基于圖像處理的導彈發(fā)動機點火時間測量
2020-11-05 02:42:48初善勇焦志剛呂慎川
兵器裝備工程學報 2020年10期
關鍵詞:發(fā)動機
初善勇,焦志剛,呂慎川
(沈陽理工大學裝備工程學院, 沈陽 110159)
反坦克導彈由于操作靈活、破甲威力大、打擊精度高等特點,成為各國單兵反坦克武器的主體,其推進裝置由起飛發(fā)動機和增速發(fā)動機組成,發(fā)射時起飛發(fā)動機點火,將彈丸以較低速度推出發(fā)射筒,當彈丸飛行一定距離后,增速發(fā)動機點火使彈丸高速飛向目標[1]。在反坦克導彈的設計和測試過程中,增速發(fā)動機的點火時間是影響導彈制導和飛行姿態(tài)的重要參數(shù),如何準確確定增速發(fā)動機點火時間,是反坦克導彈設計和測試的關鍵問題。
增速發(fā)動機的點火時間可以通過判斷彈丸加速度轉變進行確定,因此需要對彈丸的速度進行實時測量。目前彈丸測速的主要方法有金屬網靶測速、錫箔靶測速、天幕靶測速、多普勒雷達、高速攝影等[2-3],金屬網靶和錫箔靶測速法在測量時需要頻繁更換靶紙,操作復雜、效率過低,已經很少采用。目前大多數(shù)測速方法為非接觸測速,岳宇辰[4]、丁毅[5]等通過在炮口安裝兩個感應線圈,采集兩個感應線圈的相位差來進行測速;李盼菲[6]、褚凌越[7]等討論了天幕靶彈丸測速中的方法和適用性;劉華寧[8]、劉澤慶[9]、湯雪志[10]等利用高速攝影測量了彈丸的飛行速度。
上述方法對彈丸飛行速度的測量均為某一區(qū)間內平均速度,對于彈丸實時飛行速度的測量并未涉及,無法對導彈點火時間進行確定。高速攝影作為一種新興的技術其具有便攜、操作簡單、數(shù)據(jù)可靠性高和可視性,被用于各行各業(yè)的多個方面。本文采用高速攝影測量與Matlab圖像處理結合的方法,根據(jù)處理后的圖像得出速度-時間曲線,從而確定出增速發(fā)動機點火時間。
