裝配式建筑施工塔機通信系統及設計研究
2020-11-23 08:31:34余浩浩吳玉厚石懷濤
建筑機械化 2020年10期
余浩浩,吳玉厚,石懷濤
(沈陽建筑大學 機械工程學院,遼寧 沈陽 110168)
現階段我國工業化建筑發展十分迅速,國務院提出“力爭10年時間左右,使裝配式建筑占新建建筑的比例達到30%”。與傳統建筑相比,建筑工業化通過標準化設計、預配件工廠化生產、機械化施工,不僅大大縮短了工期,而且極大程度地減少了施工人數,提高了勞動生產率,降低了勞動力成本。但目前在工業化建筑施工中,仍采用傳統施工技術及裝備,這樣存在自動化程度低、勞動強度高、效率低、安全保障困難等問題,難以滿足工業化建筑施工需求,已經成為制約工業化建筑發展的瓶頸之一。
隨著我國大力推廣裝配式混凝土建筑,研發適用于裝配式建筑施工的專用技術及系統,提高施工效率與安全,已成為我國建筑工業化發展的迫切需求。自動化施工中,需要利用傳感設備從施工現場采集構件溫度、變形、受力、設備運行及現場施工狀況等,反映施工中各種施工生產要素及其狀態的有用信息的數據。穩定高效的通信系統將施工所需數據準確及時地采集和傳遞,從而為項目決策和控制提供基礎數據,以利于自動化施工和管理。
自動化施工過程涉及很多傳感器數據通信環節,傳統建筑施工通信系統主要通過有線方式,原理相對簡單,技術比較成熟,但每個動作都需要有線電路和設備可靠連接。有線通信系統很多的電氣輔助元件及引線增加了建設維護成本,相比較于無線通信系統,在功耗、功能等方面有很大的發展局限性。
在實際工程應用中,無線通信方式有Bluetooth、WiFi、Zigbee、NFC、LoRa技術等。采取3G/4G移動通信網絡或者ZigBee網絡通信技術,這種方式的通信系統中節點擴展不靈活、遠距離傳輸干擾大等問題,在檢測傳感器數量大的時候成本也很高。根據實際需要及各個無線通信技術功耗與傳輸距離對比(如圖1),通過工況環境的實地考察,針對以上情況,結合LoRa網絡的遠距離、低功耗、高性能,支持大規模組網特性,研究確立了使用LoRa系統作為現場數據傳輸的無線鏈路。
