我國首次自主火星探測任務中環繞器的研制與實踐
2020-11-24 03:34:22張玉花王獻忠褚英志朱新波牛俊坡
上海航天 2020年5期
張玉花,王獻忠,褚英志,朱新波,王 偉,3,牛俊坡,3
(1.上海航天技術研究院,上海 201109;2.上海衛星工程研究所,上海 201109;3.上海深空探測技術重點實驗室,上海 201109)
0 引言
自1960 年以來,人類深空探測活動的對象囊括了太陽系所有類型的天體。探測形式也從前期以飛越為主,到繞、落、巡和采樣回等多樣化發展。其中,環繞探測作為著陸、巡視、采樣回探測的基礎,在深空探測中起到舉足輕重的作用。火星作為距離地球最近的類地行星,在國際上一直是探測的熱點。
1960 年,美國和蘇聯在冷戰背景下同時起步,在火星探測領域展開了激烈競爭。截至2020 年9 月,人類共開展了47 次火星探測任務,如圖1 所示。如按時間來劃分,火星探測歷程大致可分為3個階段:第1 階段(1960—1975 年),共實施了25 次任務,主要特征是美、蘇把火星探測作為競技場,掀起了火星探測的一輪高潮;第2 階段(1976—1990年),隨著美、蘇競爭戰略重點轉移,火星探測進入低潮期,僅實施2 次任務;第3 階段(20 世紀90 年代至今),共實施20 次任務,以發展新技術和獲得科學上發現為主要驅動力[1-7],其中,涉及環繞探測的任務有27 次,約占57%,10 次的探測形式是通過一次發射完成環繞、著陸任務。
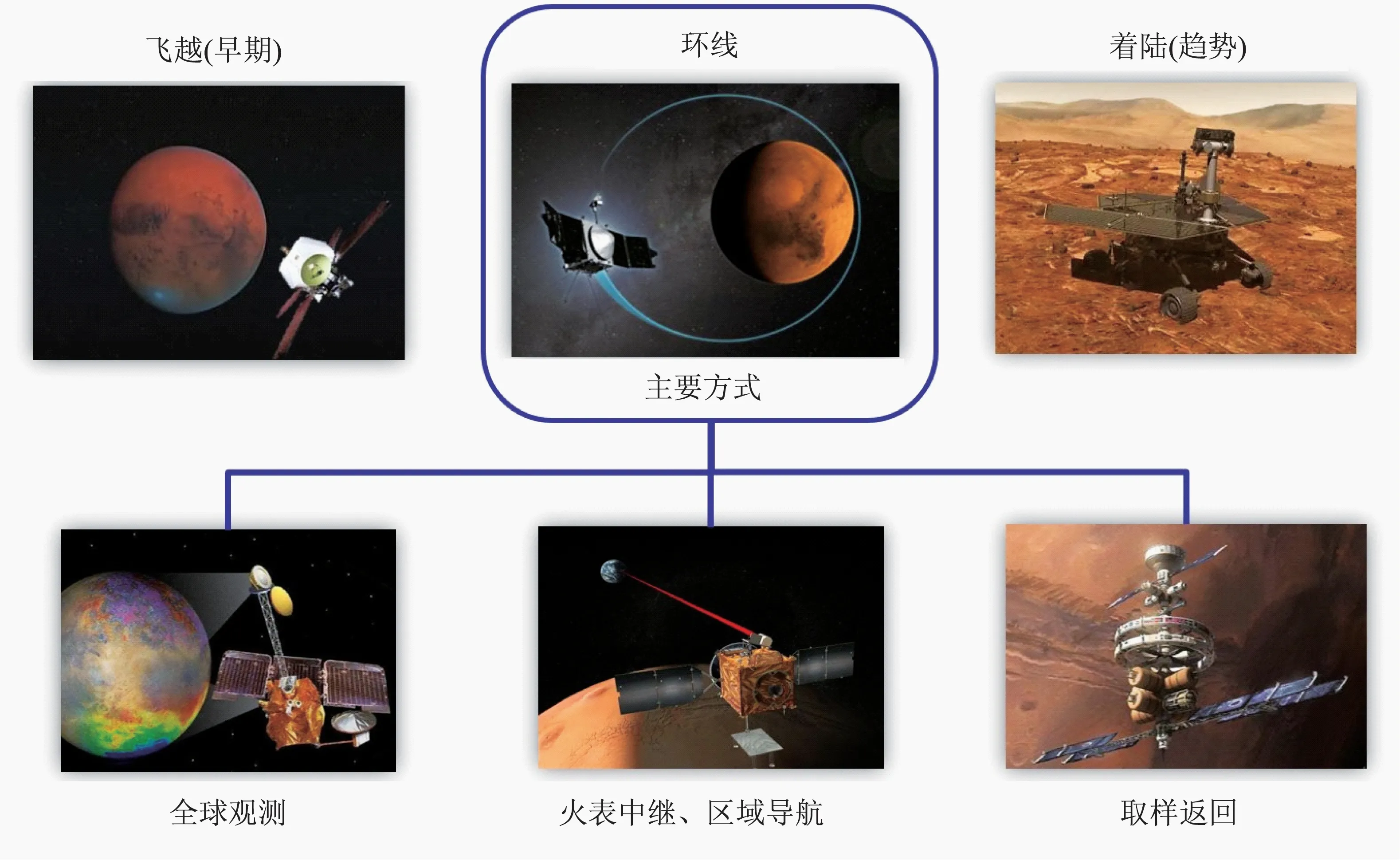
圖1 火星探測主要方式Fig.1 Main methods for Mars exploration
2020 年作為最新的火星發射窗口期,全球有三大火星探測任務:中國“天問一號”探測任務、美國“毅力號”火星車2020 探測任務(Mars2020)、阿聯酋“希望號”火星探測任務[8-12],概念圖如圖2 所示。

圖2 3 個國家的任務概念圖Fig.2 Mars exploration of three countries
美國“毅力號”火星車(Mars2020)于2020 年7 月30 日發射,用于進一步尋找火星生命跡象,測試從火星大氣層中產生氧氣的方法,探測火星地質、環境條件,存儲火星樣本,為未來樣本返回任務做準備[13-16]。