1 試驗方案
試驗場地布置如圖1所示,圖中P為Phantom 高速攝影機、M為圖像采集服務器、N為反坦克導彈發(fā)射架。由于試驗在野外進行,因此還需準備發(fā)電機對高速攝影和圖像采集服務器進行供電。為保證拍攝時的安全性,高速攝像機距離射擊面的垂直距離應在20 m以上,且要保證拍攝范圍覆蓋導彈發(fā)動機兩次點火間的飛行距離,為此采用焦距為70 mm的攝像機鏡頭進行拍攝。通過調節(jié)攝影機云臺的方向和高度,使反坦克導彈發(fā)射架的炮口放位于視場的最左邊面,保證彈丸在出炮口后,兩次發(fā)動機點火均在視場范圍內。
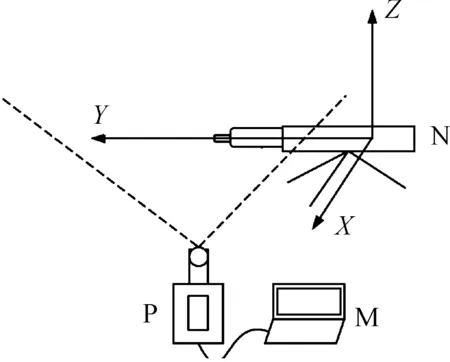
圖1 試驗場地布置示意圖
根據(jù)當時現(xiàn)場條件調整高速攝影參數(shù),參數(shù)設置為:光圈F=2.8;圖像分辨率為1280×720;曝光時間t=10 μs;圖像拍攝速率為每秒6 000幀,拍攝時長為觸發(fā)后的4.5 s,由于拍攝時間短,為保證導彈發(fā)射和攝像機工作的同步性,采用對講機時時通訊的手段進行全局協(xié)調,并保證發(fā)射過程的安全性。
2 圖像處理
在采集圖像的過程中,試驗場地的場景、工作人員等多余信息會拍攝入素材之中,因此對圖像進行識別特征點時誤差會較大,無法準確識別出有用信息,因此在做數(shù)據(jù)處理前要將圖像進行處理,分為預處理和二值化處理兩部分。
2.1 預處理和二值化處理
