基于電動汽車永磁同步電動機的控制策略
2020-10-20 06:04:07聶光輝
中國新技術新產品 2020年14期
關鍵詞:控制策略
聶光輝


摘? 要:由于電動汽車用永磁同步電機要滿足車輛在各種負荷下的起步、加速、勻速行駛、減速和制動等不同工況的要求,因此其必須能夠快速響應并且調速范圍廣,控制系統對永磁同步電機來說非常重要,通過控制系統能夠使電機在不同行駛工況下都能正常的工作。
關鍵詞:電動汽車;驅動電機;控制策略
中圖分類號:TM341? ? ? ? ? ? 文獻標志碼:A
目前絕大多數的電動汽車用可調速的永磁同步電機都屬于自控式的,所謂自控式是指通過檢測轉子位置和轉速并反饋信息,確保電機系統和逆變器一直處于同步狀態。常見的對永磁同步電機的控制方式有恒壓頻比開環控制、失量控制、直線轉矩控制和智能控制等控制方式。分別實現在不同行駛場合下對永磁同步電機的起動、加速、正轉、反轉及能量回收的控制。
近些年來,交流電機上常用的控制方式有開環控制、矢量控制、直接轉矩控制及智能控制等,這些控制方式既能用于交流異步電機,同時也能用于在我國具有得天獨后發展前景的永磁同步電機上。我國是稀土儲量和產量大國,稀土又是制造電機永磁體的重要原料。交流異步電機廣泛應用于電力機車和商用電動汽車上,由于永磁同步電機具有體積小、質量輕、其轉子上有永磁體不需要通電等優點,因此越來越多的乘用車采用該電機作為動力裝置來驅動車輪行駛,也正是因為其轉子不需要通電,給它的控制帶來了困難。
1 永磁同步電機的開環控制
永磁同步電機的開環控制(VVVF)是交流電動機變頻調速最基本的控制方式,簡稱變頻調速系統,也稱恒壓頻比開環控制。能應用在大多數對調速性能要求一般的交流電動機調速控制系統中,并且使用方便,是通用變頻器的基本模式。
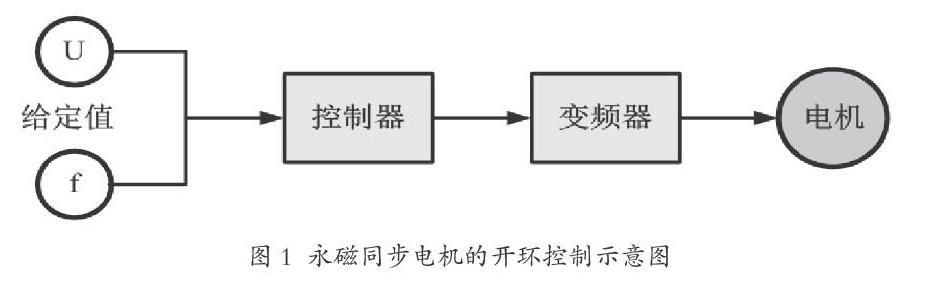
永磁同步電機的開環控制原理是控制器對給定或者預先設定好的電壓及頻率進行分析和計算,然后控制輸入變頻器的三相正弦交流電壓值及頻率,使之隨給定或者預先設定好的電壓及頻率的變化而變化,從而改變定子繞組的磁場旋轉速率,轉子的旋轉速度也隨之改變,也就改變了電機的轉速,如圖1所示。
開環控制在基頻(指電機在額定扭矩時的頻率)以下的調速過程中的轉差率不隨轉速的變化而變化,電動機的機械特性比較硬,調速范圍寬,無論高速還是低速時工作效率都比較高。
但由于該種控制方式沒有位置傳感器檢測轉子速度和位置的信號,屬于開環控制,因此難以準確控制電磁轉矩,在電動汽車行駛中開空調或者上坡時,突加的負荷可能會導致轉子轉速降低,甚至是停轉。所以不適合對電動汽車上的永磁同步電機進行控制。
2 矢量控制
矢量控制(VC)最初應用于異步電機,后來引入交流同步電機的控制系統中,矢量控制的核心是轉矩控制,將直流調速系統的理論應用到永磁同步電機的控制策略中,可以精確控制交流同步電機的動態響應,并使電機實現大范圍調速控制[1],滿足電動汽車對動力的需求。
由于永磁同步電動機轉子的轉速和旋轉磁場的轉速相同,轉子對控制效果影響比較小,所以只需要檢測和定子的電流矢量,就能實現控制轉矩的目的,如圖2所示。具體來說,是將永磁同步電機的定子電流矢量分解為產生磁場的勵磁電流分量和產生轉矩的轉距電流分量,并分別對2個分量的幅值和相位進行控制。
根據矢量控制范圍的不同,該控制方法主要有最大轉矩/電流控制、id=0控制(id即電流i在矢量坐標系里的d軸上的分量為零。通常d軸電流為勵磁電流)、弱磁控制和最大輸出功率控制等[1]。其中控制方式最簡單的是弱磁控制,其可以改善電機的調速性能。為了在高速時獲得更寬廣的功率運行范圍,電動汽車對永磁同步電機的高速運行通常采用弱磁控制。
3 直接轉矩控制