阿聯酋“希望號”火星任務是阿聯酋首個行星際、火星探測任務,由阿聯酋航天局聯合美國航空航天局(NASA)和日本JAXA 等全球航天機構合作的火星軌道器于2020 年7 月20 日發射,全面探測火星大氣,研究火星氣候變化、低空天氣變化、沙塵暴預報等,繪制火星詳細地貌和大氣變化情況[17-18]。中國“天問一號”探測任務是中國首次獨立自主開展的行星探測,于2020 年7 月23 日由長征五號遙四運載火箭發射升空,目前正在奔火途中,將一次性完成“繞、著、巡”三項工作,探測起點高、技術難度大[19-21]。
本文主要通過對我國首次自主火星探測器“天問一號”的環繞器在研制和實踐過程中的技術難點及關鍵技術進行歸納總結,梳理未來深空環繞探測的技術發展路線,針對后期的任務需求提出構建深空通用化環繞平臺設想,為我國深空探測的繼承性發展提供參考。
1 環繞器方案概述
火星探測器系統整體構型如圖3 所示,其由火星環繞器和著陸巡視器組成。通過環繞探測,實現火星全球性和綜合性的探測;通過巡視探測,實現火星表面重點地區高精度、高分辨的精細巡視勘查。
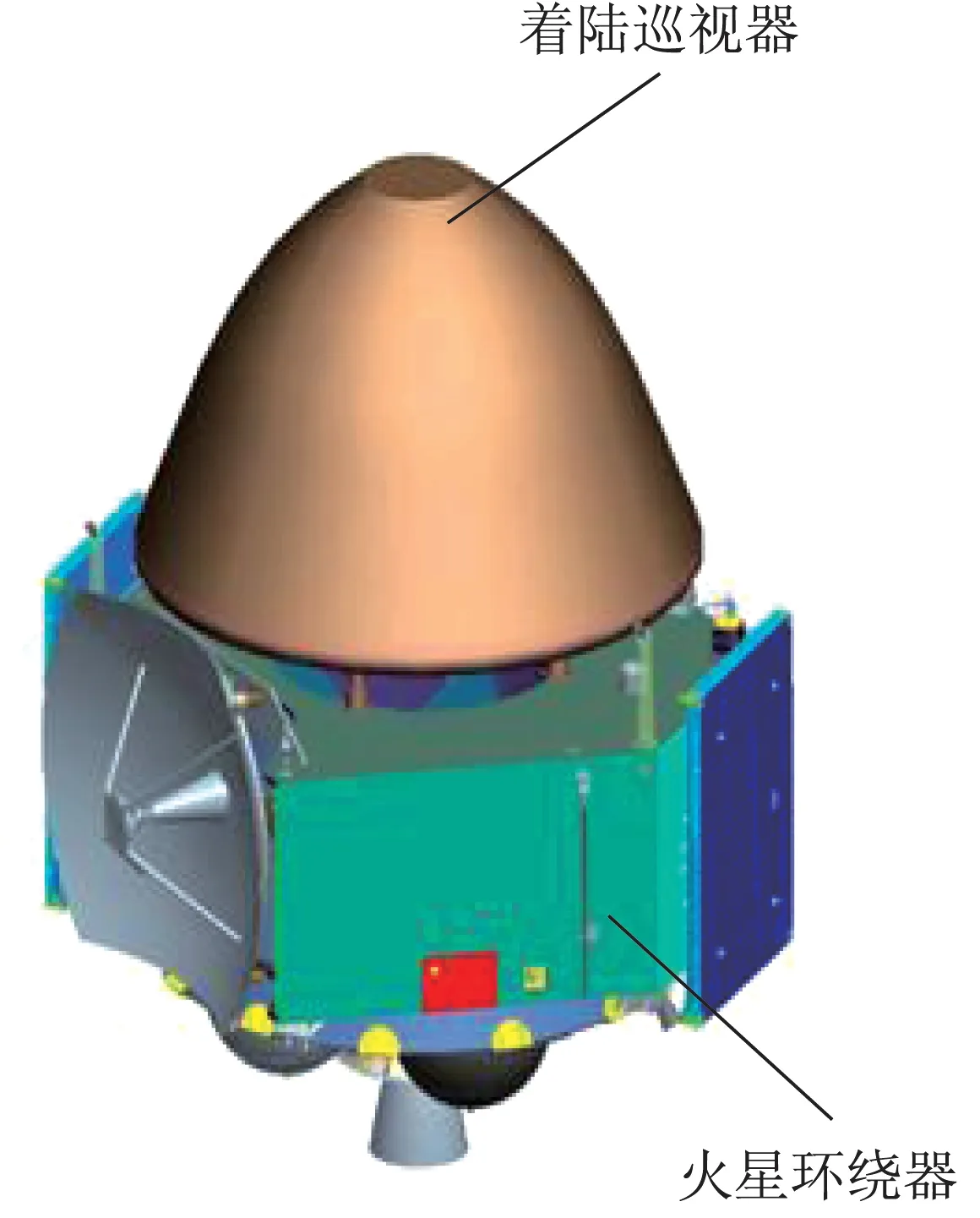
圖3 火星探測器整體構型示意圖Fig.3 Overall configuration of Mars probe
火星環繞器是火星探測器的重要組成部分,承擔了攜帶著陸巡視器,完成地火轉移段軌道修正、火星制動捕獲、環火段軌道調整等任務,進入火星停泊軌道后,進行落區的預探測和進入點位置調整,擇機與著陸巡視器分離,提供著陸巡視器進入、下降、著陸(Entry,Descent and Landing,EDL)過程及火星表面探測過程的中繼支持服務。環繞器進行軌道機動進入遙感軌道,通過攜帶的中分辨率相機、次表層探測雷達等有效載荷開展科學探測。為完成上述探測任務,環繞器主要具備8 大功能:結構支撐與連接功能、姿態軌道測量與控制功能、測控數傳功能、信息管理功能、能源管理功能、熱管理功能、自主管理功能、科學與工程探測功能。
環繞器系統由結構、太陽翼、熱控、制導/導航與控制(Guidance,Navigation and Control,GNC)、推進、綜合電子、測控數傳、定向天線、總體電路、電源、工程測量和有效載荷12 個分系統組成。環繞器構型設計采用“外部六面柱體+中心承力錐筒”的構型,如圖4 所示。
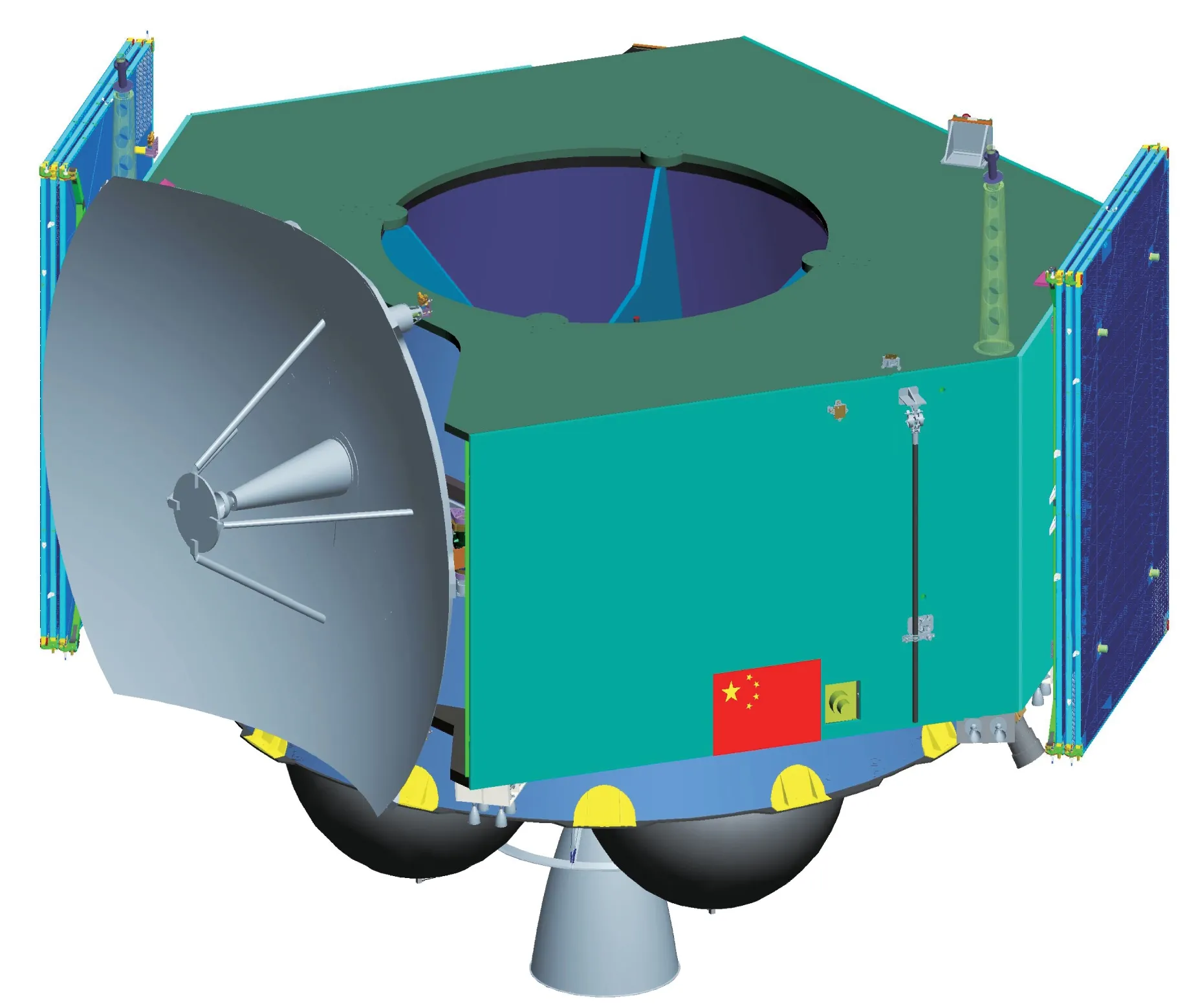
圖4 環繞器收攏狀態構型圖Fig.4 Collapsed state configuration of Mars orbiter
