一種低成本高可靠性的SPMSM啟動方法
2020-11-11 07:36:52范立榮黃景鵬
通信電源技術 2020年14期
關鍵詞:系統
范立榮,黃景鵬
(廣東交通職業技術學院 汽車與工程機械學院,廣東 廣州 510650)
0 引 言
PMSM由于沒有轉子繞組,故體積小、重量輕、效率高、慣量小且控制精度高,同時保留了普通直流電動機優良的機械特性[1],使其廣泛應用于各個行業。對永磁同步電機的控制主要為矢量控制,可以準確控制轉矩與轉速。近期有不少電機控制系統采用直接轉矩控制,但在轉矩和磁鏈的控制方面不盡如人意[2],因此選擇采用矢量控制。
PMSM多種控制的最終思想是將電樞與勵磁磁場分隔并解耦,從而使得電機的轉矩分量和勵磁分量可獨立控制[3]。目前,PMSM矢量控制最常見的5種控制方式分別為[4]id=0的控制、轉矩電流比最大控制MTPA、cosφ=1控制、最大輸出功率控制以及弱磁控制。
IPMSM大多采用MTPA結合弱磁的方式進行控制,而SPMSM中由于Ld=Lq存在轉矩公式:

從式(1)可以看出,電磁轉矩和q軸電流及永磁體磁鏈強度有關。永久磁鏈在外施電壓一定時是一個常數,此時控制電流iq可控制Te。這樣的控制比IPMSM采用MTPA結合弱磁的控制方式簡單高效。因此,本文采用id=0的控制方式對SPMSM進行控制并仿真。
1 SPMSM矢量位置觀測器
