新型SAR實時成像光學系統設計
2020-11-05 03:18:08蔡志鵬張星祥畢國玲王洪鈞
液晶與顯示 2020年11期
關鍵詞:系統
蔡志鵬, 張星祥, 陳 哲, 畢國玲, 王洪鈞
(中國科學院 長春光學精密機械與物理研究所,吉林 長春130033)
1 引 言
合成孔徑雷達(SAR)具有全天時、全天候以及適應各種復雜惡劣天氣工作的能力,是非常重要的遙感成像技術,可以用于目標識別、跟蹤等任務。星載SAR數據實時成像系統是星載SAR系統在許多先進應用中的關鍵技術。圖像的機載分析可以提供有效的特征識別線索,選擇適當的圖像進行傳輸,可以降低對數據傳輸系統的要求。光學系統由于其并行的處理能力,使得SAR數據實時成像成為可能[1-2]。
SAR第一個光學處理器由球形、圓柱形和錐形透鏡串聯組成,稱為錐形透鏡光學處理器,該系統從1957年至1964年被廣泛使用。然后開發出斜平面光學處理器,其在多功能性和靈活性方面得到顯著改進,并且還生成了像質較好的圖像[3-5]。錐形透鏡的光學處理器可以從信號處理的角度解釋,作用效果為互相關或匹配濾波,而斜平面處理器通常用全息術來理解,利用了菲涅爾近似。
傳統的光學處理器系統龐大,很難適用于小型載機或者無人機。但光學處理器的優勢隨著空間光調制器(SLM)和CCD等器件的發展應運而生,就新一代SAR光學處理器而言,加拿大國家光學研究所(INO)的研究人員在該領域做了大量的研究,并且已經有樣機投入使用,有效證明了SAR光學處理器的可行性和發展前景,該樣機使用了先進的光學元件SLM轉換SAR原始數據,被用于實時處理ENVISAT衛星上的ASAR產生的SAR原始數據,但不能進行其他提高分辨率的復雜處理,比如距離多普勒算法(Range Doppler Algorithm, RDA)中的距離徙動校正(Range Cell Migration Correction, RCMC)和二次相位壓縮(Secondary Range Compression, SRC)[6-8]。上海交通大學對SAR光學處理器也進行了研究,提出了一種區別于加拿大光學實驗室提出的光學處理器,該處理器采用4f光學結構進行傅里葉變換處理,利用頻譜面上的SLM完成SAR相關成像算法[9]。目前,國內使用的SAR實時成像方法在功耗、體積、處理速度和穩定性方面都不能很好地滿足SAR在軌實時成像需求,也沒有適用于星載使用的SAR數據實時成像光學處理器模型。
