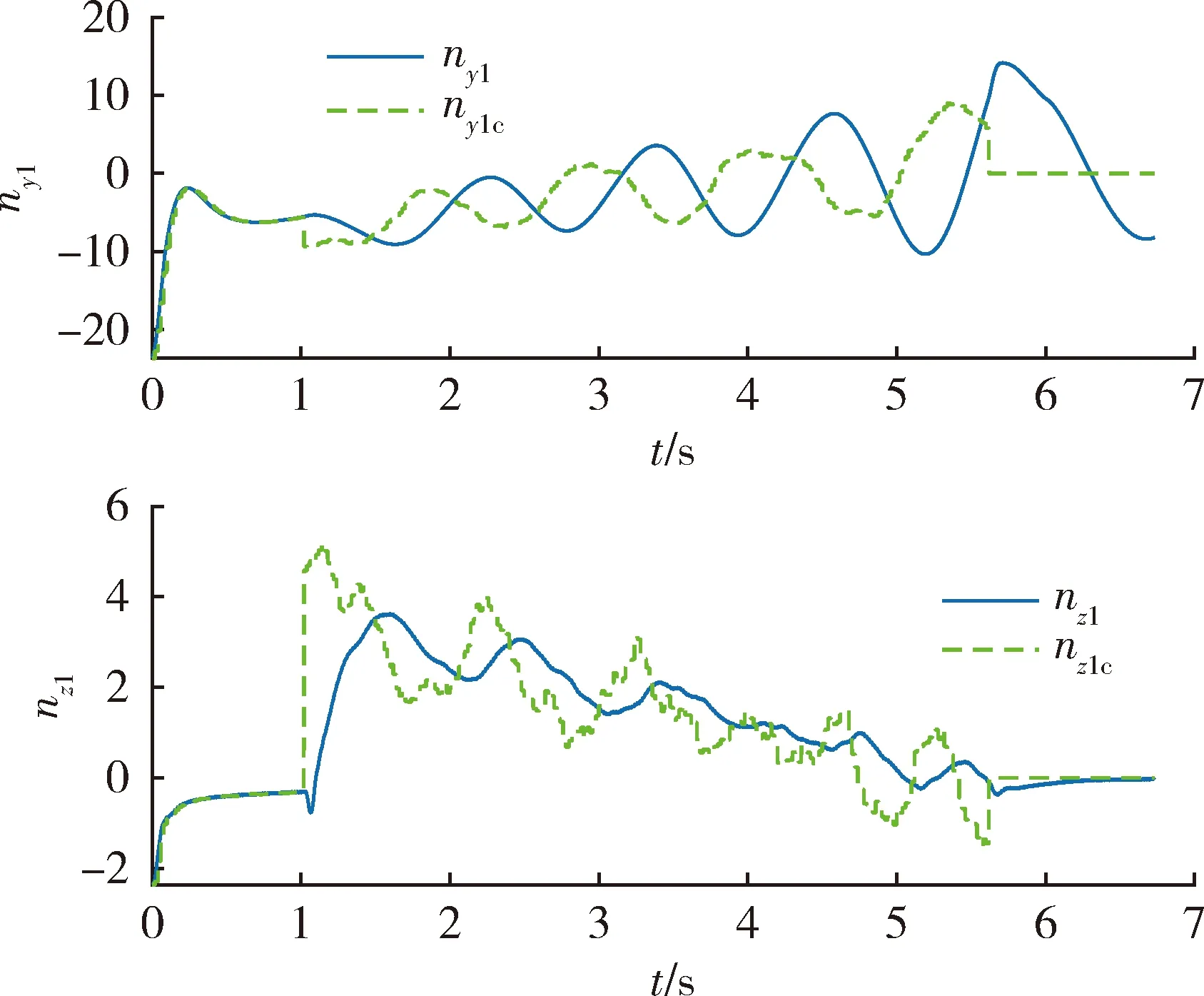
圖3 導(dǎo)彈法向過載(無天線罩斜率誤差估計)Fig.3 Normal acceleration of missile (without estimation for RSE)
從圖4可以看出天線罩斜率誤差的真實(shí)值變化很劇烈,而Kalman估計值為0代表未對該誤差進(jìn)行補(bǔ)償。所以,制導(dǎo)控制系統(tǒng)工作性能不理想。

圖4 天線罩斜率誤差的真實(shí)值和估計值 (無天線罩斜率誤差估計)Fig.4 True and estimated values for radome slope error (without estimation for RSE)
4.3 視線角速率與天線罩誤差斜率聯(lián)合估計Kalman濾波器仿真結(jié)果
在同樣條件的制導(dǎo)控制系統(tǒng)仿真中,縱向通道和側(cè)向通道均采用視線角速率與天線罩誤差斜率聯(lián)合估計Kalman濾波器。
狀態(tài)估計方差陣的初值取為
估量測噪聲方差取為Rε(k)=0.015,Rβ(k)=0.015;動態(tài)噪聲方差陣取為
由于聯(lián)合估計視線角速率和天線罩斜率誤差,制導(dǎo)濾波器工作性能明顯提高,整個制導(dǎo)控制系統(tǒng)工作性能良好,制導(dǎo)精度明顯上升,終端脫靶量只有1.184 9 m。飛行彈道如圖5所示。
聯(lián)合估計后,圖6顯示的聯(lián)合濾波器估計出來的視線高低角速率和視線方位角速率很好地跟蹤了視線高低角速率和視線方位角速率的真實(shí)值。從圖7看出,2個通道中天線罩斜率誤差的估計值的基本趨勢可以跟蹤真實(shí)值的變化情況,雖然它們不一定十分準(zhǔn)確地跟上真實(shí)值,但卻明顯改善了聯(lián)合濾波器對視線角速率的估計精度(見圖6)。從圖8 看出縱向通道和側(cè)向通道過載指令跟蹤效果均很好。上述結(jié)果表明,使用聯(lián)合估計濾波器后,制導(dǎo)控制系統(tǒng)的性能明顯改進(jìn)了。
