隨行軌道裝置
2020-11-16 01:53:34梁文森
中國新技術新產品 2020年16期
關鍵詞:電梯
梁文森

摘 ?要:這是一個智能驅動應用的實驗介紹。隨行軌道裝置是行走于樓道上空的智能動力裝置。它可以作為一種輔助人上樓下樓的輔助工具,可望作成“手提電梯” 進入我們的日常生活。該裝置利用陀螺儀和加速度計在重力場中作為姿態傳感器,通過微型計算機、開關電路和輪穀電機的驅動,從而實現軌道裝置沿軌道對運動傳感介面的跟蹤。運動傳感介面就是人與機器互動的連結點,連結點分擔人的體重,同時傳達人的移動信息,如駐步、慢行、快行。這樣,人就可以在較清的體重狀態下輕步上樓,又在減輕體重的狀態下平穩下樓。在這個過程中,人仍然是每步行動的主體,有能力步行的人就可以使用。
關健詞:隨行軌道裝置;樓道交通;姿態控制;運動介面;人工智能
中圖分類號:TM384 ? 文獻標志碼:A
0 引言
隨行軌道裝置是一款可沿軌道跟隨人的動向即時移動的動力裝置 。下面首先介紹隨行軌道裝置的機械結構。
1 輪轂電機
圖1是輪轂電機,電機輪轂擱在道軌3的軌頭上方。 A表示輪轂電機的心軸,在心軸A的一端懸掛擺桿5,擺桿標示為A-B。擺桿下端 B在軌道的垂直投影面內可繞懸掛端A小幅擺動。擺桿內安裝著控制器和動力電池組。控制器是由姿態傳感器、微型計算機和執行電路組成的。心軸A固定于隨行軌道裝置的機架上部,同一側面機架下部固定著兩根同向平衡的導向輪軸,上面各安裝導向輪4。這樣,3根軸連為一體,構成隨行軌道裝置的機架2。擺桿上端點 B是吊掛重物的連結點,又是移動信號的接受點。B點上可以掛結使用者選用的各種輔助工具,例如攀扶用的手環、把柄和腋下托把等。輪轂電機的輪轂是隨行軌道裝置的驅動輪,起支承和驅動作用。輪轂外層包裹橡膠或聚酯材料制造的槽型輪胎面。輪子表面與道軌表面的計算的摩擦角需要大于45°,這樣,即使軌道在35°斜度運行時,也不會打滑。驅動輪支承隨行軌道裝置的自重和通過掛結點B傳遞人體重量并提供移動的驅動力或穩定的剎車狀態,驅動輪只受控制器的控制。
道軌呈工字形,軌頭橫截面為圓形;軌底橫面也是圓形。軌腰中部一面有翹板,用來連接支架以支撐道軌懸空敷設。軌道跟隨樓梯走向,在縱向和橫向轉折段需要有足夠的彎曲半徑,保證使3個槽輪通過彎道時輪子與道軌有適當的間隙,使隨行軌道裝置平穩運行。道軌通過固定支架懸于樓道上方距離步級約2.4 m高度敷設。2個導向輪可以防止隨行軌道裝置向側面傾斜,并在移動過程中起導向作用,同時承擔驅動過程機架的反向扭矩。擺桿是一柄管子,里面安放控制器和動力電池組。 擺桿下端有能與攀扶工具掛結的裝置。擺桿在自由狀態下是向地面下垂的,此時AB連線與重力線重合。
2 隨行軌道裝置的使用
前述擺桿內裝置陀螺儀和加速度計組成的慣性測量單元,可以檢測擺桿擺動方向、擺動角度和加速度,并以此作為跟隨移動的解算依據。在開機狀態下設定慣性陀螺儀慣性軸線與重力方向一致的情況作為電機的剎車狀態,即使用者攀扶著站立不動的狀態:一旦使用者起步移動,掛結點 B被觸動偏移時,偏移的運動信息經計算機處理并由開關電路控制電機作相應的旋轉,隨行裝置追蹤移動以維持陀螺儀軸線與重力方向一至,直觀上擺桿A 點即時對 B點保持跟蹤。使用者通過掛結點 B將部份身體重量傳給了隨行軌道裝置,從而減輕腳步承擔的重量。隨行軌道裝置跟隨使用者上樓或下樓,不管坡度如何變化、行走速變化都能即時跟隨。隨行軌道裝置可以沿軌道的2個方向移動即可以協助上樓或下樓。隨行軌道裝置能在0.1 s時間內對擺桿在1°角之內的擺動進行跟蹤,這樣的響應速度和靈敏度在實驗過程中感覺配合是流暢的。