火星環繞器的飛行過程如圖5 所示,主要包括:發射段、地火轉移段、制動捕獲段、軌道調整與中繼通信段以及科學任務段。根據環繞器在全過程飛行中的狀態可以將環繞器的工作模式劃分為發射段模式、巡航飛行模式、中途修正模式、制動捕獲模式、軌道調整模式、火星停泊模式、器器分離模式、中繼通信模式、科學探測模式、日凌模式及應急模式。
2 技術難點與挑戰
作為我國首次自主火星探測任務,火星環繞器的工程研制面臨諸多難點與挑戰。
2.1 缺乏一手的火星環境數據
雖然通過載人航天工程、探月工程和其他重大航天工程實施,積累了一定的地外探測器研制經驗,但是目前對火星空間環境(引力場、磁場、大氣、地形地貌等)的認識仍然不夠,環境數據來源于國外探測結果,缺乏一手的火星探測數據,需要深入調研分析火星探測任務全過程環境要素,開展環境適應性設計,確定技術方案,進行必要的試驗驗證,確保產品選用和系統繼承的正確性,滿足任務最大包絡要求,確保方案可靠、指標裕度充足、對任務要求全覆蓋。
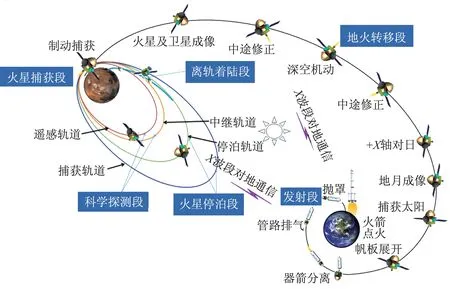
圖5 火星探測器飛行過程示意圖Fig.5 Flight process of Mars probe
2.2 器地距離遙遠
器地距離遠帶來空間損耗高、通信時延大的問題,主要給測控數傳和GNC 方案設計提出了更高要求。器上需要配置大功率行放和大口徑天線,提高等效全向輻射功率(Equivalent Isotropically Radiated Power,EIRP)值,補償遠距離帶來的鏈路損耗,滿足器上數據對地傳輸需求;器上需要配置高靈敏度深空應答機,解決最遠4 億km 的上行遙控指令接收問題。此外,由于距離遠,導致深空探測器無法像地球衛星一樣實現測控天線的全空間對地覆蓋,GNC 分系統必須和測控系統配合,實現各種正常、異常模式下的對地鏈路建立與可靠通信。
2.3 器日距離變化大
器日距離變化大帶來太陽輻照強度變化范圍大的問題,主要對熱控和電源系統設計產生較大影響。整個探測任務期間,探測器和太陽的距離在1.0~1.5 AU 之間變化,太陽輻照強度相應在約1 367~589 W/m2之間變化。導致近地空間時,太陽電池陣功率能力高,近火空間時大幅降低,需要考慮電源系統優化設計和熱管理等問題。此外,太陽輻照強度的大范圍變化,也需要考慮整器的熱控制與管理方案優化設計。
2.4 通信鏈路中斷時間長
