大疆精靈4 RTK航測數據在地形圖測繪中的應用
2020-11-09 03:18:23艾力楊冰玉
國土資源導刊 2020年3期
艾力 楊冰玉


摘? 要? 本文以延長縣某工程項目地形圖測繪為案例,采用Phantom4 RTK無人機進行低空航測作業,通過UAV-PPK軟件對航攝成果數據進行解算,獲取更高精度的POS數據,有效提高“空三”加密解算質量,再通過ContextCapture軟件進行航測內業處理,生成了測區DOM和三維立體模型,最后利用EPS軟件在計算機上完成三維裸眼測圖,獲得測區1:500地形圖。結果表明,利用無人機獲取的數據進行測圖,最終成果滿足相應比例尺地形圖成圖精度的要求。
關鍵詞? 大疆精靈4 RTK;UAV-PPK;ContextCapture;地形圖
中圖分類號: P231.5 文獻標志碼: A
文章編號:1672-5603(2020)03-62-4
Abstract: In this paper, combined with a topographic mapping project in Yanchang County, Phantom4 RTK UAV is used to carry out low altitude aerial survey.The UAV-PPK software is used to obtain higher precision POS data, effectively improve the quality of aerial triangulation encryption solution. TheDOM and 3D model of the survey area is generated by aerial survey data processing with ContextCapture. Finally, EPS software is adopted to complete 3D open eye mapping on the computer, and 1:500 topographic map of the survey area is obtained. Itillustrates that the result, which is obtained by mapping from the data of UAV, can meet the requirements of mapping accuracy of topographic maps with corresponding scale.
Keywords: DJI Phantom4 RTK; UAV-PPK; contextCapture; topographic map
近年來,低空無人機攝影測量技術發展迅速[1],在各類項目勘測規劃實施、項目進度監測中開始被接受并大量應用。在前人的研究中,《無人機航測技術在山洪災害調查評價中的應用》一文以陜西商洛某小流域調查為例,介紹了無人機航測技術獲取調查評價所需的高清航片、高精度DEM、河道斷面等信息的流程和方法,表明航測技術能夠滿足山洪災害調查評價工作要求[2]。《無人機航測技術在臨汾浮山斷裂調查中的應用》一文把無人機航測技術應用在臨汾浮山斷裂調查中,將無人機航測技術與傳統野外調查技術進行對比,表明無人機航測技術在斷裂調查中有良好的適用性[3]。大疆Phantom4 RTK無人機是一款小型四旋翼高精度航測無人機,面向低空攝影測量應用,遙控手柄界面友好,具備厘米級定位系統和高性能程序系統,大幅度減少了傳統航測中所需的地面控制點,簡化了作業流程,降低了時間成本,提高了工作效率,其獲取的數據與UAV-PPK、ContextCapture等軟件結合應用,進一步提高了航測的精度[4]。
1? 工程簡介
延長縣某工程項目位于陜西省延長縣城北郊,附近有毛澤東舊居等景點(圖1)。前期地形圖測繪項目主要任務為1:500地形圖測繪。該測區離縣城較近,附近樓宇林立,居民地集中,地形起伏較大,為此外業主要采用無人機航測的方式,內業采用ContextCapture軟件生成正射影像和立體模型,繼而采用EPS軟件進行裸眼測圖。
2? 數據獲取
完成控制測量后,利用Phantom4 RTK無人機進行航攝作業。該無人機質量僅有1391g,便攜小巧,最大起飛海拔高度可達6000m,最大水平飛行速度可達50km/h。啟用RTK時,懸停精度能達到0.1m。Phantom4 RTK無人機平面圖成圖精度能滿足GB/T 7930-2008 1:500地形圖航空攝影測量內業規范的精度要求。此外,該無人機還自帶避障系統,可以大大減小無人機的碰撞風險。由于該無人機質量較輕,導致在風速較大的情況下無法起飛,且電池容量僅能支持最長30分鐘的續航,因此有一定的局限性,適合地形不是非常復雜且小范圍的測區使用。
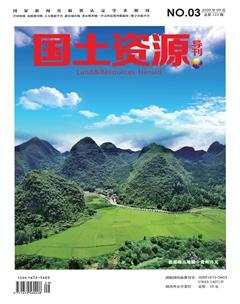
此次工程的1:500的地形圖測繪對高程精度要求較高,而采用內置RTK技術的Phantom4 RTK無人機在無相控條件下可滿足小范圍大比例尺(1:500)地形圖測繪的平面精度要求,但高程精度不能滿足規范要求[5];若加入少量控制點,平面和高程精度均有大幅提高,不同像控布設方案檢查點精度統計實驗表明,像控點個數在5個、7個時達到1:500測圖精度要求[6]。故飛機起飛之前,先在測區范圍內均勻布設了7個像控點,如圖2所示。然后設置航飛路線,路徑選擇常規航測路線,飛行高度為250米,航向重疊度80%,旁向重疊度60%,之后無人機按照布設的航線,用兩架次飛行拍照40分鐘后,完成航測任務安全降落(圖3)。任務獲取原始影像234張,經檢查,影像清晰,色彩均勻,符合航測內業的要求。