本文在利用SLM的基礎上,以斜平面處理器為依托,設計系統長度更小的SAR數據實時成像光學系統。有效縮短了系統的長度、口徑和重量,從而可以實現星載或無人機等探測的實時成像。
2 SAR成像光學處理器原理模型
2.1 SAR數據記錄
SLM本質上是二維透射(或反射)的波前調制器件。SLM由很多小液晶盒組成,它們在空間上排列成二維陣列[9-10]。每個小液晶盒由各自的電信號或光信號控制,由于液晶的電學性質,這些信號的變化會影響盒內液晶的排列,從而改變小盒的光學性質。這樣照射在小盒表面的激光就受到相應的幅度或相位調制。利用該特性轉化SAR原始信號后,代替傳統光學處理器中的膠片。但是不能在同一塊SLM上同時實現相位和幅度的調制,因此需要兩塊共同作用。現將SAR數據的幅度信息調制到第一塊SLM上,第二塊在相位模式下運行,利用平行光將第一塊SLM上的幅度信息調制到第二塊SLM上,使其具有完整的SAR數據,作用和膠片的作用此時完全相同,但調制時間為SLM光電轉化的時間,可視為實時轉化,以此作為SAR數據實時成像光學系統的輸入。利用CCD或CMOS相機作為SAR圖像的接收裝置。
星載SAR的工作原理如圖1所示,載機的飛行方向稱為距離向,與飛行方向正交的測量方向稱為方位向。

圖1 SAR系統的幾何關系圖Fig.1 Geometric relationship of SAR system
SLM經過調制攜帶完整的SAR數據,即地面上的點目標散射的回波生成的二維線性調頻信號,其作用相當于一個全息干板。經過平行光照射時會發生聚焦作用。對于距離向信號,聚焦焦距fr:
(1)
對于方位向信號,聚焦焦距fa:
(2)
式中,λl為光波波長,Kr為發射信號的調頻率,q為SLM距離向縮尺比,λl為光波波長,R為測量點和接收點之間的距離,p為方位向縮尺比。
2.2 SAR數據光學處理
