基于無線電波干擾原理的變電站空中安防裝置研制
2020-10-26 06:51:50鄭躍斌
機電信息 2020年26期
關鍵詞:變電站
摘要:無人機非法入侵變電站對電網安全運行造成嚴重影響,輕則造成電網信息泄露,重則造成站內設備損壞,引起全網停電。為此,根據現有的反無人機技術,結合變電站特點,設計了一款基于無線電波干擾原理的變電站空中安防裝置,旨在加強變電站的空中安全防護,保障站內設備安全。
關鍵詞:變電站;空中安防;反無人機;無線電波干擾
0 引言
變電站在電力系統中占據著舉足輕重的地位,用于電力輸送和電力分配,故保障變電站內設備的正常運行對于電力系統來說尤為重要。隨著無人機技術的快速發展,無人機“黑飛”現象越來越多,對變電站的空中安防影響也日益凸顯,亟需研發出更加專業的設備或系統進行變電站的反無人機管控。曾有學者研究過“防止惡意無人機入侵電力巡檢區的管控方法”,通過設置無人機地理圍欄,對一些惡意入侵的無人機進行攔截,但這種方法實施起來具有一定難度,建立虛擬圍欄需要耗費巨大的基礎設施建設費用,而且無線電干擾容易影響變電站內GPS的正常使用。
為了解決非法入侵的無人機對變電站空中安防造成的不良影響,本文將設計一套既滿足變電站空中安防需求,又不影響變電站內設備GPS正常使用的空中安防裝置。
1 裝置總體設計
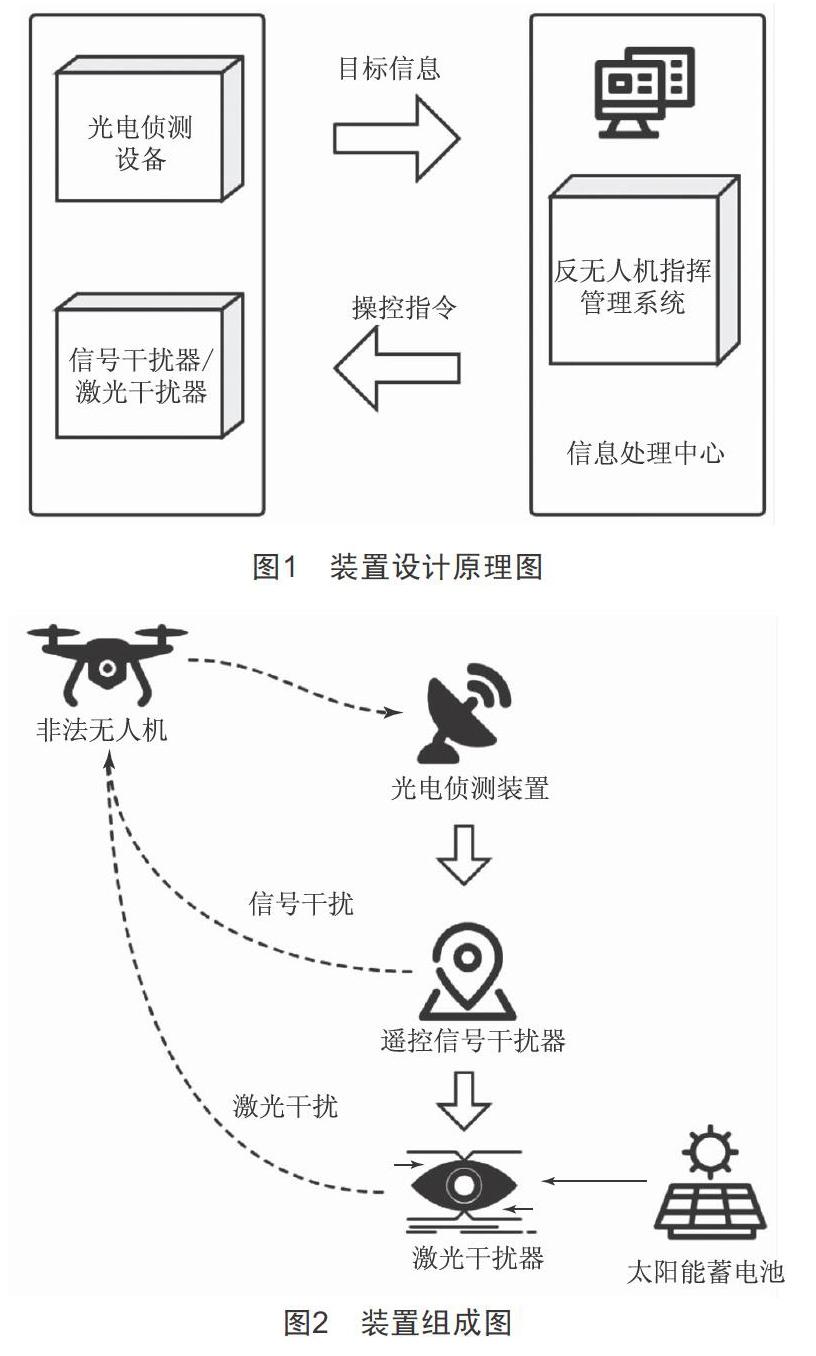
本文設計的空中安防裝置基于無線電波干擾原理,對非法入侵的無人機進行監控和干擾,有效防范無人機非法入侵。該裝置由光電偵測設備、云臺激光干擾器、遙控信號干擾器、太陽能供電系統和反無人機系統管理平臺組成。
該裝置的工作原理:首先,光電偵測設備對非法入侵的無人機進行監控;然后,監控設備將目標信息傳到反無人機系統,反無人機系統通過云臺激光干擾器實現360°全方位的光電定位與激光器干擾,影響入侵飛行器對電力設備重要保密系統的拍攝;同時,遙控信號干擾器對非法入侵的無人機進行圖傳信號干預和操控信號干預,切斷無人機與控制中心的數據連接或無線電通信,使其只能按照原先設置程序迫降或者返航,不讓其進入變電站空中區域,有效防范無人機的非法入侵。另外,本裝置配置的太陽能供電系統可實現對裝置的不間斷供電,保證了干擾設備的持續正常運行。
本文設計的變電站空中安防裝置的設計原理圖和裝置組成圖分別如圖1、圖2所示。
2 光電偵測設備
該裝置采用高精度的光電偵測監控攝像頭對非法入侵變電站的無人機進行探測。當偵測到有無人機進入變電站空中領域時,光電偵測監控攝像頭會自動對非法入侵的無人機進行跟蹤拍照或錄像取證,并將信息傳達到反無人機系統。
3 云臺激光干擾器
3.1 ? ?激光干擾功能
該裝置內設激光反光鏡,根據光電偵測設備反饋的數據,瞄準干擾目標,然后通過激光干擾器中的反光鏡發射激光光束,對非法入侵的無人機進行激光光束照射干擾,重點是干擾非法入侵無人機的拍攝功能,使得非法入侵的無人機無法對變電站內部設備進行拍攝。