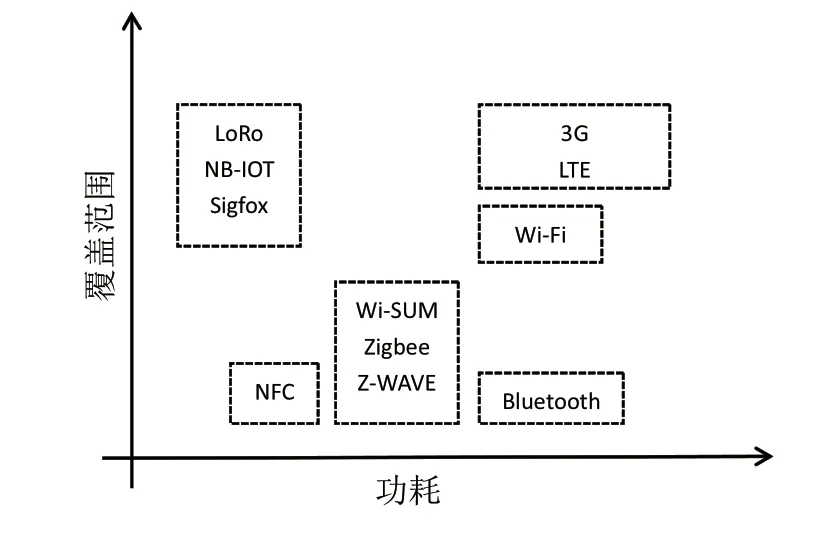
圖1 各個無線通信技術功耗與傳輸距離對比
1 基于LoRa技術通信系統
基于LoRa的組網通信系統由數據終端、通信基站、集成通信模塊的用戶設備、具備通信功能的用戶設備等組成,系統采用LoRa通信協議進行組網通信,實現命令或參數的下達,以及數據的采集與上傳等功能。
本文設計一套基于LoRa的無線通信試驗系統,模擬實現塔機施工過程中的通信功能,硬件搭建主要設備由主從LoRa、三菱FX3u型PLC、MCGS組態屏、電氣線路、接線端子、VGA快轉接頭等組成。測試了通信系統數據丟包率、實現了塔機施工中各環節通信過無線收發、實時有效顯示。
2 基于LoRa通信系統設計
以塔機施工環節為例,設計一套主從LoRa無線通信實驗系統,塔機施工過程主要包括吊鉤垂直方向的起升動作、水平方向的變幅和回轉動作。上電工作時由位移傳感器檢測吊鉤動作時的位置信息,塔機建筑施工基本構成環節及通信信息流程。首先是塔機從安全位置到物料現場區域調取物料,然后執行中間動作環節將物料吊送至施工現場區域卸載物料,最后一步塔機的吊鉤提升到安全距離內準備下次的吊送施工過程。每個環節不同動作的操控,都涉及信息傳輸,選擇LoRa設備搭建主從通信系統,以實現實時傳輸和信息的監看。
2.1 通信架構
本文設計的通信系統,由一套LoRa設備建立無線鏈路傳輸,首先設定通信系統的主從機和信道及目標地址,工控機作為上位機存儲監控塔機工作狀態。塔機的動作指令由PLC有線傳輸給LoRa從機,再經無線通信實現塔機的施工動作控制,系統組態MCGS關聯施工變量和實時顯示通信協議內容,無線架構如圖2所示。