由式(1)和式(2)可知,兩個方向的聚焦情況有很大的不同,其中距離向聚焦焦距為一常數,即距離焦平面為一垂直平面,方位向聚焦焦距和R成正比,并且R隨著載機的運動是不斷變化的,因此方位焦平面是一傾斜平面。一般來說,這兩個平面的位置是不重合的。同時,原始數據是來自多個目標的信號在SLM上重疊得到的,為了區分這些目標,提高分辨率并生成最終的圖像,需要對距離向和方位向壓縮原始數據,在光學處理器中為傅里葉變化。針對以上問題,提出了SAR數據光學處理器的理論結構。SAR數據實時成像光學處理器原理模型如圖2所示。主要解決的問題是:
(1)對不重合的距離焦平面和方位焦平面成像位置的校正;
(2)對方位焦平面傾斜角的校正;
(4)實現距離向信號壓縮,即對信號執行傅里葉變化。
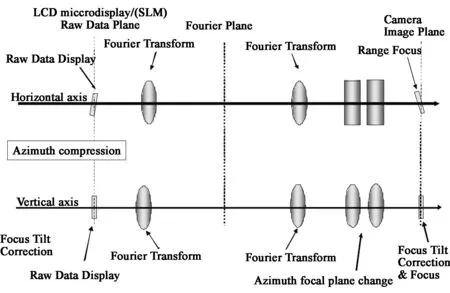
圖2 SAR數據實時成像光學系統原理圖Fig.2 Principle of SAR data real-time imaging optical system
在光學處理中,兩個球面鏡為焦距相等的球面鏡,用來對距離向信號進行壓縮,成像的同時還需要具有傅里葉變換功能。柱透鏡部分和球面鏡共同作用,對方位向進行壓縮。兩個方向的作用效果不同,將不重合焦平面校正到同一位置的同時,利用望遠系統橫向放大率和縱向放大率不同的能力,校正方位焦平面的傾斜角。兩個焦平面同時進行互不干擾的處理過程,像平面對應相機,即CCD或CMOS。又由于望遠鏡校正傾角的能力有限,不能將傾斜平面校正到完全直立的狀態,需要將SLM引入一個較小的傾斜角度,使得兩個焦平面成像后的像面完全重合。
3 新型SAR數據實時成像光學處理器
3.1 球面鏡設計
球面鏡部分處理距離焦平面時,由于距離焦平面為一垂直的平面,不需要對其進行傾角的校正,因此選擇焦距相同的雙鏡望遠系統,又因為想對距離向進行信號壓縮和空間濾波,提高成像質量,因此球面鏡還具有傅里葉變換的功能。由于傅里葉透鏡與傳統的成像透鏡不同[11-12],設計時需要注意以下幾點:
(1)傅里葉變換透鏡必須對兩對共軛位置校正除畸變以外的全部像差,一對是以輸入面處衍射后的平行光作為物方(相當于物在無窮遠),對應的像方是頻譜面;另一對是以輸入面作為物體,對應的像方為無窮遠處。
