單腿多自由度下肢康復機器人設計
2020-10-21 06:33:17趙新宇艾雯張一諾
科技風 2020年6期
關鍵詞:人機工程學
趙新宇 艾雯 張一諾

摘?要:本文所提出的是一款下肢康復機器人,該產品可以輔助下肢肌力障礙患者進行康復訓練,以此來達到下肢肌力康復的目的,首先對下肢康復機器人的國內外研究現狀進行分析和研究,然后基于人體工程學,對人體下肢進行生物力學分析,最后運用感性工學對多自由度下肢康復機器人進行外觀設計。
關鍵詞:下肢康復機器人;人機工程學;感性工學
隨著我國人口老齡化階段的加速以及由于交通事故等外在因素的增多,下肢肌力障礙患者的人數也在急劇增加,因此,為老年人或其他肌力障礙患者提供性能優越的康復輔助器具已成為整個社會重點關注的問題之一。隨著經濟的發展,下肢康復輔具有著前所未有的發展前景。本文即從適老化和大健康角度來引入一款新型的下肢康復機器人,來幫助下肢肌力障礙患者進行下肢肌力的康復訓練,讓患者在未來更好的融入正常的日常生活中。
1 國內外下肢康復輔具研究現狀
近幾年來,我國國家康復輔具研究中心、清華大學、燕山大學等科研機構及高校、企業共同參與組織并承擔了諸多國家科技支撐計劃以及863計劃項目課題,例如燕山大學王洪波教授及其團隊所研發的坐臥式下肢康復機器人,具有兩條外骨骼機械腿,三個自由度,能實現多個康復訓練動作。國外的日本筑波大學山海嘉之教授所開發的HAL系列下肢運動輔助外骨骼,它采用了角度傳感器、肌電信號傳感器和地面接觸力傳感器等傳感設備來獲得外骨骼和操作者的狀態信息。
2 下肢生物力學及生理結構分析
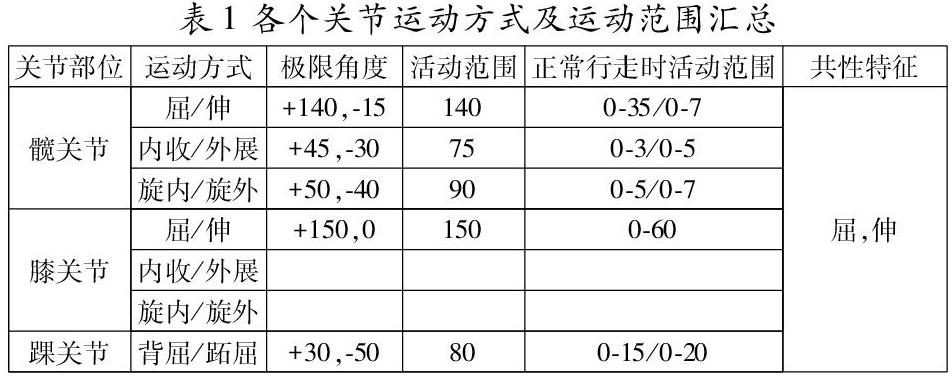
人體下肢的主要關節有三個,分別為髖關節、膝關節與踝關節,三個關節的協同合作會產生推動人體前進的效果,如表1所示為各個關節的運動方式及運動范圍。
3 基于感性工學的下肢康復機器人設計
3.1 樣本案例的篩選
通過新聞報道、康復醫療雜志、設計比賽以及網絡調研等渠道,收集大量的下肢康復醫療器具的圖片,共收集到樣本圖片120張,運用KJ法對120張樣本進行評估分析,將外觀形態相似的圖片進行分類及編號,最后分組預覽,得到最具有代表性的10個樣本案例。
3.2 感性意象詞匯的收集與篩選
通過網絡期刊、文獻、和實地訪談等方式,從形態、色彩和材質三個方面,搜集可以描述輪椅特征的感性意象詞匯,剔除重復的詞匯,建立感性意象詞匯庫。最終確定了6對感性意象詞匯對。
3.3 語義差異法的應用及數據分析
建立五階語義差異量表,將篩選出來的10個樣本案例與6對感性意象詞匯對組成調查問卷,讓受測者對每個樣本案例的每一對感性意象詞匯進行評價,從左至右依次為-2,-1,0,1,2五種程度。再根據調查問卷所獲得的反饋結果,對樣本案例的得分評價進行統計和計算,計算其平均值,如表2所示。