直接轉矩控制(DTC)是在20世紀80年代后期提出的,首先在交流異步電動機的控制中應用,后來逐漸推廣到弱磁區域以及永磁同步電動機的控制中,其控制原理的核心是通過直接控制電機的轉矩來控制其轉速。
直接轉矩控制系統由速度控制器、調節器、PWM逆變器、磁鏈和轉矩計算模塊、速度傳感器及和永磁同步電動機等部份組成。直接轉矩控制只需檢測定子繞組的電壓和電流,就能通過控制器去計算電磁轉矩,并與給定值進行比較,實現轉矩的直接控制[2]。
永磁同步電動機直接轉矩控制的控制過程如圖3所示,控制系統對逆變器輸出的三相電壓和電流進行檢測,輸入坐標變換模塊并進行變換后,進入磁鏈和轉矩計算模塊進行分析,測算出永磁同步電機的定子磁鏈,由此得出轉子的瞬時轉矩。
電動機的實際轉速可通過速度調節器(轉子位置傳感器)獲得,例如現在電動汽車永磁同步電機上廣泛采用的旋轉變壓器就是轉子位置傳感器的一種。電動機的實際轉速與轉子的基準轉速比較,確定出基準轉矩,并與通過轉子位置傳感器檢測的實際轉矩相比較,再經過逆變器輸出控制脈沖信號。
直接轉矩控制的原理框圖如圖3所示,實際轉速值ω與轉速參考值ω*相比較,得到轉矩參考值T*。經轉矩調節與反饋轉矩T比較所得的轉矩差做滯環處理,得到轉矩控制信號τ。再將定子磁鏈參考值φS*跟定子磁鏈實際值φS相比,經磁鏈調節得到磁鏈控制信號φ。從PWM逆變器傳遞的直流側電壓Udc及電機的三相交流電壓經過坐標變換,分別轉換成α軸實測電流iα、β軸實測電流iβ、α軸實測電壓uα和β軸實測電壓uβ,并在矩陣和磁鏈比較器中進行計算,輸出扇區信號,并和轉矩控制信號τ和磁鏈控制信號φ共同進入開關選擇,生成PWM脈沖寬度調制信號,輸出給PWM逆變器,給電機供電。
直接轉矩控制極大地簡化了信號的處理難度,電動機參數影響也較小,抗干擾能力強,轉矩響應快,被廣泛應用于電動汽車的交流電機的控制器中。
4 智能控制
為了提高永磁同步電動機的智能控制能力,就必須不依賴或者不完全依賴控制對象的模型,以此來為以后實現自動駕駛功能奠定基礎。
交流電動機控制系統采用由速度環和電流環構成的雙閉環控制結構,對電流環的控制采用矢量控制和直接轉矩控制方式,能保證電機控制系統的動態響應。在速度環中,經常采用智能PI控制器實現對速度環的控制,大大提高了系統的整合性能。
在雙閉環控制結構中,智能PI控制器相當于速度控制器,電流和轉矩的控制仍采用VC控制和DTC控制等控制方法,使系統的性能達到最優。
從目前來看,智能控制要應用在對電動汽車的永磁同步電動機控制中,還只是一個概念,相信在不久的將來,智能控制會越來越多的應用在電動汽車的電機控制中,開啟智能駕駛和無人駕駛的新時代。
總之,電動汽車廣泛采用的永磁同步電機一般都采用自控式變頻調速,通過轉子位置傳感器為控制系統提供轉子位置信號,從而實現對電機轉矩的精確控制,滿足電動汽車對電動機的智能控制要求。
參考文獻
[1]張寬,文紅舉,范鈺琢,等.電動車用永磁同步電機矢量控制策略[J].汽車工程師,2017(1):38-40.
[2]陳福民,王海仙,譚茀娃,等.感應電動機直接轉矩控制及其發展[J].電工技術雜志,1994(1):29-32.
猜你喜歡
艦船科學技術(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
山東工業技術(2016年15期)2016-12-01 05:31:37
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(2016年5期)2016-03-22 01:09:38
電機與控制應用(2015年2期)2015-03-01 03:49:24
電測與儀表(2014年24期)2014-04-09 11:35:36