通信鏈路中斷時間長將帶來長期無地面測控支持的在軌自主運行問題,主要對環繞器自主管理與控制技術水平提出了新的挑戰。由于地球自轉和天體遮擋等原因,導致器地通信鏈路中斷時間較長。日凌期間,環繞器需要自主在軌運行數十天。環繞器需要解決能源管理、姿態管理和進出日凌的通信管理等幾個方面的問題,確保環繞器無人照料期間的安全。
2.5 制動捕獲機會唯一
由于火星捕獲窗口的唯一性,捕獲的成敗決定了火星探測任務的成敗。但是,由于捕獲時器地距離遠,地面無線電測定軌精度低,并且無法實時監控制動過程,全靠器上自主執行捕獲策略。同時,受限于運載發射能力,探測器攜帶推進劑有限,必須精確判斷并控制開關機時機和時間。由此可見,實現火星制動捕獲,形成環繞軌道技術難度很大。需要制定自主管理策略,優化制動捕獲控制參數,開展充分的仿真與半物理試驗驗證。此外,制動過程中,器上需要具備自主二次點火能力,應對器上突發故障,確保火星捕獲安全可靠。
2.6 器器分離升軌難度高
器器分離階段,環繞器需要在缺乏地面測控支持的情況下,自主完成三次大幅度姿態調整和兩次軌道機動,過程十分復雜。為了建立著陸巡視器要求的高精度進入條件,環繞器需要降軌至撞擊軌道,若升軌異常,則存在墜毀在火星大氣層的風險。此外,在著陸巡視器分離后,環繞器需要建立器器-器地實時轉發的中繼通信鏈路,獲取著陸巡視器進入火星過程的工程數據,這對環繞器控制能力、通信能力都提出了很高的要求。
3 火星環繞器研制情況
3.1 研制歷程
2016 年,我國火星探測任務正式批復立項,基于前期工作同步完成關鍵技術攻關工作,并轉入初樣研制階段。
在初樣階段,火星環繞器根據識別出的火星在軌低溫條件,完成了艙外單機/組件級的低溫儲存、冷熱交變試驗;針對3 000 N 發動機點火、器器分離沖擊,完成了太陽翼、定向天線展開狀態下的沖擊分析及薄弱組件的靜力驗證試驗;針對長期在軌存儲環境,完成了蓄電池、推進系統的長期存儲試驗。各項試驗結果表明,環繞器方案設計滿足各項環境約束,并有一定的裕度。此外,環繞器還完成了測控對接試驗、與運載火箭的器箭分離試驗、與應用系統的對接試驗、與發射場的合練等,驗證了與四大系統之間的接口匹配性和工作協調性。
2018 年,火星環繞器按照研制技術流程完成初樣工作,轉入正樣研制階段。在正樣研制過程中,各分系統完成了產品研制和試驗、復查及設計復核;整器完成了總裝、電性能綜合測試、電磁兼容性(Electromagnetic Compatibility,EMC)試驗、力學試驗、熱試驗;完成了與地面測控、地面應用、運載火箭系統的對接試驗,完成了與測控、地面應用系統的全任務1∶1 聯試,進一步驗證發射狀態下的匹配性。2020 年7 月23 日在文昌航天發射場發射成功,目前在軌運行狀態良好。