1.1 位置觀測器狀態矢量方程
永磁同步電機在旋轉參考系(SRF)d-q軸上的電壓方程為:

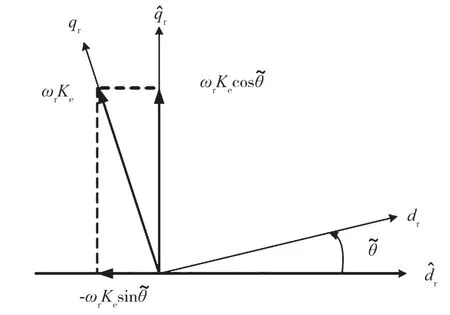
圖1 旋轉坐標系下d-q軸電壓及反電動勢電壓矢量圖
假設實際轉子角度和估算轉子角度之間的誤差足夠小,那么可以忽略實際旋轉坐標系和估算坐標系上d軸電感與q軸電感之間的差異。d-q軸上的電壓方程表示如下:


結合式(1)~式(7),可以得到電子電壓空間狀態矢量方程如下:


由于電機的機械時間常數通常比電氣的時間常數大很多,因此與電機的電流和電壓相比,旋轉頻率和電動機速度的變化較慢。
1.2 狀態矢量方程求解
從式(8)和式(9)可以得出:

由矩陣的特性可知,式(13)矩陣是可觀測性的,且是奇異的。因此,式(8)和式(9)也是線性可觀測的時變系統。可根據輸出變量d軸和q軸電流估算第三和第四狀態變量,或通過估算d軸和q軸的反電動勢電壓估算轉子的轉子角度和角頻率。為了驗證算法的有效性,在MATLAB/Simulink系統搭建無位置速度矢量模型并進行仿真。
2 MATLAB/Simulink模型搭建
系統采用的無位置速度傳感器矢量結構由轉速電流雙閉環系統構成。外環為轉速環,內環分為Id電流環和Iq電流環,分別控制磁場和電磁轉矩。轉子角度θest和ωest的估算可利用系統采樣電機定子電流變換得到的Vα、Vb、Iα以及Iβ。系統采用idref=0的控制方式,采用狀態空間矢量控制進行位置估算,系統整體運行結構如圖2所示。
