中央空調管道清潔機器人機構設計與結構分析
2020-11-02 07:46:54朱金金
湖北農機化 2020年17期
朱金金
(南通理工學院,江蘇 南通 226000)
1 中央空調管道清潔機器人設計的需求
1.1 具有靈活的結構特點
事實上,在不同的行業領域中所采用的中央空調管道系統型號并不相同,且空調內的管道系統結構也不相同。因此,所設計出的管道清潔機器人要具有較為靈活的結構特點,滿足各種上下左右的移動要求。
1.2 具有較高的清洗清掃功能
中央空調管道具有大、數量多等特點,因此在管道內所滯留存在的不僅僅是體積質量較大的灰塵,還可能出現動物尸體等。因此,管道清洗機器人要具有強大的清洗清掃能力,能夠滿足各種清洗標準,甚至在綠色生活理念下,管道清潔機器人還需要擁有一些附加的功能。
2 中央空調管道清潔機器人機構設計與結構分析
2.1 中央空調管道清潔機器人系統分析
中央空調管道清潔機器人的機構性能設計歸根結底是為了清潔管道而服務的,因此在設計中央空調管道清潔機器人之前,需要展開對空調管道裝置系統的分析。不同類型大小的中央空調管道系統組成是不同的,因此所采用的清洗方案也是不同的。當前要想設計出一款具有普適性的中央空調管道清潔機器人,需要展開對管道系統結構的分析。基于對管道系統裝置的分析,本文所分析的管道清潔機器人其工作的整體情況如下所示:①清潔機器人要進入到空調管道中進行管道內部環境的檢查,因此,需要配備行走機構,滿足空調管道上下左右前后的行走,在系統中還需要配備視頻傳感器,將管道內部環境衛生情況上報控制系統,制定清洗方案。②展開對管道的清掃。清掃過程中不可避免地導致灰塵四處散落,因此需要利用氣囊將空調風口堵住,確保室內環境質量,之后驅動清洗機器人的清掃模塊,完成對風管內壁的清洗,利用集層凈化器吸收風管內的病菌等。最后,再利用傳感器展開風管內壁清洗效果的監督判斷。③恢復風口和工作區域。可以說采取管道清洗機器人具有巨大的優勢和特點,如:能夠實現控制的可視化,制定好清掃的檔案資料,便于展開對中央空調系統的質量控制管理。
2.2 中央空調管道清潔機器人的各個機構設計分析
2.2.1 控制系統設計分析
控制系統是確保清洗機器人做好行走、清掃工作的重要環節。基于電氣自動化技術的發展,空調管道系統的清洗機器人控制系統主要由視覺觀測模塊和清洗裝置模塊2個部分組成。其中,清洗裝置系統同行走系統結合在一起,需要完成驅動、升降、轉向以及清洗作業,而視覺觀測系統則需要將空調管道內部的圖像信息、圖片拍攝傳輸到電腦系統中,由工作人員根據觀測到的圖像信息對清洗裝置展開控制。在控制系統中的電機控制驅動模塊主要是由步進電機驅動和直流電機驅動2個子系統組成,采用分組控制的方式,分別控制速度和運轉方向,如此很大程度地提升了清洗機器人的行走機構和清掃機構的協調運作效率。
2.2.2 行走機構設計分析
行走機構設計需要滿足各種特殊的空調管道的清洗需求。如:對于豎直管道的清洗,對于管道內有障礙物情況下的行走。在本設計中主要采用中心兌成的腿足型行走機構,具體如圖1所示。該行走機構主要由電機座、滑軌、電磁鐵腳等組成。工作原理是由電機驅動輪組帶動曲柄連桿機構推動滑塊在滑軌上實現往復運動,同時利用磁鐵腳的吸附作用,當齒輪齒條傳動時,則磁鐵被推出,吸附在管道壁上,當需要移動時,就給電磁鐵通電,取消吸附力。根據實際的清洗需求可知,該清洗機器人的行走機構需要滿足爬坡、轉向、升降以及越障等功能作用,以下對不同功能參數展開設計分析。爬坡,最大坡度為60°;轉向,最大轉彎角度為90°,且轉彎半徑可以為60mm;升降,最大高度可以達到300mm,最小高度為200mm,且管道截面尺寸高度隨機處理;越障,最大高度尺寸為90mm。