3.2 關鍵技術突破情況
結合任務特點和工程實際,環繞器重點突破了6 項關鍵技術。
3.2.1 大承載輕量化復雜構型技術
火星探測器總質量約為5 000 kg,環繞器結構設計面臨結構質量有限、本體包絡尺寸大、運載條件苛刻、承載單機設備多且復雜等多重約束,需通過點式連接承載著陸巡視器載荷,具備攜帶近50%探測器質量推進劑載荷的能力,同時要兼顧大口徑可展開驅動固面天線的布局安裝需求。
為滿足著陸巡視器、太陽翼、定向天線、高分相機、推進貯箱等大部件的安裝與承載,結構構型采取中心承力筒錐筒+六面柱體的構型(如圖6 所示),簡化了傳力路徑;通過大容積并聯式貯箱布局,有效降低了整器質心和與著陸巡視器界面響應;通過非承力部位減重化設計,實現環繞器結構構型的輕量化。靜力試驗結果表明,環繞器結構承載達到設計載荷的130%左右,結構質量占比約6%;振動試驗結果表明,探測器橫向基頻、縱向基頻均滿足運載要求,且器器安裝面的響應滿足設計要求。

圖6 結構關鍵部件設計Fig.6 Design of key components of the structure
3.2.2 火星捕獲與器器分離自主控制技術
火星環繞器工作模式復雜多樣,根據不同階段任務需求,火星環繞器需在對地、對日、對火等模式間進行切換;火星捕獲機會僅一次,捕獲時器地距離單向通信延時超過10 min,為確保任務成功,火星環繞器捕獲制動需具備自主控制能力;器器分離需連續多次姿態機動和自主變軌,著陸器分離精度對姿態、位置測量及控制精度要求非常高,環繞器需及時自主升軌避免撞擊火星。
為了精確控制發動機變軌時點火時長,制定時間與加速度雙關機策略,選取合理的最短、最長點火時長,確保火星捕獲安全和器器分離階段精確的速度增量控制。由于捕獲和器器分離期間地面無法實時控制,為了應對器上突發故障,制定了自主故障診斷與策略切換,捕獲段具備在軌二次點火能力,可基于多數據融合的在線診斷及快速重構,自主規劃新的軌控參數,切換至備份推力器變軌完成變軌任務。此外,為了滿足調姿變軌期間的對地通信、能源獲取、載荷避光等需求,設計了多指向約束的姿態機動路徑自主規劃方法,在復雜的機動過程中滿足不同的約束條件。
3.2.3 火星光學自主導航技術