圖像素材預處理是去除圖像素材中的多余信息,只保留反坦克導彈飛行彈道的部分,可以減少數(shù)據(jù)的運算量、提高精確性。
根據(jù)試驗場地的情況,將圖像進行裁剪,只保留炮口和導彈飛行軌跡部分,再將裁剪后的圖像用雙邊濾波算法進行濾波降噪處理,提高圖像的清晰度。預處理后的圖像如圖2所示,提高圖片清晰度,并且裁去除彈丸外的其他外部信息。

圖2 預處理后圖像
為了方便提取彈丸圖像信息、突出彈丸輪廓、減少圖像數(shù)據(jù)量,需要對圖像進行二值化處理。二值化處理是根據(jù)閾值設置圖像中的像素點的灰度值,將圖像中特定物體設置為白色,其余背景設置為黑色[11]。對于最佳閾值的確定有多種方法,例如Huang閾值分割法、InterModes閾值分割法、Otsu最大類間方差法等,這些方法各有優(yōu)缺點。對比幾種方法,Otsu最大類間方差法具有計算簡單、識別準確、不受亮度和對比度的影響等特點,能更好地突出特定目標的輪廓,滿足本次計算要求。
利用Otsu最大類間方差法,根據(jù)圖像的灰度特性,將圖像分為前景和背景兩個部分,當取最佳閾值時,兩部分的類間方差應為最大值。通過Otsu最大類間方差計算閾值:
(1)
式中:mG為全局均值(整個圖像的平均灰度);Pi(k)為第i個灰度集合發(fā)生的概率;m(k)為第i個集合中的平均灰度。
確定拍攝圖像素材的全局平均灰度mG、每個集合的平均灰度m(k)和每個集合所發(fā)生的概率Pi(k),k在圖像中所有可能的灰度級數(shù)[0,L-1]取值,將整個灰度級數(shù)分為兩個集合,把各參數(shù)代入式(1)中,分別計算出每個k值所對應的類間方差,其中最大類間方差所對應的k值為最佳閾值。如果閾值不唯一,那么最佳的閾值為所有最佳閾值的平均值[12]。