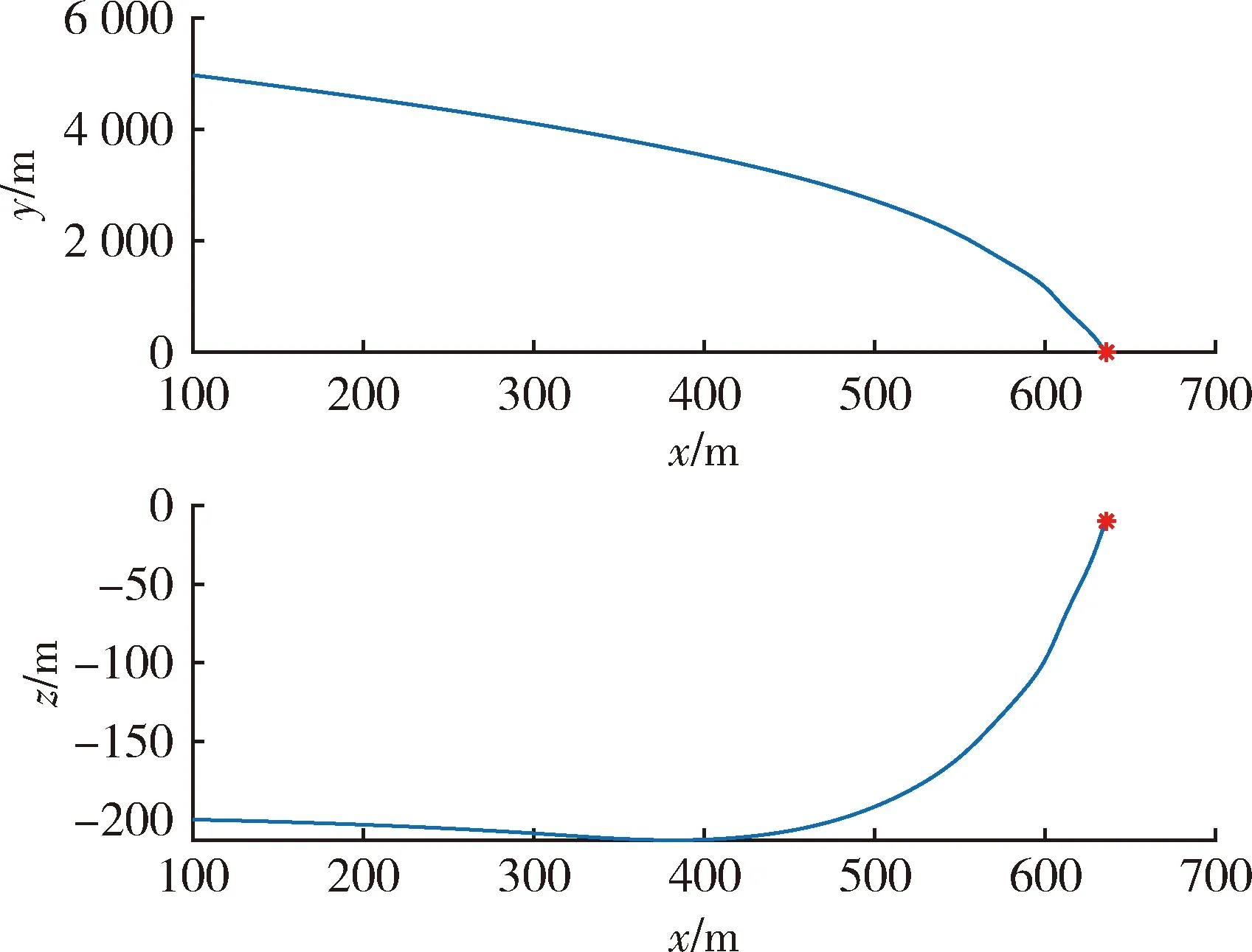
圖5 飛行彈道(有天線罩斜率誤差估計)Fig.5 Flight trajectory (with estimation for RES)
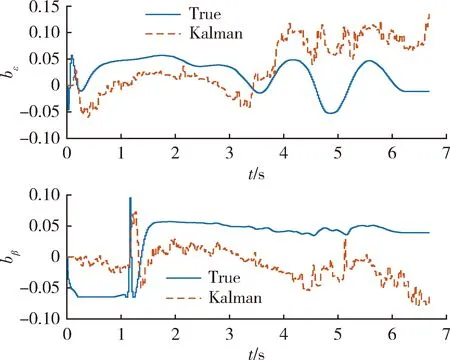
圖7 天線罩斜率誤差的真實(shí)值和估計值 (有天線罩斜率誤差估計)Fig.7 True and estimated values of radome slope error (with estimation for RSE)
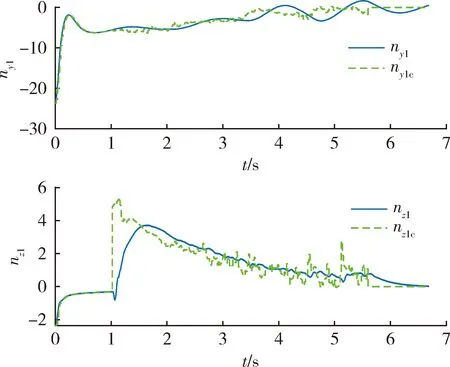
圖8 導(dǎo)彈法向過載(有天線罩斜率誤差估計)Fig.8 Normal acceleration of missile (with estimation for RES)
4.4 Monte-Carlo仿真對比
在前面所述條件下,將僅采用視線角速率估計Kalman濾波器的制導(dǎo)控制系統(tǒng)與采用視線角速率與天線罩誤差斜率聯(lián)合估計Kalman濾波器的制導(dǎo)控制系統(tǒng)進(jìn)行100次Monte-Carlo仿真對比。仿真結(jié)果表明,僅采用視線角速率估計Kalman濾波器的制導(dǎo)控制系統(tǒng)受天線罩誤差斜率的影響很大,脫靶量CEP值達(dá)到20.29 m,而采用視線角速率與天線罩誤差斜率聯(lián)合估計Kalman濾波器的制導(dǎo)控制系統(tǒng)很好地克服了天線罩誤差斜率的影響,脫靶量CEP值3.13 m。
5 結(jié)束語
