
航天器非合作交會一體化控制仿真研究
2020-11-09 03:14:14劉歌群顧冬晴劉曉坤
科技創(chuàng)新與應用 2020年32期
關鍵詞:仿真
劉歌群 顧冬晴 劉曉坤

摘 ?要:非合作交會對接對于航天器在軌服務異常重要。文章研究了航天器姿軌一體化的6自由度交會控制仿真技術。文章建立了航天器軌道計算、姿態(tài)計算、相對位置計算和控制律計算仿真模型,通過對典型停泊點參數跟蹤控制效果的計算,驗證了所設計仿真模型的正確性。
關鍵詞:交會對接;一體化控制;仿真
中圖分類號:V448 ? ? ? ? ?文獻標志碼:A ? ? ? ? 文章編號:2095-2945(2020)32-0012-04
Abstract: Non-cooperative rendezvous is very important for on orbit service of spacecrafts. The simulation technology of 6-DOF integrated rendezvous control is studied in this paper. Simulation models for spacecraft orbit calculation, attitude calculation, relative position calculation and control law calculation are established. The correctness of the simulation models is verified by the calculation of tracking control on a typical mooring point.
Keywords: rendezvous; integrated control; simulation
1 概述
空間交會對接對于航天飛行器的在軌組裝、維修、維護、物資交換、補給、人員訪問等高級空間操作提供了技術前提,是現代航天工業(yè)的核心技術之一。當交會對接的一方航天器不能提供有效的合作信息或者不主動配合交會對接任務時,這類航天器就構成了非合作目標,交會對接任務就演變?yōu)閺碗s的非合作交會對接問題。非合作交會對接技術對于故障航天器的在軌捕獲與維修、空間垃圾的清除、敵方航天器的捕獲等任務至關重要,是航天技術領域又一個制高點。在合作交會對接技術相對成熟的今天,非合作交會對接技術因為其重要性和實現方法的復雜性成為世界各國航天領域的研究熱點[1-3]。