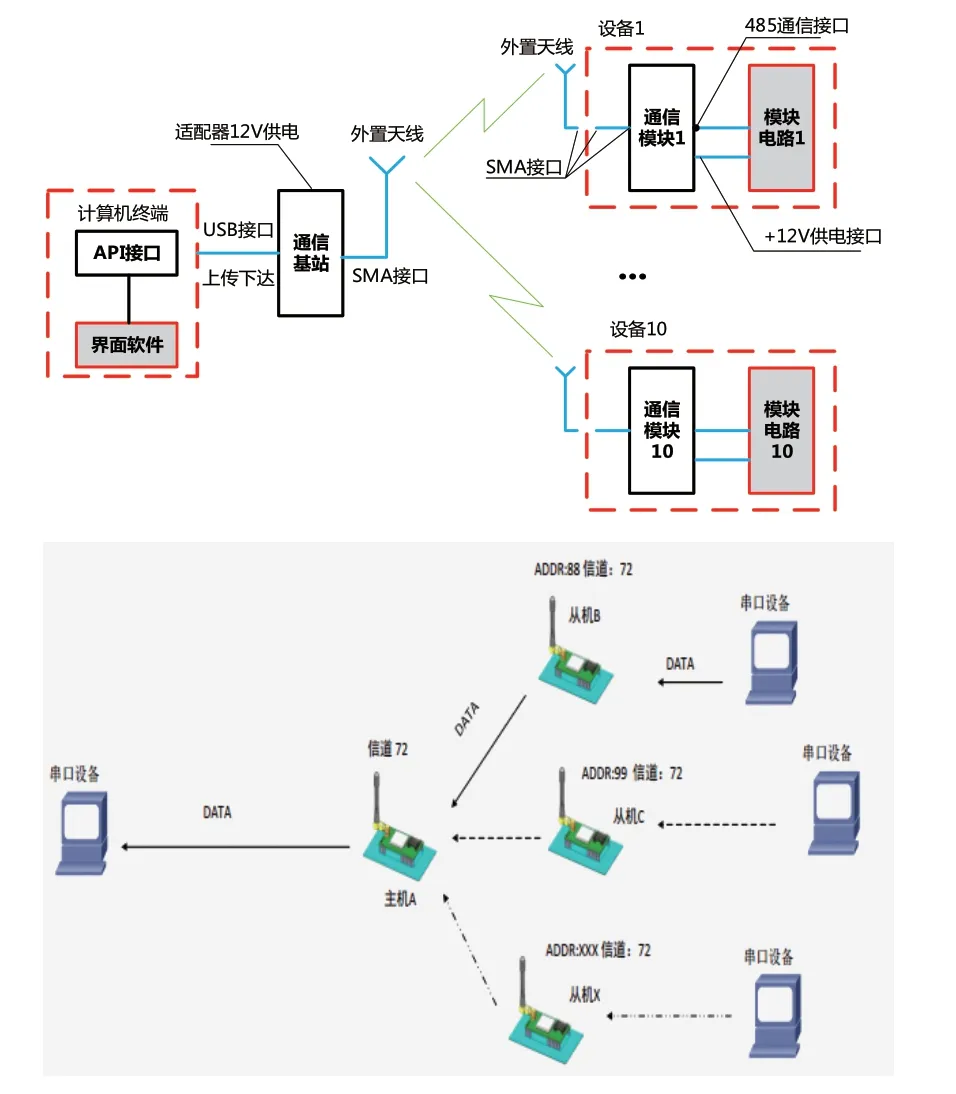
圖2 LoRa無線系統的“無線架構”
LoRa無線系統的“無線架構”,采用的是星型網絡,檢查硬件線路連接正確后,給PLC設備和LoRa模塊設備上電,下載主機和從機程序,調試實現了主機與多從機間的數據收發無線通信。
2.2 實驗通信協議編制
本系統由無線LoRa和有線485進行組網通信,均采用MODBUS通信協議RTU通信方式。可進行點對點通信和點(基站)對多(模塊)通信。塔機進行機械施工的過程中,塔機駕駛室工控機和地面遠程無線通信,設計握手通信協議。如表1。
2.3 系統組成及功能
搭建測試平臺進行鏈路通信實驗,實驗板面上,三檔開關實現點動和常動控制的切換,左側檔位常動模式,右側檔位點動模式,中間檔位無效。搖桿前/后動作,實現變幅電機正/反轉控制;左/右動作,實現起升電機的正/反轉控制。如圖3。

表1 實驗系統通信協議
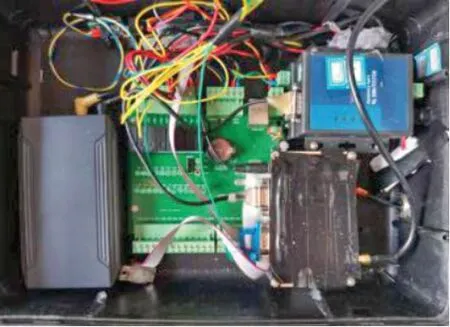
圖3 搭建LoRa無線系統實物圖
觸摸屏MCGS組態界面,主要功能有:顯示收發遙控數據,遙控器權限及選控電機指示,GPS定位信號指示及收發數據顯示和按鍵透傳,以太網相關參數讀寫。
2.4 MCGS組態設計
監控界面通過組態軟件設計(如圖4),系統添加輸入輸出設備模塊及變量,可以實時顯示收發數據和通過指示燈判定塔機動作的情況。組態界面有2個數據顯示區,5個指示燈、1個模式選擇區、12個關聯按鍵。具體功能如下。
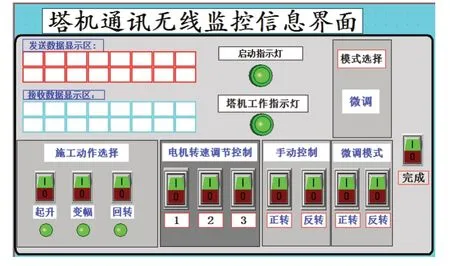
圖4 實驗系統MCGS組態設計
1)發送數據顯示區 通信過程中,由從機LoRa發送給主機設備的協議數據信息。