通過Matlab中的工具箱graythresh函數(shù)計算出圖像素材灰度的最佳閾值為86,根據(jù)最佳閾值將圖像進行二值化處理,所有灰度大于或等于閾值的像素被判定為屬于特定物體,其灰度值為255表示,否則這些像素點被排除在物體區(qū)域以外,灰度值為0,表示背景或者例外的物體區(qū)域,也將整個圖像轉換為黑白圖像。在圖像二值化處理中,Matlab二值化處理代碼如下:
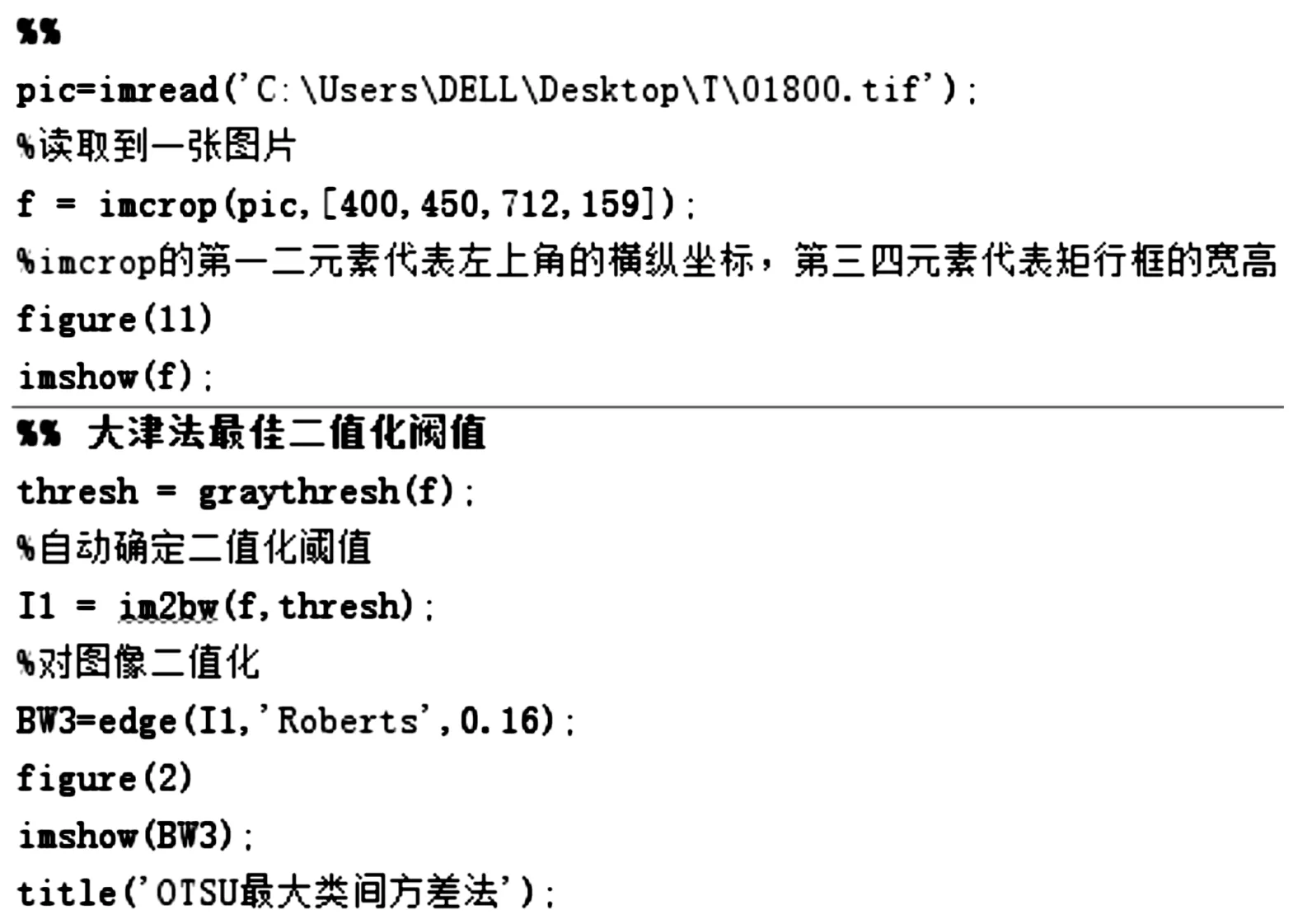
處理后的圖像如圖3所示。

圖3 二值化圖像
2.2 特征點的選取
在數(shù)據(jù)處理時,需要通過兩點的像素點坐標,計算出每副圖片中特征點到固定點的距離。選擇導彈的長桿頭部頂點為特征點,炮口位置為固定點,在發(fā)射時炮口保持靜止不動,根據(jù)圖像選取(662,139)坐標作為固定點。彈丸飛行過程中,導彈的長桿頭部頂點為運動的像素點,在圖像中利用for循環(huán)語句全局從左至右,從上至下搜索第一個灰度值為255的像素點,確定特征點像素點的位置坐標為(i1,j1),拍攝素材僅為飛行軌跡的小部分,假定導彈在同一平面內飛行,忽略其垂直于該平面的橫向位移,僅將像素點通過縮放轉化矩陣,將像素點坐標轉換為實際地面坐標。轉換矩陣如下所示:
D1=D·Ms=
(2)
式中:xi、yi、zi為第i點像素點坐標;Sx、Sy、Sz為坐標x、y、z方向的縮放系數(shù)。
將每張素材按照上述過程進行處理,得出彈丸飛行時的實時速度曲線,流程如圖4所示。
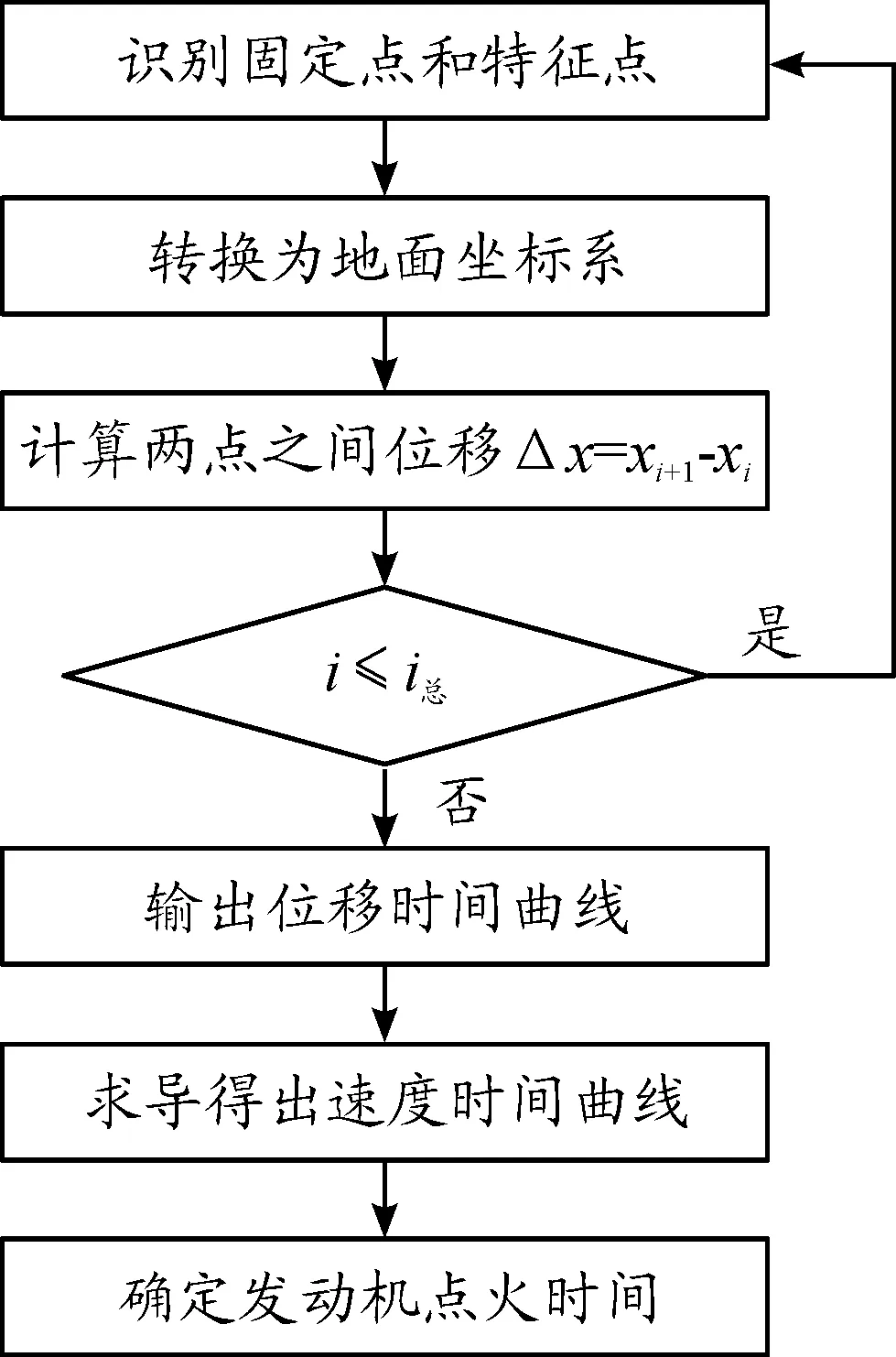