(2)傅里葉透鏡必須滿足正弦條件,即在設計時需要令平行入射后經過傅里葉透鏡折射后輸出光線的主光線平行于光軸。
(3)為了避免相干噪聲,在設計時應該盡量減少鏡片的數量,結構緊湊。
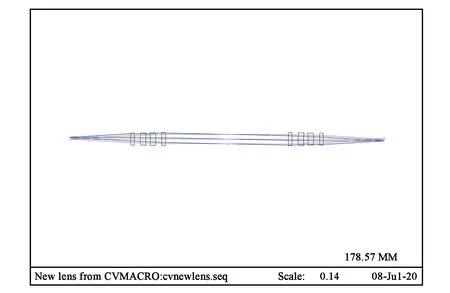
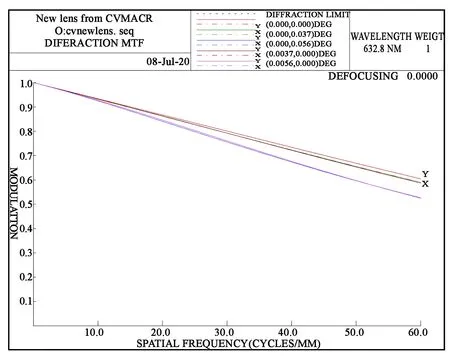
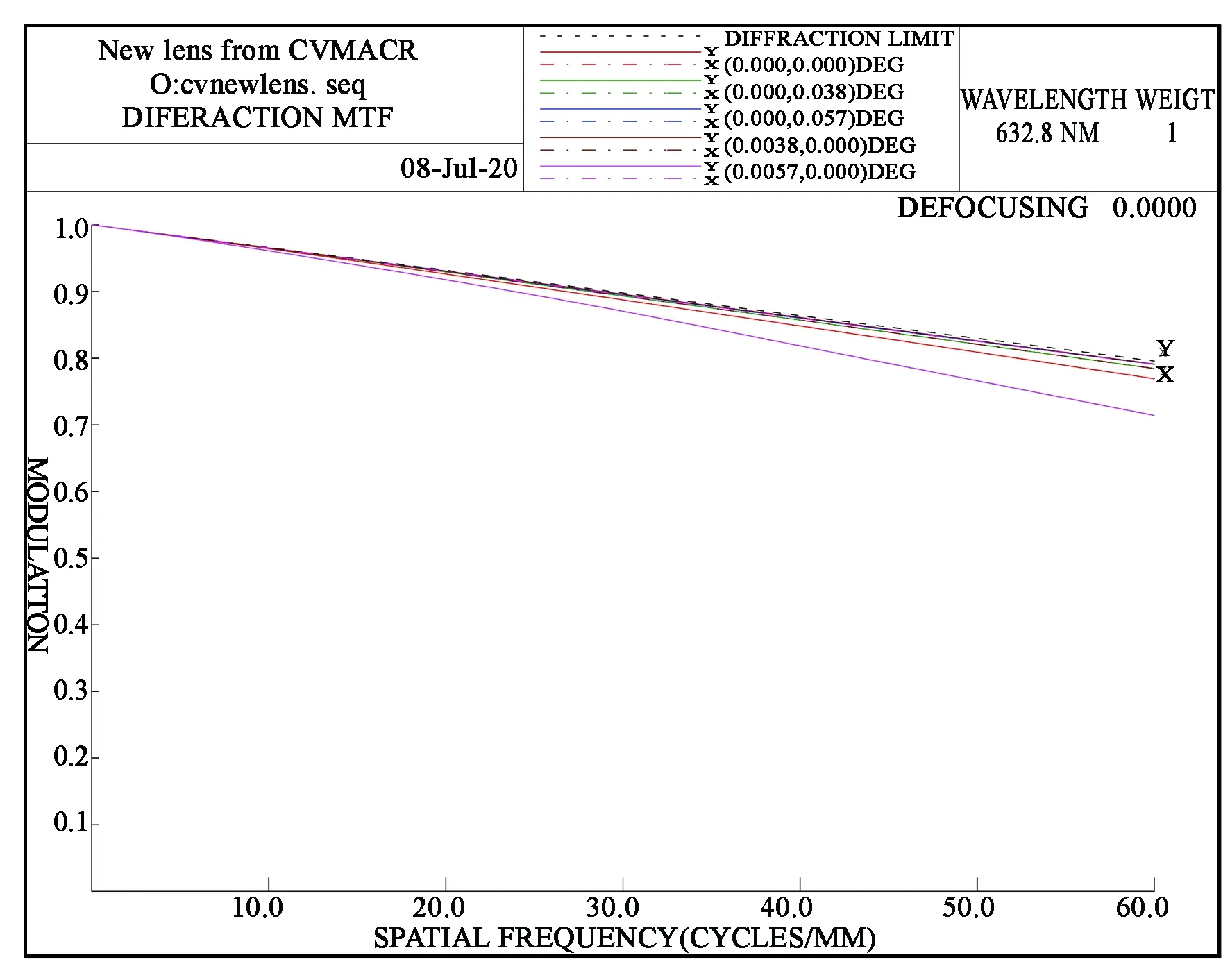
本文在設計時采用了四組元全對稱的設計方法,設計時要注意入瞳的直徑要略大于SLM的斜直徑,否則方位向由于方位焦距過大,光束較為發散,容易造成口徑不夠的情況。在反復多次的嘗試后,選擇入瞳直徑為30 mm,焦距為350 mm,視場角為2w=6°的傅里葉透鏡結構,設計結構參數見表1,光學系統結構和成像質量如圖3所示。
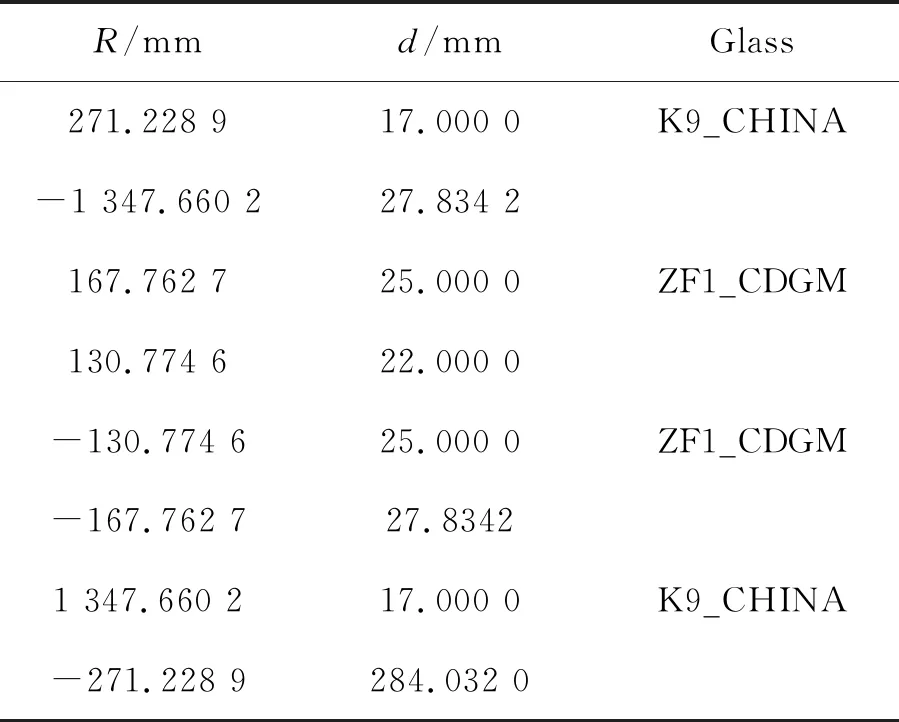
表1 傅里葉透鏡結構參數Tab.1 Structure parameters of Fourier lens
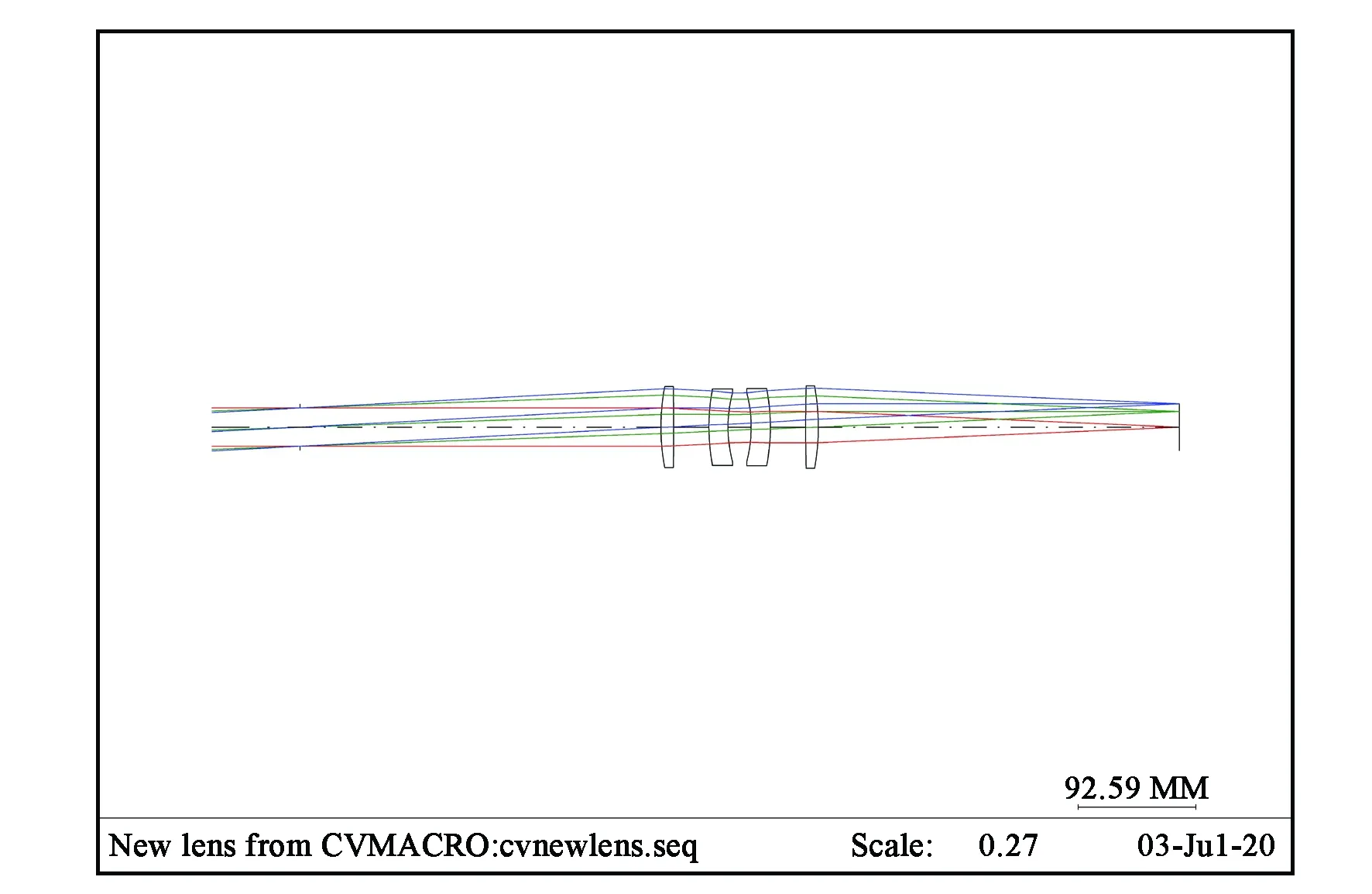
(a)傅里葉透鏡結構(a)Structure of Fourier lens
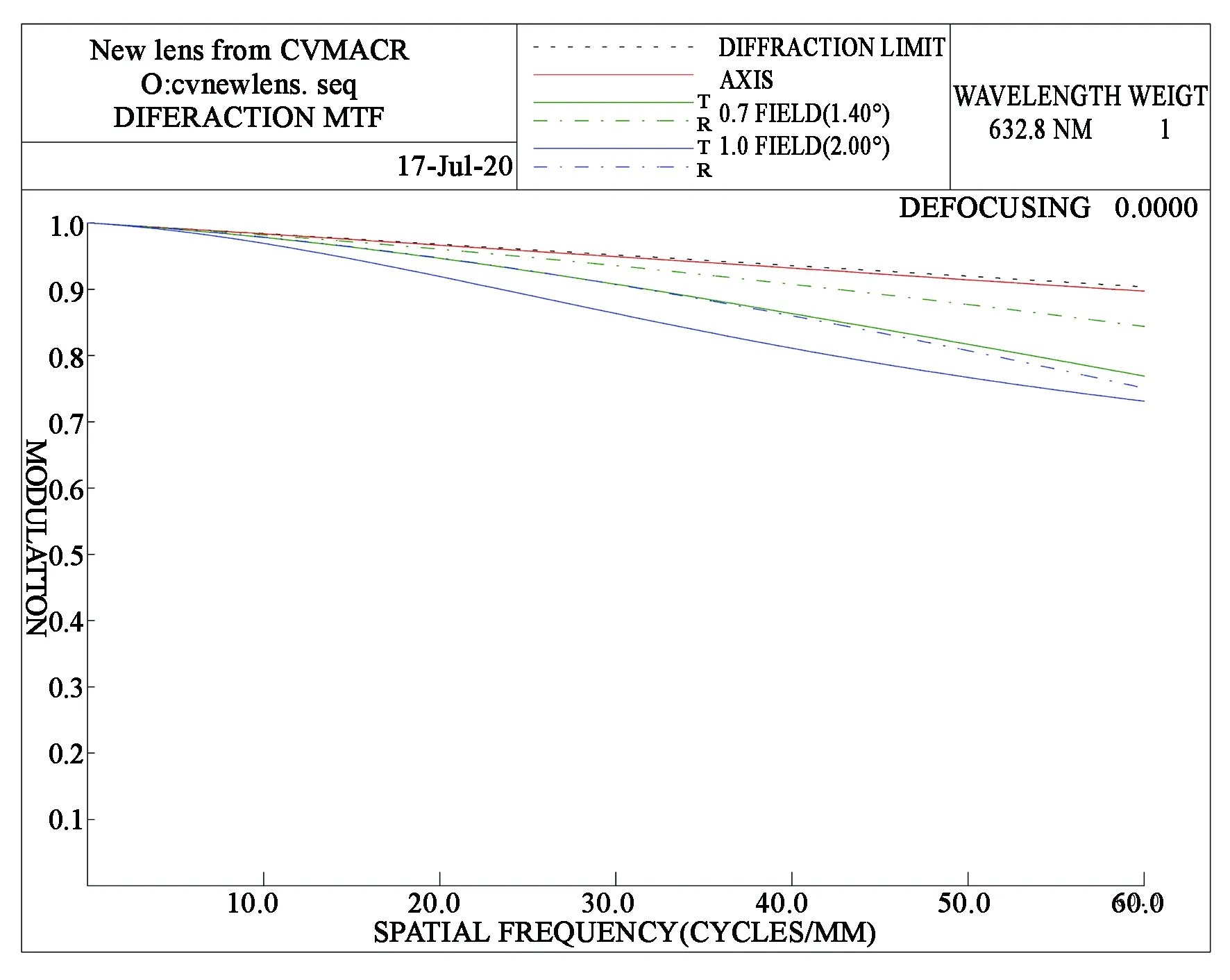
(b)傅里葉透鏡MTF(b)MTF of Fourier lens圖3 傅里葉透鏡結構和MTFFig.3 Structure and MTF of Fourier lens
(a)球面鏡結構(a)Structure of spherical mirror
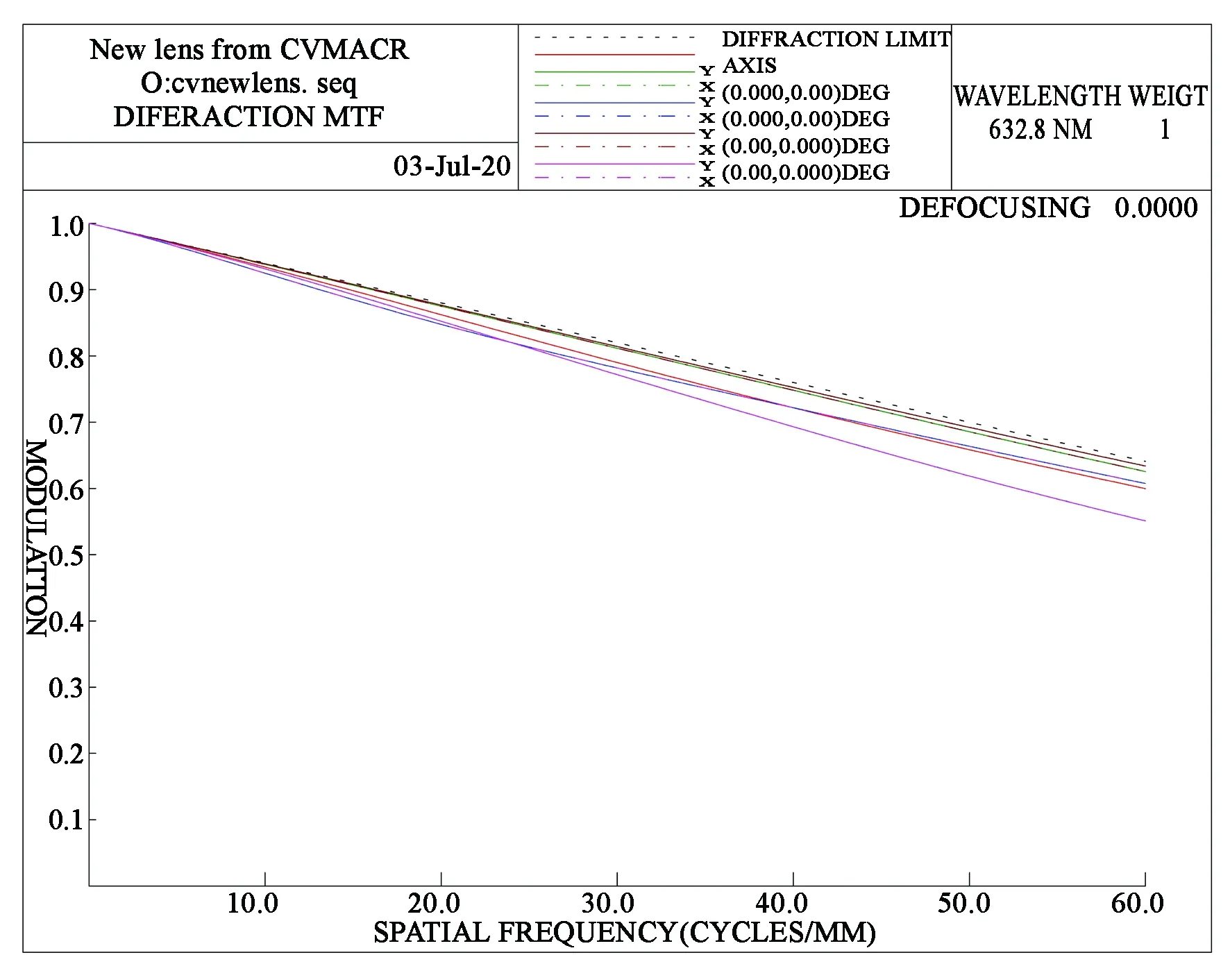
(b)球面鏡MTF(b)MTF of spherical mirror圖4 球面鏡結構和MTFFig.4 Structure and MTF of spherical mirror
設計結果滿足使用要求,因為需要焦距相等的望遠系統,為了設計和制造簡單,球面鏡部分使用設計好的四組元全對稱結構,此時光闌放置在頻譜面。球面鏡部分設計結果和成像質量如圖4所示。