對應圖2搭建的MATLAB/Simulink仿真模型如圖3所示。
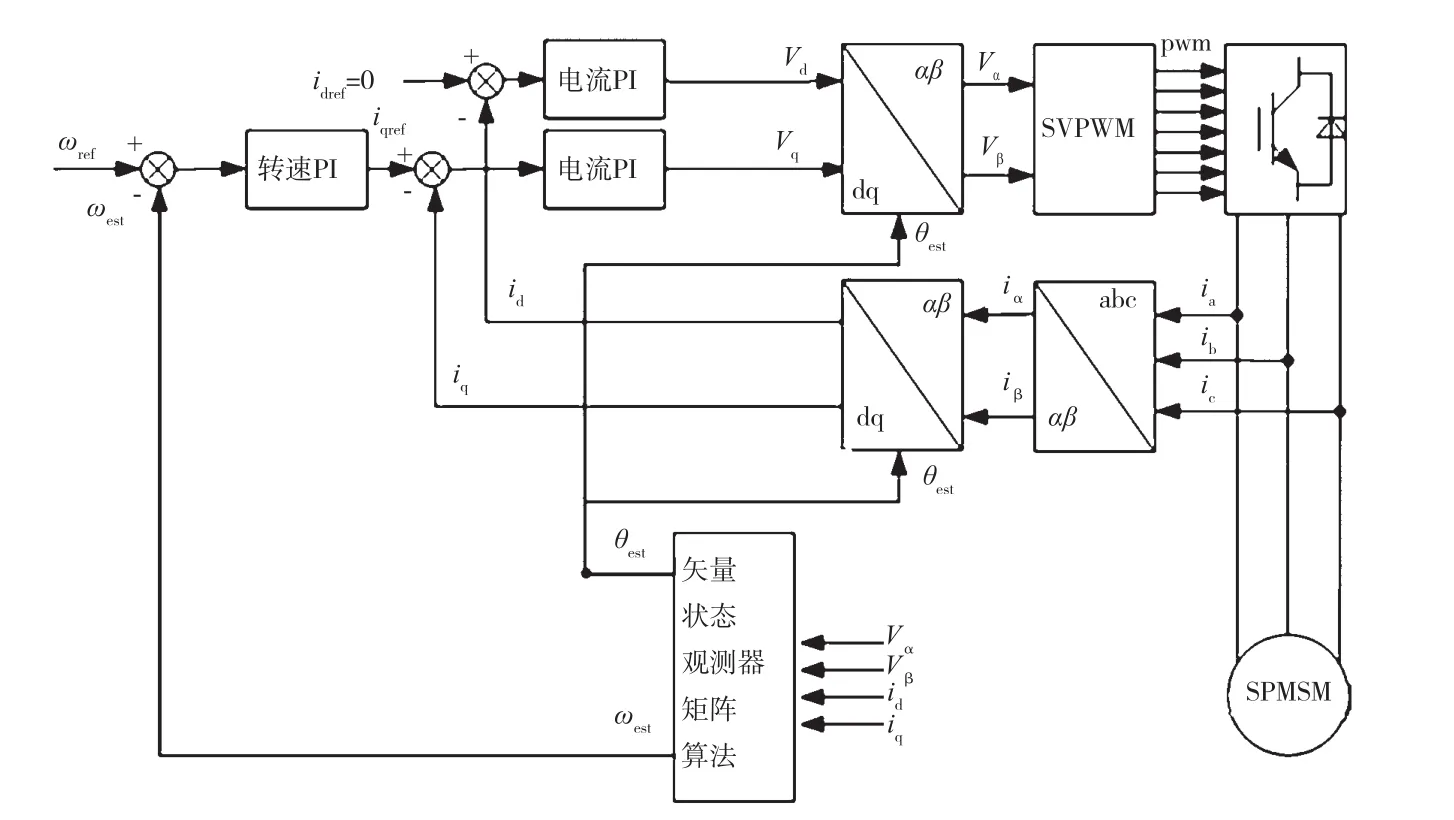
圖2 SPMSM狀態觀測器矢量控制系統框圖
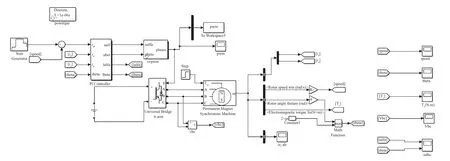
圖3 SPMSM無位置速度傳感器矢量控制仿真系統
主電路由輸入直流DC經過三相逆變后驅動永磁同步電機。電機的額定功率P=1.5 kW,額定電壓V=380 V,極對數為2,定子電阻Rs=0.35 Ω,定子d軸的電感Ld=5.2 mH,定子q軸的電感Lq=11.9 mH,磁鏈ψ=0.113 493 Wb,轉動慣量J=0.004 06 kg·m2。將初始角頻率、轉子角度以及定子電流均設置為0,具體電機參數如表1所示,仿真設置如圖4所示。
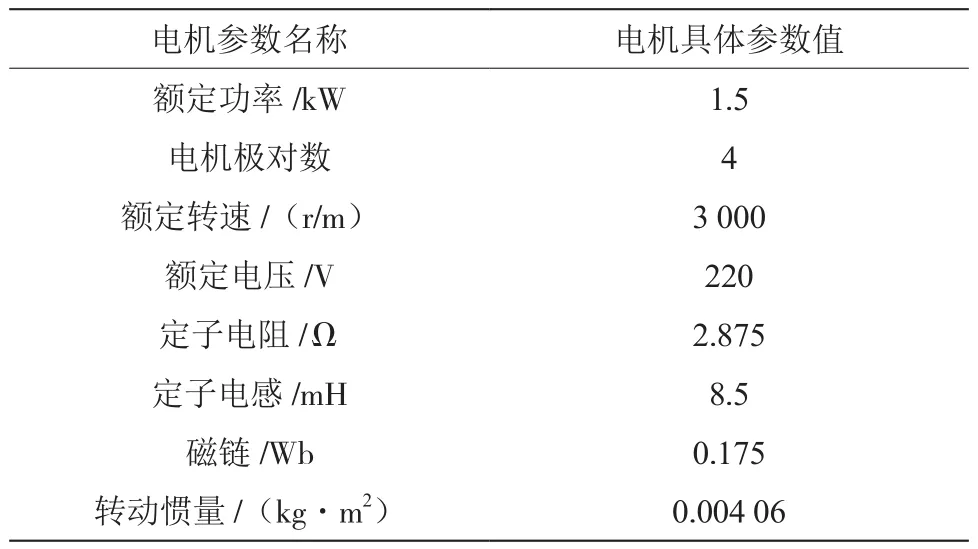
表1 SPMSM電機參數
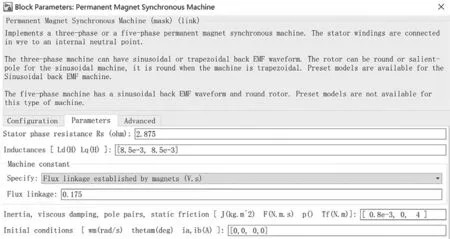
圖4 SPMSM仿真參數設置