空間交會對接是兩個航天器在空間軌道上會合并在結構上連成一個整體的操作技術。為成功實現飛行器的交會對接,不僅要讓兩個飛行器在位置上靠近,還要對飛行器的姿態(tài)進行控制、調整,以實現兩個飛行器最后的聯接。對于飛行器姿態(tài)控制所涉及到的運動學和動力學,一般可以將它歸結為剛體的姿態(tài)控制問題。描述飛行器的姿態(tài)的方法有很多,如:歐拉角法、羅覺格斯參數法、四元數法等[1-5]。為了實現航天器軌道和姿態(tài)的一體化控制,應在控制器的設計過程中充分考慮軌道和姿態(tài)的耦合影響。其實現方法主要有以下兩種:第一種首先獨立設計姿態(tài)控制器和軌道控制器,然后再對姿軌耦合部分進行控制修正;第二種以姿軌耦合動力學模型為基礎設計一體化控制算法,這種方法就是所謂的姿軌同步控制方法。姿軌同步控制方式雖然需要建立姿軌耦合動力學模型,但是由于可以直接利用許多現有的控制器設計方法,因此已經成為目前較為常用的方法[6-8]。對于非合作交會姿軌耦合一體化控制研究來說,建模仿真是其中必不可少的基礎環(huán)節(jié),對于模型分析、算法驗證、控制性能計算、動態(tài)過程模擬具有重要的意義。為此本文基于四元數描述的非合作交會數學模型,建立一套仿真軟件,探索非合作交會的仿真建模技術。
2 航天器軌道運動計算
設橢圓軌道六根數分別為:半長軸a,偏心率e,真近點角?茲,軌道傾角i,近地點幅角?棕,升交點赤經?贅。
2.1 航天器在地心慣性坐標系中的位置矢量r
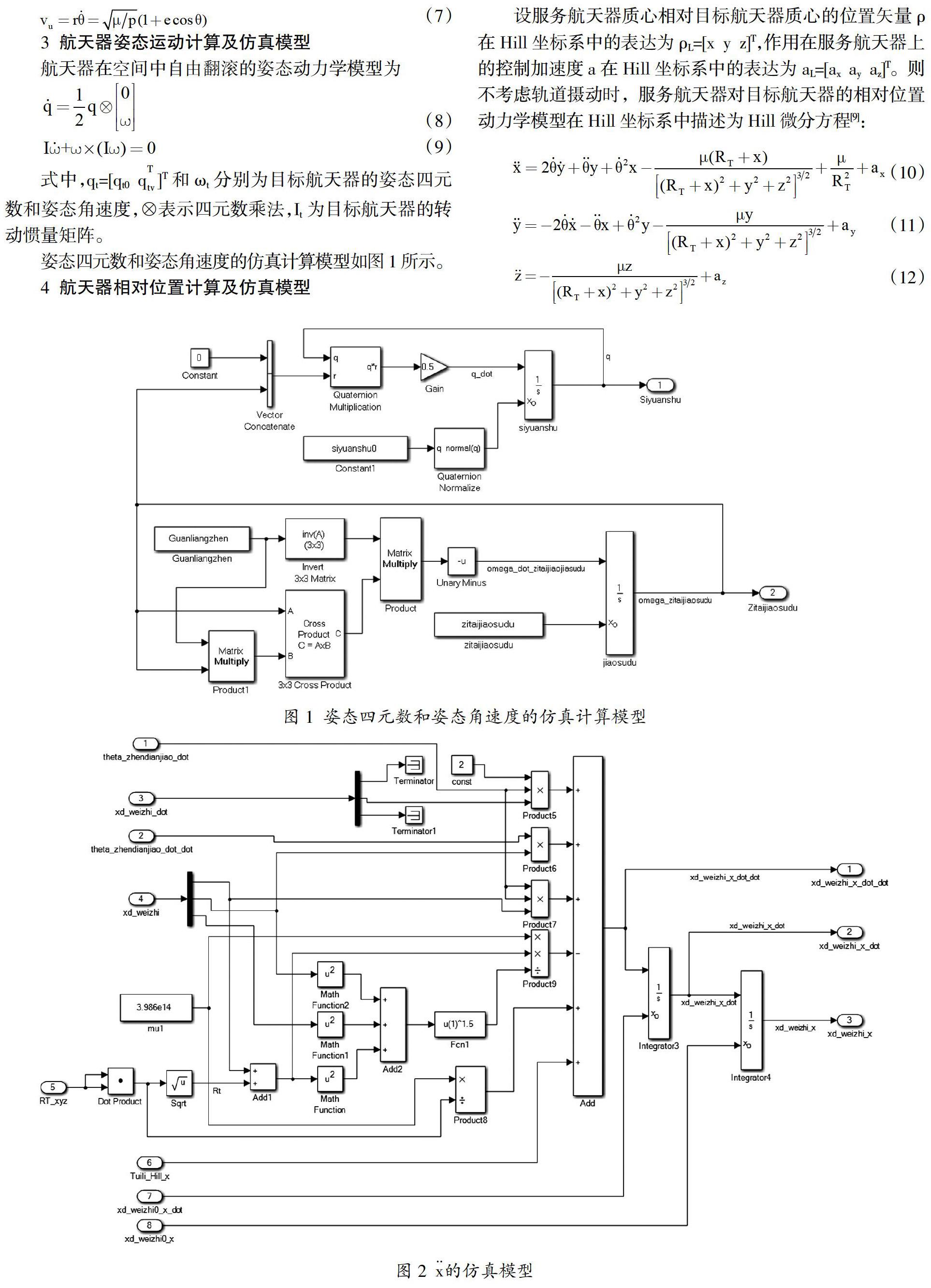
姿態(tài)四元數和姿態(tài)角速度的仿真計算模型如圖1所示。
4 航天器相對位置計算及仿真模型
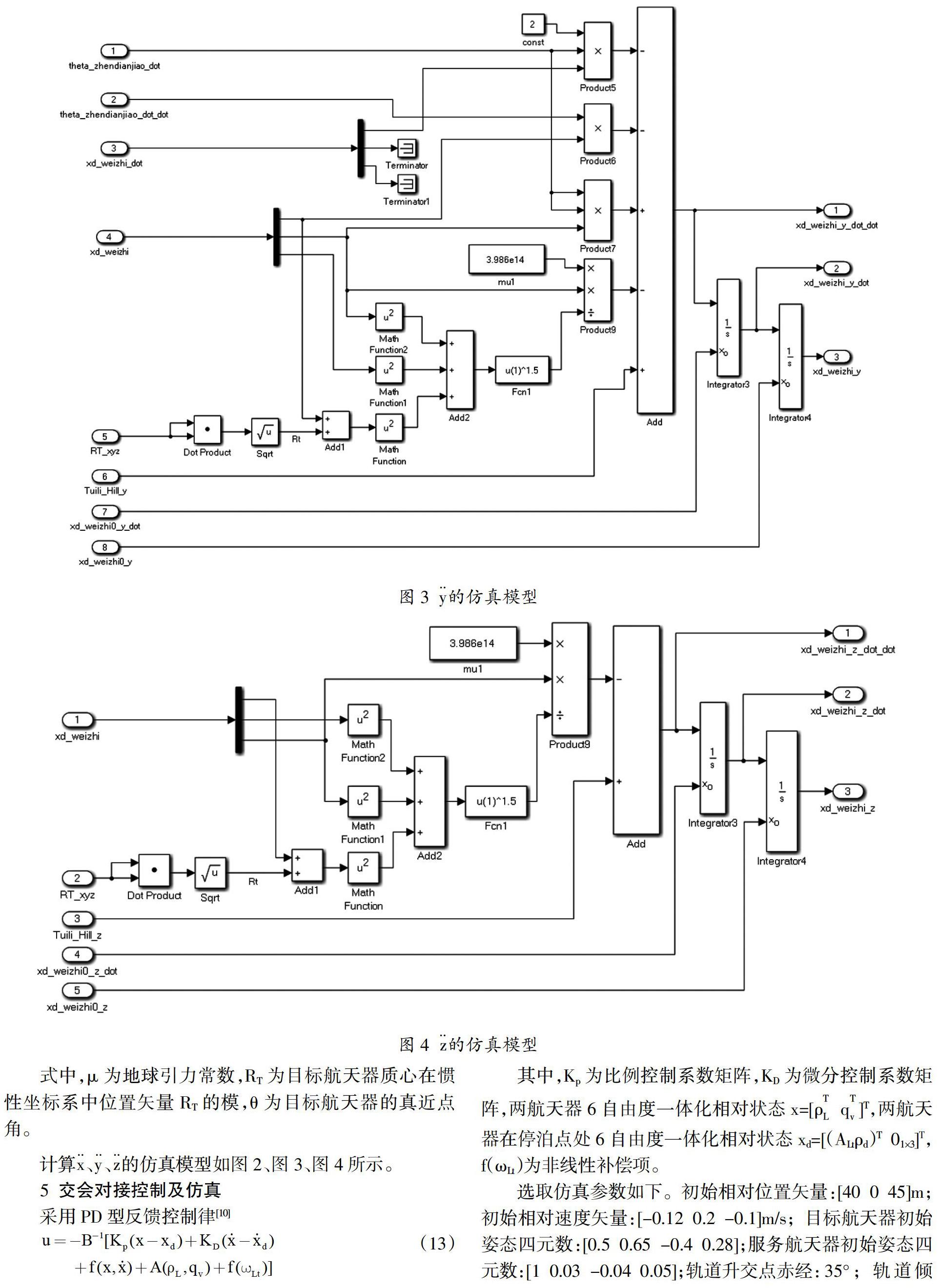
設服務航天器質心相對目標航天器質心的位置矢量?籽 在Hill坐標系中的表達為?籽L=[x y z]T,作用在服務航天器上的控制加速度a在Hill坐標系中的表達為aL=[ax ay az]T。則不考慮軌道攝動時,服務航天器對目標航天器的相對位置動力學模型在Hill坐標系中描述為Hill微分方程[9]:
選取仿真參數如下。初始相對位置矢量:[40 0 45]m;初始相對速度矢量:[-0.12 0.2 -0.1]m/s;目標航天器初始姿態(tài)四元數:[0.5 0.65 -0.4 0.28];服務航天器初始姿態(tài)四元數:[1 0.03 -0.04 0.05];軌道升交點赤經: 35°;軌道傾角:40°;軌道近地點幅角:12°;軌道真近點角:0°;軌道偏心率:0.005;軌道半長軸:7500km;比例控制系數矩陣:diag(0.45,0.45,0.45,0.24,0.24,0.24);微分控制系數矩陣:diag(1.3,1.3,1.3,0.7,0.7,0.7)。