3.2 柱透鏡設計
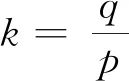
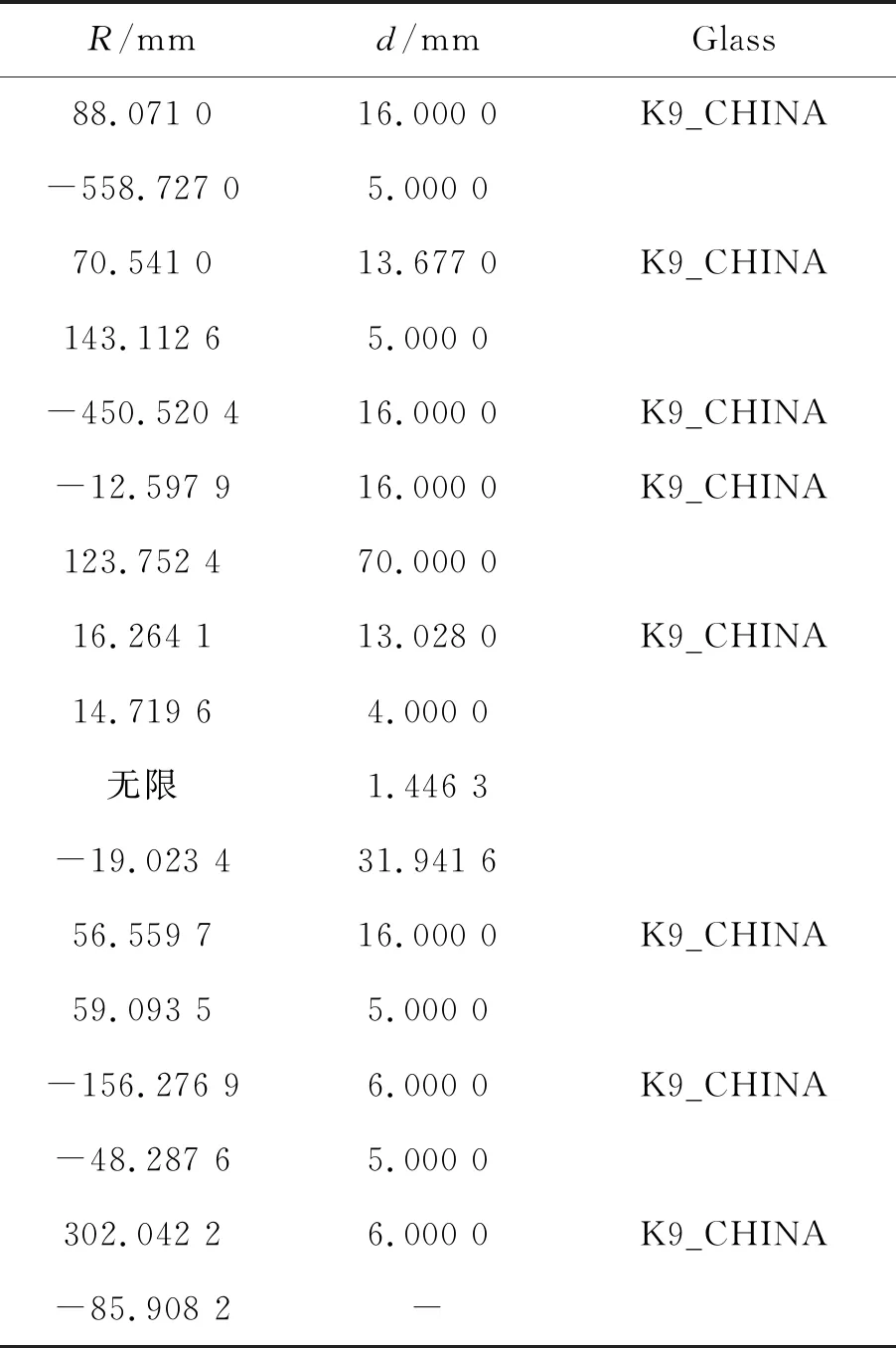
表2 柱透鏡結構參數Tab.2 Structure parameters of cylindrical lens

(a)柱透鏡結構(a)Structure of cylindrical lens
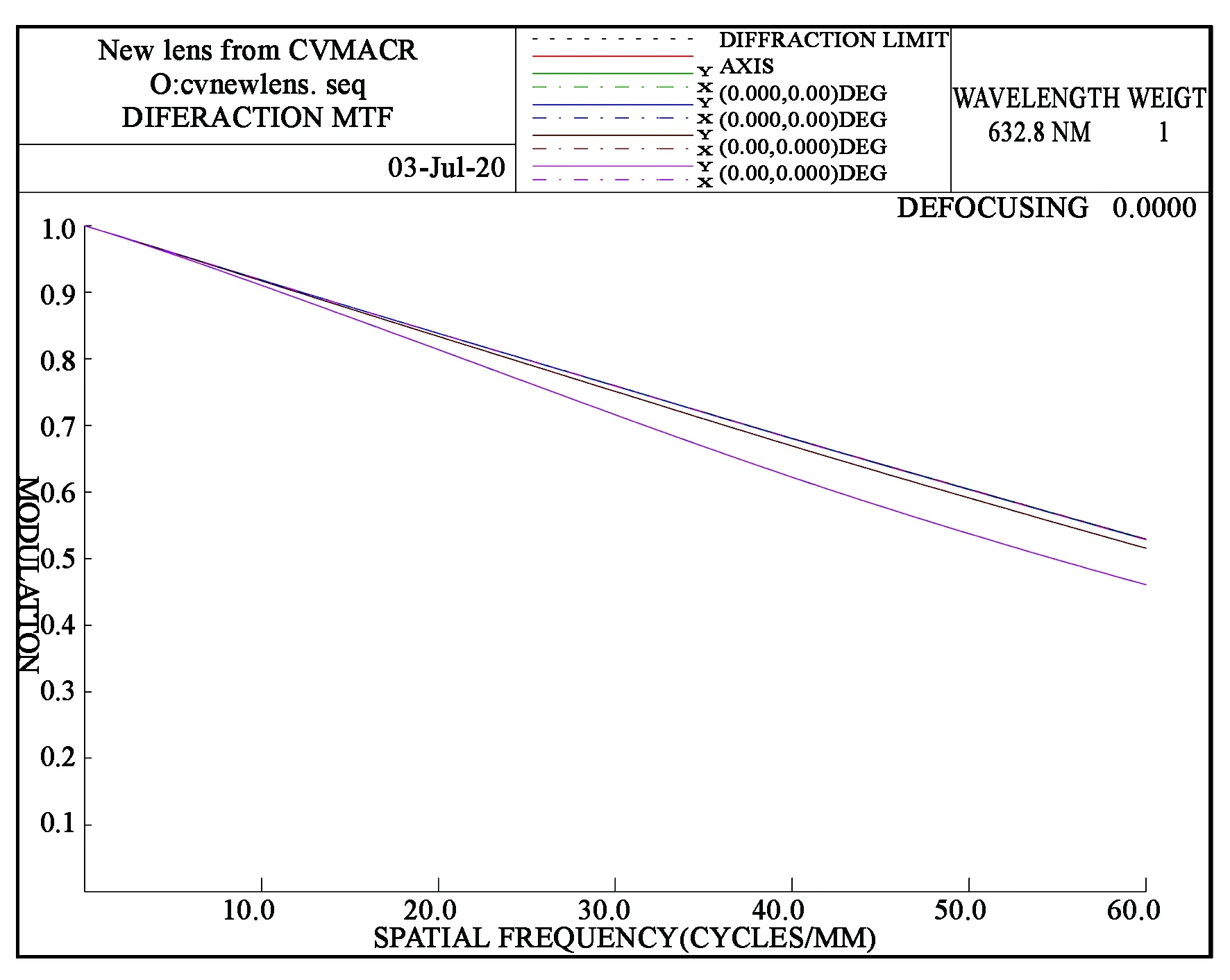
(b)柱透鏡MTF(b)MTF of cylindrical lens圖5 柱透鏡結構和MTFFig.5 Structure and MTF of cylindrical lens
3.3 合成優化
該系統相對于傳統的成像系統略有不同。該系統是對一個二維分開的物體成像,因此在合成后的成像質量要分成兩個方向分別優化評價。其中,距離向可以看作是球面鏡和平行平板作用共同成像,平行平板只會造成成像位置的偏移,不會對像質造成大的影響,也不會因為平行平板位置的改變而改變像質和成像位置。所以距離向不需要太多的調整就可以達到較好的成像質量。因此先考慮方位向成像優化。
對于方位向成像優化,我們將SLM放置在球面鏡的前焦距上,且經過處理,可以令距離向焦距fr=0,方位向焦距fa=457 mm,即聚焦后的方位向焦平面距離球面鏡的前焦平面(即SLM前)457 mm處,聚焦后的距離焦平面與SLM重合,優化結果如圖6所示。

(a)方位向結構(a)Structure of azimuth
(b)方位向MTF(b)MTF of azimut圖6 方位向結構和MTFFig.6 Structure and MTF of azimuth
在此,為了獲得較好的成像質量,采用兩塊非球面進行輔助優化。優化時選擇第四塊柱透鏡的第一個面和第五塊柱透鏡的第二個面作為非球面。且優化后,球面鏡和柱面鏡之間的間隔為63.682 4 mm,該間隔在方位向成像質量優化好的基礎上不可以再改動。非球面系數見表3。
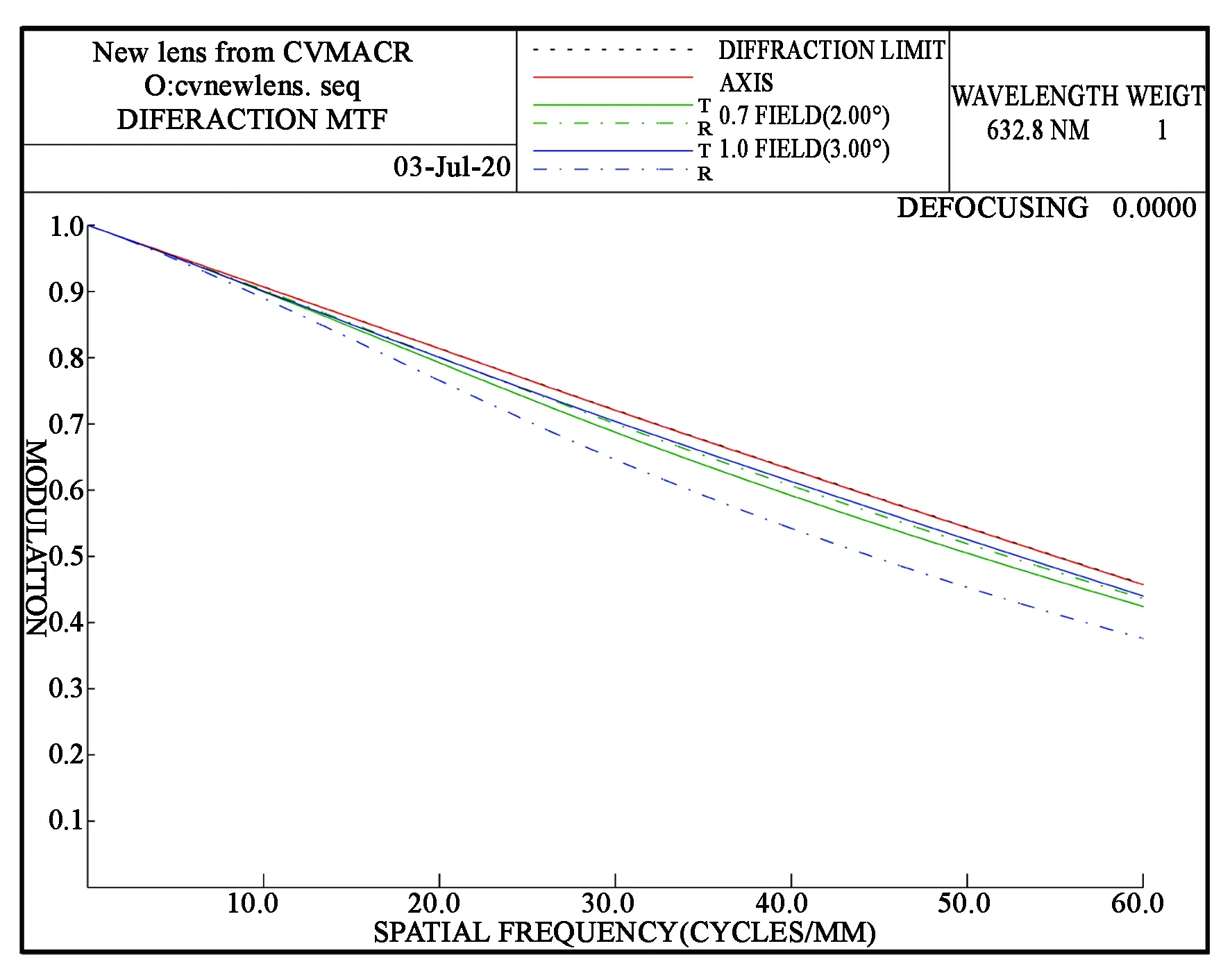