激光干擾主要利用激光的優異特性,將它作為光源,配以相應的光電原件實現干擾。借助激光光束反射具有精度高、測量范圍大、檢測時間短、非接觸式等優點,采用反光鏡將激光光束進行反射,對入侵的無人機進行警示干擾。激光反光鏡的干擾屬于驅趕式干擾,并不是要摧毀擊落無人機,所以激光強度不能太大,避免無人機墜毀,對變電站中的重要設備產生二次干擾。
3.2 ? ?360°全方位云臺自動瞄準功能
激光干擾器下設計了全方位云臺,云臺主要由控制模塊、傳感器模塊、動力模塊、減振結構、支撐結構和連接結構組成。其中控制模塊主要是主控板,采用STM32處理器;傳感器模塊可讀取云臺末端姿態,再與光電偵測設備的姿態角比較,發出控制信號讓動力模塊及時進行動作修正,從而使裝在云臺上的干擾器等外部傳感器可以根據非法入侵的無人機位置進行360°旋轉并自動瞄準。傳感器模塊主要包括陀螺儀和加速度傳感器MPU6050,用于感應云臺末端姿態位置,并反饋給主控板。本功能保證了激光干擾器的順利運作。
4 遙控信號干擾器
目前消費級無人機常用的頻段主要為2.400~2.483 GHz、5.725~5.875 GHz。因此,遙控信號干擾器的測控鏈路干擾頻段覆蓋范圍至少包含2.400~2.483 GHz、5.725~5.875 GHz頻段。針對此電磁信號的頻段特性,遙控信號干擾器需設置2.4 GHz和5.8 GHz可選調節頻段,在保證不影響變電站內設備GPS信號正常發送的前提下,調節干擾頻道,實現對非法入侵的無人機進行定向壓制。
干擾遙控器模塊主要通過干擾無人機數據鏈路通信系統實現反制效果,包括兩大功能:一是干擾下行圖傳信號;二是干擾傳輸上行控制信號。
4.1 ? ?圖傳系統干預功能
為了重點保護變電站的保密系統,首先需要避免無人機通過偷拍的方式竊取變電站內的保密信息,而圖傳系統干預功能可通過擴展頻譜通信系統,干擾非法入侵的無人機的圖傳信號,使其無法回傳圖片,保障變電站保密信息安全。其主要原理是將待傳輸信息用擴頻編碼調制方式,將頻譜擴展后在寬帶寬信道中傳輸,接收端使用與發射端同步的擴頻碼解擴恢復原始數據。
4.2 ? ?操控信號干擾功能
本功能可根據無人機遙控信號的跳變,針對某一具體頻段進行干擾。干擾無人機與地面遙控器之間的上行和下行通信鏈路信號,對無人機的控制鏈路進行阻斷與管控,即可迫使無人機自動返航或原地降落,破壞地面控制者遙控無人機入侵受保護或受限制飛行區域的企圖。
5 太陽能供電系統
現有的大部分反無人機裝置采用市電供電與蓄電池逆變供電相配合的方式進行供電,但這種設計在沒有市電供電及蓄電池電力耗盡的情況下無法保障裝置正常運行。為此,該裝置配置了太陽能供電系統,可實現自主供電,不需要額外配備電源設備,節約了能源,且占用空間小,十分適合在變電站附近的環境中使用。