圖4 圖像處理流程框圖
3 數(shù)據(jù)處理
根據(jù)圖4將所有圖像素材進行處理,輸出彈丸飛行時位移曲線如圖5。
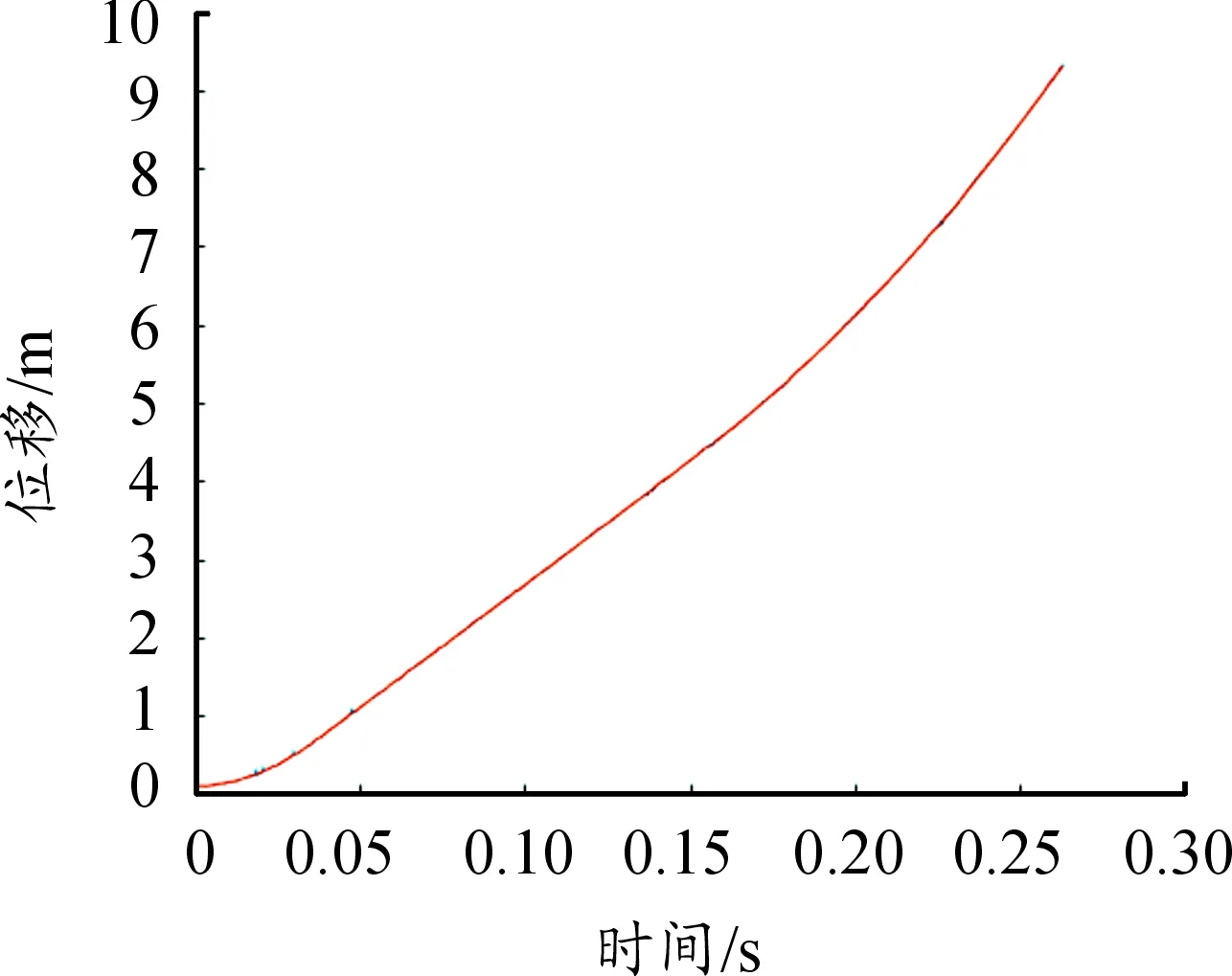
圖5 彈丸位移曲線
由圖5中可以看出位移的斜率隨著時間變化的不明顯,不能準確判斷點火時間點,為了更精確地識別增速發(fā)動機點火時間,需要通過速度的拐點來判斷導彈發(fā)動機點火時間。
導彈增速發(fā)動機點火時,加速度會迅速增大,速度曲線的斜率發(fā)生改變,根據(jù)速度拐點能更精確確定增速發(fā)動機的點火時間,根據(jù)式(3)求出每兩幅圖像之間的平均速度。
(3)
式中:f(ti+1)為第i+1張素材彈丸運動的位移;f(ti)為第i張素材彈丸運動的位移;ti+1為第i+1張素材對應的時刻;ti為第i張素材對應的時刻。
得出速度曲線如圖6所示。
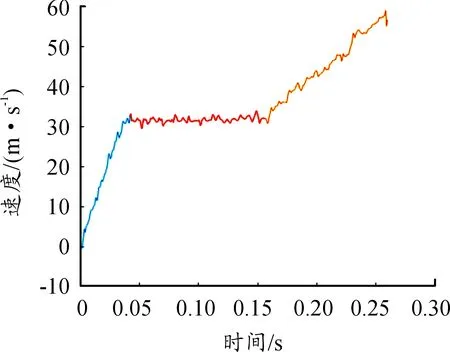
圖6 速度曲線
由圖6可以看出圖像噪聲太大無法準確判斷導彈發(fā)動機點火時刻點,因此將圖像進行擬合處理,彈丸在運動時經歷了3個階段,如果只采用一種多項式函數(shù)進行擬合,難以取得較為精確的擬合精度和效果,因此對速度圖像分為三段分別進行擬合。擬合后的三段方程為:
y1=-2.3×105x3+8.2×103x2+8.3×102x-0.1
y2=6.9x+31.94
y3=6.8×103x3-4.2×103x2+1.1×103x-59.77
由三段方程繪制速度擬合曲線,如圖7所示。由圖7可以看出,速度第二次突變點的時間為0.156 3 s,即為導彈增速發(fā)動機的點火時間。