距離向即相當于物在球面鏡的前焦平面上,球面鏡和平行平板共同作用成像,只需要將方位向結構中柱透鏡部分曲率半徑設置為無限,非球面變為球面即可,其結果和MTF如圖7所示。
經過優化設計,已經得到較好的成像系統,該系統在不加光源的情況下總長約為1 400 mm,需要較大空間,不便于使用和機載,因此在空間上應該對其進行光路偏折,減少空間占用體積。反射鏡選擇放置在球面鏡關于光闌對稱位置。因為球面鏡之間的光線相對其他位置而言,主光線入射角度小,可以更好地控制反射鏡的角度。另外,球面鏡之間的距離較長,除了在光闌處進行濾波外,不進行任何操作,這一部分空間利用率不高,且占據大部分系統長度。綜合以上兩點,偏折光路的反射鏡以光闌為中心對稱放置,放置距離以透鏡之間上下不重疊為設置依據。本文設置為平面反射鏡距離光闌50 mm對稱放置,偏心角度均為45°。由傅里葉透鏡設計可知,主光線經過傅里葉透鏡作用后主光線平行于光軸,因此偏心角度設置為45°即可。但是對于方位焦平面,這樣偏折會影響成像質量,需要對方位向進一步優化,以提高成像質量。優化時還是只將原來的兩個非球面的非球面系數作為變量進行優化,但優化不能達到成像要求。因此考慮再加一片非球面進行優化。經過考慮,選擇第七塊柱透鏡的第二個表面作為非球面參與優化,優化約束條件仍然是球面鏡第一個面到像面之間的總長,優化后系統滿足成像要求。設計優化結果如圖8所示。3個面二次曲線系數見表4。

表3 非球面系數

(a)距離向結構(a)Structure of range
(b)距離向MTF(b)MTF of range圖7 距離向結構和MTFFig.7 Structure and MTF of range
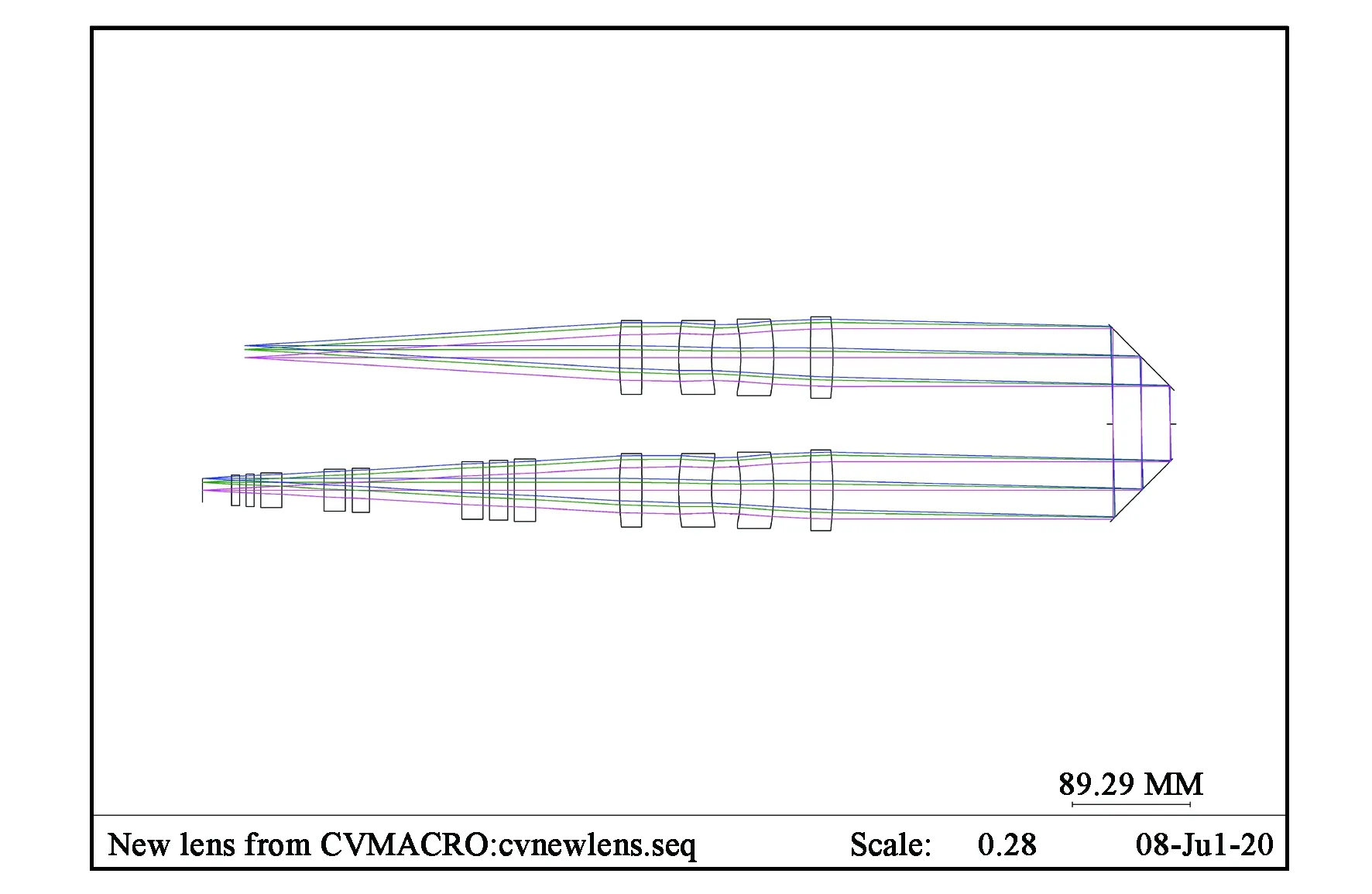
(a)距離向結構 (a)Structure of range
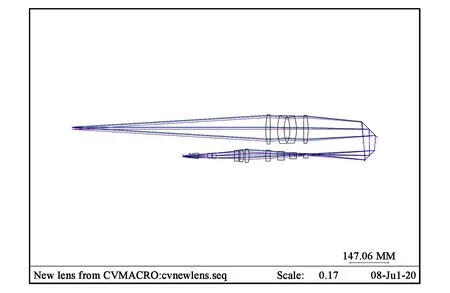
(b)方位向結構(b)Structure of azimuthal
(c)距離向MTF(c)MTF of range
(d)方位向MTF(d)MTF of azimuthal