由所選參數可知,目標航天器處于自由翻滾狀態(tài),是一個非合作目標,設定目標停泊點為[10,0,0]m,服務航天器在跟隨目標航天器翻滾的同時要停泊在目標航天器主慣量軸后方10m處。運行仿真200秒,得到仿真曲線如圖5。
從圖(a)與圖(b)可見,服務航天器實現了停泊點上相對目標航天器的位置控制。因為目標航天器在自由翻滾,這種翻滾的點運動在Hill坐標系中的位置矢量和速度矢量均呈現正弦規(guī)律,所以圖(a)與圖(b)的曲線都是正弦曲線。圖(c)與圖(d)顯示,兩航天器相對姿態(tài)四元數和相對姿態(tài)角速度在15秒之后趨于0,說明服務航天器很好的實現了對目標航天器的姿態(tài)跟蹤。圖(e)及圖(f)說明,在兩航天器初始位置初始姿態(tài)相差較大的時候,服務航天器需要較大的推力和控制力矩進行機動,以實現對目標航天器的位置和姿態(tài)跟蹤。當一體化控制使服務航天器到達停泊點并實現姿態(tài)保持后,服務航天器僅需要較小的推力和控制力矩即可實現停泊點上的位置與姿態(tài)保持。以上結果說明,仿真模型的設計是正確的。
6 總結
本文針對在軌服務環(huán)境下的航天器非合作交會對接問題,研究了姿軌耦合一體化控制的仿真技術,利用Simulink設計了兩航天器相對運動及PD型反饋控制仿真模型。模型包括航天器軌道計算、姿態(tài)計算、相對位置計算和控制律實現等幾個方面,文章給出了各個計算模型的具體構成,并利用一組具有代表性的仿真參數,計算了目標航天器具有自由翻滾非合作運動時的最后逼近段停泊點處的跟蹤控制效果。仿真計算結果驗證了所設計模型的正確性。本文所設計模型對于航天器非合作交會的仿真建模技術具有參考意義。
參考文獻:
[1]吳宏鑫,胡軍,解永春.航天器智能自主控制研究的回顧與展望[J].空間控制技術與應用,2016,42(1):1-6.
[2]馬一科.橢圓軌道飛行器交會對接若干控制問題的研究[D].中國科學技術大學,2014.
[3]高翔宇.航天器軌道交會魯棒和最優(yōu)控制設計[D].哈爾濱工業(yè)大學,2014.
[4]F Zhang, G R Duan. Integrated translational and rotational finite-time maneuver of a rigid spacecraft with actuator misalignment[J].Iet Control Theory & Applications, 2012,6(9):1192-1204.