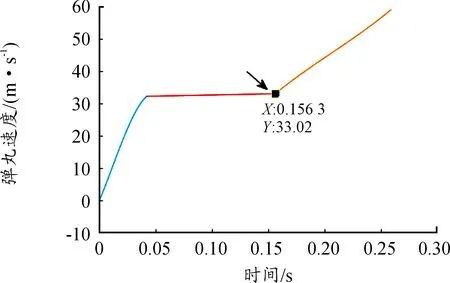
圖7 速度擬合曲線
4 結果分析
多普勒測速雷達利用多普勒原理對運動物體進行連續(xù)測速。如圖8所示,其原理是根據(jù)電磁波的傳遞進行連續(xù)測速,通過雷達發(fā)射電磁波使運動中的彈丸發(fā)生電磁感應,在高速旋轉的彈體上產生電動勢,從而產生感應電流,形成新的電磁波場。雷達會接收彈體電磁場產生的電磁波。在這個過程中,若彈丸與原高頻電磁波的源有相對運動,反射回的電磁波的頻率就會發(fā)生變化。這種由于相對運動引起的頻率變化,稱為“多普勒效應”[13]。
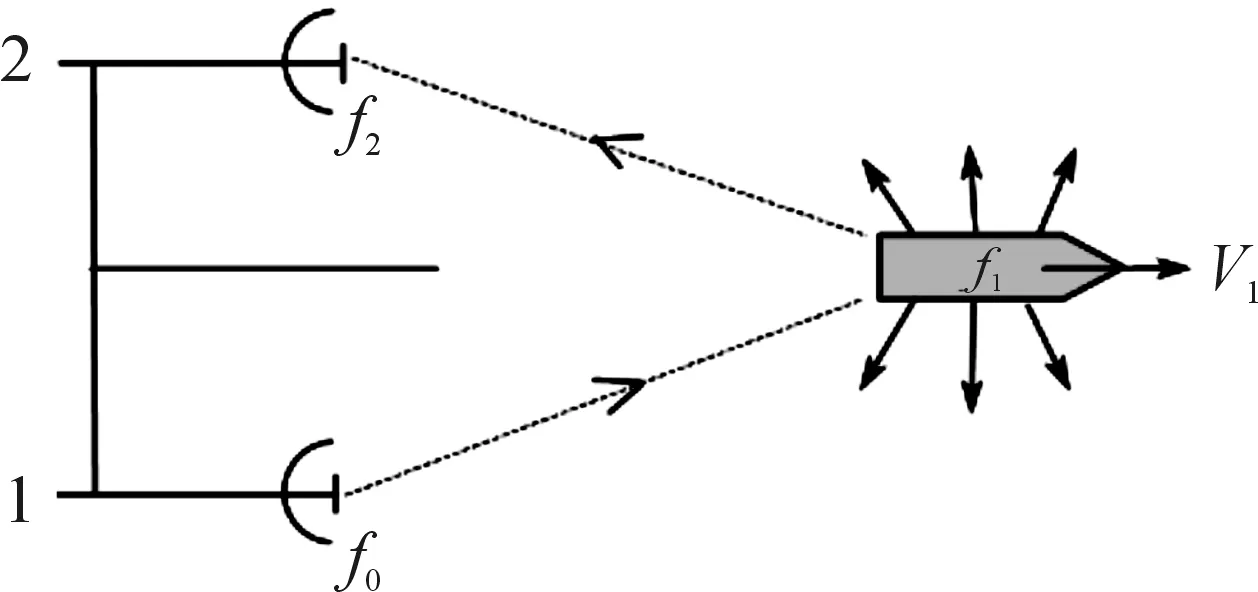
圖8 多普勒雷達原理示意圖
根據(jù)多普勒雷達測速原理測速公式可得:
(4)
式中:V1為彈丸的速度;f0為發(fā)射天線發(fā)射出的頻率;f2為接受天線接收到的頻率;λ0為電磁波的波長。
根據(jù)上述公式就能通過多普勒雷達采集到的電磁波頻率得出彈丸速度。
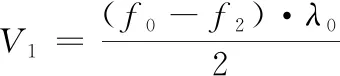
分別采用上述兩種方法進行測速試驗,共發(fā)射3枚反坦克導彈,兩種方式得出的試驗結果如表1、表2所示。
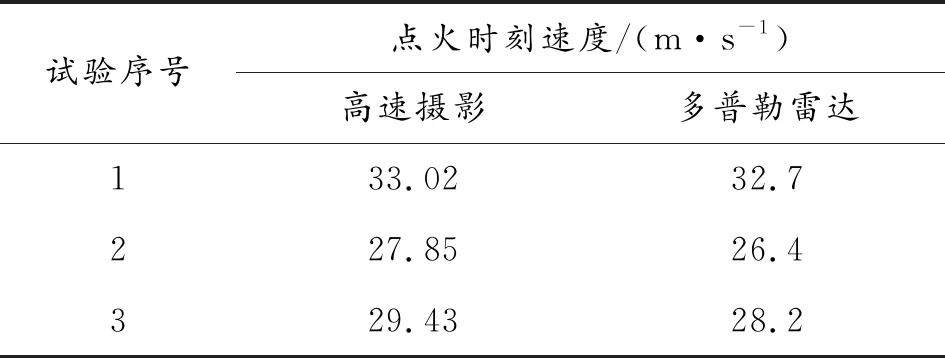
表1 點火時刻速度試驗
表2 點火時間試驗
由表中可以看出,通過高速攝影與Matlab結合的方法測出的增速發(fā)動機點火時間和彈丸速度,與多普勒雷達得出的結果基本吻合,且精度與多普勒雷達相當。