2)接收數據顯示區 通信過程中,由主機LoRa發送給從機設備接收的協議信息。
3)動作選擇 根據現場工況,機械施工起升、變幅、回轉動作的選擇和狀態指示,出現異常指示燈閃爍警告。
4)電機轉速控制 搭建的模擬測試系統,對電機工作設定為3個操控檔位進行測試,通過協議完成檔位選擇確認。
5)手動控制 塔機操控模式可以變換,直接由外接搖桿手動進行塔機動作。
6)模式選擇 組態顯示設計的3種操控模式,包括檔位控制模式、手動控制模式、微調模式。
7)微調模式 設定一種就位微調電機轉速,模擬實現就位時的微調動作。
8)啟動指示燈 系統上電自檢,指示系統狀態情況,不正常及時檢查維護。
9)塔機工作指示燈 在操作施工環節,顯示工作狀態是否正常。
10)完成按鍵 系統檢測到吊鉤復位到安全距離內,塔機施工完成后,關閉系統。
3 實驗測試
在實驗樓和室外塔機模型進行了多次實驗檢測,通過操控主機實現塔機的控制作用,將物料從指定取料位置吊運到指定施工位置,包括塔機的起升動作、變幅動作、回轉動作的調控,遠程通信效果良好、界面隨動跟隨流暢,平均數據丟包率0.05%,滿足工程設定標準。如圖5。
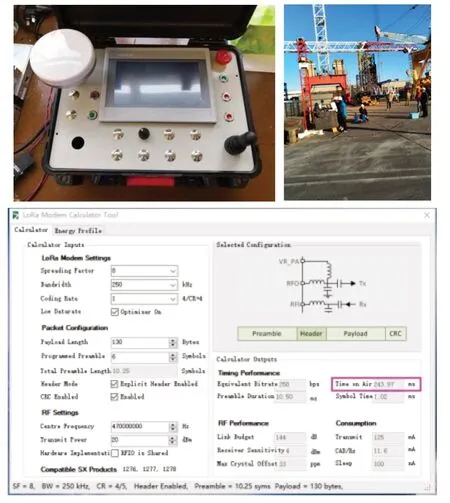
圖5 實驗測試圖
為確保無線通信系統的可靠性,對無線通信系統進行多項測試,軟件界面如圖6,測試內容及結果如下。
3.1 測試1
測試調節LoRa無線通信系統主機與從機之間接收發送數據信息,測試結果表明任意數據在傳輸過程無丟失。

表2 測試2數據記錄表
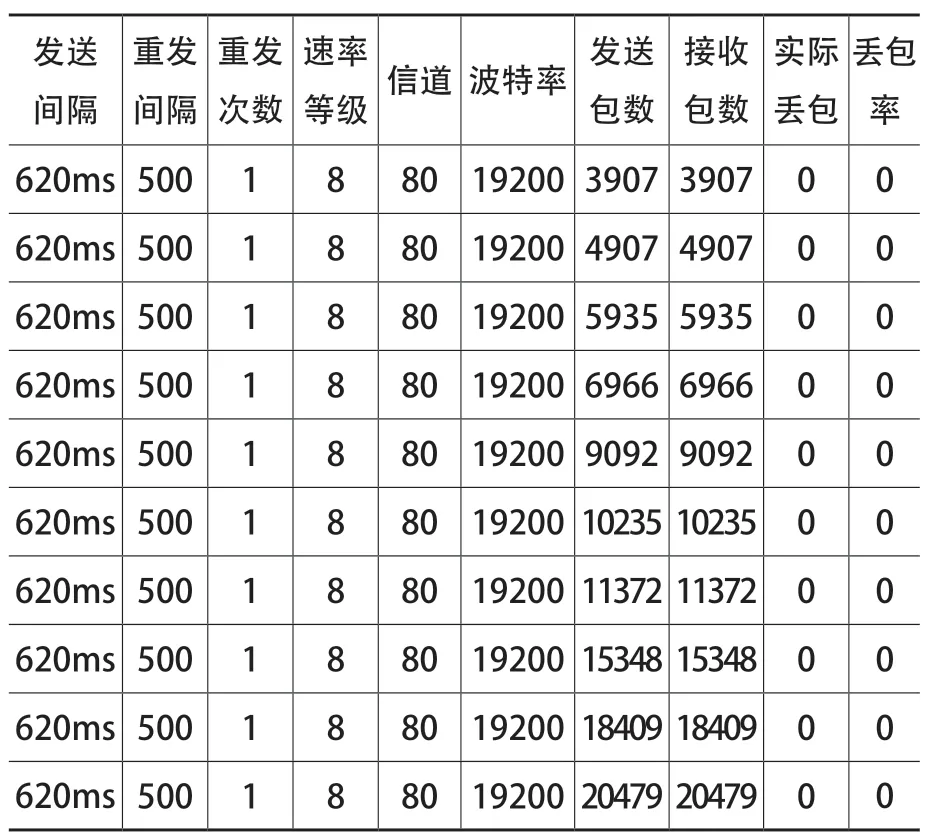
表3 測試3數據記錄表
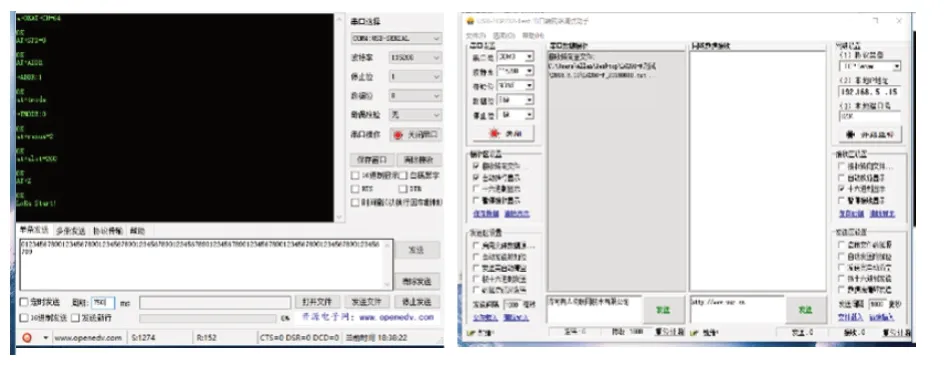
圖6 發送(左)及接收(右)使用軟件截圖
3.2 測試2