[5]P Singla, K Subbarao, J L Junkins. Adaptive Output Feedback Control for Spacecraft Rendezvous and Docking Under Measurement Uncertainty[J].Journal of Guidance Control & Dynamics,2012,29(4):892-902.
[6]王劍穎.航天器姿軌一體化動力學建模、控制與導航方法研究[D].哈爾濱工業(yè)大學,2013.
[7]朱戰(zhàn)霞,馬家瑨,樊瑞山.基于螺旋理論描述的空間相對運動姿軌同步控制[J].航空學報,2016,37(09):2788-2798.
[8]王磊,袁建平,羅建軍.接近非合作目標的部分狀態(tài)反饋姿軌聯合控制[J].計算機仿真,2013,30(9):41-45+73.
[9]Bando Mai, Ichikawa Akira. Graphical Generation of Periodic Orbits of Tschauner-Hempel Equations[J].Journal of Guidance, Control, and Dynamics,2012,35(3):1002-1007.
[10]盧偉,耿云海,陳雪芹,等.在軌服務航天器對目標的相對位置和姿態(tài)耦合控制[J].航空學報,2011,32(5):857-865.
猜你喜歡
中國教育技術裝備(2016年20期)2016-12-12 10:09:15
中小企業(yè)管理與科技·下旬刊(2016年10期)2016-11-18 20:57:34
科技資訊(2016年18期)2016-11-15 20:09:22
科技資訊(2016年18期)2016-11-15 07:55:28
價值工程(2016年29期)2016-11-14 02:01:16
電子技術與軟件工程(2016年18期)2016-11-14 00:46:54
數字技術與應用(2016年9期)2016-11-09 23:25:33
數字技術與應用(2016年9期)2016-11-09 22:09:07
科技視界(2016年18期)2016-11-03 21:44:44
科技視界(2016年18期)2016-11-03 20:31:49