系統利用狀態空間矢量估算得到轉速,在設定轉速做差比較后,進行電流PI調節得到轉矩調節器輸出uq。對三相電流經Clark變換和Park變換后得到的Id與idref=0進行比較。電流PI調節器調節得到輸出ud。uq與ud作為電壓調節器的輸入,與估算得到的角度θest,經Park逆變換后得到兩相靜止坐標系下電壓ualfa和ubeta,具體實現框圖如圖5所示。
系統采樣離散仿真時,開關器件開關頻率設為10 kHz,死區時間設為2 μs,具體設置如圖6所示。
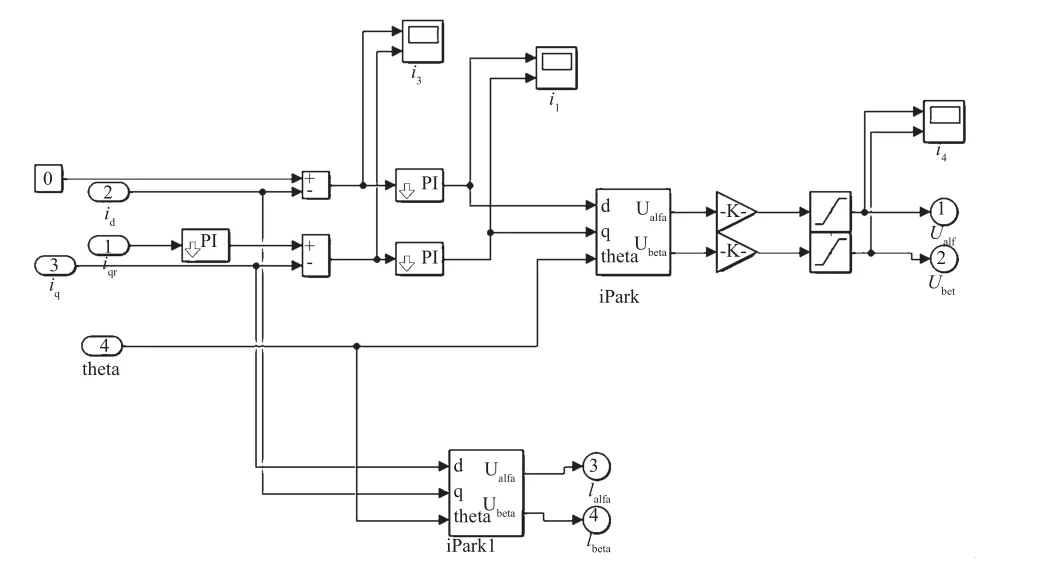
圖5 實現框圖

圖6 矢量控制開關頻率及離散時間設置
3 系統仿真
SVPWM發生模塊是實現矢量控制的關鍵模塊,將來自兩相靜止坐標系下的電壓ualfa和ubeta作為輸入。與三角載波相比較的輸入信號,輸出的調制波與三角載波比較延遲后,得出6路SVPWM波形。SVPWM具體實現框圖如圖7所示[5]。
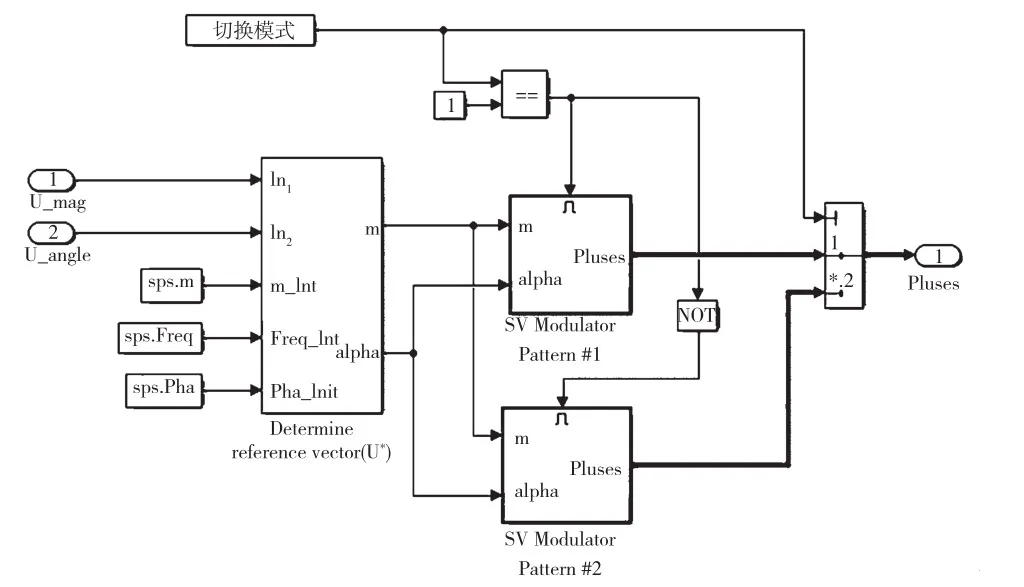
圖7 SVPWM控制關鍵算法模塊
設置完成模塊的上述參數后,設置終止仿真時間為5 s。系統在帶5 N·m滿載下啟動,在0.1 s時突卸載至半載3 N·m。同時,設置Stair Generator模塊頻率在0~0.4 s時在100 r/m,0.4 s時升頻至300 r/m,0.6 s時繼續升頻至1 200 r/m,1.6 s時降至600 r/m,而在4 s時又降至300 r/m。不同時間加載及升降頻如圖8所示。