電腦通過串口助手由LoRa1給LoRa2發送數據,通過電腦串口助手顯示接收數據。每包126字節進行測試,多次測算丟包率情況丟包率在0.0285%以下。測試記錄如表2。
3.3 測試3
測試結果表明LoRa無線通信系統主機與從機之前多組數據同時發送,丟包率為0,好于工業標準0.05%以下,測試記錄如表3。
3.4 測試4
對LoRa無線通信系統進行了隔墻性能的測試,在有多重墻體的復雜室內環境下大約40m范圍內,穿越9層實驗樓墻體,可以實現穩定的主、從機數據無線通信。本測試均在信道72,每包126字節進行測試,丟包率萬分之五以內,符合工程要求。測試場所:從實驗樓隔教室進行穿透墻層實驗。主要測試參數設置及測試結果如表4。
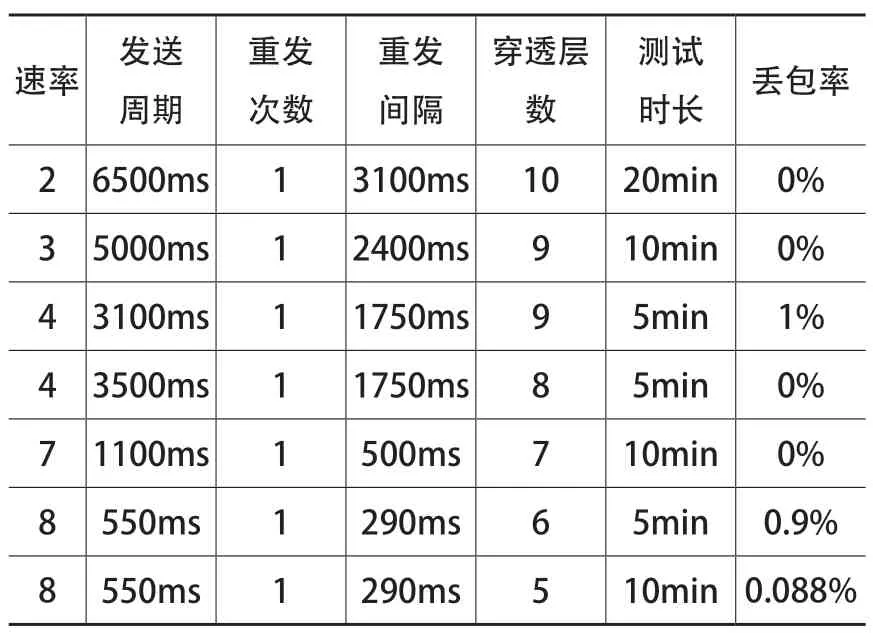
表4 測試4數據記錄表
3.5 測試5
進行數據傳輸測試,電腦通過串口助手由LoRa1給LoRa2發送數據,通過電腦串口助手顯示接收數據;電腦通過串口助手向PLC循環發送2個字節的數據,采取有線通信,無LoRa接入;電腦通過串口助手接從機LoRa向PLC主機LoRa發送數據,通過PLC顯示接收數據。測試表明PLC和串口助手間,232通信和485通信實時有線通信測試,數據丟包率極小。PLC無線485通信準確及時,采用無線LoRa系統485通信數據傳輸,丟包率在萬分之五以下,符合工程要求。
調試完成兩套不同通信信道的LoRa無線系統,通信信道和波特率分別采用72、115200,82、19200。測試結果表明LoRa無線系統在波特率為19200,發送間隔為500ms的情況下丟包率最少。
3.6 測試6
LoRa置于密閉金屬殼體內部穿透通信測試,測試結果表明將LoRa置于密閉金屬殼體內部通信仍然可以實現穩定的主、從機數據無線通信,符合工程要求。