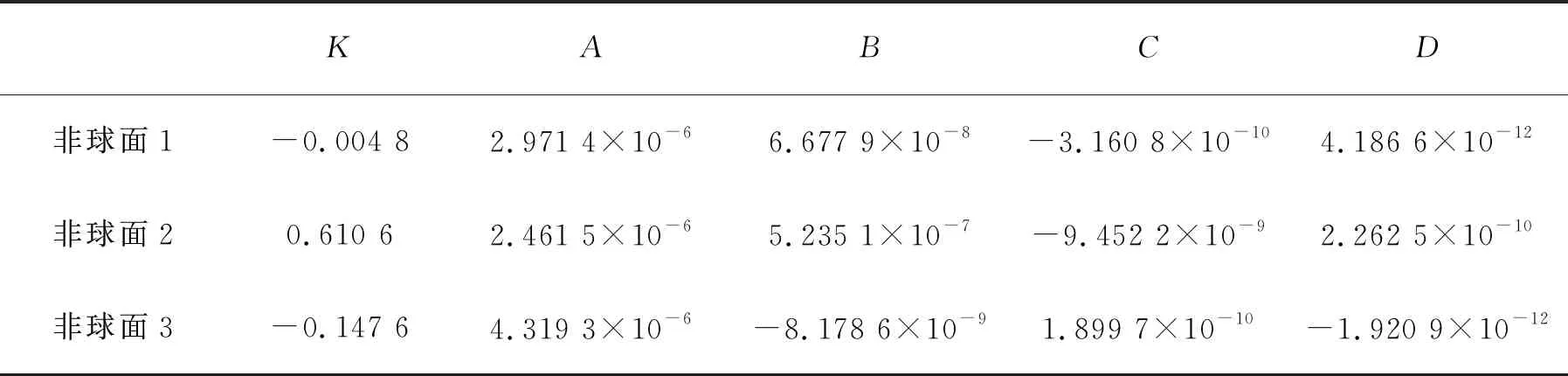
表4 非球面系數Tab.4 Coefficient of aspheric
優化后,系統的長度由規劃前的1 400 mm,變為700 mm左右,大大縮短了系統所占長度,有利于SAR成像系統機載使用。
3.4 傾角校正
令方位焦平面和SLM之間的夾角為β,由于望遠系統橫向和縱向放大率不同,具有校正傾斜平面的能力,但校正能力有限,不能將傾斜的平面完全校正到直立狀態,因此將SLM傾斜α°,此時,方位焦平面與垂直方向的夾角為βα,如圖9所示。
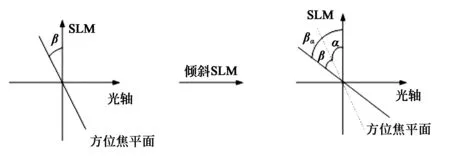
圖9 SLM傾斜示意圖Fig.9 Diagram of SLM
由于在方位向,望遠系統的橫向放大率為-1,縱向放大率為-1/k2,所以經過該望遠系統后,傾斜角會有改變,想要校正傾斜角重合,則應該使具有βα傾斜角的方位焦平面和具有α′傾角的SLM的像面重合,且由于球面鏡部分放大率為1,則α=α′。由圖8的幾何關系可知βα和α′的關系為:
(3)
(4)
根據式(3)、(4)、(5)可知:
(5)
帶入SAR相關參數,求得α=0.011 37″,此時傾角非常小,對像質不會產生很大影響。
4 像質分析
4.1 波像差
一個完善成像的光學系統可以實現點物成點像,物像對應的均為球面波。而一個有像差的系統的實際波面和理想球面波之間存在差異,這個差異就是波像差。當光學系統最大波像差低于1/4波長時,就可以說該系統是完善成像系統。在系統設計中,波像差(系統設計的殘差)會直接影響系統的裝調和測試,因此一個好的光學系統還必須要對波像差嚴格控制。優化后系統波像差如圖10所示。
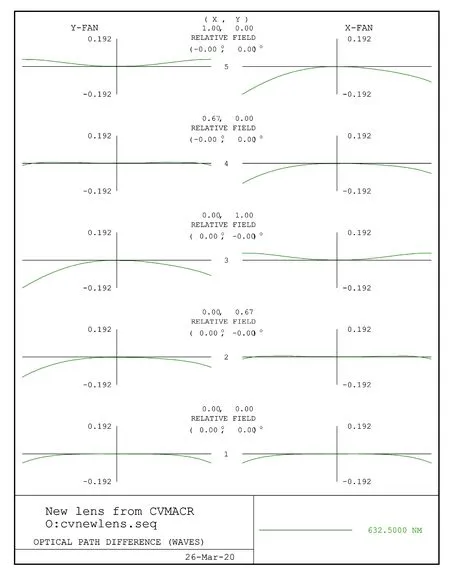
(a)距離向波像差(a)Wave aberration of range
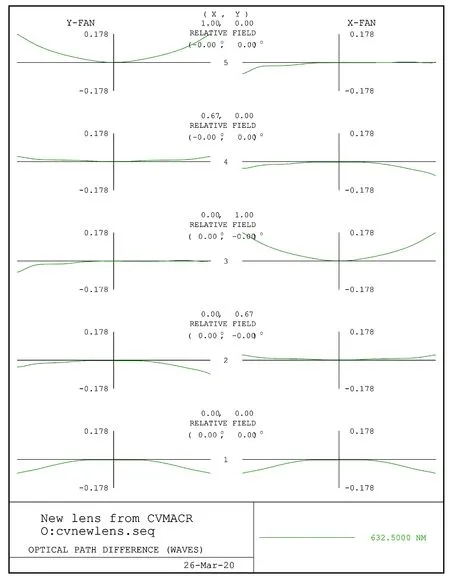
(b)方位向波像差(b)Wave aberration of azimuthal圖10 波像差Fig.10 Wave aberration