多普勒雷達價格昂貴、操作復雜、不具有便攜性,相比較而言高速攝影測速方法操作簡單、具有便攜性和可視性,在彈丸飛行時不僅可以測量彈丸速度還可以對彈丸的姿態(tài)進行監(jiān)控,為研發(fā)和試驗提供有價值的參考依據(jù)。
5 結論
提出一種高速攝影與Matlab圖像處理結合的某型號反坦克導彈發(fā)動機點火時間測量方法,利用高速攝影機拍攝出反坦克導彈飛行時的圖像素材,在Matlab中對圖像進行預處理和二值化處理,選取圖像中特征點坐標和固定點坐標,計算出彈丸運動時的位移和速度,得出速度-時間曲線,通過曲線中彈丸速度的轉變點,確定增速發(fā)動機點火時間。
將得出結果與多普勒雷達測速數(shù)據(jù)進行對比,驗證此方法的可行性和精確性,同時此種方法可以降低成本,并能得到導彈飛行姿態(tài),為研究人員對反坦克導彈設計和測試提供參考依據(jù)。
猜你喜歡
汽車維修與保養(yǎng)(2021年8期)2021-02-16 00:28:30
汽車維修與保養(yǎng)(2021年8期)2021-02-16 00:28:18
汽車維修與保養(yǎng)(2020年11期)2020-06-09 05:42:06
民用飛機設計與研究(2019年2期)2019-08-05 01:33:40
汽車維護與修理(2016年3期)2016-02-28 13:16:54
汽車維修與保養(yǎng)(2015年1期)2015-04-17 03:25:30
汽車與新動力(2015年1期)2015-02-27 12:11:01
汽車與新動力(2014年6期)2014-02-27 12:10:49
汽車與新動力(2014年5期)2014-02-27 12:10:41
汽車與新動力(2014年2期)2014-02-27 12:10:15