由以上數據可知,現有市場上的產品造型,其形態,大多以沉重的和方正的為主,是因為產品自身在運行的過程中,需要給予患者足夠的安全感,不宜過于輕巧,但過于方正,又會增加患者因觸碰受傷的風險,因此,應摻雜少許較為圓潤的元素。在色彩方面,現有產品的顏色搭配都過于單一,應在主體顏色基調相對簡約的同時,添加一些輔助顏色。材質方面,由于康復輔具類產品的結構大多較為復雜,并且要充分考慮到產品的安全性,因此其材質應選用強度較高的剛性材料。
4 設計實踐
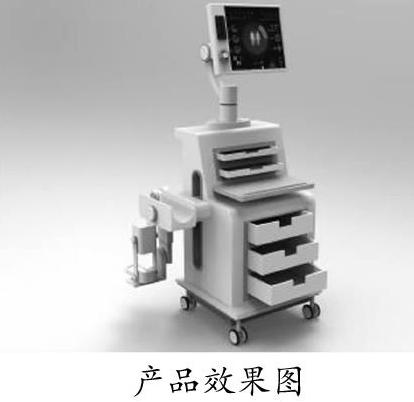
基于上文的分析研究,設計出一款單腿多自由度下肢康復訓練機器人。為了避免產品主體機構過于復雜,也為了降低產品自身的制造成本,因此采取單腿機構來協助患者進行康復訓練,主機與腿部連接部分,設有卡扣裝置,打開卡扣,橫向翻轉180°便可以實現另一側腿部的康復訓練。此外,腿部訓練機構共包含三個自由度,各個關節內部具有相應的限位裝置,以防止患者在進行康復訓練的同時,因為機器意外運轉所產生的二次傷害。在穿戴材料內部,包裹著生物電磁貼片,在進行康復訓練的過程中可以對患者的下肢肌肉產生刺激作用。另外,在產品主機身設有電子顯示屏,更加直觀的顯示患者自身的各項數據,相關醫護人員可以根據顯示的數據進一步模擬新的訓練計劃,幫助患者更好的進行下肢康復訓練。產品效果圖如下圖所示。
參考文獻:
[1]王秋惠,魏玉坤,劉力蒙.康復機器人研究與應用進展[J].包裝工程,2018,39(18):83-89.
[2]林木松.坐臥式下肢康復機器人機械設計及虛擬訓練系統開發[D].秦皇島:燕山大學,2017.
[3]周志勇.基于感性工學的護理床設計研究[J].包裝工程,2016,37(12):102-105.
[4]蘇建寧.感性工學及其在產品設計中的應用研究[J].西安交通大學學報,2004(1):60-63.
作者簡介:趙新宇(1995-),男,蒙古族,內蒙古赤峰人,研究生在讀,研究方向:工業設計工程。
猜你喜歡
科技與創新(2016年21期)2017-02-14 09:44:02
山東工業技術(2016年24期)2017-01-12 00:24:36
大學教育(2016年12期)2017-01-03 19:29:53
藝術科技(2016年10期)2016-12-14 20:11:18
藝術與設計·理論(2016年10期)2016-11-04 16:29:48
文藝生活·中旬刊(2016年10期)2016-11-04 06:29:49
科技視界(2016年20期)2016-09-29 11:47:01
中國科技博覽(2016年6期)2016-04-25 10:43:27
科技視界(2016年8期)2016-04-05 09:11:14
青春歲月(2015年14期)2015-07-29 14:40:38