在捕獲制動階段,器地距離遙遠,地面導航精度與實時性不足。環繞器需要結合器上自主導航手段,快速提供高精度軌道數據。環繞器配置了光學導航敏感器,可實現器上實時軌道測量。光學自主導航在捕獲段采用光學導航敏感器,環火后采用紅外導航敏感器。光學導航敏感器的光學系統在重量約束條件下進行了優化設計,采用恒星姿態識別+硬脈沖校時確保時空對準,采用自適應邊緣提取及偽邊緣剔除和精細亞像素定位技術,實現亞像素級圖像處理。近火捕獲前光學導航敏感器在距離火星100 萬km 時,位置誤差與地面無線電測量精度相當。
紅外導航敏感器采用可見光譜段和長波紅外譜段復合探測方式,如圖7 所示,通過對火星凝視成像,檢測火星圖像邊緣確定其中心相對探測器的視線角度和高度,輔助GNC 分系統完成軌道確定,紅外導航敏感器采用可見光+紅外探測機制,通過基于幾何方法的火星中心像面修正技術和基于亞像素細分的橢圓精確擬合技術,實現高精度的位置估計。
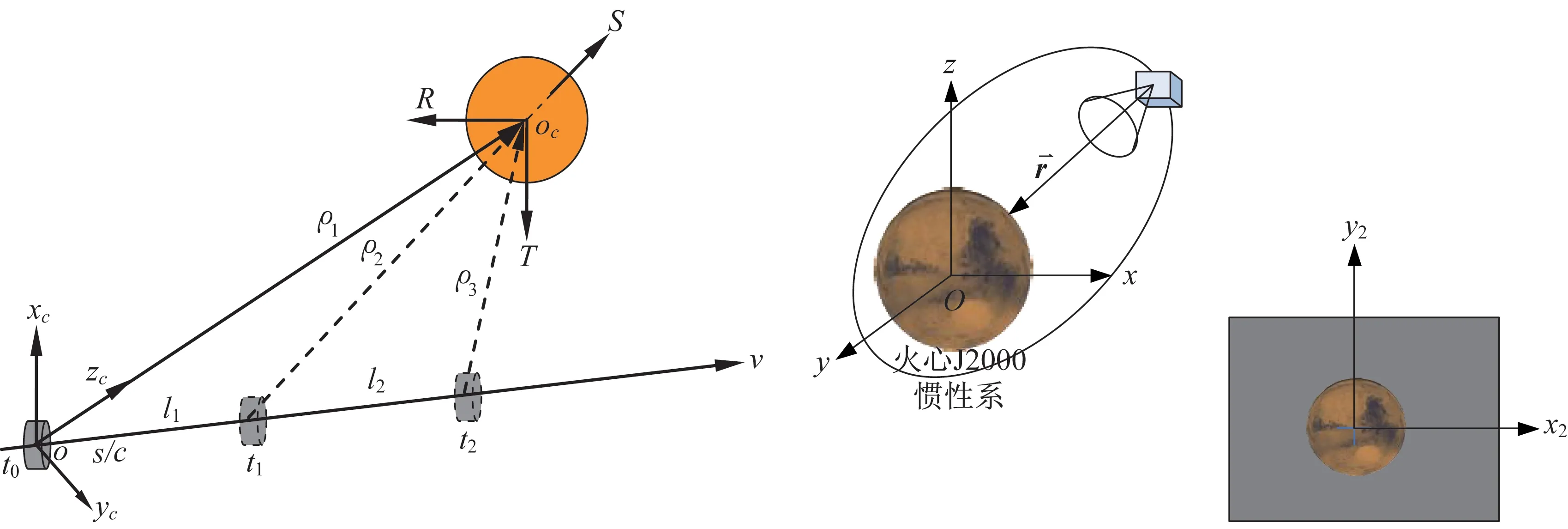
圖7 捕獲段光學與環繞段紅外自主導航方法示意圖Fig.7 Schematic diagram of optical/infrared autonomous navigation method in capture/surround phase
3.2.4 深空長期在軌自主管理技術
火星環繞器在軌飛行時間長,飛行過程中存在日凌/凌日天文現象,而且飛行距離遙遠,器地通信時延很大,制動捕獲和器器分離等關鍵段無法實現實時監控,需要火星環繞器在不同的任務階段實現自身自主管理,主要包括平臺常規自主管理和針對特定任務及故障預案自主管理等兩個方面。平臺常規自主管理,涵蓋自主實現平臺的正常運轉,完成自主熱控制、自主能源控制、自主姿態測量與確定、自主姿態機動、自主軌道保持,為探測器上的單機營造合適的溫度環境,為科學載荷工作提供必要的支撐。針對特定任務及故障預案的自主管理,自主實現既定的科學探測任務,完成科學數據獲取、預處理與存儲,確保科學探測數據的連續性,在器地鏈路恢復時將日凌期間的探測數據回傳地球,最大限度地確保科學探測成果的完整性。
通過研制高度集成的小型化綜合電子系統,實現器務管理、遙測遙控、熱控管理、配電管理、推進控制、機構驅動、數據存儲功能的一體化,為綜合信息自主管理奠定了硬件基礎。通過設計多系統多模式器上信息綜合處理方法,保證一級故障任務正常執行,二級故障整器安全。通過關鍵技術攻關,可實現環繞器在軌無人監控狀態下自主運行大于30 天的能力。