本文首先建立了完整的考慮導(dǎo)引頭天線罩誤差斜率的目標(biāo)-導(dǎo)彈相對運(yùn)動問題數(shù)學(xué)描述,包括非線性的狀態(tài)方程和測量方程。然后,簡化得到俯仰通道考慮天線罩誤差斜率的目標(biāo)-導(dǎo)彈相對運(yùn)動數(shù)學(xué)模型,又進(jìn)一步推導(dǎo)出俯仰通道聯(lián)合估計視線角速率和天線罩誤差斜率的數(shù)學(xué)模型。應(yīng)用非線性系統(tǒng)可觀性理論,證明了上述數(shù)學(xué)模型對應(yīng)的視線角速率和天線罩誤差斜率聯(lián)合觀測系統(tǒng)的可觀性。
在上述分析的基礎(chǔ)上,設(shè)計了聯(lián)合估計視線角速率和天線罩誤差斜率的推廣Kalman濾波器。在某對地攻擊導(dǎo)彈末制導(dǎo)段全彈道制導(dǎo)控制系統(tǒng)仿真中,應(yīng)用該濾波器進(jìn)行仿真,并與不考慮天線罩誤差斜率的視線角速率估計Kalman濾波器做了仿真對比。仿真結(jié)果表明,聯(lián)合估計視線角速率和天線罩誤差斜率的推廣Kalman濾波器的效果很好,可以顯著提高天線罩誤差斜率情況下的制導(dǎo)精度。
猜你喜歡
小學(xué)科學(xué)(學(xué)生版)(2021年5期)2021-07-22 02:40:06
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學(xué)少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學(xué)少年(2017年2期)2017-04-26 21:58:43
中學(xué)生數(shù)理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學(xué)低年級版)(2015年4期)2015-04-29 00:00:00