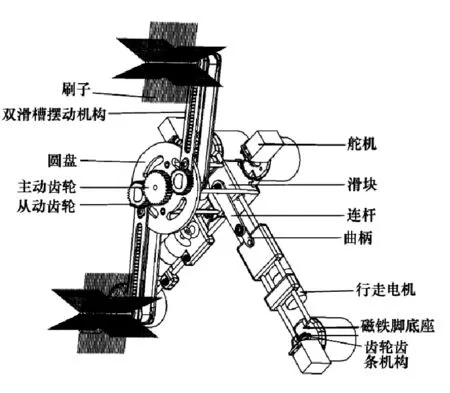
圖1 清洗機器人的行走整體結構
驅動機構的設計分析。驅動機構為清潔機器人的行走提供動力,其是推動其前進的重要動力,同時驅動機構還具有靈活性,能夠隨著管道內部裝置結構形狀而作出改變。常見的驅動方式為履帶式、螺輪式、腳足式等,本文采用的正是腳足式驅動機構,該方式具有適應能力強,越障能力強,對粗糙管道適應性較強,且具有較高的承載能力。
導向機構設計。清洗機器人的行走模塊中必須具有導向功能,只有如此,才能夠在各種矩形管道中,豎直管道中進行管道的整體清潔。常見的導向機構有差速式導向,由2個獨立的驅動電機控制,本設計正是采用這種驅動導向機構,其設計方案圖2所示。

圖2 清洗機器人的電磁導向機構設計原理
升降機構設計分析。常見的清洗機器人升降機構可以分為連桿結構和伸縮桿結構,本次設計所采用的連桿結構可以實現豎向方向和水平方向的轉變,是一種自適應力極強的機構,且整體機構大小符合管道內的最小尺寸需求。在升降機構設計中,實現借助solidworks軟件建立起連桿結構的模型,而后進行模型的仿真實驗。
2.2.3 清洗機構設計分析
清洗機構模塊是整個清潔機器人的重要組成部分,其決定著該機器人的工作效率,清洗有效性以及市場應用率和推廣價值。通過對行走機構的設計分析之后,已經初步解決清洗機器人在空調管道內部的工作路徑、工作方向,但是清洗方式則又需要對清洗下的雜質進行合理地回收,對各種頑固污漬進行全面清洗。因此,清洗機構需要具有清洗裝置和回收裝置。
清洗機構設計。清洗機構需要擁有清洗刷頭、刷柄以及吸塵管。清洗結構的驅動機構主要原理是擺動,通過對吸塵管和刷頭角度的控制,在一定時間內改變相對位置,完成對管道內部的全面清洗。因此,可以采用蛇骨結構,利用兩端固定節和蛇骨骨節,根據所需要的長度規格進行相鄰骨節的鉸接,如此只需拽動一側的金屬線,就可以實現角度變化彎曲。具體設計方案如圖3所示。
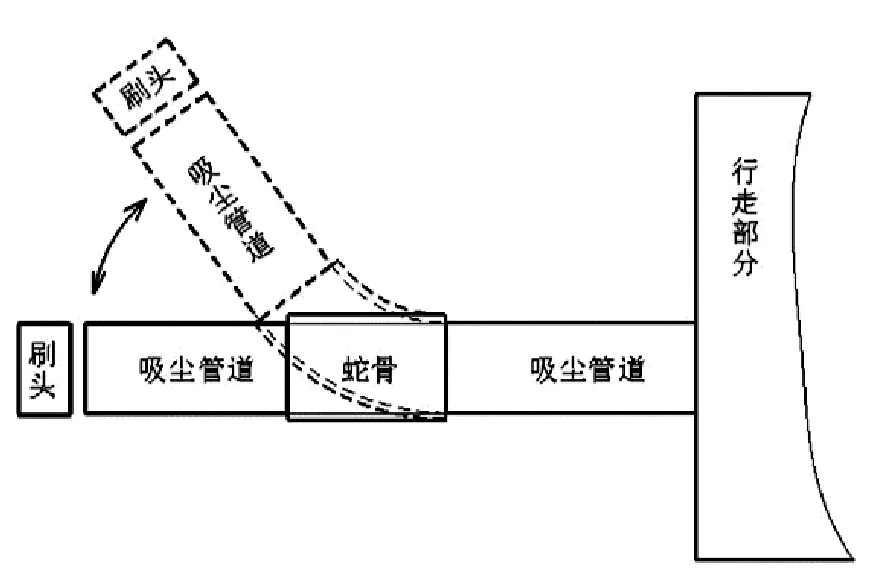
圖3 清洗機構的整體方案設計
回收機構設計。將管道內的雜質回收帶走是清洗機器人重要的工作內容,因此,需要設計回收機構,本清洗機器人主要是通過吸塵力效應來實現對灰塵等的回收。在本次設計中,通過建立模型的方式,對于所采用的吸塵管道的吸塵力變化參數的計算,基于該計算結果完成對吸塵口形狀設計。
3 結語
綜上所述,上述基于中央空調管道清潔的實際需求,完成對其機構和結構模塊設計應用,所設計制作而成的清潔機器人具有較高的工作效率,在未來的研究探索中,仍舊需要不斷地導入新的設計理念、設計思路進行管道清潔機器人的機構設計和結構的優化升級,為現代社會提供更加高質量、精細化的人工智能服務。
猜你喜歡
哲學評論(2021年2期)2021-08-22 01:53:34
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
中華詩詞(2019年7期)2019-11-25 01:43:04
電子制作(2018年18期)2018-11-14 01:48:24
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
山東工業技術(2016年15期)2016-12-01 05:31:22
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
現代企業(2015年9期)2015-02-28 18:56:50