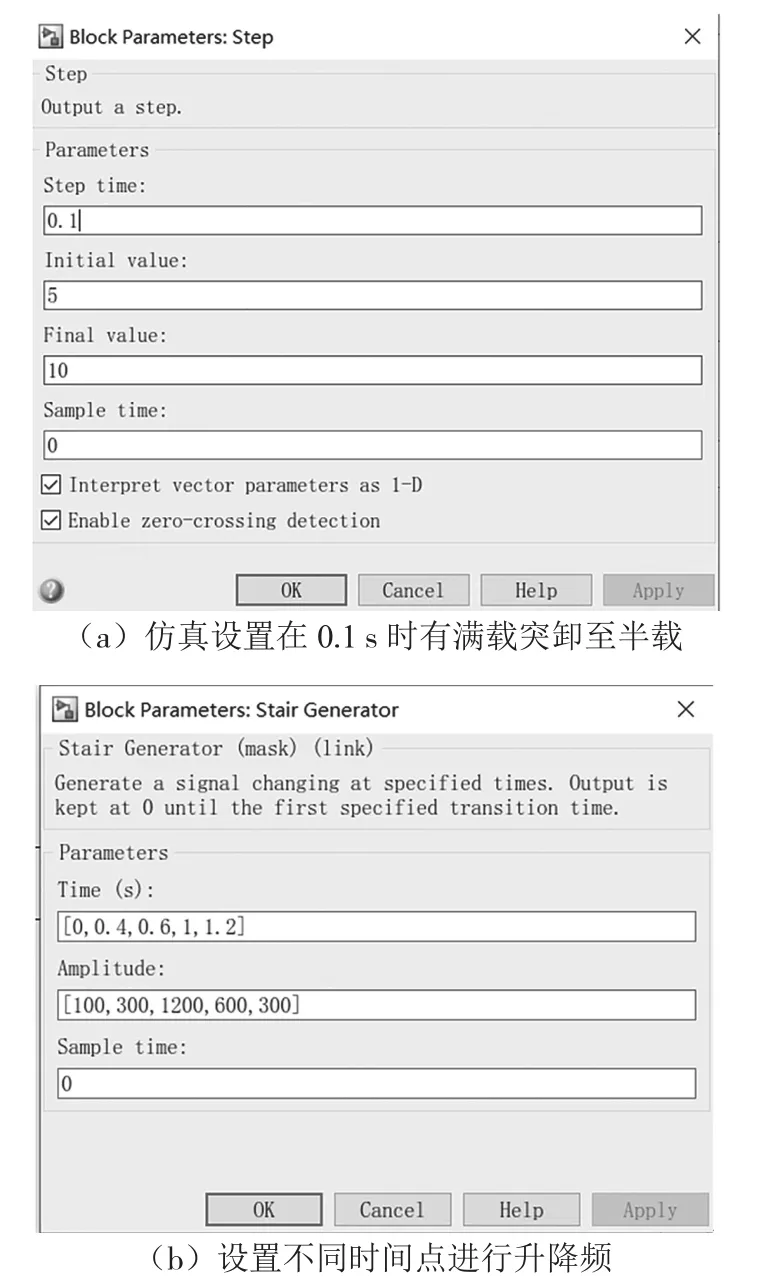
圖8 設定不同時間點進行卸載及升降頻
仿真得到的電機各關鍵參數波形,如圖9所示。
從仿真結果可以得出,定子電流在重載10 N·m、低速100 r/m重載啟動時,三相定子電流波形無畸變,啟動電流及轉矩均在10 A及10 N·m以內,在0.4 s及0.6 s時刻升頻至300 r/m及1 200 r/m時轉速短暫稍有上升,但在100 ms內又快速回到設定值,此時對應轉矩也短暫抖動,但基本在50 ms內快速回到設定值,在1.0 s及1.2 s突然降頻時又快速回歸至設定值,對應轉速及轉矩抖動小。從波形可以看出,基本在80 ms內又回到設定值,對應電機定子電流稍有抖動,但都在可控電流范圍內,無過沖和過流情況發生,轉子實際角度切換平穩,系統運行正常,充分驗證了提出的SPMSM低速下無位置速度傳感器矢量狀態觀測器控制算法的可靠性與可行性。
4 結 論
在Matlab/SiMulink上搭建SPMSM無位置低速矢量控制系統模型進行仿真,驗證電機運行平穩,啟動過程中電流無沖擊,電機轉矩波動小,能適應低速重載下啟動,可實現在最低轉速300 r/m的情況下正常運行。

圖9 電機定子電流、轉速、轉子角度及電磁轉矩波形
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