3? 數據處理
Phantom4 RTK無人機獲取的影像本身包含了POS信息,可以進行內業處理。首先,利用UAV-PPK軟件解算出無人機飛行過程中在空中的空間三維坐標。
3.1 后差分解算
將飛行時獲取的基站數據及原始照片POS導入軟件,獲取基站空間坐標和參數,然后設置好坐標系(本次采用CGCS2000坐標系)和測區所在3度帶的中央經線111°E。設置完畢后進行解算,成果如圖4所示。無人機航片所記錄的高程為基于橢球的大地高,而基站實測數據為正常高,本項目所采用的高程均為正常高,故后差分前后的高程有30米左右的差距。對于水平坐標,后差分結果與原始POS的誤差在厘米級別,也表明無人機RTK測圖精度較高。
3.2 正射影像生產與三維模型重建
解算完畢后,利用ContextCapture軟件進行DOM和DSM模型的重建和空中三角測量。ContextCapture軟件處理的具體流程如下[7]:
(1)打開軟件,新建工程,注意工程名稱及工程目錄只能包含英文字符;
(2)新建區塊,在區塊中添加影像,將234張原始影像選中并導入工程;
(3)將UAV-PPK的解算成果導入,進行空三測量;
(4)刺入控制點,點擊左側任務樹中的Chunk1,然后點擊測量(survey)選項卡,點擊編輯控制點出現像控點編輯界面。刺點完成后在ContextCapture中再次提交空三。若外業沒有布置相片控制點,可直接跳過本步。空中三角測量控制點精度見表1。
(5)在模型重建過程中設置瓦片。分塊大小建議1/3到2/3之間,可以導入KML文件以確定建模范圍,去除多余區域,節省建模時間。
(6)數據生產結果可保存為不同格式;若模型將來需要修正,可導出“osgb”格式的數據;若僅為瀏覽,建議選擇導出不可修改的“3mx”格式的數據形式。
(7)生成三維模型后可以再次提交生產項目,最終生成正射影像。
從表1中可以看出,“空三”解算嵌入后差分處理后,控制點的三維空間精度均可達到厘米級。“空三”處理成功后,我們又利用ContextCapture輸出了正射影像及立體模型,如圖5所示,以便后續采用EPS軟件實現在計算機上測圖。最終測區1:500地形圖成圖如圖6所示。
4? 結論
通過本次工程項目的實施,發現Phantom4 RTK無人機航測結合UAV-PPK,獲取的數據確實具備厘米級定位的精度要求,驗證了Phantom4 RTK獲取的高精度的POS數據信息,一定區域內在無地面像控點的情況下,平面位置精度滿足大比例尺(1:500)地形圖測繪要求,高程精度需要布設少量的地面像控點方能精度要求。這說明利用Phantom4 RTK結合UAV-PPK、ContextCapture等內業處理軟件,可以大幅度減少傳統航測中所需的地面控制點,有效地提高地形圖精度,影像中可以直接采點提取地面的地形,從而將大部分工作量從外業測量轉向內業計算機測圖,最大限度地降低了測量人員外業勞動強度,提升了測量工作效率及測繪產品的質量。
參考文獻/References
[1]田野,向宇,高峰,等.利用Pictometry傾斜攝影技術進行全自動快速三維實景城市生產-以常州市三維實景城市生產為例[J].測繪通報,2013(2):59-62.
[2]劉昌軍,郭良,岳沖.無人機航測技術在山洪災害調查評價中的應用[J].中國防汛抗旱,2014(3):3-7.
[3]任瑞國,閆小兵,陳永前.無人機航測技術在臨汾浮山斷裂調查中的應用[J].山西地震,2019(4):27-30.
[4]邱潔,樂文強,黃軍勝.大疆Phantom4 RTK無人機航測在工程中的應用[J].企業科技與發展,2019(6):134-135.
[5]中華人民共和國國家質量監督檢驗檢疫總局,中國國家標準化管理委會.GB/T7930-20081:5001:10001:2000地形圖航空攝影測量內業規范[S].北京:中國標準出版社,2008.
[6]朱小飛,楊瓏,彭安安.Phantom4 RTK在1:500地形圖測繪中的精度分析[J].江西建材,2019(8):44-46.
[7]郭有寶.大疆Phantom4 RTK三維建模內業處理流程[J].黑龍江交通科技,2020(6):190-192.
猜你喜歡
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
浙江國土資源(2019年10期)2019-10-31 03:17:00
建材發展導向(2019年10期)2019-08-24 06:25:28
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
江西建材(2018年4期)2018-04-10 12:37:38
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
中國公共安全(2017年7期)2017-10-13 08:18:11
電子制作(2017年9期)2017-04-17 03:01:00
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21