6 反無人機系統管理平臺
6.1 ? ?反無人機系統監控管理
對無人機的監控,可基于視覺開源庫完成目標物體識別。當光電偵測設備偵測到可疑物體闖入監控范圍內時,系統將識別并捕獲可疑物體的圖像信息,對視頻圖像先進行預處理,即灰度化濾波,再進行二值化、形態學運算和邊緣檢測,以達到圖像分割的目的,最后將檢測到的圖像經匹配分析確定為無人機后,發出報警信息或干擾指令。
6.2 ? ?反無人機系統數據處理
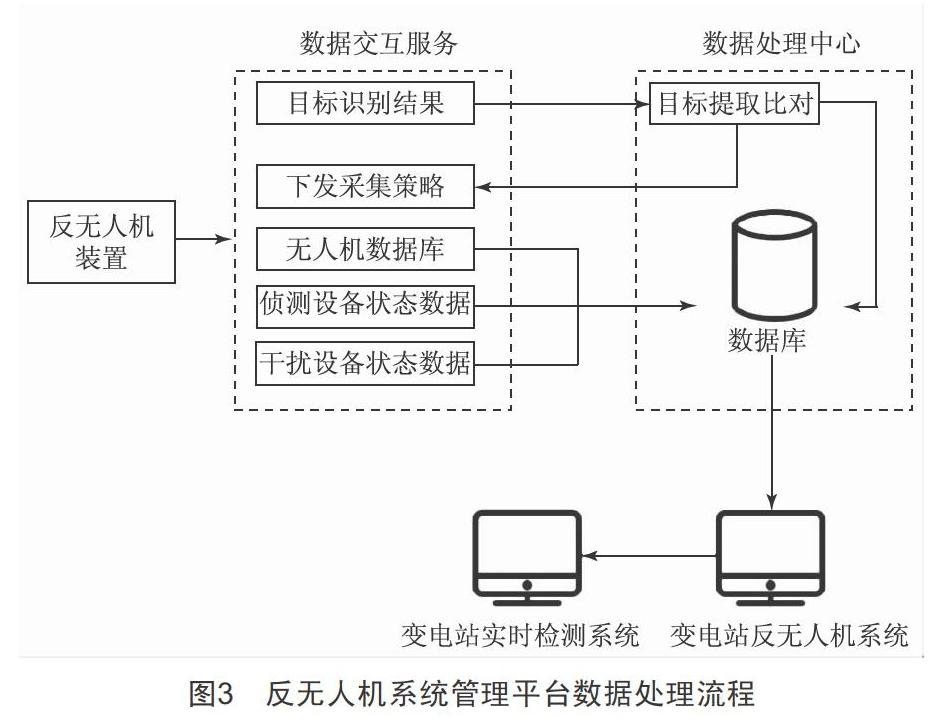
反無人機系統數據處理模塊可根據定位算法獲得的無人機目標位置信息,聯動干擾設備對無人機目標進行干擾,并在達到干擾時長后關閉干擾設備。同時,數據處理模塊可繼續進行目標識別和定位,并根據新的定位結果判斷干擾是否成功、是否需要繼續執行干擾等策略。
反無人機系統管理平臺數據處理流程如圖3所示。
7 結語
本文設計了一種由光電偵測設備、云臺激光干擾器、遙控信號干擾器、太陽能供電系統和反無人機系統管理平臺組成的變電站空中安防裝置,實現了對非法入侵變電站的無人機進行警示和干擾驅趕的目的,有效防范了無人機的非法入侵,為變電站內重要設備的安全運行保駕護航。
[參考文獻]
[1] 熊振偉,陳路.民用GPS自主式欺騙技術與應用[J].電子測試,2017(12):40-41.
[2] 胡洪濤,李正杰,蘭竹.基于衛星導航欺騙干擾的無人機誘捕技術[J].電子信息對抗技術,2020,35(2):48-52.
[3] 李光偉,費曉燕,劉彥明,等.頻譜探測技術在無人機探測與反制領域的應用[J].電子信息對抗技術,警察技術,2019(3):12-16.
[4] 方鵬,張晨波,張振,等.重要電力設施防止外來無人機管控系統研究[J].科技創新與應用,2019(35):41-44.
收稿日期:2020-08-30
作者簡介:鄭躍斌(1989—),男,廣東潮州人,工程師,從事變電運行工作。
猜你喜歡
電子制作(2019年10期)2019-06-17 11:44:56
電子制作(2018年8期)2018-06-26 06:43:34
電子制作(2017年8期)2017-06-05 09:36:15
電子制作(2017年24期)2017-02-02 07:14:44
現代工業經濟和信息化(2016年5期)2016-05-17 05:35:57
東北電力技術(2016年2期)2016-05-17 04:32:54
河南電力(2015年5期)2015-06-08 06:01:45
中國工程咨詢(2015年10期)2015-02-14 05:57:34
水電站機電技術(2014年1期)2014-09-26 11:59:53
中國機械(2014年15期)2014-04-29 00:09:45