由圖10可以看出,距離向和方位向波像差均小于1/4波長,其中距離向波像差小于0.192波長,方位向小于0.175波長,則可視該系統成完善像,滿足設計使用要求。
4.2 公差分析
SAR數據實時成像光學處理器公差主要考慮技術指標要求以及現加工能力,選擇在60 lp/mm空間頻率處,以允許的MTF下降量為準則來制定光學系統公差。系統公差分析圖如圖11所示。
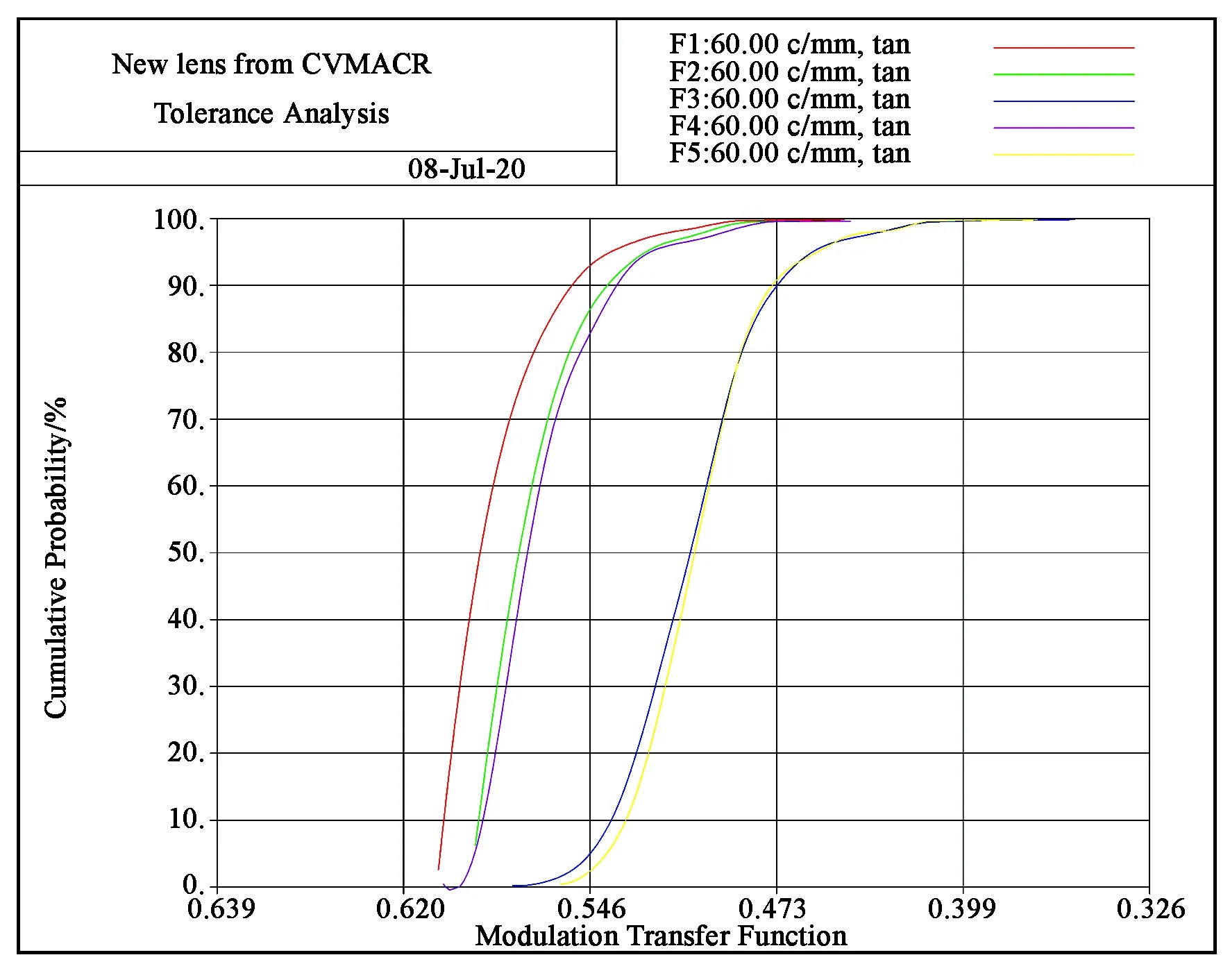
(a)距離向公差(a)Tolerance of distance
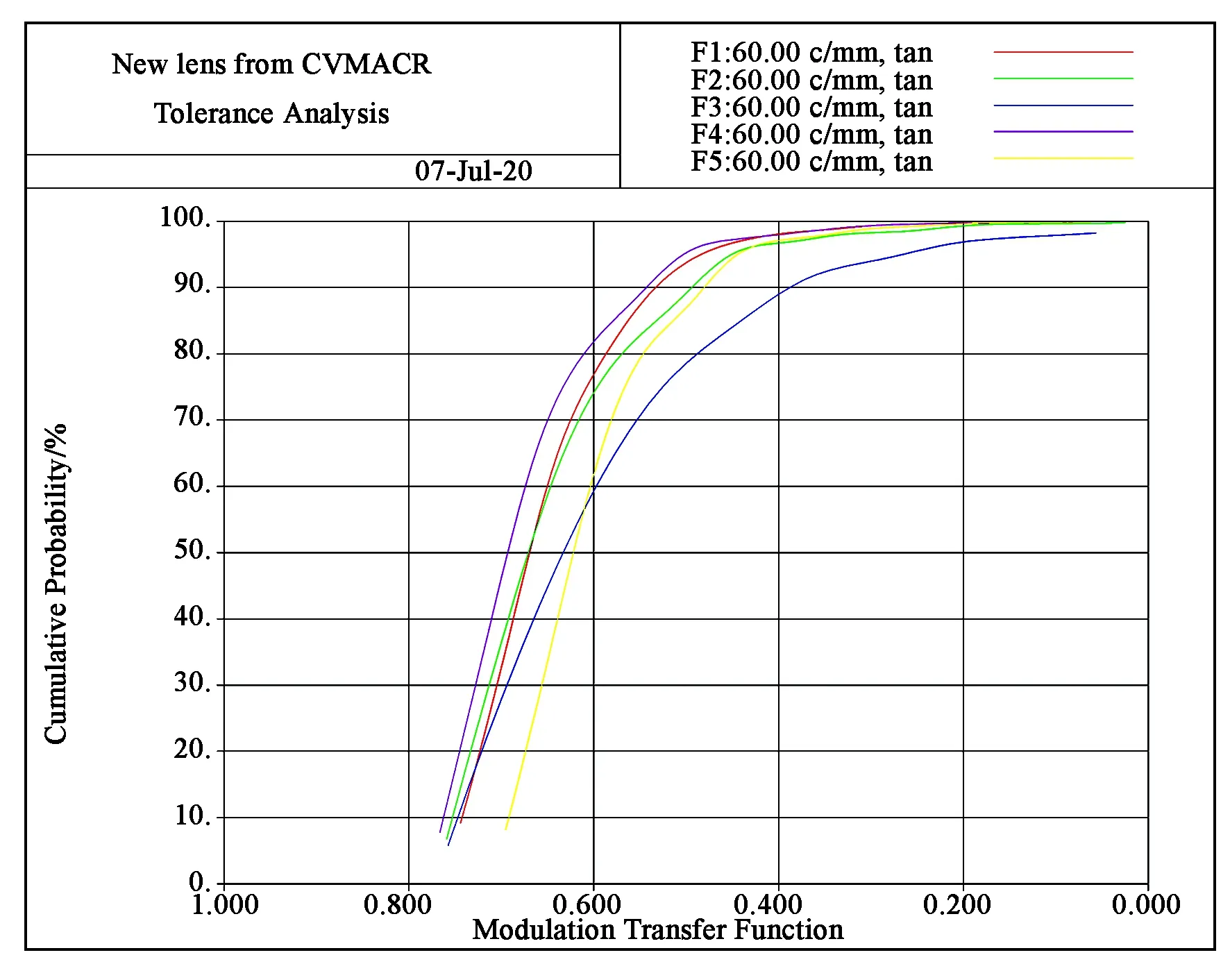
(b) 方位向公差(b)Tolerance of azimuth
由公差分析圖的結果可知,距離向和方位向在截止頻率處,都有超過90%的概率裝調到MTF大于0.4以上,滿足裝調要求。
4.3 非球面加工可行性分析
非球面相對于球面鏡來說,加工難度相對較大,而非球面度可以較為直接地體現非球面加工的可行性。在code V中利用加工數據表設置非球面最大高度計算非球面的非球面度。系統中3個非球面的非球面度部分結果見表5所示。
由表5的非球面度可知,3個非球面的非球面度均小于9 μm,且非球面系數也較小,具有實際加工的可行性。
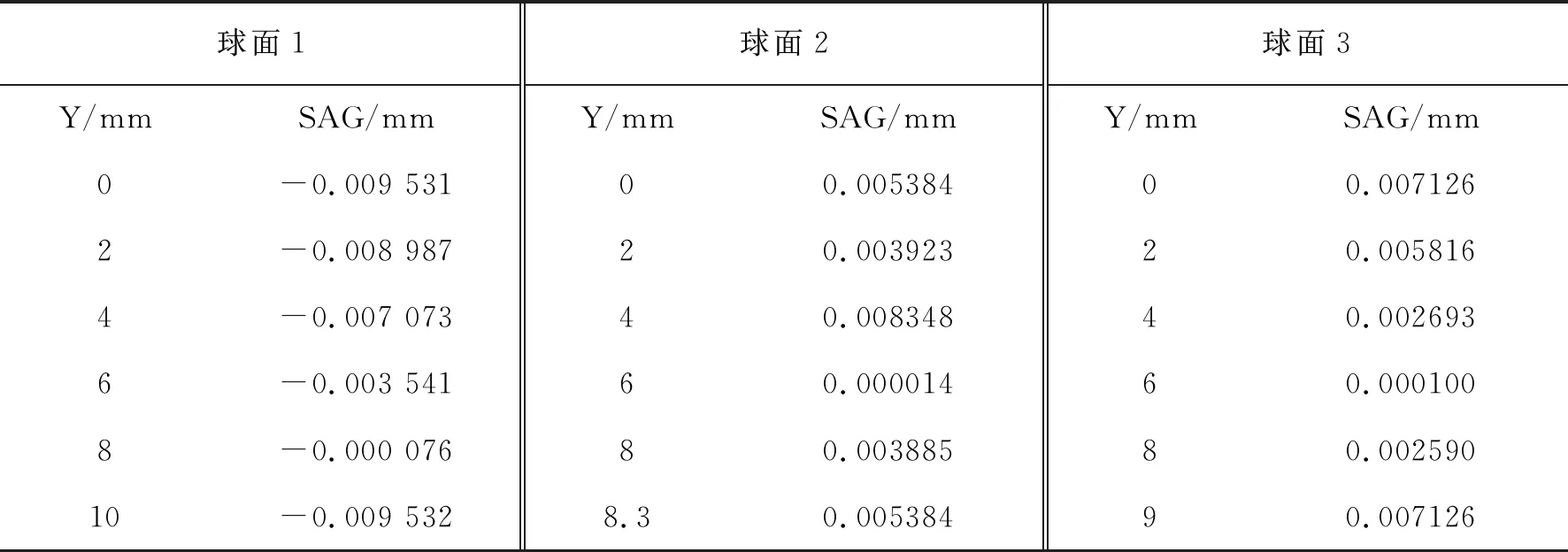
表5 非球面度Tab.5 Results of asphericity
5 結 論
針對現在SAR實時成像的需求,在利用先進光學元件的基礎上,設計了SAR數據實時成像光學處理器。本文在傾斜面光學處理器中應用SLM作為SAR數據的輸入,真正意義上實現了光學處理器并行處理和實時處理的能力。由于SLM的體積也小于傳統的膠片,系統在一定程度上變得輕巧。成像速度近似等于SLM的轉化信息的速度。同時對系統進行了規劃,將系統的長度從1 400 mm縮減到700 mm左右,有利于實現星載或機載使用,且系統成像質量較好,系統MTF在截止頻率內大于0.4,波像差小于1/4波長。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