說明:重發間隔需大于發送所需時間加接收節點回復ack時間,即slot>=243.97ms(單次發送所需時間8)+10ms(接收方回復ack時間估計值)。發送頻率>243.97(單次發送所需時間)+260ms×2(保證有兩次重發時間)=763.97ms。
4 結語
本文研究了基于LoRa的裝配式建筑施工通信過程,并搭建了一套基于LoRa的裝配式建筑施工通信測試系統,在實驗樓內和室外塔機模型完成重復性通信效果測試。
1)對大功率LoRa無線通信系統進行了隔墻性能的測試,在有多重墻體的復雜室內環境下大約100m范圍內,穿越16層實驗樓墻體,可以實現穩定的主、從機數據無線通信,符合工程要求。
2)實驗測試分析可知通信過程中,數據丟包率符合工程需求且安全可靠,滿足工程通信系統的安全性與穩定性。
3)通過實際的現場試點應用驗證表明,本文中研究并設計的技術應用方案,試驗效果良好,可以有效提高設備在線率并降低現場維護設備頻次,提高工作效率,具有非常好的推廣前景。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
建材發展導向(2021年9期)2021-07-16 07:11:36
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
小學生作文(低年級適用)(2018年3期)2018-04-17 00:58:35
家庭影院技術(2017年9期)2017-09-26 03:41:45
少年博覽·小學低年級(2017年4期)2017-06-09 16:22:28
作文評點報·低幼版(2017年7期)2017-03-11 20:49:41
中國房地產業(2016年2期)2016-03-01 01:25:48
河南電力(2016年5期)2016-02-06 02:11:34