3.2.5 深空高速測控數傳一體技術
深空探測器與地球取得聯系的唯一手段是無線通信技術。由于深空探測的距離遙遠等特點,使得通信信號強度損耗大,接收信噪比低,通信時延巨大,數據傳輸速率受限,加上通信終端相對速度大,多普勒及其變化率大,導致信號捕獲和跟蹤難度大。目前,國外深空探測器普遍采用測控數傳一體設計方案以減少設計的重量、功耗以及簡化地面接收設備等。火星環繞器配備了多副天線,通過天線多波束賦形技術實現不同距離與地球的可靠通信。為了實現高速測控數傳,環繞器攻克了低信噪比載波捕獲、多碼率遙控上行自適應接收、單天線多波束范圍賦形等技術,測控數傳分系統具備極低信噪比信號捕獲接收、多碼率遙控上行自適應接收、高精度定軌等能力。
攻關研制了測控數傳一體化的數字化深空應答機,實現上行載波跟蹤靈敏度指標。通過窄帶濾波、多通道快速傅里葉變換(Fast Fourier Transform,FFT)并行計算等方法,實現多檔碼率自適應接收,接收機動態范圍大于90 dB,滿足大范圍空間衰減變化和姿態、天線指向多變的需求。實現測控天線收發一體化,同一副天線實現雙波束賦形,近地弧段寬波束全向覆蓋,降低了對姿態的要求;遠地弧段窄波束配合姿態指向,滿足應急通信需求。
3.2.6 多碼率自適應中繼通信技術
環繞器器間通信分系統采用UHF 頻段和X 頻段雙通道進行中繼通信,與著陸巡視器配合完成著陸巡視器遙控指令的前向傳輸和科學數據及遙測數據的返向傳輸。
器間通信分系統擔負著火星探測器兩器(環繞器和著陸巡視器)間信息通信,關系到著陸巡視器探測任務的成敗;根據火星中繼通信實際情況,在面臨新環境——火星環境的情況下,對環繞器器間通信分系統提出了高動態范圍、高靈敏度、高多普勒測量精度、輕量化小型化設計等高要求,實現UHF 多普勒測量精度要求,具備高效率載波捕獲與同步跟蹤能力。
4 發展與展望
4.1 技術路線
深空探測能力是一個國家綜合實力的體現,繼我國首次自主火星探測之后,還將實施小行星探測、火星取樣返回、木星系及行星際穿越探測任務,環繞探測技術將在深空通信、高精度自主導航、智能化自主管理與高效能動力4 個方面進一步提升,為后續深空探測器的研制奠定基礎。具體技術路線如圖8 所示。
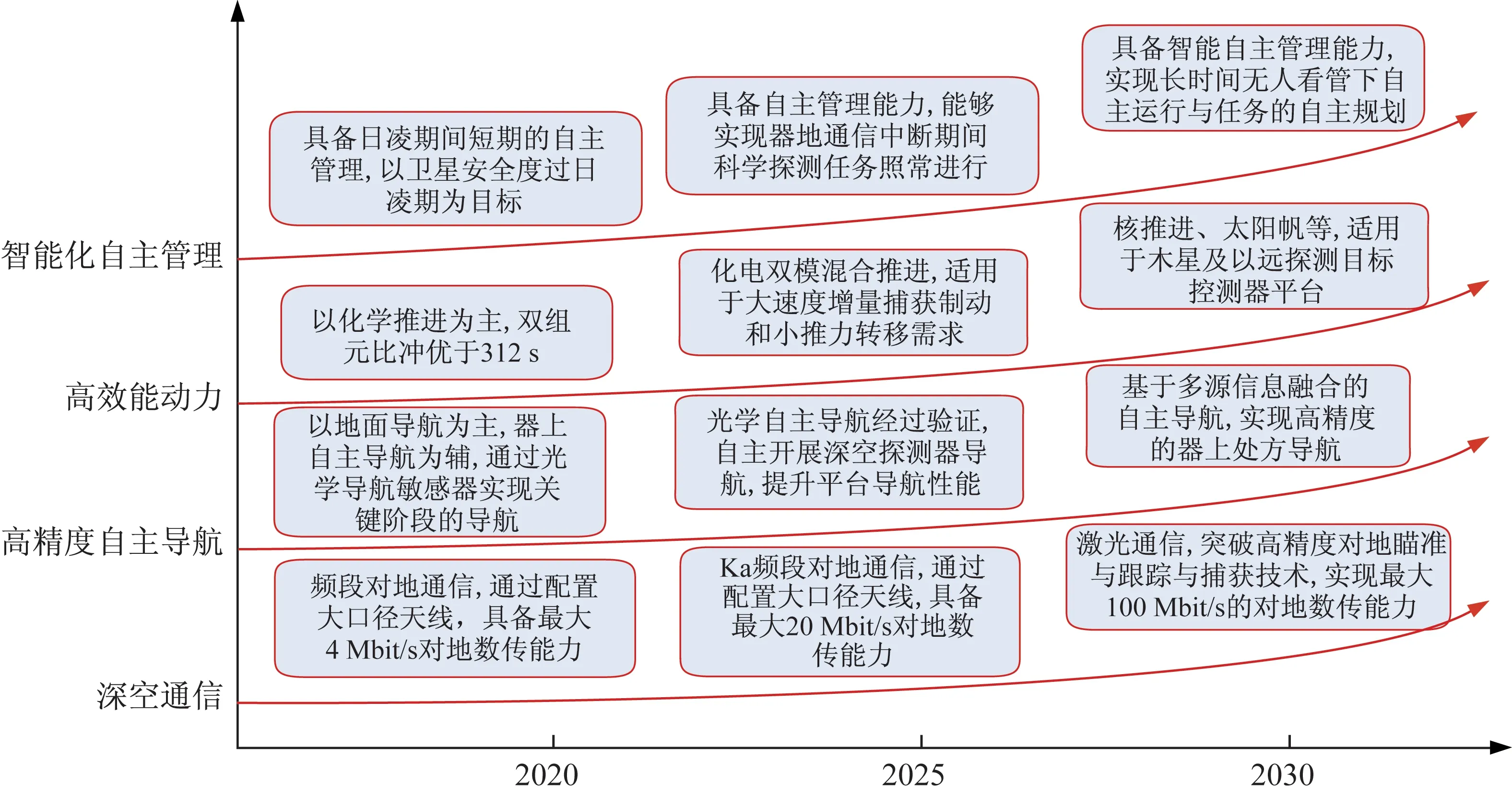
圖8 技術發展路線圖Fig.8 Technology development roadmap