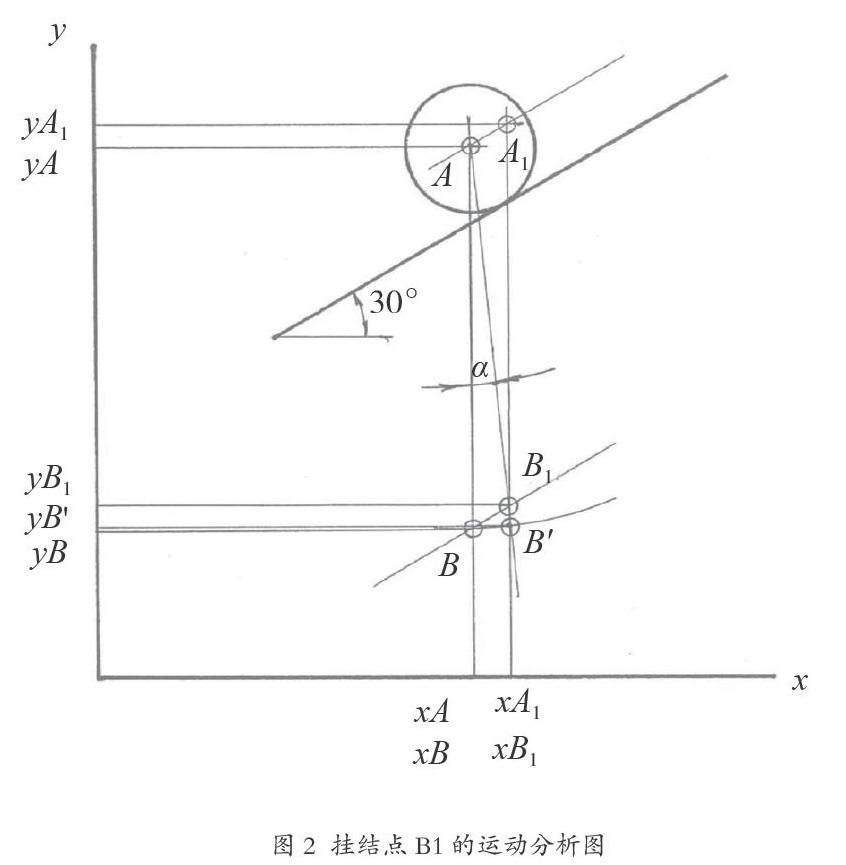
試驗中的第一感受是:上樓時感受到被牽著上行的輕快,而下樓時感覺被扶著一級一級平穩往下放。上樓時,隨行軌道裝置接受人的移動信息,只是B點被觸動往前偏移,隨行軌道裝置即沿傾斜軌道往上移,人在往前移時被往上牽。這個過程可以作圖來理解,如圖2所示,X-Y是軌道投影面上水平坐標和垂直坐標,驅動輪在斜度為30°的軌道向上移動,即人使用隨行軌道裝置上樓時,B點受觸動向前擺一角度α,當傳感器擺動角度靈敏度在1°以內。α為0°~1°。起始時的狀態是A-B在沿垂狀態,這時,A點和B點的X坐標XA和XB是一致的,當B點相對于A點擺動α角至B'位置,隨行裝置跟隨移動,即A沿30°升角移動到A1,所以B點的移動是B點繞A擺動和隨A點移動的疊加,即圖示B1位置。在A到達A1瞬間,A1和B1的X坐標XA1和XB1是一致的,體現為A點對B點的跟隨。根據B點至B1點Y坐標的變化,就可以知道人被牽往上行的過程。
下樓是另一種感受。在徒步情況下,下樓的難處在于:當提腿邁步下樓時,只有另一條腿著地,這腿關節除了要支持身體重量,還要控制膝關節屈曲速度,使邁出的腳步不至于沖擊落地,這對于中老年人來說特別難受。而在使用隨行軌道裝置的情況下,除了減輕體重,一步一步的下落速度是由使用者自身向前移動的速度控制的。 試驗時的感覺只是人被攙扶著一級一級平穩地被往下放。應用隨行軌道裝置時選擇適合自己的掛結方式才會有更好的效果,這涉及各人的體能和喜好。最簡單的是直接把持隨行軌道裝置的擺桿,因為擺桿本身就是一根管棒,表面涂上強吸附涂層,也可以掛結一雙手環,如果需要減重更多,可以掛結一雙托把,將其夾在腋下使用。另外,隨身行李和菜籃子可以吊掛在由A軸引出的重物掛鉤下面(圖1未有顯示)。隨行軌道裝置用在不同功能需要時可有不同的使用模式,但是無論任何模式,道軌都作為建筑物樓道的一種配置供居住者共同使用。在具體應用時,可以有2類使用模式。1)隨行軌裝置常設在樓梯間的道軌上作為公共使用設施。在這種情況下,需要配套相應的調度系統和充電設施;需要相應的日常公共管理和維護措施。2)隨行軌道裝置作為私人用具由使用者自備。上樓或下樓時只要將隨行軌道裝置扣到道軌上隨掛隨用,用畢自行取下、自行保管。作為個人用具的使用模式顯然省去各種配套設備和公共管理、更靈活和更易形成生態。隨行軌道裝置的驅動過程是間歇負荷,間斷使用,而且每次使用時間不長。因此,可以用更高的質能參數進行設計,使裝置結構緊湊,重量輕,運用起來方便穩妥。裝置向軌道掛扣穩定可靠、解扣取出容易操作等都是基本要求。通過減重隨行的方法解決多層住宅上樓下樓的問題,采用隨行軌道裝置有實在的使用功能、又有明確的應用人群,還有4個方面的優點。1)設備簡單輕便、容易使用,只要具有正常行動能力的人都可以使用。2)軌道僅占用樓道的上空,不妨礙梯間的通道。