4.2 深空通用環繞平臺
我國首次自主火星探測,在研制過程中突破了多項關鍵技術,其中大部分是深空探測任務的共性問題,如遠距離通信、自主管理、自主導航、制動捕獲等。我們充分利用已有的技術基礎,立足于現有的火星環繞平臺,提出深空通用環繞平臺構想,為我國后續深空探測發展奠定基礎。
4.2.1 平臺模塊化
以火星環繞器研制過程中突破的核心關鍵技術為支點,采用模塊化思想,形成深空通用環繞平臺模塊庫,如圖9 所示。在充分繼承已有技術的基礎上,模塊庫還可以根據后續任務規劃以及技術發展等動態進行模塊增容以及已有模塊的更新升級,具備針對未來探測任務,通過庫內模塊的選配組合從而快速實現任務需求的能力。
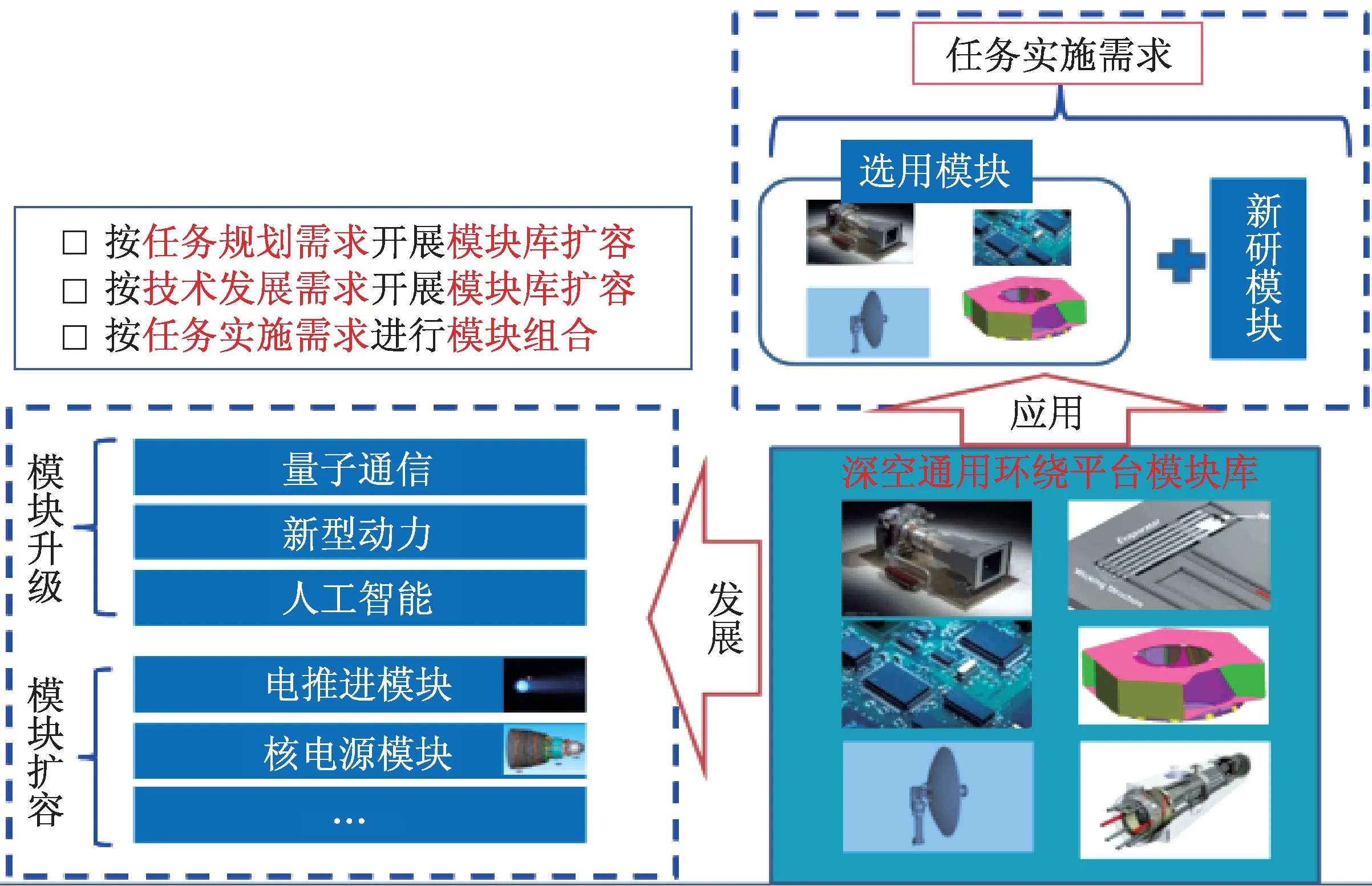
圖9 深空通用環繞平臺模塊庫示意圖Fig.9 Schematic diagram of general orbiter platform module for deep space
4.2.2 系列化平臺應用
以首次自主火星探測任務為契機,大力發展深空探測通用環繞器平臺,可應用于火星取樣返回任務、金星環繞與漂浮探測任務、小行星伴飛附著及取樣返回任務、木星及其衛星探測任務和太陽極軌探測任務等多個任務的系列化環繞器。面向后續深空探測任務,采用通用環繞平臺的探測器構型設想如圖10~圖12 所示。
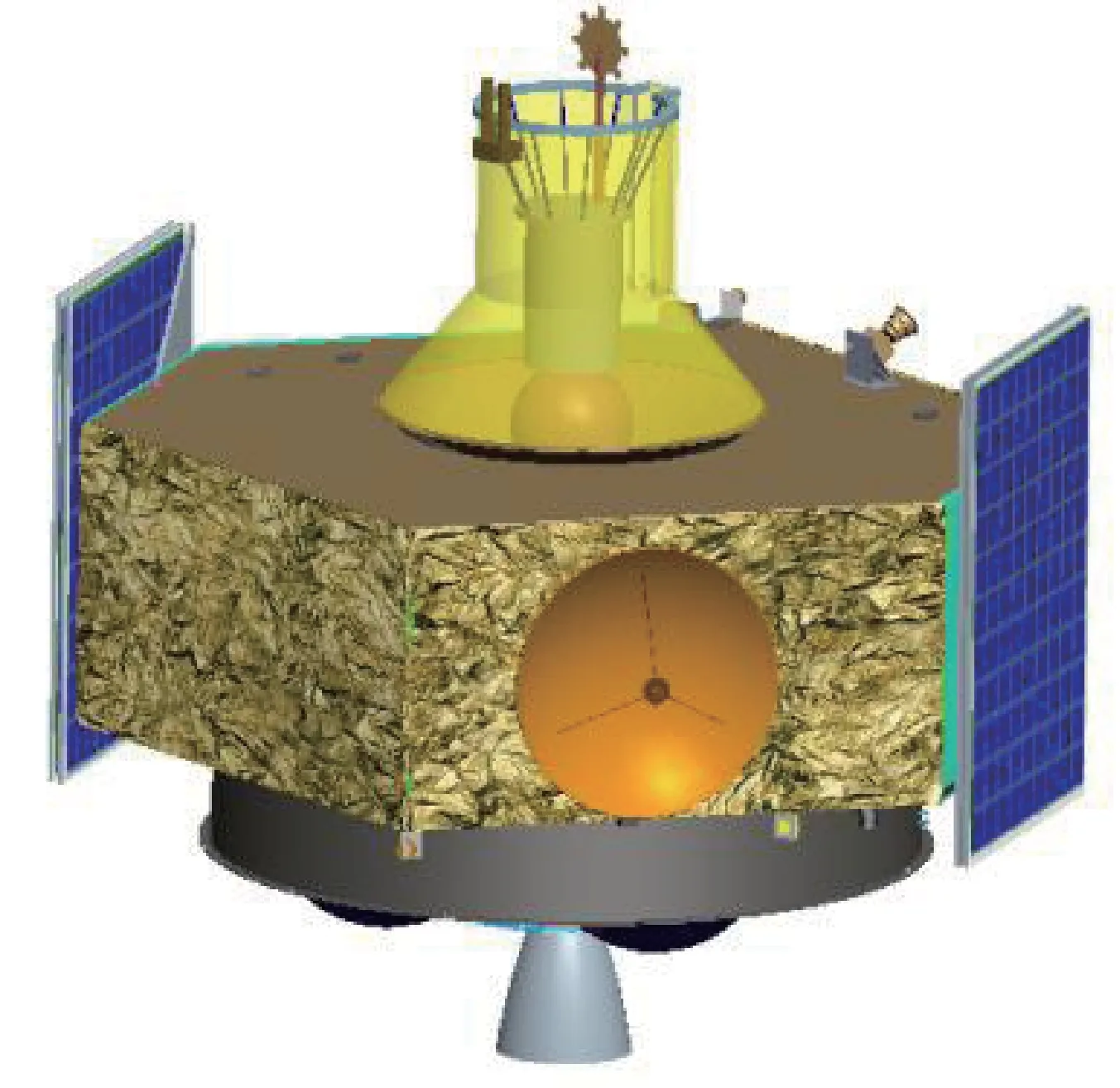
圖10 火星取樣返回環繞器示意圖Fig.10 Schematic diagram of Mars sampling return orbiter

圖11 金星探測器示意圖Fig.11 Schematic diagram of Venus probe
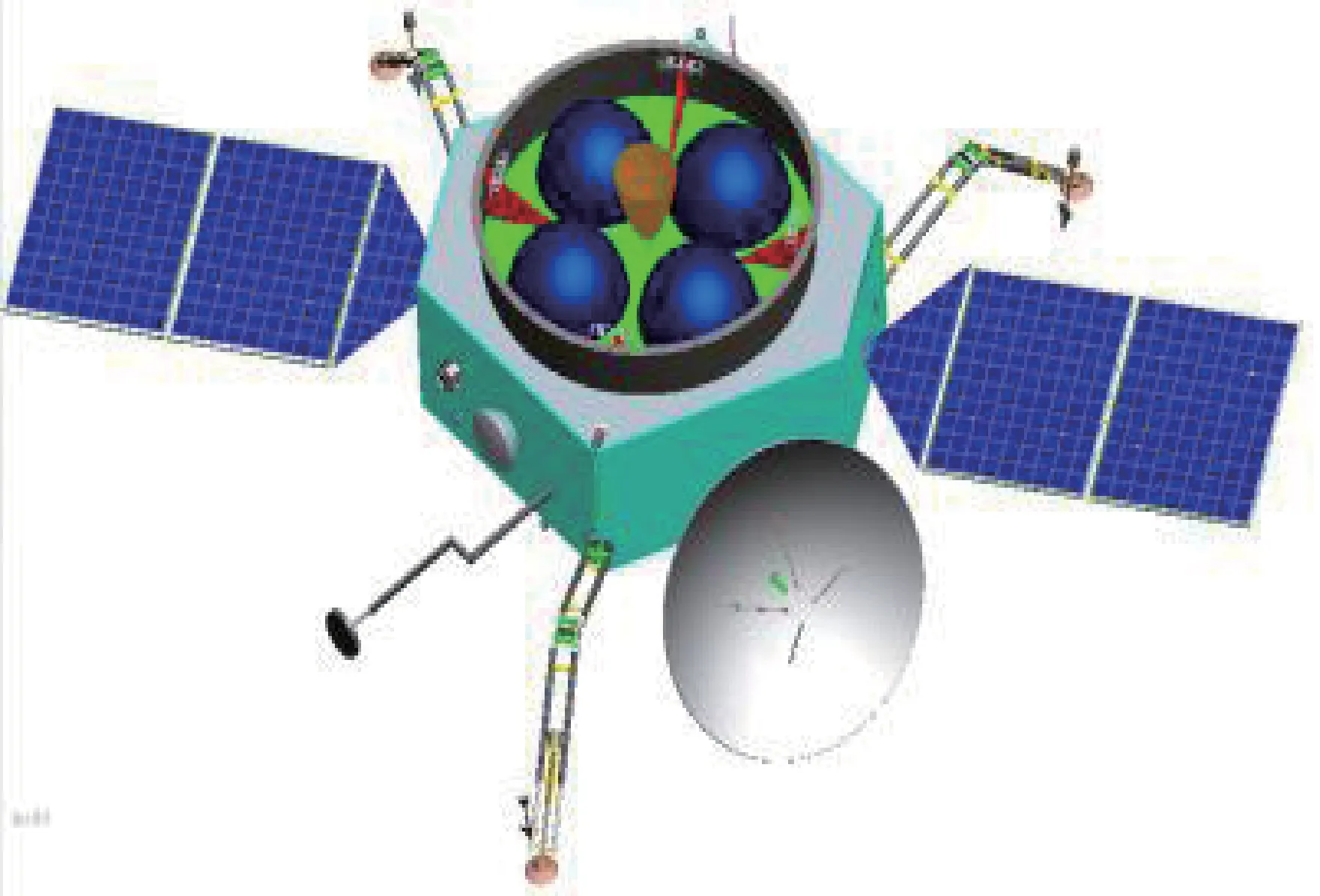
圖12 小行星探測器示意圖Fig.12 Schematic diagram of asteroid probe
5 結束語
火星探測器的成功發射,標志著我國行星探測工程全面拉開序幕,該任務將在世界上首次探索火星就一舉實現“繞、著、巡”3 個目標,使我國深空探測能力和水平進入世界航天第一梯隊,實現在深空探測領域的技術跨越。環繞器研制過程中攻關的大承載輕量化復雜構型、火星捕獲與器器分離自主控制、火星光學自主導航、長期在軌自主管理、深空遠距離測控通信等關鍵技術,將大大推動我國深空探測活動的持續發展。