3)使用者和隨行軌道裝置是通過運動界面發生聯系,沒有“乘搭”,沒有“裝載”,人始終腳踏實地,因此由于誤操作或設備故障引起的受傷機會大大減少。4)與箱式電梯相比較,隨行軌道裝置占用地盤建設電梯井;無須作為特種設備要由有資質的部門進行建設;無須定期檢驗和專業人員監控維護而且費用高昂。5)使用隨行軌道裝置輔助上樓下樓將會引發一種健康的生態。據中、外許多權威專家的總結,要求人們注意30歲以后的”健康節點”,這些節點是指30歲以后膝關節開始磨損;40歲后肌肉群會逐漸減少;50歲后骨質密度會降低:60歲后摔倒的概率明顯增大。所以,建議從30歲開始膝關節要省著點用了。可見,徒手甚至攜重物爬樓梯對于大多數人都會造成傷害。許多中老年人受困于樓上深感出行不便,就是這個原因。隨行軌道裝置的使用過程相當于一次臂膀伸展運動,日常有機會伸張胳膊、攀扶隨行、在減重狀態下上樓下樓對不同年齡的人都一樣有好處。隨行軌道裝置應用在康復中心作為下肢理療、步行訓練,或者安裝在特別的徒坡過道方以便于行人也有其應用場景[1]。
3 開發隨行軌道裝置的展望
未來,樓房建筑越來越高, 電梯技術已經很成熟,還需要權衡其經濟性與可行性。對于已建在用的樓房(據報導全國有250萬道樓道待裝電梯)、尤其不具備空間安裝電梯的民居更難顧及。近年來,開發的分段踏板電梯、座椅電梯以及各式爬梯車等,許多熱心人士都在努力,但是由于種種原因,也不容易推廣。現有可供選擇的方案中大多數都是以可“搭乘”為目標,即對人體全承載。這樣的設備都免不了體積大而占用公共空間。
4 結語
該文所介紹隨行軌道裝置實驗的思路是利用減重隨行方法輔助上樓下樓。今天不斷開發的智能驅動技術應用為這一想法提供實現的可能。在減重隨行的過程中,人仍然是控制行動、保持平衡的主體,自己步伐自己做主,人與機器有一種協調互動的關系,而不會感覺器械纏身以至身不由己。展望隨行軌道裝置作為家用領域智能助力工具、以輕便的個人穿戴設備形式出現可能是進入千家萬戶的可行途徑。無論是剪式樓道或螺旋樓道,只需要在樓道上方設置了輕型道軌,人們都可以隨時使用。未來隨行軌道裝置就像一柄智能電動玩具,在商場可以買到。這時,隨行軌道將是樓道的一種配置,樓梯樓可以建10層或更高,但是樓梯樓不再令人生畏。
參考文獻
[1]杜思瑤. 電梯控制技術[J]. 科教導刊:電子版, 2015(6):174.
猜你喜歡
課堂內外(小學版)(2024年5期)2024-05-29 00:00:00
中國品牌(2019年10期)2019-10-15 05:57:12
故事大王(2018年3期)2018-05-03 09:55:52
小學生學習指導(低年級)(2018年3期)2018-01-31 02:18:58
知識就是力量(2017年9期)2017-10-13 23:35:31
小學生時代·綜合版(2016年7期)2016-05-14 17:53:49
紅蜻蜓·低年級(2015年11期)2015-04-29 00:00:00
小說月刊(2015年11期)2015-04-23 08:47:36
小說月刊(2015年4期)2015-04-18 13:55:18
發明與創新(2015年33期)2015-02-27 10:40:04
